Das könnte Ihnen auch gefallen
- Geology Report Group 6Dokument19 SeitenGeology Report Group 6Muiz Sofi100% (1)
- Linear Programming ModelDokument83 SeitenLinear Programming ModelMacheas IbrahimNoch keine Bewertungen
- Notes 3Dokument8 SeitenNotes 3Sriram BalasubramanianNoch keine Bewertungen
- Linear Programming ModelDokument83 SeitenLinear Programming ModelYoungsonya JubeckingNoch keine Bewertungen
- Sample Linear ProgrammingDokument37 SeitenSample Linear ProgrammingmarianaNoch keine Bewertungen
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Von EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Bewertung: 2.5 von 5 Sternen2.5/5 (2)
- OR NotesDokument109 SeitenOR NotesSagar AgrawalNoch keine Bewertungen
- Business Maths Chapter 4Dokument23 SeitenBusiness Maths Chapter 4鄭仲抗Noch keine Bewertungen
- Linear ProgramDokument32 SeitenLinear ProgramSoumya Bsoumya100% (1)
- Exam 1 RevDokument4 SeitenExam 1 Revmexefon390Noch keine Bewertungen
- Lec 04 - Week 04 Operations ResearchDokument56 SeitenLec 04 - Week 04 Operations Researchbnzayd2005Noch keine Bewertungen
- Linier Programming (I)Dokument33 SeitenLinier Programming (I)Excellino Nehemia LaksonoNoch keine Bewertungen
- HW7 SolutionDokument9 SeitenHW7 SolutionprakshiNoch keine Bewertungen
- Tutorial 5 ADokument7 SeitenTutorial 5 AlolkaNoch keine Bewertungen
- Linear Programming ProblemsDokument37 SeitenLinear Programming ProblemsDhirajNoch keine Bewertungen
- X X B, X 0, 6 B The Linear Programming ProblemDokument3 SeitenX X B, X 0, 6 B The Linear Programming ProblemKiran KumariNoch keine Bewertungen
- October 10, 2022 1 / 100Dokument105 SeitenOctober 10, 2022 1 / 100Girik KhullarNoch keine Bewertungen
- Linaer Programming NotedDokument13 SeitenLinaer Programming NotedTäð Œvê MîðNoch keine Bewertungen
- Chapter 2 DMMDokument57 SeitenChapter 2 DMMPratibha GoswamiNoch keine Bewertungen
- Graphical Method To Solve LPPDokument19 SeitenGraphical Method To Solve LPPpraveenNoch keine Bewertungen
- 5 Solutions of Linear ProgramsDokument4 Seiten5 Solutions of Linear ProgramsHillal TOUATINoch keine Bewertungen
- Topics Entry Test IBEB NonCD Version 2014Dokument5 SeitenTopics Entry Test IBEB NonCD Version 2014YonYonNoch keine Bewertungen
- 3E4 Lecture 3Dokument21 Seiten3E4 Lecture 3Ke12ZedNoch keine Bewertungen
- Solving LP Models: Improving SearchDokument93 SeitenSolving LP Models: Improving SearchAzlan MunirNoch keine Bewertungen
- TD3 - Simplex AlgorithmDokument5 SeitenTD3 - Simplex AlgorithmphenomenNoch keine Bewertungen
- Linear ProgrammingDokument37 SeitenLinear ProgramminglaestatNoch keine Bewertungen
- LinearProgramming IDokument49 SeitenLinearProgramming IlincolNoch keine Bewertungen
- Lecture 2 (Introduction To LPP)Dokument29 SeitenLecture 2 (Introduction To LPP)Shipra NarauneyNoch keine Bewertungen
- Operations ResearchDokument19 SeitenOperations ResearchKumarNoch keine Bewertungen
- Simplex MethodDokument58 SeitenSimplex MethodRohit KumarNoch keine Bewertungen
- hw1 PDFDokument3 Seitenhw1 PDFJason HoffmanNoch keine Bewertungen
- 1 - Theory of Maxima and MinimaDokument31 Seiten1 - Theory of Maxima and MinimaBogdan ManeaNoch keine Bewertungen
- Linear Programming: Presented by - Meenakshi TripathiDokument13 SeitenLinear Programming: Presented by - Meenakshi TripathiRajendra PansareNoch keine Bewertungen
- Linear ProgrammingDokument13 SeitenLinear ProgrammingSanjoy BrahmaNoch keine Bewertungen
- Industrial Engineering (IE)Dokument22 SeitenIndustrial Engineering (IE)محمد ناصر عليويNoch keine Bewertungen
- Session 05-Handouts On Simplex MethodDokument60 SeitenSession 05-Handouts On Simplex MethodSIRSHA PATTANAYAKNoch keine Bewertungen
- Graphical Solution of LP Problems Hand-OutDokument11 SeitenGraphical Solution of LP Problems Hand-Outdeleonjaniene bsaNoch keine Bewertungen
- Optimasi LPDokument30 SeitenOptimasi LPKarya Jaya ZendratoNoch keine Bewertungen
- bmt1014 Chap03 Linear ProgrammingDokument26 Seitenbmt1014 Chap03 Linear Programmingapi-305852139Noch keine Bewertungen
- Note3 SimplexDokument22 SeitenNote3 Simplexアユ ギタNoch keine Bewertungen
- Graphical Solution of Linear Programming ModelsDokument44 SeitenGraphical Solution of Linear Programming ModelsNoor AsikinNoch keine Bewertungen
- UUM 526 Optimization Techniques in Engineering Spring 2018-2019 Problem Set IDokument3 SeitenUUM 526 Optimization Techniques in Engineering Spring 2018-2019 Problem Set I_MerKeZ_Noch keine Bewertungen
- Linear Inequalities Linear Programming ProblemsDokument1 SeiteLinear Inequalities Linear Programming Problemsnabhijain9Noch keine Bewertungen
- LPDokument49 SeitenLPAlefiahMNoch keine Bewertungen
- Econ LectureDokument35 SeitenEcon Lectureicopaf24Noch keine Bewertungen
- Linear ProgrammingDokument88 SeitenLinear ProgrammingNomanqureshiNoch keine Bewertungen
- OR2A - Mr. DeepakDokument39 SeitenOR2A - Mr. DeepakshariqNoch keine Bewertungen
- Métodes ExactesDokument48 SeitenMétodes ExactesSouhir ZribiNoch keine Bewertungen
- Extra Exercises PDFDokument232 SeitenExtra Exercises PDFShy PeachDNoch keine Bewertungen
- Unit 3 Math OverviewDokument7 SeitenUnit 3 Math OverviewmicjenNoch keine Bewertungen
- Definition of A Linear ProgramDokument6 SeitenDefinition of A Linear ProgramHarsha VardhanNoch keine Bewertungen
- Lecture 4-Filled Out PDFDokument6 SeitenLecture 4-Filled Out PDFShanay ThakkarNoch keine Bewertungen
- IE426 - Optimization Models and Application: 1 Goal ProgrammingDokument10 SeitenIE426 - Optimization Models and Application: 1 Goal Programminglynndong0214Noch keine Bewertungen
- Nonlinear OptimizationDokument6 SeitenNonlinear OptimizationKibria PrangonNoch keine Bewertungen
- INDE 513 hw1 SolDokument7 SeitenINDE 513 hw1 SolWei GuoNoch keine Bewertungen
- MATLAB SOLUTION OF LP PROBLEMS 5 Nov 2022Dokument14 SeitenMATLAB SOLUTION OF LP PROBLEMS 5 Nov 2022Muhamad KhoirNoch keine Bewertungen
- BV Cvxbook Extra ExercisesDokument237 SeitenBV Cvxbook Extra ExercisesWilian GuamánNoch keine Bewertungen
- SOLDokument11 SeitenSOLJD DLNoch keine Bewertungen
- Admm HomeworkDokument5 SeitenAdmm HomeworkNurul Hidayanti AnggrainiNoch keine Bewertungen
- Mathematics - Ijmcar - An Approach For Continuous Method For The GeneralDokument12 SeitenMathematics - Ijmcar - An Approach For Continuous Method For The GeneralTJPRC PublicationsNoch keine Bewertungen
- Drmos Specifications: November 2004 Revision 1.0Dokument17 SeitenDrmos Specifications: November 2004 Revision 1.0Tran Xuan NamNoch keine Bewertungen
- Form 5 Math Notebook 2021-2022Dokument183 SeitenForm 5 Math Notebook 2021-2022Kyra AmbroseNoch keine Bewertungen
- Prismic R10: Product SpecificationDokument2 SeitenPrismic R10: Product SpecificationParag HemkeNoch keine Bewertungen
- ST-130 - Manual PDFDokument27 SeitenST-130 - Manual PDFJean TorreblancaNoch keine Bewertungen
- Predicting and Specifying The Perceived Colors of Reflective ObjectsDokument10 SeitenPredicting and Specifying The Perceived Colors of Reflective ObjectsEpic WinNoch keine Bewertungen
- Expansion Model Test of Expansive Soil in Different Stress State BDokument11 SeitenExpansion Model Test of Expansive Soil in Different Stress State BHuang BenNoch keine Bewertungen
- Antenna Radiation Electromagnetic Electrical Resistance Ohm MeterDokument6 SeitenAntenna Radiation Electromagnetic Electrical Resistance Ohm Meterbiswa217Noch keine Bewertungen
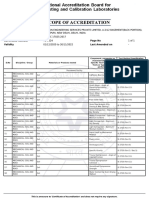
- Scope TC 9124Dokument1 SeiteScope TC 9124Esscon Engineering Services Pvt. Ltd.Noch keine Bewertungen
- MASERDokument23 SeitenMASERMuzzamil ShaikhNoch keine Bewertungen
- Swd-Csa-A23.3-04 (Etabs2013)Dokument81 SeitenSwd-Csa-A23.3-04 (Etabs2013)BJERNoch keine Bewertungen
- Sorge 2015Dokument18 SeitenSorge 2015Masih LoghmaniNoch keine Bewertungen
- Kanako Detailed ManualDokument74 SeitenKanako Detailed ManualastikaprasiddhaNoch keine Bewertungen
- Lecture 1 - Introduction To Engineering OptimizationDokument57 SeitenLecture 1 - Introduction To Engineering OptimizationTafesse100% (1)
- Comparison Between - MB - BE - FDDokument5 SeitenComparison Between - MB - BE - FDSoumajit DasNoch keine Bewertungen
- Capacidad de ConductoresDokument4 SeitenCapacidad de ConductoresCämpänitä FentyNoch keine Bewertungen
- Colonial ZF SeriesDokument2 SeitenColonial ZF SeriesmndmattNoch keine Bewertungen
- Tosaca Catalogue PDFDokument16 SeitenTosaca Catalogue PDFgabNoch keine Bewertungen
- Ecoupled Understanding Wireless PowerDokument14 SeitenEcoupled Understanding Wireless PowerLeon BurgerNoch keine Bewertungen
- BroombastickDokument3 SeitenBroombastickAllen SornitNoch keine Bewertungen
- Paper 89672Dokument16 SeitenPaper 89672RUDHRA DHANASEKARNoch keine Bewertungen
- CEG 4011 S15 TibbettsDokument5 SeitenCEG 4011 S15 TibbettsGeotekers ItenasNoch keine Bewertungen
- 18-Division 2-Section 02900 PP Pipelines, Materials, Installation & TestingDokument19 Seiten18-Division 2-Section 02900 PP Pipelines, Materials, Installation & TestingAvaan IvaanNoch keine Bewertungen
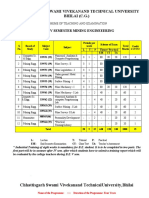
- Mine Machinery-1 SyllabusDokument3 SeitenMine Machinery-1 SyllabusrrathoreNoch keine Bewertungen
- TDS For Rubber Lining 1056HTDokument2 SeitenTDS For Rubber Lining 1056HTYao WangNoch keine Bewertungen
- Viado, Emmanuel Russell PDokument27 SeitenViado, Emmanuel Russell PRussell ViadoNoch keine Bewertungen
- Physics A+ TestDokument3 SeitenPhysics A+ TestMirza Umar Farooq BaigNoch keine Bewertungen
- Astm D36Dokument4 SeitenAstm D36Sachin Kumar Singh33% (3)
- Grade 7 Mixtures and Solutions Full ReviewDokument28 SeitenGrade 7 Mixtures and Solutions Full Reviewblackcat657Noch keine Bewertungen