Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Modern Steel ConstructionDokument70 SeitenModern Steel ConstructionohundperNoch keine Bewertungen
- 06 Renr5908 08 01 All PDFDokument108 Seiten06 Renr5908 08 01 All PDFFrancisco Ospino Arrieta100% (2)
- Psychological Well Being - 18 ItemsDokument5 SeitenPsychological Well Being - 18 ItemsIqra LatifNoch keine Bewertungen
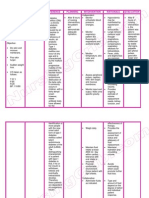
- Nursing Care Plan Diabetes Mellitus Type 1Dokument2 SeitenNursing Care Plan Diabetes Mellitus Type 1deric85% (46)
- MHD Exam 6 MaterialDokument179 SeitenMHD Exam 6 Materialnaexuis5467100% (1)
- Computer Forensics ReportDokument7 SeitenComputer Forensics ReportMatias IacobuzioNoch keine Bewertungen
- Evelyn Arizpe - Teresa Colomer - Carmen Martínez-Roldán - Visual Journeys Through Wordless Narratives - An International Inquiry With Immigrant Children and The Arrival-Bloomsbury Academic (2014)Dokument290 SeitenEvelyn Arizpe - Teresa Colomer - Carmen Martínez-Roldán - Visual Journeys Through Wordless Narratives - An International Inquiry With Immigrant Children and The Arrival-Bloomsbury Academic (2014)Lucia QuirogaNoch keine Bewertungen
- Floating Solar Photovoltaic Systems - An Overview and Their Feasibility at Kota in Rajasthan - IEEE Conference Publication - IEEE XploreDokument3 SeitenFloating Solar Photovoltaic Systems - An Overview and Their Feasibility at Kota in Rajasthan - IEEE Conference Publication - IEEE XploreJames KazoobaNoch keine Bewertungen
- Difference Between Dada and SurrealismDokument5 SeitenDifference Between Dada and SurrealismPro FukaiNoch keine Bewertungen
- Azure Arc DoccumentDokument143 SeitenAzure Arc Doccumentg.jithendarNoch keine Bewertungen
- National Article Writing Competition 2020: Centre For Competition and Investment Laws and PolicyDokument8 SeitenNational Article Writing Competition 2020: Centre For Competition and Investment Laws and PolicyNisha PasariNoch keine Bewertungen
- FS1 Worksheet Topic 6Dokument2 SeitenFS1 Worksheet Topic 6ALMALYN ANDIHNoch keine Bewertungen
- Preparatory Newsletter No 3 2013Dokument22 SeitenPreparatory Newsletter No 3 2013SJC AdminNoch keine Bewertungen
- Paper 19 AugustDokument552 SeitenPaper 19 AugustUma Sankar Pradhan100% (1)
- I. Errors, Mistakes, Accuracy and Precision of Data Surveyed. A. ErrorsDokument53 SeitenI. Errors, Mistakes, Accuracy and Precision of Data Surveyed. A. ErrorsJETT WAPNoch keine Bewertungen
- Programmable Logic Controllers: Basic Ladder Logic ProgrammingDokument9 SeitenProgrammable Logic Controllers: Basic Ladder Logic Programminganuradha19Noch keine Bewertungen
- Ask NasaDokument68 SeitenAsk Nasacavaco2008Noch keine Bewertungen
- Pro Con ChartDokument3 SeitenPro Con Chartapi-461614875Noch keine Bewertungen
- RegistryDokument4 SeitenRegistryRajan KhandelwalNoch keine Bewertungen
- ICCM2014Dokument28 SeitenICCM2014chenlei07Noch keine Bewertungen
- NM Integrative Wellness MRC Public Health Acupuncture JITTDokument40 SeitenNM Integrative Wellness MRC Public Health Acupuncture JITTPrince DhillonNoch keine Bewertungen
- Culture Performance and Economic Return of Brown ShrimpDokument8 SeitenCulture Performance and Economic Return of Brown ShrimpLuã OliveiraNoch keine Bewertungen
- Steve Talbott Getting Over The Code DelusionDokument57 SeitenSteve Talbott Getting Over The Code DelusionAlexandra DaleNoch keine Bewertungen
- Secondary Scheme of Work Form 2Dokument163 SeitenSecondary Scheme of Work Form 2Fariha RismanNoch keine Bewertungen
- Symbolic Interaction Theory: Nilgun Aksan, Buket Kısac, Mufit Aydın, Sumeyra DemirbukenDokument3 SeitenSymbolic Interaction Theory: Nilgun Aksan, Buket Kısac, Mufit Aydın, Sumeyra DemirbukenIgor Dutra BaptistaNoch keine Bewertungen
- Quiz Application in Visual BasicDokument20 SeitenQuiz Application in Visual BasicShivangi SahaNoch keine Bewertungen
- A. Erfurth, P. Hoff. Mad Scenes in Early 19th-Century Opera PDFDokument4 SeitenA. Erfurth, P. Hoff. Mad Scenes in Early 19th-Century Opera PDFbiarrodNoch keine Bewertungen
- Class XI-Writing-Job ApplicationDokument13 SeitenClass XI-Writing-Job Applicationisnprincipal2020Noch keine Bewertungen
- Solution Manual For Understanding Business 12th Edition William Nickels James Mchugh Susan MchughDokument36 SeitenSolution Manual For Understanding Business 12th Edition William Nickels James Mchugh Susan Mchughquoterfurnace.1ots6r100% (51)
- Negotiation Homework AssignmentDokument3 SeitenNegotiation Homework AssignmentEunice Lourenço TanganeNoch keine Bewertungen