Beruflich Dokumente
Kultur Dokumente
Theorie Des Mecanismes Mis
Hochgeladen von
Semlali ZakariaCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Theorie Des Mecanismes Mis
Hochgeladen von
Semlali ZakariaCopyright:
Verfügbare Formate
Ecole Nationale dingnieurs de sousse
Mastre Mcanique et Ingnierie des
Systmes
Abdelfattah MLIKA
Janvier 2010
Table de matire
I. Dfinitions :
I.1 Thorie des mcanismes.1
I.2 Liaison mcanique, degr de libert..2
I.3 Torseur cinmatique...2
I.4 Torseur des actions de liaison . 2
I.5 Couple cinmatique, liaison compose, liaison complexe .2
I.6 Degr de mobilit.3
I.7 Degr dhyperstatisme3
II. Analyse des mcanismes : ..4
II.1 Analyse statique.4
II.1.1 Actions extrieures..4
II.1.2 Actions de liaisons.. 4
II.1.3 Mise en quations .. 5
II.1.4 Analyse du systme linaire et rsultats....5
II.1.5 Ecriture matricielle du systme linaire6
II.2 Analyse cinmatique . 9
II.2.1 Torseurs cinmatiques associs aux liaisons. 9
II.2.2 Mise en quations.9
II.2.3 Analyse du systme linaire et rsultats10
II.2.4 Hyperstatisme au sens cinmatique...10
II.3 Mthode rapide de formation du systme statique . 12
II.3.1 Cas 1 : Train picyclodal un seul satellite et couronne mobile 12
II.3.2 Cas 2 : Train picyclodal un seul satellite et couronne fixe. 16
II.3.3 Cas 3 : Train picyclodal deux satellites et couronne fixe... 16
III. Loi de mobilit globale ....... 19
IV. Analyse numrique de mcanismes ...19
IV.1 Analyse cinmatique...19
IV.1.1 Choix des vitesses gnralises....21
IV.1.2 Application : mcanisme dessuie-glace....21
IV.2 Analyse statique .......24
IV.2.1 triangularisation du systme statique....24
IV.2.2 Relations entre-sortie gnrales....24
IV.2.3 Efforts calculables et efforts non calculables.....25
IV.2.4 Distribution et choix des hyperstaticits....26
IV.2.5 Application : mcanisme 4 barres...26
IV.3 Recherche systmatique des solutions isostatiques .....28
IV.3.1 Obtention des solutions isostatiques par limination directe des
efforts hyperstatiques......28
IV.3.2 Obtention des solutions isostatiques par ajout des nouvelles
liaisons......30
Thorie des mcanismes 1
I. Dfinitions :
I.1 Thorie des mcanismes :
La thorie des mcanismes a pour but essentiel la rationalisation de la conception mcanique
des systmes de solides indformables. Selon quil sagit de lanalyse ou de la synthse dun
mcanisme, les objectifs viss par cette science sont diffrents.
Dans le cas de lanalyse, le mcanisme est dj existant ou en cours de conception. Il sagit
alors, partir de son schma cinmatique et de ses caractristiques gomtriques :
de vrifier son comportement cinmatique et dynamique ;
didentifier ses mobilits et ses hyperstaticits.
Dans le cas de la synthse, il sagit de ltablissement des projets de mcanismes possdant
des caractristiques structurales, cinmatiques et dynamiques donnes susceptibles de
produire des mouvements donns
I.2 Liaison mcanique, degr de libert :
Cest une liaison par contact mcanique entre deux solides. Ces derniers seront privs,
obligatoirement, de certains dplacements relatifs.
Le degr de libert dune liaison (d.d.l.) est le nombre des dplacements relatifs indpendants
quelle autorise. Le d.d.l. varie entre 0 et 5 pour les liaisons usuelles.
I.3 Torseur cinmatique :
Le comportement cinmatique dun solide j par rapport un solide i est dcrit par le torseur
cinmatique
j / i
0 .
k k 2 2 1 1 i / j
q q q , + + , + , = 0
k = d.d.l .
1 k
, , , , : Torseurs gomtriques.
Dune faon gnrale,
k
, a pour rduction en un point O
(
. c + o
c
= ,
k
k
k k k
k k
) o ( k
z OO z
z
k
z
est le vecteur unitaire de laxe du dplacement. O
k
est un point de cet axe
k
0 pour undplacement en translation
1 pour les autres cas
et
k
1 pour undplacement en t ranslation
ou pas du mouvement hlicoidal
i
j
Figure 1 : Liaison entre i et j
Thorie des mcanismes 2
Exemple:
Pour une liaison sphrique
Trois dplacements angulaires sont autoriss par cette liaison
u
1
, u
2
, u
3
. Le d.d.l. tant gal 3
u
u
u
= 0
(
(
(
(
(
(
(
(
u
u
u
= 0
(
(
(
(
(
(
(
(
u +
(
(
(
(
(
(
(
(
u +
(
(
(
(
(
(
(
(
u = 0
0
0
0
) O ( ou
0
0
0
) O (
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
) O (
3
2
1
1 / 2
3
2
1
1 / 2 3 2 1 1 / 2
Remarque : pour simplifier lcriture on omet le point sur les vitesses
u
u
u
= 0
0
0
0
) O (
3
2
1
1 / 2
I.4 Torseur des actions de liaison :
Les actions de liaison sont reprsentes par le torseur tel que la puissance de ces
actions soit nulle.
P
ij /R
= = 0
Exemple:
Cherchons le torseur
pour la liaison sphrique. Soit = ;
Pour que le comoment . = X.0 + Y.0 + Z.0 + u
1
L + u
2
M + u
1
N = 0
soit nul u
1
, u
2
, u
3
il faut que le torseur des actions de i sur j le plus gnral aura la forme
suivante :
=
0 Z
0 Y
0 X
O
I.5 Couple cinmatique, liaison compose, liaison complexe :
Un contact unique entre deux solides ralise un couple cinmatique. Si la zone de contact est
une surface on dit que le couple est infrieur. Le d.d.l. dans ce cas est s 3. En particulier nous
distinguons les couples usuels suivants :
P (Prismatique. Glissire), R (Pivot. Rotode), C (Cylindrique), S (sphrique) et G (Plan).
j i
i / j
0
j i
j i
j i
N Z
M Y
L X
O
j i
i / j
0
j i
x
y
z
Figure 2 : Liaison sphrique
Thorie des mcanismes 3
Si la zone du contact est une ligne ou un point on dit que le couple est suprieur. Le d.d.l.
dans ce cas est tel que 3 < d.d.l. s 5.
La notion de liaison mcanique est plus gnrale que celle du couple cinmatique. En effet,
une liaison peut tre un couple ou une association de plusieurs couples ou mme une
association de plusieurs liaisons. Pour ce dernier cas, On utilise souvent le terme de liaison
quivalente ou encore, selon le type dagencement, une liaison complexe pour un
agencement en srie et une liaison compose pour un agencement en parallle.
Pour une liaison complexe (en srie) nous avons
=
=
0
1 k
k
et le d.d.l. = E d.d.l (l
k
)
Pour une liaison compose (en parallle) nous avons
i / j
0 = et d.d.l. = dim (
i / j
0 )
I.6 Degr de mobilit :
Le degr de mobilit ne concerne pas, comme le d.d.l, deux solides, mais un mcanisme dans
son entier. Il sagit du nombre maximum de vitesses gnralises qui dans ce mcanisme
peuvent tre choisies dune faon arbitraire, dans une configuration donne.
Il nexiste pas une formule directe qui calcule le degr de mobilit et qui est valable pour tous
les types des mcanismes. Les mcaniciens et surtout ceux qui travaillent sur les mcanismes
plans utilisent souvent la formule de Tchebychev-Grbler connue aussi sous le nom de la
formule de Kutzbach :
m = d (n1)
i
(d f )
Avec d = 3 pour les mcanismes plans et 6 pour les mcanismes spatiaux, n est le
nombre total des pices y compris le bti et f
i
est d.d.l de la liaison l
i
. Dans le cas des
mcanismes cycle unique cette formule se rduit m =
i
f d
car n = nombre des
liaisons .Mais cette formule
nest valable que pour les mcanismes isostatiques ou les
mcanismes hyperstatiques plans. En effet, elle est exactement gale la loi de mobilit
globale (que nous allons exposer pus loin au paragraphe III) lorsque le degr dhyperstaticit
h = 0.
Pour le mcanisme du bras manipulateur de la figure 6 on trouve m = 6 (41)
3
(6 1)
= 3.
Cest le bon rsultat car cest un mcanisme chane ouverte et le degr de mobilit dans ce
cas est la somme des d.d.l des liaisons. En faisant rfrence la dfinition du degr de
mobilit cite au dbut de ce paragraphe, chaque paramtre de liaison peut tre choisi dune
faon arbitraire indpendamment des deux autres. Ainsi si on bloque une ou deux des trois
liaisons le reste continue tre libre.
Pour le mcanisme 4 barres plan (ou mcanisme de Bennet plan) de la figure 7 on trouve
m =
4
1
6 = 2. Ce qui est faux car ce mcanisme est bien mobile. Son degr de mobilit est
gal 1 car les 4 liberts en rotation sont dpendantes et si on bloque lune deux le reste se
bloquera aussi. Ceci prouve bien la limitation de la formule de Chebychev-Grbler aux
i / j
0
k
0
Figure 5 : Agencement en parallle
j
i
j i
Figure 4 : Agencement en srie
Thorie des mcanismes 4
mcanismes isostatiques. Par contre en considrant que cest un mcanisme plan c'est--dire d
= 3 on trouvera le bon rsultat m =
4
1
3 = 1.
Exemples :
I.7 Degr dhyperstatisme :
Cest le nombre des actions de liaisons qui, en crivant les quations dquilibre (dynamique
ou statique) doivent tre donnes pour pouvoir calculer les autres dune faon unique.
Exemples :
II. Analyse des mcanismes :
Lanalyse dun mcanisme consiste lexploration de ses capacits cinmatiques et statiques.
En particulier :
les degrs de mobilit et dhyperstatisme ;
lidentification des vitesses gnralises et des efforts hyperstatiques ;
les relations entre-sortie ;
la distribution des mobilits (flux cinmatique)
la distribution des hyperstaticits.
II.1 Analyse statique :
Lanalyse statique a pour objectif :
de dterminer les mobilits potentielles explicites sous forme statique (relations
entre les efforts extrieurs) ;
dtudier, en cas de mcanisme hyperstatique, la rpartition des efforts
hyperstatiques.
h = 1
Figure 8 : Guidage en rotation avec
deux sphriques
h = 2
Figure 9 : Guidage en rotaion avec
appui plan et pivot glissant
m = 3
Figure 6 : bras manipulateur
m = 1
Figure 7 : mcanisme 4 barres
Thorie des mcanismes 5
o
n
y
z
1
2
j
Figure 11 : Contact de deux dents
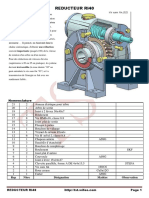
Nous allons exposer la procdure de cette analyse travers lexemple de lengrenage
cylindrique denture droite.
1
1
l
OA r
0
| |
|
|
|
\ .
2
2
l
AB r
0
| |
|
|
|
\ .
II.1.1 Actions extrieures:
=
0 0
0 0
C 0
0 0
0 0
C 0
2
2 ex
1
1 ex
II.1.2 Actions des liaisons :
* Liaison pivot daxe X
de 1 avec 0 :
=
01 01
01 01
01
O
1 0
N Z
M Y
0 X
* Liaison pivot daxe X
de 2 avec 0 :
=
02 02
02 02
02
B
1 0
N Z
M Y
0 X
* Liaison Linaire rectiligne daxe X
et de normale n
de 2 avec 1 :
) Z , Y , X (
12 12
12 12
A
2 1
) n , j , X (
12
12
A
2 1
M S R C
M C R S
0 0
0 R
M 0
0 0
o o
o o =
II.1.3 Mise en quations :
*Equilibre du solide 1 au point O :
C
1
C
2
X
Y
2
1
A
B
O
Figure 10 : engrenage cylindrique
Thorie des mcanismes 6
1 12
01 1
01 01 12 1 12 12
01 01 12 1 12 12
0 r C R
X 0 0 C
Y M R S l C R C M 0 0
Z N R C l S R C M 0 0
o
+ o o o =
` ` `
o o o
) )
)
* Equilibre du solide 2 au point B :
2 12
02 2
02 02 12 2 12 12
02 02 12 2 12 12
0 r C R
X 0 0 C
Y M R S l C R C M 0 0
Z N R C l S R S M 0 0
o
+ o o + o =
` ` `
o o o
) )
)
On obtient le systme suivant :
(1) X
01
= 0 (7) X
02
= 0
(2) Y
01
R
12
So = 0 (8) Y
02
+ R
12
So = 0
(3) Z
01
R
12
Co = 0 (9) Z
02
+ R
12
Co = 0
(4) r
1
Co R
12
= C
1
(10) r
2
Co R
12
= C
2
(5) M
01
+ l
1
Co R
12
Co M
12
= 0 (11) M
02
l
2
Co R
12
+ Co M
12
= 0
(6) N
01
l
1
So R
12
+ So M
12
= 0 (12) N
02
l
2
So R
12
So M
12
= 0
II.1.4 Analyse du systme linaire statique et rsultats :
a. Les deux quations (1) et (7) indiquent que X
01
= X
02
= 0
b. Les quations (4) et (10) permettent le calcul dune mme inconnue R
12
. Une de deux
quations est principale (au choix) et lautre est secondaire et doit vrifier le rsultat
de la premire. Une condition de compatibilit doit exister entre les deux quations.
1
12
1
2
2 1
2 1
12
1
C
(4) R
r C
r
C C
C r
(10) R
r C
=
o
=
`
o
)
Cette relation ne fait intervenir que des actions extrieures. Cest une relation entre-
sortie.
c. R
12
tant calcule par (4) ou (10), les inconnues suivantes sont alors calculables : Y
01
,
Z
01
, Y
02
, Z
02
.
d. Il reste les 4 quations suivantes pour dterminer 5 inconnues :
(5) M
01
Co M
12
= l
1
Co R
12
(6) N
01
+ So M
12
= l
1
So R
12
(11) M
02
+ Co M
12
= l
2
Co R
12
(12) N
02
So M
12
= l
2
So R
12
Le systme est indterminable dordre 1 1 effort hyperstatique (h = 1). Cet effort
peut tre choisi parmi : M
01
, N
01
, M
12
, M
02
, N
02
. Il doit tre donn pour pouvoir
calculer les autres.
Remarque : les efforts hyperstatiques peuvent tre calculs en utilisant le thorme de
minimisation de lnergie de dformation par exemple.
Thorie des mcanismes 7
II.1.5 Ecriture matricielle du systme statique :
Il est plus commode dappliquer linterprtation prcdente la matrice associe au systme
statique. Cela devient plus pratique lorsquil sagit dun degr de mobilit ou dhyperstatisme
suprieur 1 ou encore dans le cas des mcanismes plusieurs solides. Le systme linaire
prcdent issu de lquilibre statique de deux solides est
1
1
1
2
2
1 . . . . . . . . . . . (1)
. 1 . . . S . . . . . . (2)
. . 1 . . C . . . . . . (3)
. . . . . r C . . . . . . (4)
. . . 1 . l C C . . . . . (5)
. . . . 1 l S S . . . . . (6)
. . . . . . . 1 . . . . (7)
. . . . . S . . 1 . . . (8)
. . . . . C . . . 1 . . (9)
. . . . . r C . . . . . . (10)
. . . . . l C C . . . 1 . (11)
. . (12)
o
o
o
o o
o o
o
o
o
o o
01
01
01
01 1
01
12
12
02
02
02 2
02
02 2
X 0
Y 0
Z 0
M C
N 0
R 0
M 0
X 0
Y 0
Z C
M 0
N . . . l S S . . . . 1 0
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
=
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
o o
Lexamen de ce systme va nous permettre de retrouver les rsultats prcdents en appliquant
une mthode dlimination progressive des inconnues. Une ligne de la matrice, un seul
coefficient correspond une quation une seule inconnue. Cette inconnue est donc
calculable, le coefficient sera encercl et sa colonne barre. Cest le cas des inconnues X
01
(quation 1), X
02
(quation 7) et R
12
(quations 4 ou 10). Lensemble des colonnes barres
dfinit un niveau dlimination.
1
1
1
2
2
1 . . . . . . . . . . . (1)
. 1 . . . S . . . . . . (2)
. . 1 . . C . . . . . . (3)
. . . . . r C . . . . . . (4)
. . . 1 . l C C . . . . . (5)
. . . . 1 l S S . . . . . (6)
. . . . . . . 1 . . . . (7)
. . . . . S . . 1 . . . (8)
. . . . . C 1 . . 1 . . (9)
. . . . . r C . . . . . . (10)
. . . . . l C C . . . 1 . (11)
. . (12)
o
o
o
o o
o o
o
o
o
o o
01
01
01
01 1
01
12
12
02
02
02 2
02
02 2
X 0
Y 0
Z 0
M C
N 0
R 0
M 0
X 0
Y 0
Z C
M 0
N . . . l S S . . . . 1 0
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
=
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
o o
Si lissue dun niveau dlimination se dgagent des lignes o tous les coefficients sont
barrs sans quaucun ne soit encercl, alors ces lignes correspondront des quations
Thorie des mcanismes 8
secondaires. Lquation (10) est bien le cas, elle traduit la prsence dune mobilit exprime
par les rotations des solides 1 et 2 autour de OX
.
Nous rptons la mme opration dlimination pour les colonnes et les lignes restantes. Il
sagit dliminer les colonnes dont les coefficients sont devenus seuls dans leurs lignes aprs
le prcdent niveau dlimination. Les inconnues limines seront Y
01
, Z
01,
Y
02
et Z
02
. Aucune
quation secondaire nest dtecte ce deuxime niveau.
1
1
1
2
2
1 . . . . . . . . . . . (1)
. 1 . . . S . . . . . . (2)
. . 1 . . C . . . . . . (3)
. . . . . r C . . . . . . (4)
. . . 1 . l C C . . . . . (5)
. . . . 1 l S S . . . . . (6)
. . . . . . . 1 . . . . (7)
. . . . . S . . 1 . . . (8)
. . . . . C . . . 1 . . (9)
. . . . . r C . . . . . . (10)
. . . . . l C C . . . 1 . (11)
. . (12)
o
o
o
o o
o o
o
o
o
o o
01
01
01
01 1
01
12
12
02
02
02 2
02
02 2
X 0
Y 0
Z 0
M C
N 0
R 0
M 0
X 0
Y 0
Z C
M 0
N . . . l S S . . . . 1 0
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
=
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
o o
Le processus dlimination ne peut plus continuer puisque toutes les lignes restantes sont 2
coefficients. Le sous-systme restant est indtermin puisquil comporte 4 quations (5), (6),
(11) et (12) pour 5 inconnues M
01
, N
01
, M
12
, M
02
et N
02
. Pour dterminer lordre de
lindtermination du sous-systme ou encore le degr dhyperstatisme nous allons supposer
quune inconnue est donne et on reprend de nouveau la mthode dlimination
1
1
1
2
2
1 . . . . . . . . . . . (1)
. 1 . . . S . . . . . . (2)
. . 1 . . C . . . . . . (3)
. . . . . r C . . . . . . (4)
. . . 1 . l C C . . . . . (5)
. . . . 1 l S S . . . . . (6)
. . . . . . . 1 . . . . (7)
. . . . . S . . 1 . . . (8)
. . . . . C . . . 1 . . (9)
. . . . . r C . . . . . . (10)
. . . . . l C C . . . 1 . (11)
. . (12)
o
o
o
o o
o o
o
o
o
o o
01
01
01
01 1
01
12
12
02
02
02 2
02
02 2
X 0
Y 0
Z 0
M C
N 0
R 0
M 0
X 0
Y 0
Z C
M 0
N . . . l S S . . . . 1 0
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
=
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
( ( (
o o
En atteignant ce stade, tous les coefficients de la matrice sont encercls. Les inconnues M
01
,
M
12
, M
02
, N
12
, N
02
et N
01
forment un ensemble dans lequel il faut choisir un lment pour
pouvoir dterminer les autres. On dtecte ainsi un hyperstatisme de degr 1. En choisissant
Thorie des mcanismes 9
une inconnue dans cet ensemble comme inconnue hyperstatique (M
12
par exemple), les autres
deviennent des inconnues principales.
Dun autre ct, lquation secondaire (10) doit avoir avec lquation (4) une relation de
compatibilit pour pouvoir obtenir une valeur unique de R
12
. Cette relation est obtenue partir
de la condition de nullit du dterminant principal (compos des quations et des inconnues
principales) bord de lquation (10) et du second membre.
1 1
1
1
2
2
1 . . . . . . . . . . . (1)
. 1 . . . S . . . . . . (2)
. . 1 . . C . . . . . . (3)
. . . . . r C . . . . . C (4)
. . . 1 . l C . . . . . . (5)
. . . . 1 l S . . . . . . (6)
. . . . . . 1 . . . . . (7)
. . . . . S . 1 . . . . (8)
. . . . . C . . 1 . . . (9)
. . . . . l C . . . 1 . . (11)
. . . . . l S . . . . 1 . (12)
. . . (10)
o
o
o
o
o
o
o
o
o
2 2
0
. . r C . . . . . C
=
o
1 1
2
1 2 2 1 2 1
2 2 1
r C C
r
r C C r C C C C
r C C r
o
= o + o =
o
Nous retrouvons la relation entre-sortie qui correspond lunique mobilit du mcanisme.
En rsum de cette tude statique nous disons que :
Le degr dindtermination du systme statique est le degr dhyperstatisme.
Une quation secondaire dans le systme statique correspond une mobilit. La
condition de compatibilit de cette quation avec les quations principales donne une
relation entre sortie statique.
II.2 Analyse cinmatique :
Comme lanalyse statique, lanalyse cinmatique permet galement de dterminer les degrs
de mobilit et dhyperstatisme. Elle donne aussi la distribution des mobilits et permet le
choix des vitesses gnralises.
Nous allons considrer encore le mcanisme de lengrenage cylindrique pour illustrer cette
analyse.
II.2.1 Torseurs cinmatiques associs aux liaisons :
10 20
1/ 0 2/ 0
O O
0 0
0 0 0 0
0 0 0 0
o o
0 = 0 =
` `
) )
Thorie des mcanismes 10
12 12 12 12
2/1 12 12 12
12 12 12
A X, j,n A X,Y,Z
u u
0 v S C v
0 C S v
o o
0 = = o o
` `
o o
) )
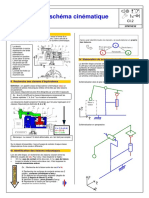
II.2.2 Mise en quations :
La mise en quations se fait partir de la condition de
fermeture de chaque cycle indpendant contenu dans le
graphe de liaisons. Lengrenage cylindrique est cycle
unique dfini par 0-1-2-0.
Lquation de fermeture de ce cycle scrit au point O :
0/1 1/ 2 2/ 0
0 0 + 0 + 0 =
Soit
12 12 1 12
10 20
12 12 1 12
1 2 20
12 12 1 12 1 12
u r C
0 0 0 0
0 0 S C w l C 0 0 0 0
0 0 0 (r r ) 0 0
C S w r l S
o + o
o o
o o o + =
` ` ` `
+ o
o o o + o
) ) )
)
On obtient le systme suivant :
10
20
12
1 12
1 12
1 2 1 1 12
1 1 1 0 0 0 (1) 0
0 0 0 S 0 0 (2) 0
0 0 0 C 0 0 (3) 0
0 0 0 r C 1 0 (4) 0
0 0 0 l C 0 C u (5) 0
0 (r r ) r l S 0 S w (6) 0
o ( ( (
( ( (
o o
( ( (
( ( ( o o
=
( ( (
o
( ( (
( ( (
o o
( ( (
+ o o
( (
II.2.3 Analyse du systme linaire et rsultats :
10
20
12
1 12
1 12
1 2 1 1 12
1 1 1 0 0 0 (1) 0
0 0 0 S 0 0 (2) 0
0 0 0 C 0 0 (3) 0
0 0 0 r C 1 0 (4) 0
0 0 0 l C 0 C u (5) 0
0 (r r ) r l S 0 S w (6) 0
o ( ( (
( ( (
o o
( ( (
( ( ( o o
=
( ( (
o
( ( (
( ( (
o o
( ( (
+ o o
( (
On va appliquer la mme mthode dlimination progressive des inconnues pour retrouver les
degrs de mobilit et dhyperstatisme du mcanisme.
Le premier niveau dlimination dbouche sur llimination de
12
et sur lquation secondaire
(3). La prsence dune telle quation implique lexistence dune hyperstaticit puisque
12
se
trouve annule deux fois (quations (2) et (3)) par deux obstacles dont un est obligatoirement
surabondant.
Le deuxime et dernier niveau dlimination carte les deux vitesses u
12
et v
12
mais il ne
donne pas des nouvelles quations secondaires.
0 1
2
Pivot
Linaire
rectiligne
Pivot
Figure 12 : graphe de liaisons de
lengrenage cylindrique
Thorie des mcanismes 11
Aprs ces deux niveaux dlimination il reste le sous-systme de deux quations 3
inconnues suivant :
10
20
1 2 1
12
1 1 1 (1) 0
0 (r r ) r (6) 0
o (
( (
(
o =
( (
(
+
( o
Une inconnue est obligatoirement surabondante. Le rang de ce systme est gal 2. Nous
pouvons vrifier facilement que quelque soit linconnue parmi les trois du sous-systme les
deux autres seront dtermines dune faon unique. Ce mcanisme ncessite une seule vitesse
gnralise. Son degr de mobilit tant donc gal 1. La vitesse gnralise peut tre choisie
parmi [o
10
, o
12
, o
20
]. Soit o
10
cette vitesse, nous aurons :
20 10
1 2 1 12
1 1
(r r ) r 0
o o ( ( (
=
( ( (
+ o
Ce que nous amne la relation entre-sortie cinmatique dun engrenage simple
1
20 10
2
r
r
o = o
En rsum, Dans le systme cinmatique :
le degr dindtermination est le degr de mobilit ;
une quation secondaire correspond une hyperstaticit.
II.2.4 Hyperstatisme au sens cinmatique :
La rotation autour de j
du solide 2 par rapport au solide 1a t bloque deux fois. La
premire fois par les deux liaisons pivot 1/0 et 2/0. La deuxime fois par le contact linaire
rectiligne de 2/1. Le premier blocage a empch de ramener une dent de (1) en contact
linaire avec une autre de (2), moins que les positions des dents par rapport leurs axes de
rotations aient t assures sans aucune erreur de fabrication.
En pratique, le montage dun mcanisme hyperstatique nest pas indpendant des
erreurs de fabrication. Cest ce quon appelle hyperstatisme au sens cinmatique. En effet,
pour pouvoir concider les flans de deux dents, il faut avoir une libert en rotation autour de j
n
j
x
y
j
Figure 13 : Engrenage cylindrique avec contact linaire entre les dents
Thorie des mcanismes 12
dun de deux solides par rapport lautre. Puisque cette libert est limine, le contact
linaire ne peut se raliser que si chaque dent se trouve au bon endroit . Ce qui implique
des tolrances gomtriques dorientation sur les deux solides et sur le bti.
Dune faon gnrale, une chane ne peut se fermer les
erreurs de fabrication, que si le dernier solide p possde 6 d.d.l.
par rapport au premier. Sinon lassemblage ne peut avoir lieu
que si les positions relatives de certaines surfaces de contact
seront exactes. Ce qui correspond donc des lments
gomtriques conditionns se traduisant sur le dessin
densemble par une condition fonctionnelle qui peut tre soit :
- un jeu fonctionnel pour un arrt surabondant en
translation (force hyperstatique)
- une tolrance dorientation pour un arrt surabondant
en rotation (moment hyperstatique)
II.3 Mthode rapide de formation du systme statique :
II.3.1 Cas 1 : Rducteur picyclodal plan un seul satellite et une
couronne mobile :
X
Y
2
1
3
O
4
O
2
A
B
4
O
1
(0)
C
1 C
2
0
1
3
4
2
Figure 16 : Rducteur picyclodal plan un seul satellite et couronne mobile
Figure 14 : tolrances gomtriques sur les diffrentes pices de lengrenage cylindrique
p 1
Figure 15 : fermeture dune chane
Thorie des mcanismes 13
1
1 4 2
l
O O r
0
| |
|
|
|
\ .
2
1 2
l
O O 0
0
| |
|
|
|
\ .
1
1 1
l
O A r
0
| |
|
|
|
\ .
1
1 3
l
O B r
0
| |
|
|
|
\ .
3
2 1
l
O A r
0
| |
|
|
|
\ .
3
2 4 2
l
O O r
0
| |
|
|
|
\ .
II.3.1.1 Actions extrieurs :
1 2 3
ext 1 ext 2 ext 3
0 C 0 C 0 C
0 0 0 0 0 0
0 0 0 0 0 0
= = =
` ` `
) ) )
II.3.1.2 Actions de liaisons
* liaison pivot de 1 avec 0 en O
1
:
01
0 1 01 01
01 01
O
1
X 0
Y M
Z N
=
`
)
* liaison pivot de 4 avec 2 en O
4
:
24
2 4 24 24
24 24
O
4
X 0
Y M
Z N
=
`
)
* liaison pivot de 2 avec 3 en O
2
:
32
3 2 32 32
32 32
O
2
X 0
Y M
Z N
=
`
)
* liaison pivot de 3 avec 0 en O
2
:
03
0 3 03 03
03 03
O
2
X 0
Y M
Z N
=
`
)
* liaisons appui ponctuel de 1 avec 4 et de 3 avec 4 en O
1
:
3 4 34
34
B
0 0
S Z 0
C Z 0
= o
`
o
)
1 4 14
14
A
0 0
S Z 0
C Z 0
= o
`
o
)
II.3.1.3 Sous matrice associe au torseur des actions :
o
Z34
Z14
Y
Z
Figure 17 : Efforts de contact roues du
Train picyclodal plan
Thorie des mcanismes 14
Chaque torseur sera reprsent par une sous-matrice ayant 6 lignes et n colonnes avec n =
nombre des inconnues. Dune faon gnrale le torseur
ij ij
ij ij ij
ij ij
0
X L
Y M
Z N
=
`
)
scrit sous forme
matricielle
1 0 0 0 0 0 1 0 0 0 0 0
0 1 0 0 0 0 0 1 0 0 0 0
0 0 1 0 0 0 0 0 1 0 0 0
0 0 0 1 0 0 0 0 0 1 0 0
0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 1
ij ij ij ij ij ij ij
X Y Z L M N
( ( ( ( ( (
( ( ( ( ( (
( ( ( ( ( (
( ( ( ( ( (
= + + + + + =
( ( ( ( ( (
( ( ( ( ( (
( ( ( ( ( (
( ( ( ( ( (
{ }
1 0
0 0 0 0 0 1
ij
ij
ij
ij ij
ij
ij
ij
X
Y
Z
T F
L
M
N
(
(
(
(
(
(
(
(
(
(
=
(
(
(
(
(
(
(
(
(
Dans une base canonique la matrice associe au torseur T
ij
est gale la matrice identit.
Lorsque ce torseur est crit en un point O
1
tel que
1
a
OO b
c
| |
|
|
|
\ .
et dans une autre base (
( )
X , Y , Z ' ' '
/
11 12 13
21 22 23
31 32 33
X a a a X
Y a a a Y
Z a a a Z
( ( '
(
( (
(
' =
( (
(
( (
( '
alors la matrice T
ij
aura pour forme
11 12 13
21 22 23
31 32 33
ij
21 31 22 32 23 33 11 12 13
31 11 32 12 33 13 21 22 23
11 21 12 22 13 23 31 32 33
a a a 0 0 0
a a a 0 0 0
a a a 0 0 0
T
a c a b a c a b a c a b a a a
a a a c a a a c a a a c a a a
a b a c a b a c a b a c a a a
(
(
(
(
=
(
(
(
(
(
II.3.1.4 Formation du systme linaire :
Equilibre du solide 1 en O
1
:
0 1 1 4 ext 1
=
Equilibre du solide 2 en O
2
:
3 2 2 4 ext 2
=
Equilibre du solide 3 en O
2
:
3 4 0 3 3 2 ext 3
=
Equilibre du solide 4 en O
4
:
1 4 3 4 2 4 ext 4
+ + =
Les 6 quations dquilibre dun solide seront obtenues par un assemblage des matrices des
torseurs de liaisons appliques ce solide. On aura le systme suivant :
Thorie des mcanismes 15
01 32 03 24 14 34
01
01 14 32 1
32 24 03 2
32 03 34 24 3
24 14 34 14 4
34
0 0 0 0 1
0 0 0 0 2
0 0 0 3
0 0 0 4
F
T T F F ( )
T T F F ( )
T T T F F ( )
T T T F F ( )
F
(
(
( (
(
( (
(
( (
=
(
( (
(
( (
(
(
(
Sous forme dtaille on aura
1
1
1
2
3
2
(1) 1 0 0 0 0 0
(2) 0 1 0 0 0 S
(3) 0 0 1 0 0 C
(4) 0 0 0 0 0 r C
(5) 0 0 0 1 0 l C
(6) 0 0 0 0 1 l S
(7) 1 0 0 0 0 1 0 0 0 0
(8) 0 1 0 0 0 0 1 0 0 0
(9) 0 0 1 0 0 0 0 1 0 0
(10) 0 0 0 0 0 0 0 r 0 0
(11) 0 0 0 1 0 0 0 l 1 0
(12) 0 0 0 0 1 r
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
(24)
o
o
o
o
o
3
3
3
3
4 4
l 0 0 1
1 0 0 0 0 1 0 0 0 0 0
0 1 0 0 0 0 1 0 0 0 S
0 0 1 0 0 0 0 1 0 0 C
0 0 0 0 0 0 0 0 0 0 r C
0 0 0 1 0 0 0 0 1 0 l C
0 0 0 0 1 0 0 0 0 1 l S
1 0 0 0 0 0 0
0 1 0 0 0 S S
0 0 1 0 0 C C
0 0 0 0 0 r C r C
0 0 0 1 0 0 0
0 0 0 0 1 0 0
(
(
(
(
(
(
(
(
(
(
(
o o
o o
o o
01
01
01
1
01
01
32
32
32
32
2
32
03
03
03
03
03
3
24
24
24
24
24
14
34
0
X
0
Y
0
Z
C
M
0
N
0
X
0
Y
0
Z
0
M
C
N
0
X
0
Y
0
Z
0
M
0
N
C
X
0
Y
0
Z
0
M
0
N
0
Z
0
Z
0
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
= (
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
( (
(
(
((
(
0
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
( (
(
II.3.1.5 Interprtations et rsultats :
* Premier niveau dlimination :
Inconnues limines X
01
, X
24
, Z
24
, M
24
, N
24
, Z
14
et Z
34
.
Equations secondaires (21) et (22) 2 mobilits dtectes ncessitant deux vitesses
gnralises choisir parmi : rotation du plantaire (1) autour de X
(quation 4),
rotation du bras porte satellite (2) autour de X
(quation 10), rotation de la couronne
(3) autour de X
(quation 16), rotation du satellite (4) autour de X
(quation 21) et
translation du satellite (4) suivant Z
(quation 22).
* Deuxime niveau dlimination :
Inconnues limines : Y
01
, Z
01
, M
01
, N
01
, X
32
, Z
32
, M
32
etY
25
01
32
03
25
14
34
1
2
3
4
Thorie des mcanismes 16
Equations secondaires : aucune.
* Troisime niveau dlimination :
Inconnues limines : Y
32
, N
32
, X
03
, Y
03
, Z
03
, M
03
et N
03
Equations secondaires : aucune.
* Rsultat :
Toutes les inconnues de liaisons sont calculables mcanisme isostatique
2 quations secondaires mcanisme deux mobilits.
II.3.2 Cas 2 : train un seul satellite avec couronne fixe :
Dans ce cas le solide 3 est confondu avec le bti 0 et la liaison
03
est devenue encastrement.
Le nouveau systme est obtenu partir du prcdent en liminant les colonnes relatives
03
et les 6 lignes relatives lquilibre du solide 3. Les rsultats obtenus sont :
Le mcanisme reste isostatique.
Une seule mobilit : une seule vitesse gnralise choisir parmi la rotation du plantaire
autour de X
et la rotation du bras porte satellite (2) autour de X
.
II.3.3 Cas 3 : train deux satellites avec couronne fixe :
X
Y
2
1
(3,0)
O
4
O
2
A
B
4
O
1
C
1 C
2
0,3
1
4
2
Figure 18 : Rducteur picyclodal plan un seul satellite et couronne fixe
Thorie des mcanismes 17
3
2 5 2 5 5 5 5
l 0 0
O O r O C r O D r
0 0 0
| | | | | |
| | |
| | |
| | |
\ . \ . \ .
Trois liaisons sont ajoutes par rapport au cas prcdent :
- liaison pivot de 5 avec 2 en O
5
:
25
2 5 25 25
25 25
O
5
X 0
Y M
Z N
=
`
)
- liaison appui ponctuel de 1 avec 5
1 5 15
15
C
0 0
S Z 0
C Z 0
= o
`
o
)
- liaison appui ponctuel de 3 avec 5 en D :
3 5 35
35
D
0 0
S Z 0
C Z 0
= o
`
o
)
Par rapport au premier cas les quations dquilibre du solide 3 sont remplaces par celles du
solide 5.
Equilibre de (5) :
1 5 2 5 3 5
{0}
+ + =
On obtient le systme statique suivant :
X
Y
2
1
(3,0)
O
4
O
2
A
B
4
O
1
C
1 C
2
0,3
1
5
4
2
O
5
C
D
5
Figure 19 : Rducteur picyclodal plan deux satellites et couronne fixe
Y
Z
Z15
Z35
Figure 20: Efforts sur le deuxime
satellite
Thorie des mcanismes 18
1 1
1 1
1 1
(1) 1 0 0 0 0 0 0
(2) 0 1 0 0 0 S S
(3) 0 0 1 0 0 C C
(4) 0 0 0 0 0 r C r C
(5) 0 0 0 1 0 l C l C
(6) 0 0 0 0 1 l S l S
(7) 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0
(8) 0 1 0 0 0 0 1 0 0 0 0 1 0 0 0
(9) 0 0 1 0 0 0 0 1
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
(24)
o o
o o
o o
o o
o o
2 2
3 3
2 3 2 3
4 4
5 5
0 0 0 0 1 0 0
0 0 0 0 0 0 0 r 0 0 0 0 r 0 0
0 0 0 1 0 0 0 l 1 0 0 0 l 1 0
0 0 0 0 1 r l 0 0 1 r l 0 0 1
1 0 0 0 0 0 0
0 1 0 0 0 S S
0 0 1 0 0 C C
0 0 0 0 0 r C r C
0 0 0 1 0 0 0
0 0 0 0 1 0 0
1 0 0 0 0 0 0
0 1 0 0 0 S S
0 0 1 0 0 C C
0 0 0 0 0 r C r C
0 0 0 1 0 0 0
0 0 0 0 1 0 0
o o
o o
o o
o o
o o
o o
01
01
01
01
01
23
23
23
23
23
24
24
24
24
24
25
25
25
25
25
14
34
15
35
X
Y
Z
M
N
X
Y
Z
M
N
X
Y
Z
M
N
X
Y
Z
M
N
Z
Z
Z
Z
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
(
(
(
(
(
(
(
(
(
(
(
(
(
( (
(
1
2
0
0
0
C
0
0
0
0
0
C
0
0
0
0
0
0
0
0
0
0
0
0
0
0
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
=
(
(
(
(
(
( (
( (
( (
( (
(
(
( (
( (
(
(
( (
( (
(
(
( (
( (
( ( ( (
( (
Nous obtenons un systme de 24 quations et de 24 inconnues.
Le premier et le deuxime niveaux dlimination dgagent les inconnues suivantes : X
01
, X
24
,
M
24
, N
24
, X
25
, M
25
, N
25
et X
23
. Aucune quation secondaire nest dtecte. IL nous reste
rsoudre le sous-systme suivant :
1 1
1 1
1 1
2 2
3 3
3 3
4 4
1 0 0 0 S S (2)
0 1 0 0 C C (3)
0 0 0 0 r C r C (4)
0 0 1 0 l C l C (5)
0 0 0 1 l S l S (6)
1 0 0 0 1 0 1 0 (8)
0 1 0 0 0 1 0 1 (9)
0 0 0 0 0 r 0 r (10)
0 0 1 0 0 l 0 l (11)
0 0 0 1 l 0 l 0 (12)
1 0 0 0 S S (14)
0 1 0 0 C C (15)
0 0 0 0 r C r C (16)
0 0 (20)
(21)
(22)
o o
o o
o o
o o
o o
o o
o o
o o
01
01
01 1
01
23
23
23
23 2
24
24
25
25
14
34
15
35 5 5
Y 0
Z 0
M
C
N 0
Y 0
Z
0
M 0
N C
Y
Z
Y
Z
Z
Z 1 0 S S
Z 0 0 0 1 C C
Z 0 0 0 0 r C r C
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( (
( = (
( (
( (
( (
( (
( (
( (
( (
( (
o o ( (
( (
o o
( (
( o o ( ( (
(
0
0
0
0
0
0
0
0
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
( (
Ce sous systme est compos de 16 quations et 16 inconnues. Si toutes les quations sont
principales, les 16 inconnues seront calculables et le mcanisme sera isostatique. Sinon, il
yaura autant des inconnues hyperstatiques que des quations secondaires. Pour vrifier cela,
on va procder llimination des quations qui sont obligatoirement principales. Chacune de
ces quations doit contenir exclusivement une inconnue. Dans ce cas le coefficient relatif
cette inconnue sera le seul dans sa colonne. On limine la fois la colonne et la ligne
1
2
4
5
01
23
24
25
14
34
15
35
Thorie des mcanismes 19
contenants le coefficient. Les quations limines seront (2), (3), (5), (6), (8), (9), (11), (12). Il
nous reste le sous systme suivant
1 1 24 1
2 2 25 2
14
4 4 34
15
5 5 35
0 0 r C 0 r C 0 Z (4) C
r r 0 0 0 0 Z (10) C
1 0 C C 0 0 Z (15) 0
0 0 r C r C 0 0 Z (16) 0
0 1 0 0 C C Z (21) 0
0 0 0 0 r C r C Z (22) 0
o o ( ( (
( ( (
( ( (
( ( (
o o
= ( ( (
o o
( ( (
( ( (
o o
( ( (
o o ( ( (
La donne de nimporte quelle inconnue parmi les 6 amne au calcul des autres avec chaque
fois une quation secondaire obtenue. Do les rsultats suivants :
Un hyperstatisme de degr 1, linconnue hyperstatique est choisir parmi Z
24
, Z
25
, Z
14
,
Z
34
, Z
15
et Z
35
Une seule mobilit. La vitesse gnralise est choisir parmi : la rotation autour de X
du
plantaire (1) ou du bras porte satellites (2) ou du satellite (4) ou du satellite (5).
Cette mobilit est exprime par la relation
2
2 1
1
2r
C C
r
= obtenue partir de la nullit du
dterminant du sous systme prcdent en remplaant une des colonnes par le second
membre.
1 1 1
2 2 2
3 2
4 5 2 1 1 2 2 1
4 4 1
5
0 0 r C 0 r C C
r r 0 0 0 C
1 0 C C 0 0
2r
r r C ( 2r C r C ) 0 C C
0 0 r C r C 0 0 r
0 0 0 0 C 0
0 0 0 0 r C 0
o o
o o
= o + = =
o o
o
o
Cette relation entre les deux couples dentre et de sortie est
bien celle trs connue pour un train picyclodal lorsque le
frottement nest pas considr.
2 1
1
C C
k
= avec k : raison du
train gal
1 1
1 3 2
r r
k
r r 2r
= =
+
car r
3
= r
2
+r
4
et r
1
= r
2
r
4
.
III. Loi de mobilit globale :
Lquilibre statique dun mcanisme de p pices et liaisons amne un systme de 6p
quations et
i
inconnues.
i
tant le degr de liaison dans la liaison i,
i
= 6 ddl(i).
r
3
r
4
r
2
r
1
Figure 21: rayons des roues
Thorie des mcanismes 20
Parmi les 6 quations on distingue (6pm) quations principales pour rsoudre les
i
inconnues. Le degr dhyperstatisme h tant alors gal h =
i
6p + m. On obtient
6p
i
= m h
Cette relation nomme loi de mobilit globale exprime la dualit entre le degr de
mobilit m et le degr dhyperstaticit h. Nous pouvons retrouver galement cette relation
partir du systme cinmatique.
Dans ltude cinmatique nous avons 6 (p) quations pour calculer d.d.l
inconnues
cinmatiques.
i
d.d.l (6 ) =
Parmi les 6 (p) quations nous distinguons h quations secondaires. Le nombre des vitesses
gnralises donner pour rsoudre le systme sera
i
m (6 ) 6( p) h = +
. Nous
retrouvons de nouveau 6p
i
= m h
IV. Analyse numrique des mcanismes :
IV.1 Analyse cinmatique :
Pour un mcanisme de p pices et liaisons nous pouvons crire ( p) quations de
fermeture des cycles indpendants. Nous obtenons ainsi le systme linaire homogne
suivant :
[E]. {V} = {0} (1)
o
{V} : vecteur des inconnues cinmatiques de dimension Ic (Ic : somme des degrs de liberts
de liaisons)
[E] : matrice rectangulaire de dimensions (6( p) Ic).
La triangularisation du systme par la mthode de pivot total de Gauss nous donne
[E
1
] {V
1
} + [E
2
] {W} = {0} (2)
avec
6(-p)
E
1
E
2
O
V
1
W
0
h
Ic
m
=
Thorie des mcanismes 21
[E
1
] matrice carre triangulaire suprieure dordre r ; r : rang de [E] ;
[E
2
] matrice rectangulaire de dimension (r x m) ; m : degr de mobilit du mcanisme ;
{V
1
} vecteur de dimension r des inconnues cinmatiques principales ;
{W} vecteur de dimension m des vitesses gnralises.
La relation entre {V
1
} et {W} scrit
{V
1
} = -[E
1
]
-1
[E
2
] {W}= [E
3
] {W} (3)
Ce systme ne peut tre dtermin que si les m vitesses du vecteur {W} seront donnes.
Cependant, on peut distinguer parmi les inconnues de {V
1
}, ceux qui ne dpendent pas de ces
donnes et qui sont donc nulles. Elles reprsentent les liberts des liaisons rendues arrtes
par leffet des autres liaisons du mcanisme. Le systme prcdent peut tre crit dans ce cas
{V
1
} =
(
=
)
`
'
3
'
1
E
0
V
0
{W} (4)
[E'
3
] : partie non nulle de [E
3
].
Le systme qui reste rsoudre est
{
'
1
V } = [
'
3
E ] {W} (5)
La matrice [E
3
] est la matrice des coefficients des inconnues cinmatiques non
obligatoirement nulles dans la base de lespace des vitesses gnralises. Chacune de ces m
colonnes dcrit linfluence dune vitesse gnralise sur les liberts non bloques des
liaisons. Pour cette raison [E
3
] est dite matrice de distribution des mobilits.
A partir de ce systme une vitesse v
1i
de {
'
1
V } scrit
m
1i ij j
j 1
v e w
=
' =
. Lorsque le coefficient
e
ij
de [E
3
] est nul,
1i
v' est indpendante de w
j
. Dans le cas contraire la valeur de e
ij
peut
informer sur limportance de linfluence de wj sur v
1i
.
Nous pouvons toujours organiser le systme (5) de faon faire apparatre les vitesses
appartenant une mme liaison dans un mme bloc. De cette faon nous pouvons voir quelles
liaisons et par suite quels cycles seront concerns par une mobilit.
IV.1.1 Choix des vitesses gnralises :
Nous savons bien que la composition de {W} nest pas unique et quil existe des vitesses de {
'
1
V } qui peuvent tre des vitesses gnralises. Si nous choisissons arbitrairement m quations
du systme (5) nous obtenons le sous-systme
{V
1
}= [E
3
] {W} (6)
o [E
3
] est une matrice carre de dimension m. Nous ne pouvons crire
{W}= [E
3
]
-1
{V} (7)
que si le dterminant de [E
3
] est non nul. Dans ce cas le systme (5) devient
{
'
1
V } = [
'
3
E ] [E
3
]
-1
{V
1
} (8)
et les composants de {V
1
} deviennent les nouvelles vitesses gnralises. Nous pouvons donc
citer la rgle suivante concernant le choix des vitesses gnralises :
Pour que m vitesses de {
'
1
V }soient des vitesses gnralises il faut que leurs coefficients
dans [E
3
] forment un dterminant non nul.
Thorie des mcanismes 22
Cette rgle reste valable mme si nous remplaons moins que m vitesses dans {W}. En effet,
nous pouvons toujours crire
{ }
1 3
V' E'
W
W I
(
=
`
(
)
(9)
Et ainsi nous appliquons la mme procdure quauparavant. Cependant il va apparatre dans le
dterminant vrifier des lignes de la sous-matrice identit qui correspondent aux vitesses
non remplaces dans {W}. Nous savons que dt
I 0
A A'
| |
|
\ .
= dt (A) et de ce fait le calcul
du dterminant mm sera rduit un calcul de dterminant des coefficients des nouvelles
vitesses par rapport aux vitesses remplaces.
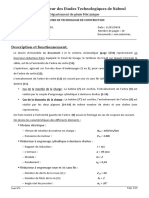
IV.1.2 Application : Mcanisme dessuie - glaces :
Nous allons appliquer cette mthode danalyse sur le mcanisme dessuie-glace reprsent ci-
dessous. Les 9 liaisons du mcanisme sont dcrites dans le tableau suivant.
Liaison Type Pices Position repre local
(R
local
)
Torseur cinmatique /R
local
1
pivot
0-1
|
|
.
|
\
|
0
0
0
(
1 0 0
0 1 0
0 0 1
{ } { } 0 , 0 , 0 , 0 , 0 ,
10
T
0 / 1
o = 0
2
Appui ponctuel
2-1
|
|
.
|
\
|
4
0
24
(
34 . 0 94 .
0 1 0
94 . 0 34 .
{ } { } 0 , v , u , , ,
21 21 21 21 21
T
1 / 2
| o = 0
3
pivot
0-2
|
|
.
|
\
|
5 . 22
0
24
(
1 0 0
0 0 1
0 1 0
{ } { } 0 , 0 , 0 , 0 , 0 ,
20
T
0 / 2
o = 0
4
pivot
2-3
|
|
.
|
\
|
5 . 28
9
5 . 21
(
1 0 0
0 0 1
0 1 0
{ } { } 0 , 0 , 0 , 0 , 0 ,
32
T
2 / 3
o = 0
5
Appui ponctuel
4-3
|
|
|
.
|
\
|
2 . 51
9
8 . 41
(
(
(
02 . 0 99 .
0 1 0
99 . 0 02 .
{ } { } 0 , v , u , , ,
34 34 34 34 34
T
4 / 3
| o = 0
6
pivot
0-4
|
|
.
|
\
|
25 . 47
9
25 . 43
(
1 0 0
0 0 1
0 1 0
{ } { } 0 , 0 , 0 , 0 , 0 ,
40
T
0 / 4
o = 0
7
pivot
4-5
|
|
.
|
\
|
2 . 47
17
2 . 43
(
1 0 0
0 0 1
0 1 0
{ } { } 0 , 0 , 0 , 0 , 0 ,
54
T
4 / 5
o = 0
8
pivot
5-6
|
|
.
|
\
|
34
9
2 . 48
(
1 0 0
0 0 1
0 1 0
{ } { } 0 , 0 , 0 , 0 , 0 ,
65
T
5 / 6
o = 0
9
Appui ponctuel
3-6
|
|
.
|
\
|
7 . 37
9
40
(
(
(
94 . 0 34 .
0 1 0
34 . 0 94 .
{ } { } 0 , v , u , , ,
63 63 63 63 63
T
3 / 6
| o = 0
La liaison
5
entre le pignon 4 et la crmaillre 3 a t considre dans une premire
approximation comme un appui ponctuel. Vu que nous adoptons lhypothse des liaisons
parfaites, le frottement est nglig ; de ce fait le systme roue et vis sans fin est rversible.
Thorie des mcanismes 23
Lanalyse cinmatique du mcanisme selon le processus dcrit prcdemment nous donne les
rsultats suivants :
Degr de mobilit : 3
Degr dhyprestaticit : 0
Vitesses nulles :
- Liaison
5 :
o
34
-
34
-
v
34
- Liaison
9
: o
63
-
63
- v
63
Le systme (5) relatif cet exemple est :
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
34
63
21
63
65
54
40
34
32
20
21
21
21
21
10
302 . 0 002 . 0 0075 . 0
115 . 0 069 . 0 00005 . 0
431 . 0 071 . 0 019 . 0
316 . 0 0 0137 . 0
244 . 0 0 012 . 0
071 . 0 0 003 . 0
0 0 005 . 0
0 0 032 . 0
0 0 232 . 0
0 0 025 . 0
0 0 085 . 0
0 0 242 . 0
u
u
v
u
|
o
o
o
|
o
o
|
o
o
X
Y
Z
y
21
x
21
y
20
z
20
x
20
y
63
x
63
y
34
5
x34
5
(0)
1
2
3
6
4
5
1
2 0
3
5
4
6
8
Figure 22 : mcanisme dessuie-glace
Thorie des mcanismes 24
La premire colonne de la matrice [E
3
] reprsente la projection de la vitesse de glissement
suivant y
21
de la roue 2 par rapport la vis sans fin 1. Cette vitesse constitue le paramtre
dentre utile du mcanisme. Tous les coefficients de la premire colonne sont non nuls ce
que veut dire que v
21
met en mouvement toutes les liaisons.
La vitesse u
63
est la vitesse de glissement du galet 6 sur la crmaillre 3 suivant x
63
. Cette
vitesse a influence faible sur les liberts des liaisons du cycle 3-4-5-6-3 suivantes :
o
54
: rotation autour de x
54
de 5/4
o
65
: rotation autour de x
65
de 6/5
|
63
: rotation autour de y
63
de 6/3
Ce paramtre traduit la possibilit de glissement du galet 6 par rapport la crmaillre 3 en
arrt du systme.
La vitesse u
34
, vitesse de glissement de la crmaillre 3 par rapport la roue 4 suivant x
34
qui
traduit la possibilit de soulvement de la crmaillre par rapport la roue rendu possible
grce la liaison pivot de 3/2. Cette vitesse na aucune influence sur les vitesses des liaisons
du cycle 0-1-2-0.
En ce qui concerne le choix des vitesses gnralises, il est clair que les vitesses o
10
, o
21
et |
21
ne peuvent pas former un jeu de vitesses gnralises car le dterminant des trois premires
lignes de [E
3
] est nul. Mais nous pouvons par exemple remplacer v
21
dans {W} car le
0
1 0 0
0 1 0
0 0 242 . 0
dt =
.
Les vitesses o
10
, u
63
et u
34
constituent bien un jeu de vitesses gnralises.
IV.2 Analyse Statique :
Pour un mcanisme de p pices, lquilibre statique fournit un systme linaire de 6p
quations de la forme
[A] { X} = {B} (10)
[A] : matrice de configuration gomtrique
{X} : matrice colonne des inconnues de liaisons (actions intrieures de contact)
{B} : matrice colonne des efforts extrieurs appliqus sur le mcanisme.
IV.2.1 triangularisation du systme linaire :
Le systme obtenu peut se mettre aprs une triangularisation par la mthode de pivot total de
Gauss sous la forme suivante :
[T ]{Y} + [K] {Z} = [C] {B} (11)
et [D] {B} = 0 (12)
6p
T
K
O
Y
Z
D
C
B
m
Is
h
6p
=
Thorie des mcanismes 25
Ainsi on aboutit dune faon gnrale :
- h inconnues hyperstatiques regroupes dans un vecteur Z;
- r inconnues isostatiques ou principales regroupes dans un vecteur Y;
- (6p - r) = m quations non principales.
La matrice T est triangulaire suprieure, de dimensions (6p m) x (Is h).
IV.2.2 Relations entre-sortie gnrales :
Lquation matricielle (12), comporte m relations entre les efforts extrieurs appliqus sur le
mcanisme. Ces m relations sont les relations entre-sortie statiques que le mcanisme gnre.
Si nous supposons que sur chaque pice sexerce un torseur des efforts extrieurs dfini par
{ }
ext i
Fi / X Ci / X
Fi / Y Ci / Y
Fi / Z Ci / Z
=
`
)
Nous obtenons des relations entre-sortie les plus gnrales qui nous renseignerons sur les
ventuelles possibilits des relations entre les efforts extrieurs susceptibles dtre appliqus
sur les diffrentes pices.
Exemple :
Pour le mcanisme de pompe manuelle schmatis ci-dessous, les deux relations entres -
sorties statiques sont :
Relation 1 : 0,05 C2/Z + 0,56 F3/X + F3/Y - 0,01 C3/Z + 0,79 F4/Y = 0.
Relation 2 : - 0,01 C3/Z + 0,79 F4/Y = 0.
La relation 1 montre que, parmi les efforts extrieurs appliqus sur la pice 2, seul un couple
C2/Z peut tre transmis aux deux autres pices. On peut ainsi recevoir un effort F4/Y sur la
2
3
4
1
X
Y
Figure 23 : Pompe manuelle
Thorie des mcanismes 26
pice 4 et / ou F3/X, F3/Y et C3/Z sur la pice 3. Mais en ralit, aucun effort extrieur nest
appliqu sur la pice 3. La relation 1 devient de ce fait 0,05 C2/Z + 0,79 F4/Y = 0. On
retrouve bien, la relation qui caractrise la fonction globale de pompage gnre par le
mcanisme. La relation 2 caractrise la deuxime mobilit qui est une mobilit interne. Elle
relie deux efforts extrieurs appliqus sur la pice (4) uniquement. Ces deux efforts ne
peuvent pas tre transmis aux autres pices.
IV.2.3 Efforts calculables et efforts non calculables :
Les efforts principaux de liaisons sobtiennent en fonction des efforts extrieurs et des efforts
hyperstatiques par lquation matricielle
{Y} =[ T]
-1
[C] {B} -[ T]
-1
[K] {Z} (13)
Parmi ces efforts, on distingue les efforts calculables qui ne dpendent pas de {Z}. Ce sont les
inconnues o les lignes correspondantes de la matrice [T]
-1
[K] sont nulles. On peut toujours
faire une permutation pour regrouper ces inconnues. On aura la configuration suivante :
= -
{Y} sont les efforts isostatiques, ils sont calculs partir de la relation
{Y} = [T] {B} (14)
{Y} est le vecteur des efforts principaux qui dpendent des efforts hyperstatiques regroups
dans le vecteur {Z}. Ils sont calculs partir de la relation
{Y} = [ T] {B} - [K] {Z} (15)
Nota : dim(Y) = r et dim(Y) = r ; r = r + r.
La distinction entre les inconnues calculables et les inconnues non calculables est trs
bnfique dans le sens o elle permet, en isolant les hyperstaticits, dobtenir quelques
rsultats du calcul statique. Ces rsultats sont parfois suffisants pour pouvoir entamer un
calcul de dimensionnement. Dune faon gnrale, lexistence des hyperstaticits dans un
mcanisme ne doit pas empcher de traiter ses parties isostatiques, surtout quand les
hyperstaticits ne concernent quune partie des cycles.
IV.2.4 Distribution et choix des efforts hyperstatiques :
En absence des efforts extrieurs la relation (15) devient
{Y} = [ K
] {Z} (16)
Y
Y
T
T
B
0
K
Z
r
6p h
= -
Thorie des mcanismes 27
Nous obtenons une relation semblable la relation (5) qui distribue les vitesses gnralises.
Nous allons, alors, appliquer les mmes rgles pour la distribution des hyperstaticits et pour
le choix des inconnues hyperstatiques.
Chaque colonne de la matrice [K
] exprime la distribution dun effort hyperstatique sur les
diffrentes liaisons. Lorsque le coefficient k
ij
est nul leffort
i
Y'' nest pas concern par
lhyperstaticit j.
i
Y'' ne peut pas dans ce cas remplacer leffort hyperstatique
j
Z .
Pour que n inconnues de {Y} (2 s n > h) remplacent n effort hyperstatiques il faut que leurs
coefficients dans [K
] forment un dterminant non nul.
IV.2.5 Application : mcanisme 4 barres :
Les liaisons de ce mcanisme sont dfinies dans le tableau suivant :
Liaison Type Pices Position
repre local
(R
local
)
Torseur des actions de liaison /R
local
1
pivot
0-1
0
0
0
| |
|
|
|
\ .
0 0 1
0 1 0
1 0 0
(
(
(
(
{ }
01
0 1 01 01
01 01
X 0
Y M
Z N
=
`
)
2
pivot
1-2
25
43.3
0
| |
|
|
|
\ .
0 0 1
0 1 0
1 0 0
(
(
(
(
{ }
12
1 2 12 12
12 12
X 0
Y M
Z N
=
`
)
3
pivot
2-3
183.03
90.76
0
| |
|
|
|
\ .
0 0 1
0 1 0
1 0 0
(
(
(
(
{ }
23
2 3 23 23
23 23
X 0
Y M
Z N
=
`
)
4
pivot
0-3
225
0
0
| |
|
|
|
\ .
0 0 1
0 1 0
1 0 0
(
(
(
(
{ }
03
0 3 03 03
03 03
X 0
Y M
Z N
=
`
)
Les rsultats de lanalyse statique sont :
Degr de mobilit : 1
Relation entre-sortie statique gnrale :
(0)
1
2
3
Figure 24 : Mcanisme 4 barres
Z
Y
Thorie des mcanismes 28
0.12 C1/X + 0.69 F2/Y 0.4 F2/Z + 0.003 C2/X + F3/Z 0.004 C3/X = 0
Degr d'Hyperstaticit : 3
Inconnues calculables :
*Liaison n 1: Z
01
, Y
01
*Liaison n 2: Z
12
, Y
12
*Liaison n 3: Y
23
, Z
23
*Liaison n 4: Y
03
, Z
03
Distribution des hyperstaticits :
01
12
12
01 12
01 23
03 23
23
03
03
X 0.004 0 0.004
X 0.004 0 0.004
M 0.192 1 0.192
N N 0.88 0 0.11
M X 0.004 0 0.004
N M 0.403 1 0.403
N 0.186 0 0.81
X 0.004 0 0.004
M 0 1 0
( (
( (
( (
( (
( (
( (
( (
=
( (
( (
( (
( (
( (
( (
( (
(
(
(
(
Les 3 hyperstaticits ne concernent que les forces suivant X
et les moments suivant Y
et Z
dans les 4 liaisons. Le mcanisme dans le plan ( X
, Y
) est donc isostatique.
La troisime hyperstaticit (troisime colonne de la matrice [K
]) ne concerne que les
moments suivant Z
.
En ce qui concerne le choix des efforts hyperstatiques, X
01
, M
01
et N
01
par exemple forme une
constitution valide du vecteur {Z}.
IV.3 Recherche systmatique des solutions isostatiques :
Dans ce paragraphe nous prsenterons deux mthodes pour une recherche
systmatique de solutions isostatiques. La premire consiste llimination directe des efforts
hyperstatiques de leurs liaisons. Il sagit dune modification de type de liaisons contenant les
efforts hyperstatiques tout en gardant le mme nombre de pices et le mme nombre de
liaisons. La seconde consiste lajout de nouvelles liberts susceptibles de destituer les efforts
hyperstatiques. Des nouvelles pices sont alors insres dans le mcanisme. La solution issue
de chaque mthode nest retenue que si toutes les liaisons modifies ou ajoutes sont
conformes la norme ISO 3952.
IV.3.1 Obtention des solutions isostatiques par limination directe des efforts
hyperstatiques :
Cette mthode consiste retrancher les efforts hyperstatiques de leurs liaisons. Les
degrs de libert de ces dernires vont augmenter en dpit des degrs de liaisons. Cette
opration amne lannulation du vecteur {Z} des efforts hyperstatiques.
IV.3.1.1 Conditions dobtention dune solution globale :
Thorie des mcanismes 29
Toute liaison contenant des efforts hyperstatiques se voit modifie pour obtenir une
nouvelle liaison qui contient moins de contacts. Pour les h efforts dun jeu {Z} nous avons
modifier liaisons (h). La solution nest retenue que si toutes les liaisons modifies sont
conformes la norme ISO 3952. Deux cas particuliers de liaisons sont intouchables par cette
modification. La liaison ponctuelle, qui si en liminant le seul effort quelle gnre nous
ramperons compltement le contact entre les deux solides concerns. La deuxime liaison est
la liaison hlicodale qui a une fonction cinmatique de transformation de mouvement et
quon perdra si nous touchons un de ces contacts.
Les nouvelles liaisons issues, suivant ces conditions, des liaisons initiales sont prsentes dans
le tableau ci-dessous. Elles ne dpendent pas uniquement du nombre dinconnues retranches
mais aussi de leurs types et de leurs directions.
Liaison initiale
Nombre dinconnues
retrancher
Nouvelle liaison
Forces Moments
Linaire rectiligne 1 Ponctuelle
Linaire annulaire 1 Ponctuelle
Sphrique
1 Linaire annulaire
2 Ponctuelle
Appui plan
1 Linaire rectiligne
1 1 Ponctuelle
Pivot glissant
1 2 Ponctuelle
2 Linaire annulaire
1 1 Linaire rectiligne
Pivot
2 1 Linaire rectiligne
1 2 Linaire annulaire
2 Sphrique
2 Appui plan
1 Sphrique doigt
1 Pivot glissant
2 2 Ponctuelle
Glissire
1 2 Linaire rectiligne
3 Linaire annulaire
1 1 Appui plan
1 Pivot glissant
Sphrique doigt
2 1 Ponctuelle
1 1 Linaire annulaire
2 Linaire rectiligne
1 Sphrique
IV.3.1.2 Exemples :
a) Engrenage cylindrique denture droite :
Linconnu hyperstatique est un parmi M
01
, N
01
, M
12
, N
12
, M
02
,
N
02
.
X
Y
2
1
A
B
O
Figure 25 : Eng. cylindrique
isostatique 1
Thorie des mcanismes 30
Si nous choisissons M
01
le torseur de la liaison
01
devient aprs limination de leffort
hyperstatique
01
0 1 01
01 01
O
X 0
Y 0
Z N
=
`
)
. Ce torseur correspond une liaison sphrique doigt
de direction z
(le blocage en rotation est suivant z
).
Si nous choisissons N
01
01
devient une liaison sphrique
doigt de direction y
de mme pour M
02
et N
02
on aura deux liaisons sphriques
doigt respectivement suivant y
et z
.
Si nous choisissons M
12
le torseur de la liaison
01
devient
0 1 12
12
O
0
R S 0
R C 0
= o
`
o
)
. Ce torseur correspond une liaison appui ponctuel de normale n
.
b) Mcanisme 4 barres :
Pour rendre ce mcanisme isostatique il faut liminer 3 efforts hyperstatiques.
Premier choix : les trois efforts hyperstatiques sont X
01
, M
01
et N
01
le torseur de la liaison
01
devient
0 1 01
01
0 0
Y 0
Z 0
=
`
)
. Ce torseur correspond une liaison linaire annulaire de
direction x
.
deuxime choix : X
01
, M
12
, N
12
Le torseur de la liaison
01
devient
0 1 01 01
01 01
0 0
Y M
Z N
=
`
)
01
devient pivot glissant
daxe x
.
Le torseur de la liaison
12
devient
12
1 2 12
12
X 0
Y 0
Z 0
=
`
)
12
sphrique.
X
Y
2
1
A
B
O
Figure 26 : Eng. cylindrique
Isostatique 2
(0)
1
2
3
Figure 27 : Mcanisme 4 barres avec une linaire annulaire
Z
Y
Thorie des mcanismes 31
Troisime choix : X
23
, M
23
, N
03
Le torseur de la liaison
23
devient
2 3 23
23 23
0 0
Y 0
Z N
=
`
)
Ce torseur ne correspond
aucune liaison standard. La solution est rejete.
IV.3.2 Obtention des solutions isostatiques par ajout des nouvelles liberts :
IV.3.2.1 Compatibilit entre les liberts ajoutes et les efforts
hyperstatiques :
Le principe de cette mthode est de librer le blocage surabondant caus par un effort
hyperstatique par lajout dune libert. Cette libert est ncessairement compatible avec
leffort hyperstatique c'est--dire elle produit une puissance non nulle. Soit
i j
le torseur
des efforts de la liaison
ij
qui comporte
'
ij
h efforts hyperstatiques. Ce torseur scrit sous la
forme suivante :
ij
n
i j k k
k 1
X
=
= ,
ij ij
ij
h n
k k k k
k 1 k h 1
X X
'
' = = +
= , + ,
o les
k
, sont les torseurs gomtriques les X
k
ont les intensits des efforts associs
k
, .
ij
n
est le degr de liaison de la liaison
ij
.
Soit
l l
0 = o le torseur cinmatique dune libert l ajouter entre i et j. Pour que cette libert
limine un effort hyperstatique, il faut que 0 ait un comoment non nul avec la partie
hyperstatique de
i j
cest--dire:
ji ji
h h
k k l l k k l
k 1 k 1
c X , X c( , ) 0
' '
= =
| |
, = o , =
|
|
\ .
O les o
1
et X
k
sont arbitraires. o
1
est compatible avec un des efforts hyperstatiques. Si nous
ajoutons
'
ij
h liberts indpendantes et compatibles avec les
'
ij
h efforts hyperstatiques de la
liaison
ij
elles transformeront ces efforts hyperstatiques en des actionneurs produisant une
(0)
1
2
3
Z
Y
Figure 28 : Mcanisme 4 barres CSRR
Thorie des mcanismes 32
puissance non nulle. Dans le mcanisme, ces
'
ij
h degrs de libert apparaissent sous forme de
nouvelles liaisons interposes entre les solides i et j. Ainsi, il y aura des nouveaux solides
k,k entre i et j tel que la liaison
ik
est la mme liaison quavait i avec j et les nouvelles
liaisons
kk
, seront quivalentes une liaison
kj
de degr de libert gal
'
ij
h .
Notons
'
ij
la nouvelle liaison quivalente entre les solides i et j,
i j
'
le torseur des
actions de liaison, et
ji
' 0 le torseur cinmatique entre i et j. Nous pouvons alors crire que :
i j i k k j
'
=
Or
k j
, du fait de la dualit avec le torseur cinmatique, contient des composantes
suivant toutes les directions sauf suivant les directions des
'
ij
h efforts hyperstatiques. Les
rsultats de lintersection suivant ces directions sont bien nulles. Pour les autres directions, les
rsultats de lintersection vont tre les mmes composantes que dans
i k
. Par consquent,
lajout dune nouvelle liaison
ij
h' d.d.l. comme dcrit ci haut, est quivalent une liaison
quivalente
'
ij
obtenue partir de la liaison
ij
aprs limination des
ij
h' efforts
hyperstatiques.
'
ij
est aussi le rsultat obtenue par llimination directe des efforts
hyperstatiques de la liaison initiale. Nous dduisons que les rsultats de deux mthodes de
recherche des solutions isostatiques sont quivalents.
i j
k
ik
=
ij
kj
(
'
ij
h ddl)
ij
Nouvelle liaison
ajoute entre i et j
Nouveau solide
ajout entre i et j
Figure 29 : Liaison quivalente
ij
Thorie des mcanismes 33
En exploitant cette conclusion, le problme de llimination des hyperstaticits par ajout des
nouvelles liberts devient :
tant donnes la liaison quivalente
'
ij
et lancienne liaison
ik
conformment la
figure ci -dessus, quelle sera la liaison
kj
ajouter tel que '
ij ik kj
= ?
Ainsi, pour rendre le mcanisme isostatique nous allons adopter la procdure suivante :
pour un jeu defforts hyperstatiques, et pour chacune des liaisons impliques dans ce jeu, les
tapes suivre sont :
Dtermination de la nouvelle liaison quivalente
'
ij
obtenue aprs limination des
ij
h' efforts hyperstatiques (1
re
mthode).
Insertion dune nouvelle liaison entre i et j de faon que la liaison quivalente
entre ces solides soit
'
ij
.
IV.3.2.2 Conservation du degr et des natures des mobilits :
La solution isostatique obtenue ne doit pas modifier le comportement du mcanisme, et
par consquent le degr de mobilit initial doit tre conserv. En effet, ce risque est absent car
les liaisons quivalentes obtenues sont les anciennes liaisons desquelles nous avons limin
les efforts hyperstatiques. Autrement dit, nous navons limin que le sous systme [ ] { } K Z
de la relation matricielle obtenu par triangularisation du systme statique, ainsi le degr de
mobilit du mcanisme nest pas affect.
i j
k
i k i j
=
dim
k j
= 6
ij
h'
dim(
i j
' )
= dim(
i k
)
ij
h'
i
j
dim(
i j
' )
= dim(
i j
)
ij
h'
Premire mthode
Deuxime mthode
Figure 30 : Equivalence de deux mthodes de recherche des solutions isostatiques
Thorie des mcanismes 34
Nous pouvons vrifier cela en appliquant la loi de mobilit globale sur le mcanisme
avant et aprs modification. Pour le mcanisme hyperstatique de dpart nous avons :
s
I p m h + = 6
I
s
tant le nombre total des efforts de liaisons et h degr dhyperstaticit global.
Pour le mcanisme rendu isostatique, nous avons ajout p' solides et efforts
hyperstatiques tel que :
'
s k j kj
p ' p '
I dim (6 h ) 6p' h
' = = =
La loi de mobilit prend alors la forme suivante :
6( ') ( 6 ' ) '
s
p p I p h m + + =
En introduisant ce rsultat dans la relation de h nous obtenons que ' m m = . Nous avons ainsi
vrifi que le degr de mobilit initial du mcanisme est conserv aprs modification de ce
dernier.
IV.3.2.3 Mthode pratique de lobtention de la nouvelle liaison :
Nous allons partir du torseur de la liaison quivalente
'
ij
pour rechercher celui de la
nouvelle liaison
kj
insrer en srie avec lancienne liaison
ik
.
Soit lcriture suivante du torseur le plus gnral des efforts de liaison de
'
ij
6
ij
i j n n
n 1
X
=
' = ,
Les
ij
n
X sont les intensits de force ou de moment et qui sont obligatoirement nulles lorsque
le torseur
i j
' nadmet pas de composante suivant
n
, .
Le torseur
i k
scrit galement
6
ik
i k n n
n 1
X
=
= ,
Si nous crivons le torseur des actions de la nouvelle liaison
kj
dans la mme base et au
mme point que celui de
'
ij
nous obtenons:
3
kj kj kj kj kj kj kj kj kj kj
kj n n 4 3 2 4 5 1 3 5 6 2 1 6
n 1
X (X yX zX ) (X z X x X ) (X x X yX )
=
= , + + , + + , + + ,
Ce torseur inconnu va tre dtermin partir de la relation
'
i j i k k j
=
'
s
I
Thorie des mcanismes 35
Il existe une infinit de solutions qui vrifient cette relation. Pour limiter le nombre de
solutions nous allons nous limiter au cas o la liaison
kj
admet la mme base canonique que
ik
et
'
ij
. Dans ce cas nous aurons comme rsultats le lintersection :
- si
kj
n
X = 0 ou
ik
n
X = 0 alors
ij
n
X = 0
- si
kj
n
X = 0 et
ik
n
X =0 alors
ij
n
X = 0
Nous en dduisons pour notre problme o les
ij
n
X et les
ik
n
X sont donnes :
si
ij
n
X = 0 alors
kj
n
X =0
si
ij
n
X = 0 alors
si
ik
n
X = 0 alors
kj
n
X = 0
si
ik
n
X = 0 alors
kj
n
X = 0
Pour les composantes
kj
n
X (n : 4, 5, 6) il faut galement vrifier les conditions suivantes qui
dterminent les coordonnes du point de rduction de la nouvelle liaison :
si
kj
n
X = 0
si
kj
3
X 0 = alors y est quelconque sinon y 0 =
si
kj
2
X 0 = alors z est quelconque sinon z 0 =
si
kj
5
X 0 = alors
si
kj
1
X 0 = alors z est quelconque sinon z 0 =
si
kj
3
X 0 = alors x est quelconque sinon x 0 =
si
kj
6
X 0 = alors
si
kj
2
X 0 = alors x est quelconque sinon x 0 =
si
kj
1
X 0 = alors y est quelconque sinon y 0 =
IV.3.2.4 Exemples :
a) engrenage cylindrique denture droite :
Premier choix M
01
: le torseur de la liaison quivalente
01
' sera
01
0 1 01
01 01
O
X 0
Y 0
Z N
=
`
)
Nous allons introduire un nouveau solide 3 entre 0 et 1 tel que le torseur de la liaison
03
sera
celui de
01
03
0 3 03 03
03 03
O
X 0
Y M
Z N
=
`
)
Thorie des mcanismes 36
Lapplication systmatique des rgles du paragraphe IV3.2.3 donnent :
- X
01
, Y
01,
Z
01
, N
01
0 X
13
, Y
13
, Z
13
, N
13
0
- L
01
= L
03
= 0 L
13
0
- M
01
= 0 ; M
03
0 M
13
= 0
- M
13
= 0 ; X
13
, Y
13
0 x = y = 0 ;
Finalement le torseur de la nouvelle liaison
13
sera
13 13
1 3 13
13 13
P
X L
Y 0
Z N
=
`
)
. Ce torseur correspond une liaison
pivot daxe Y en un point (0,0,z)
b) Mcanisme 4 barres :
premier choix : M
01
, X
12
, N
03
deuxime choix : X
01
, M
12
, N
12
x
y
Figure 31 : Engrenage cylindrique
avec pivot supplmentaire
1
0
2
3
5
4
6
Figure 31 : Mcanisme 4 barres
RRRPRRR
1
0
2
3
4
5
Figure 32 : Mcanisme 4 barres
RPRSRR
Thorie des mcanismes 37
V. Synthse des mcanismes :
La synthse des mcanismes est lopration qui consiste crer des nouveaux mcanismes qui
satisferont une fonction cinmatique donne. Nous distinguons deux phases de synthse. Ces
deux phases sont souvent considres comme deux types indpendants, la synthse
topologique et la synthse dimensionnelle. La synthse topologique est la phase qui permet de
dterminer la topologie ou la structure du mcanisme en choisissant la famille (mcanisme
engrenage ou articul par exemple) et en choisissant le nombre et les types des liaisons. La
synthse dimensionnelle permet, une fois la topologie dfinie, de dimensionner le mcanisme
afin dobtenir les caractristiques dsires des mouvements gnrs. Dans ce paragraphe nous
allons nous limiter la synthse topologique. Dabord une synthse globale ou prliminaire
travers un exemple dutilisation de la loi de mobilit globale. Puis un exemple de synthse
plus dtaill travers lanalyse cinmatique.
V.1 Exemple de synthse partir de la loi de mobilit globale :
La loi de mobilit globale peut tre applique dans une phase primaire de conception dans
laquelle on est encore la recherche dune topologie qui satisfait certaines conditions, telles
que le nombre des pices, le nombre et les types des liaisons, les degrs de mobilit et
dhyperstaticit.
Soit concevoir un mcanisme constituant un cycle unique et compos seulement de liaisons
une seule libert.
Exigeons que ce mcanisme soit isostatique (h = 0). Dans ces conditions quel sera le nombre
minimum p
min
de pices pour que ce mcanisme soit mobile.
Dsignons par l le nombre des liaisons ; p le nombre des pices.
Le mcanisme est cycle unique donc le nombre cyclomatique
c
= l p = 1 ce qui donne
l = p + 1.
Toutes les l liaisons sont un degr de libert do Ic = l = p +1.
La mobilit m est au minimum gale 1.
Lapplication de la loi de mobilit globale Ic6
c
= l 6 (lp) = m h = 1 nous amne p
min
= 6. Nous concluons quun mcanisme cycle unique, form par des liaisons un degr de
libert, et ayant un degr de mobilit, doit tre compos au minimum 6 pices pour quil soit
isostatique.
Si le nombre de pice est gal 5 on aura m = 0. On parle dans ce cas dune structure et non
pas dun mcanisme. Dune faon gnrale lorsque p s 5 ce mcanisme ne peut tre mobile
que sil est hyperstatique.
Admettons que ce mcanisme est form dun nombre minimum de pices pour constituer un
cycle (p = 1). Cherchons le degr dhyperstaticit pour que ce mcanisme ait une mobilit
m=1.
Puisque nous avons une seule pice alors l = 2 et par suite Ic = 2. Appliquons la loi de
mobilit : Ic6
c
= 2 6 = 1 h ce qui donne h = 5. Nous concluons que dans nos conditions
de dpart notre mcanisme compos dune seule
pice lie avec le bti par deux liaisons 1
degr de libert aura pour m = 1 un degr
dhyperstaticit h = 5.
V.2 Synthse topologique partir de ltude
cinmatique :
1
2
3
4
5
6
x
y
z
O
A
B
C
D
F
E
Thorie des mcanismes 38
Ce type de synthse sapplique une topologie pralablement choisie. A travers son tude
cinmatique dtaille comme celle vue prcdemment, il sera possible de lui appliquer des
modifications pour ladapter aux conditions recherches ou pour viter des configurations
particulires. Dans ce but, nous avons choisi une configuration du mcanisme de Sarrus. Ce
mcanisme deux branches identiques et daxe de symtrie (O, z) permet de gnrer un
mouvement de translation du solide 4 par rapport au bti 1.
Les torseurs cinmatiques associs aux liaisons crits dans le repre fixe (O, x, y, z) sont :
12 23 34 45 56 61
D E
C B
C B D E
O O O O O O
1 1 0 0 1 0
0 0 1 1 0 1
0 0 0 0 0 0
; ; ; ; ;
0 0 z z 0 0
z z 0 0 0 0
y y x x 0
12 23 34 45 56 61
= o = o o o o o
( ( ( ( (
( ( ( ( (
( ( ( ( (
( ( ( ( (
0 0 0 = 0 = 0 = 0 =
( ( ( ( (
( ( ( ( (
( ( ( ( (
( ( ( ( (
( ( ( ( (
0
(
(
(
(
(
(
(
(
(
On constate que ce mcanisme satisfait les conditions du mcanisme trait dans le paragraphe
prcdent. Il est compos dun cycle unique contenant 6 liaisons une seule libert chacune.
Il est donc facile de deviner quil est hyperstatique puisque le nombre des pices est gal 5.
Lquation de fermeture du cycle unique scrit :
{ }
12 23 34 45 56 61
0 0 +0 +0 +0 +0 +0 =
Le systme cinmatique qui en dcoule est
12
23
34
D E 45
B C 56
B C D E 61
1 1 1 0 0 0 (1) 0
0 0 0 1 1 1 (2) 0
0 0 0 0 0 0 (3) 0
0 0 0 z z 0 (4) 0
0 z z 0 0 0 (5) 0
0 y y x x 0 (6) 0
o ( ( (
( ( (
o
( ( (
( ( ( o
=
( ( (
o
( ( (
( ( (
o
( ( (
o
( (
.
Le rang maximal de la matrice associ est 5 puisque lquation (3) est triviale. On en dduit
que le degr dhyperstaticit minimal est gale h
min
= 6rang = 1. Puisque lquation (3) qui
reprsente la somme des vitesses de rotation autour de laxe z, lhyperstatisme est due un
surblocage en rotation suivant cet axe.
On doit chercher est ce quil peut exister des positions particulires o le degr
dhyperstaticit sera suprieur 1. Cela peut arriver lorsque le rang de la matrice est
infrieur 5. Autrement dit il nexiste pas un dterminant extrait de la matrice de dimension 5
qui peut tre non nul.
Admettons que o
12
soit la vitesse gnralise, sa colonne passe au second membre et il nous
reste aprs limination de lquation triviale (3) une matrice de dimension 5. Nous allons
chercher quand son dterminant sera nul.
D E
B C
B C D E
1 1 0 0 0
0 0 1 1 1
0 0 Z z 0 0
z z 0 0 0
y y x x 0
=
=
D E
B C
B C D E
1 1 0 0
0 0 z z
z z 0 0
y y x x
=
Thorie des mcanismes 39
D E D E
C B B C D E D E
C D E B D E
0 z z 0 z z
z 0 0 z 0 0 (z z )(x z z x ) 0
y x x y x x
+ = =
Il existe deux solutions cette quation. La premire solution est que
D E D E
(x z z x ) 0 = c'est-
-dire que OD // OE
, cette configuration ne peut tre atteinte que si les deux points E et D
sont confondus, ce qui nest pas permis par larchitecture du mcanisme. La seconde solution
est z
B
= z
C,
c'est--dire que la barre (3) sera bien horizontale. Cette position ne sera atteinte
que si les 4 barres (2), (3), (5) et (6) seront toutes horizontales. Nous concluons que pour
viter laugmentation du degr dhyperstaticit et par suite laugmentation du degr de
mobilit il faut viter la position o z
B
= z
C
=z
D
=z
E
=0. Cette position est dite position de
singularit pour ce mcanisme.
La question souvent pose dans le cas des mcanismes hyperstatiques est la possibilit
dviter lhyperstatisme sans toucher la mobilit. Une telle ventualit vite des conditions
gomtriques svres et par suite contribue une diminution considrable du cot des pices.
Nous avons vu comment nous pouvons liminer les efforts hyperstatiques partir de ltude
statique. Dans ce qui suit nous allons essayer datteindre le mme objectif pour ce mcanisme
de Sarrus mais travers ltude cinmatique ralise prcdemment.
Daprs le systme cinmatique ci-dessous, il suffit pour rendre le mcanisme isostatique de
rendre le rang de la matrice associe gal 6. IL faut donc rendre lquation (3) principale
tout en ajoutant une nouvelle libert pour garder m = 1. La solution la plus vidente est
dajouter une rotation
ij
suivant laxe z. Supposons que le centre de cette libert aura pour
coordonnes (x, y, z) alors nous obtenons le nouveau systme cinmatique suivant :
12
23
34
45
D E
56
B C
61
B C D E
ij
1 1 1 0 0 0 (1) 0 0
0 0 0 1 1 1 (2) 0 0
0 0 0 0 0 0 (3) 1 0
0 0 0 z z 0 (4) y 0
0 z z 0 0 0 (5) x 0
0 y y x x 0 (6) 0 0
o (
( (
(
o
( (
(
( (
( o
( (
(
o =
( (
(
( (
(
o
( (
(
o
( (
(
(
(
ij
sera seule dans la ligne (3), elle est donc calculable (
ij
= 0). Lquation (3) est devenue
principale. Si on limine la colonne ajoute et lquation (3) on aura 5 quations pour 6
inconnues comme prcdemment do la mobilit est inchange. Mais le plus intressant est
que ce rsultat est obtenu quelque soit la position de la libert ajoute.
Nous dduisons que si nous associons la libert ajoute une des 6 liaisons pour former une
liaison sphrique doigt nous obtenons un mcanisme de Sarrus isostatique.
Thorie des mcanismes 40
Das könnte Ihnen auch gefallen
- Poly Théorie Des MécanismesDokument24 SeitenPoly Théorie Des MécanismesJaksMaksNoch keine Bewertungen
- Cours Theorie Des MecanismesDokument5 SeitenCours Theorie Des MecanismessemahNoch keine Bewertungen
- Mobilite Et HyperstatismeDokument7 SeitenMobilite Et HyperstatismeFakhreddine Naimi100% (1)
- Theorie Des MécaDokument0 SeitenTheorie Des MécaSemlali ZakariaNoch keine Bewertungen
- Cours Theorie MecanismeDokument15 SeitenCours Theorie Mecanismemaraghni_hassine7592Noch keine Bewertungen
- Cours Theorie Des Mecanismes PDFDokument12 SeitenCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysVon EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNoch keine Bewertungen
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDokument14 SeitenChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsNoch keine Bewertungen
- COURS Théorie Des Mécanismes PDFDokument5 SeitenCOURS Théorie Des Mécanismes PDFMohamed NaciriNoch keine Bewertungen
- Série 01 Avec Solution TypeDokument3 SeitenSérie 01 Avec Solution Typenafaa_ali1375Noch keine Bewertungen
- ANALYSE de MécanismeDokument53 SeitenANALYSE de MécanismeAchref Sallami100% (1)
- Corrige Examen TM 2018Dokument5 SeitenCorrige Examen TM 2018FAWZI RONALDONoch keine Bewertungen
- (TDM) (CO) Theorie Des MecanismesDokument6 Seiten(TDM) (CO) Theorie Des MecanismesSimoMonkadNoch keine Bewertungen
- Cours Liaisons Schema CinematiqueDokument20 SeitenCours Liaisons Schema CinematiquekimNoch keine Bewertungen
- 13 9 TD - Transmission PDFDokument10 Seiten13 9 TD - Transmission PDFRanya ouherrouNoch keine Bewertungen
- Modélisation Cinématique Des MécanismesDokument8 SeitenModélisation Cinématique Des MécanismesmounirgemNoch keine Bewertungen
- 2 Acouplements PermenantsDokument10 Seiten2 Acouplements Permenantsmejri merin0% (1)
- 4-Les FreinsDokument13 Seiten4-Les FreinsChokri AtefNoch keine Bewertungen
- 1-Le Schéma Cinématique Des MécanismesDokument8 Seiten1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyNoch keine Bewertungen
- 4-Notion de Théorie Des Mécanismes PDFDokument5 Seiten4-Notion de Théorie Des Mécanismes PDFhamzaNoch keine Bewertungen
- AssemblagesDokument7 SeitenAssemblagesAdouni ZakNoch keine Bewertungen
- SciesauteusecorrectionDokument3 SeitenSciesauteusecorrectionyumiNoch keine Bewertungen
- 31 EmbrayagesDokument12 Seiten31 EmbrayagesSimoMonkad100% (1)
- Cours Analyse Des MecanismesDokument10 SeitenCours Analyse Des MecanismesNeoXana01Noch keine Bewertungen
- Poulies Et Courroies de Transmission: Entraînement Par AdhérenceDokument26 SeitenPoulies Et Courroies de Transmission: Entraînement Par AdhérenceWalid BelaaziNoch keine Bewertungen
- Théorie Des MécanismesDokument5 SeitenThéorie Des MécanismesMohamed Slim KhNoch keine Bewertungen
- Théorie de Mécanisme 4Dokument6 SeitenThéorie de Mécanisme 4hamza100% (1)
- Les Liaisons MécaniquesDokument6 SeitenLes Liaisons Mécaniquesabdelhi74100% (2)
- Modelisation Des Liaisons-ProfDokument11 SeitenModelisation Des Liaisons-ProfpaulNoch keine Bewertungen
- Examen de Conception Mecanique 2009 CorrigeDokument16 SeitenExamen de Conception Mecanique 2009 Corrigebhsbhs19Noch keine Bewertungen
- Cours Engrenages PDFDokument5 SeitenCours Engrenages PDFHanane Tounsi100% (2)
- 19 Cours Transmission de MouvementDokument4 Seiten19 Cours Transmission de MouvementAli HAJBINoch keine Bewertungen
- Reducteur RI40Dokument6 SeitenReducteur RI40watsop75% (4)
- TD Avant RattrapageDokument6 SeitenTD Avant RattrapageBakary Biro100% (1)
- TD-8 Hydraulique ProportionnelleDokument5 SeitenTD-8 Hydraulique ProportionnellemounaNoch keine Bewertungen
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDokument11 SeitenHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaNoch keine Bewertungen
- 3 1 4 Schema CinematiqueDokument1 Seite3 1 4 Schema Cinematiquehitachi hadiNoch keine Bewertungen
- Chaines de Solides - Comportement CinématiqueDokument8 SeitenChaines de Solides - Comportement CinématiqueAbdelali YacoubiNoch keine Bewertungen
- Schéma CinématiqueDokument19 SeitenSchéma CinématiqueSimo StitNoch keine Bewertungen
- Guidage en Translation PDFDokument10 SeitenGuidage en Translation PDFAzerty DelegfrNoch keine Bewertungen
- Cours TE 1 Schematisation Cinematique CorrectionDokument8 SeitenCours TE 1 Schematisation Cinematique Correctionhanane hamidiNoch keine Bewertungen
- CI4 TD64 C Table-BasculanteDokument3 SeitenCI4 TD64 C Table-BasculanteAbdelali Yacoubi33% (3)
- Schéma Cinématique - 2020Dokument6 SeitenSchéma Cinématique - 2020Mohsen Laabidi100% (1)
- Variateurs de VitesseDokument2 SeitenVariateurs de VitesseYekini Zulle DiattaNoch keine Bewertungen
- Théorie de Mécanisme 1Dokument15 SeitenThéorie de Mécanisme 1hamzaNoch keine Bewertungen
- ACCOUPLEMENTS ELASTIQUES-ACCOUPLEMENTS RIGIDES Edition 102014 PDFDokument56 SeitenACCOUPLEMENTS ELASTIQUES-ACCOUPLEMENTS RIGIDES Edition 102014 PDFKhaled SouaissaNoch keine Bewertungen
- Reduct Eur 2Dokument1 SeiteReduct Eur 2OUTEMSAANoch keine Bewertungen
- Embrayage Frein Et ReducteurDokument7 SeitenEmbrayage Frein Et ReducteurOtman OtoNoch keine Bewertungen
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesVon EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNoch keine Bewertungen
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Von EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Noch keine Bewertungen
- Fiabilité, maintenance prédictive et vibration des machinesVon EverandFiabilité, maintenance prédictive et vibration des machinesNoch keine Bewertungen
- Theorie Des MecanismesDokument42 SeitenTheorie Des MecanismesBaha Eddin FerjaniNoch keine Bewertungen
- Si Co08 MMC EfDokument21 SeitenSi Co08 MMC EfBrahim AchayfadNoch keine Bewertungen
- Cours Mécanismes PlanDokument21 SeitenCours Mécanismes Planndbira5Noch keine Bewertungen
- MEC-Analyse Des Mécanismes-Isostatisme-HyperstatismeDokument9 SeitenMEC-Analyse Des Mécanismes-Isostatisme-HyperstatismeDog RayzNoch keine Bewertungen
- Poly Mécanique Générale2012Dokument46 SeitenPoly Mécanique Générale2012hamzaoui612Noch keine Bewertungen
- CoursDokument61 SeitenCoursBen Aissa ChokriNoch keine Bewertungen
- Torseur WWW - Tunisie-EtudesDokument9 SeitenTorseur WWW - Tunisie-EtudesntayoubNoch keine Bewertungen
- Persta Industrie F PDFDokument140 SeitenPersta Industrie F PDFSemlali Zakaria100% (1)
- SpécificationsDokument11 SeitenSpécificationsSemlali ZakariaNoch keine Bewertungen
- Le Cuivre Et Ses AlliagesDokument1 SeiteLe Cuivre Et Ses AlliagesSemlali ZakariaNoch keine Bewertungen
- En8 10 PDFDokument1 SeiteEn8 10 PDFSemlali ZakariaNoch keine Bewertungen
- Calendrier DELF DALF TCF 2017-2018 08 09 2017 PDFDokument1 SeiteCalendrier DELF DALF TCF 2017-2018 08 09 2017 PDFkhalidlkkkNoch keine Bewertungen
- Cor3 13Dokument4 SeitenCor3 13Semlali Zakaria100% (1)
- Chapitre1 Comportement Élasto-PlastiqueDokument30 SeitenChapitre1 Comportement Élasto-PlastiqueSemlali Zakaria100% (1)
- Cscs tp2 PDFDokument2 SeitenCscs tp2 PDFSemlali ZakariaNoch keine Bewertungen
- Cscs tp2 PDFDokument2 SeitenCscs tp2 PDFSemlali ZakariaNoch keine Bewertungen
- L'Incompétence Est Le Secret de CarrièreDokument5 SeitenL'Incompétence Est Le Secret de CarrièreSemlali ZakariaNoch keine Bewertungen
- Détection de DéfautDokument3 SeitenDétection de DéfautSemlali ZakariaNoch keine Bewertungen
- Aide Mémoire MétallurgieDokument1 SeiteAide Mémoire MétallurgieSemlali Zakaria0% (1)
- Cor4 9Dokument1 SeiteCor4 9Semlali ZakariaNoch keine Bewertungen
- CD AideDokument1 SeiteCD AideSemlali ZakariaNoch keine Bewertungen
- En5 4Dokument1 SeiteEn5 4Semlali ZakariaNoch keine Bewertungen
- En9 3Dokument1 SeiteEn9 3Semlali ZakariaNoch keine Bewertungen
- En5 12Dokument1 SeiteEn5 12Semlali ZakariaNoch keine Bewertungen
- Cor14 4Dokument1 SeiteCor14 4Semlali ZakariaNoch keine Bewertungen
- En4 22Dokument1 SeiteEn4 22Semlali ZakariaNoch keine Bewertungen
- Code Du Travail Au MarocDokument187 SeitenCode Du Travail Au MarocSAKSIK100% (50)
- Cor5 6Dokument1 SeiteCor5 6Semlali ZakariaNoch keine Bewertungen
- Vrer PDFDokument1 SeiteVrer PDFSemlali ZakariaNoch keine Bewertungen
- En4 13Dokument1 SeiteEn4 13Semlali ZakariaNoch keine Bewertungen
- Methode de Jahn Scribd PDFDokument1 SeiteMethode de Jahn Scribd PDFSemlali ZakariaNoch keine Bewertungen
- Cor4 23Dokument1 SeiteCor4 23Semlali ZakariaNoch keine Bewertungen
- En5 4Dokument1 SeiteEn5 4Semlali ZakariaNoch keine Bewertungen
- La Methode Du Simplexe Scribd PDFDokument1 SeiteLa Methode Du Simplexe Scribd PDFSemlali ZakariaNoch keine Bewertungen
- En4 20Dokument1 SeiteEn4 20Semlali ZakariaNoch keine Bewertungen
- Cor4 14Dokument1 SeiteCor4 14Semlali ZakariaNoch keine Bewertungen
- En5 11Dokument1 SeiteEn5 11Semlali ZakariaNoch keine Bewertungen
- Cours 3 Modelisation Vectorielle de La MSDokument8 SeitenCours 3 Modelisation Vectorielle de La MSYoussef romadiNoch keine Bewertungen
- Sujet 1 PDFDokument10 SeitenSujet 1 PDFLarbi ElbakkaliNoch keine Bewertungen
- Pont RoulantDokument57 SeitenPont RoulantHatim Ettaib100% (3)
- Manuel D'atelier: Caractéristiques TechniquesDokument38 SeitenManuel D'atelier: Caractéristiques TechniquesJl Ramavo100% (1)
- DevoirDokument2 SeitenDevoirsimeon tchoffoNoch keine Bewertungen
- TMEL - Automatisme SchémaDokument4 SeitenTMEL - Automatisme SchémaAina RATSIMBAZAFYNoch keine Bewertungen
- D5-1 Classification Des Machines Tournantes PDFDokument12 SeitenD5-1 Classification Des Machines Tournantes PDFhamraoui chahrazedNoch keine Bewertungen
- La Pompe CentrifugeDokument12 SeitenLa Pompe CentrifugeAfa AlgeriaNoch keine Bewertungen
- PompeDokument20 SeitenPompeAmi RaNoch keine Bewertungen
- 8.1.le GraissageDokument2 Seiten8.1.le GraissageYacouba OuedraogoNoch keine Bewertungen
- PMHP1000 201Dokument71 SeitenPMHP1000 201NMNoch keine Bewertungen
- Devoir de Synth N2 1ère A 2022Dokument18 SeitenDevoir de Synth N2 1ère A 2022Khaled HamdaniNoch keine Bewertungen
- FraisageDokument20 SeitenFraisageOussama CherifiNoch keine Bewertungen
- Guide 20competition1973Dokument66 SeitenGuide 20competition1973GORDNoch keine Bewertungen
- Disjoncteurs Moteurs Magnetothermiques: ObjectifsDokument6 SeitenDisjoncteurs Moteurs Magnetothermiques: ObjectifsRANAIVOARIMANANANoch keine Bewertungen
- Notice - Utilisation - TTZ - THOMAS NicolasDokument40 SeitenNotice - Utilisation - TTZ - THOMAS NicolasAlexandre Brunet100% (1)
- Compte Rendu TP2 - Machine À Courant ContinuDokument9 SeitenCompte Rendu TP2 - Machine À Courant ContinuAbderrahim HamdadNoch keine Bewertungen
- Notice Entretien MZ 125 RT v2.2 Schéma ÉlectriqueDokument191 SeitenNotice Entretien MZ 125 RT v2.2 Schéma Électriquerichard kapilaNoch keine Bewertungen
- Pompes À Transfert de GazDokument4 SeitenPompes À Transfert de GazAsma GriniNoch keine Bewertungen
- Boudissa, MahrezDokument117 SeitenBoudissa, Mahrezabd elheq zeguerrouNoch keine Bewertungen
- Liaison EncastrementDokument14 SeitenLiaison Encastrementntayoub100% (1)
- Machines ReceptricesDokument9 SeitenMachines ReceptricesMonssif NajimNoch keine Bewertungen
- Catalogue ESPINOSA - 05.11Dokument296 SeitenCatalogue ESPINOSA - 05.11info490100% (1)
- Fiche PneumatiqueDokument0 SeitenFiche PneumatiqueAlassane DioufNoch keine Bewertungen
- Homologation Form Number 226 Group B - 104 ZS2 5 VitessesDokument20 SeitenHomologation Form Number 226 Group B - 104 ZS2 5 VitessesThierry MERVILLENoch keine Bewertungen
- Dossier Vérins: 20.11.2014 Slide 1 © Festo Didactic, Training and Consulting F-Be/ Tac@festo - BeDokument28 SeitenDossier Vérins: 20.11.2014 Slide 1 © Festo Didactic, Training and Consulting F-Be/ Tac@festo - BeFiras ChkNoch keine Bewertungen
- ThermodynamiqueDokument25 SeitenThermodynamiquekamalistaNoch keine Bewertungen
- Renault Laguna IiDokument5 SeitenRenault Laguna IiDAGORNNoch keine Bewertungen
- Epreuve E42 Bts Elec 2020 Metropole Elements de CorrectionDokument10 SeitenEpreuve E42 Bts Elec 2020 Metropole Elements de CorrectionGenie SONGONoch keine Bewertungen
- Les Machines Asynchrones I) Moteur Asynchrone: F PN P F GFDokument2 SeitenLes Machines Asynchrones I) Moteur Asynchrone: F PN P F GFZAKARIANoch keine Bewertungen