Das könnte Ihnen auch gefallen
- Aerodynamic Analysis of A Two-Man BobsleighDokument29 SeitenAerodynamic Analysis of A Two-Man BobsleighRichard HilsonNoch keine Bewertungen
- Bobsleigh TutorialDokument19 SeitenBobsleigh TutorialalllyNoch keine Bewertungen
- Dynamic Analysis of Leaf SpringDokument9 SeitenDynamic Analysis of Leaf SpringTHEBESTNoch keine Bewertungen
- 1Dokument4 Seiten1johnNoch keine Bewertungen
- CE-312 Strain Transformation Mohr's CircleDokument6 SeitenCE-312 Strain Transformation Mohr's CircleMuhammad AdilNoch keine Bewertungen
- Thermodynamics: Strain Gauge ExperimentDokument6 SeitenThermodynamics: Strain Gauge ExperimentJeromeClintonNoch keine Bewertungen
- Analysis of A Strain Gage RosetteDokument9 SeitenAnalysis of A Strain Gage RosetteHimanshu PunethaNoch keine Bewertungen
- Passive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeDokument6 SeitenPassive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeChristian Mavarez0% (2)
- Complete Design Report Team JaabazDokument89 SeitenComplete Design Report Team JaabazpiyushnsitNoch keine Bewertungen
- Development of Analytical Process To Reduce Side Load in Strut-Type SuspensionDokument6 SeitenDevelopment of Analytical Process To Reduce Side Load in Strut-Type SuspensionJessica OwensNoch keine Bewertungen
- Extending SteinbergDokument35 SeitenExtending SteinbergKaushik ViswanathanNoch keine Bewertungen
- Chapter2 170106173021 PDFDokument15 SeitenChapter2 170106173021 PDFRākesh RakhiNoch keine Bewertungen
- Spider8 ManualDokument132 SeitenSpider8 ManualskedonkiNoch keine Bewertungen
- History of Vehicle Body Development from Ancient Wheels to Modern CarsDokument19 SeitenHistory of Vehicle Body Development from Ancient Wheels to Modern CarsRiccardo AndolfiNoch keine Bewertungen
- Crown in Shield, Brand - 1981 - A Physiologically Based Criterion of Muscle Force Prediction in Locomotion-AnnotatedDokument9 SeitenCrown in Shield, Brand - 1981 - A Physiologically Based Criterion of Muscle Force Prediction in Locomotion-AnnotatednicososolNoch keine Bewertungen
- MD2 Plate 8 Block Brakes Nov2023Dokument2 SeitenMD2 Plate 8 Block Brakes Nov2023Shadow UnbalanZedNoch keine Bewertungen
- Aero Masters Thesis Delft NLDokument103 SeitenAero Masters Thesis Delft NLRichard HilsonNoch keine Bewertungen
- Sway Bar CalculationsDokument6 SeitenSway Bar CalculationsMark van BuurenNoch keine Bewertungen
- Me6503 Dme Unit 5 Study Notes 2015Dokument25 SeitenMe6503 Dme Unit 5 Study Notes 2015Bala MuruganNoch keine Bewertungen
- A Computational Study of The Flow Around An Isolated Wheel in Contact With The GroundDokument11 SeitenA Computational Study of The Flow Around An Isolated Wheel in Contact With The GroundDaniel JueNoch keine Bewertungen
- Palmgren MinerDokument3 SeitenPalmgren Minerdamec1234Noch keine Bewertungen
- Vehicle Handling:ride Comfort ISO 2631Dokument4 SeitenVehicle Handling:ride Comfort ISO 2631Mümün YıldızNoch keine Bewertungen
- Ccmai ArboreDokument13 SeitenCcmai ArboreEduard Gheorghe100% (1)
- Finite element analysis improves fatigue life of suspension coil springsDokument6 SeitenFinite element analysis improves fatigue life of suspension coil springsSameer SinghNoch keine Bewertungen
- Design and Analysis of Rack and Pinion Steering System ComponentsDokument22 SeitenDesign and Analysis of Rack and Pinion Steering System ComponentsOmar MuñozNoch keine Bewertungen
- Rolling Contact Phenomena - Kalker PDFDokument84 SeitenRolling Contact Phenomena - Kalker PDFAnonymous eCD5ZRNoch keine Bewertungen
- PaigeDokument15 SeitenPaigeklomps_jrNoch keine Bewertungen
- SAE 2002-01-3105 (Screen)Dokument14 SeitenSAE 2002-01-3105 (Screen)rajdrklNoch keine Bewertungen
- FEMCI Book - Miles' EquationDokument4 SeitenFEMCI Book - Miles' Equationபிரபாகரன் ஆறுமுகம்Noch keine Bewertungen
- Free VibrationDokument11 SeitenFree VibrationEz99Noch keine Bewertungen
- Klein Technical GuidelineDokument21 SeitenKlein Technical GuidelinePeter100% (2)
- Module 40 Solution Fatigue Goodman DiagramDokument2 SeitenModule 40 Solution Fatigue Goodman DiagramWolf Lord0% (1)
- Efficiency Analysis of An Aerospike Nozzle: Dipak J. Choudhari, Uday V. AsolekarDokument5 SeitenEfficiency Analysis of An Aerospike Nozzle: Dipak J. Choudhari, Uday V. AsolekarAswith R ShenoyNoch keine Bewertungen
- Ansys Software Question Bank For Baja 2014: SL No. Questions AnswersDokument2 SeitenAnsys Software Question Bank For Baja 2014: SL No. Questions AnswerspriyeshdongreNoch keine Bewertungen
- Seismic Response of SDOF SystemsDokument42 SeitenSeismic Response of SDOF SystemsRonnie1478Noch keine Bewertungen
- Question Bank Unit IIDokument10 SeitenQuestion Bank Unit IISachin BharadwajNoch keine Bewertungen
- Car TutorialsDokument46 SeitenCar TutorialsmvbighouseNoch keine Bewertungen
- PhysicsDokument12 SeitenPhysicsTahfim KhanNoch keine Bewertungen
- Vibration FundamentalsDokument60 SeitenVibration Fundamentalsrukmini_ramkiNoch keine Bewertungen
- Home Search Collections Journals About Contact Us My IopscienceDokument8 SeitenHome Search Collections Journals About Contact Us My IopscienceCan CemreNoch keine Bewertungen
- 10 1 1 6Dokument148 Seiten10 1 1 6Lky LauNoch keine Bewertungen
- Ride IndexDokument15 SeitenRide IndexPavan GopNoch keine Bewertungen
- Car Dynamics Using Quarter Model and Passive Suspension, PDFDokument9 SeitenCar Dynamics Using Quarter Model and Passive Suspension, PDFwelsya100% (1)
- Electrical Malfunctions Vibrodiagnosis at The Direct Current MotorsDokument5 SeitenElectrical Malfunctions Vibrodiagnosis at The Direct Current MotorsCristian BanarieNoch keine Bewertungen
- Round Link Chains U2000 According To Din 22252Dokument1 SeiteRound Link Chains U2000 According To Din 22252VictorNoch keine Bewertungen
- Steering Design For A Formula SAE-A Open Wheel Race CarDokument154 SeitenSteering Design For A Formula SAE-A Open Wheel Race CarSoham LahiriNoch keine Bewertungen
- Influence of The Primary Suspension Damping - Madalina DumitriuDokument16 SeitenInfluence of The Primary Suspension Damping - Madalina DumitriudianaNoch keine Bewertungen
- Spring TestDokument3 SeitenSpring TestShubham MauryaNoch keine Bewertungen
- Longitudinal Vehicle DynamicsDokument4 SeitenLongitudinal Vehicle DynamicsArunNoch keine Bewertungen
- Design and Analysis of Disc Brake and Caliper of Four WheelerDokument5 SeitenDesign and Analysis of Disc Brake and Caliper of Four WheelerIJSTENoch keine Bewertungen
- Kinematic analysis of multi-faced rock slopesDokument11 SeitenKinematic analysis of multi-faced rock slopespleyvaze100% (2)
- Tech-03 Springs-Roll Stiffness-4 PDFDokument9 SeitenTech-03 Springs-Roll Stiffness-4 PDFMibsão EsdrasNoch keine Bewertungen
- TRDTGRDGDokument8 SeitenTRDTGRDGNguyễn Văn ThườngNoch keine Bewertungen
- Design Project: MENG 375: Design III Design and Analysis of Crank Arm of A BicycleDokument4 SeitenDesign Project: MENG 375: Design III Design and Analysis of Crank Arm of A Bicycleسیف الرحمنNoch keine Bewertungen
- Hydraulic Clutch Pedal SystemDokument3 SeitenHydraulic Clutch Pedal SystemRamakrishnan RangaNoch keine Bewertungen
- Low Noise Vacuum Mems Closed-Loop Accelerometer Using Sixth-Order Multi-Feedback Loops and Local Resonator Sigma Delta ModulatorDokument4 SeitenLow Noise Vacuum Mems Closed-Loop Accelerometer Using Sixth-Order Multi-Feedback Loops and Local Resonator Sigma Delta ModulatorMadhu JbNoch keine Bewertungen
- Novel WeigtedDokument5 SeitenNovel WeigtedLiju TrNoch keine Bewertungen
- Hwa 2Dokument10 SeitenHwa 2imryuk19Noch keine Bewertungen
- Of As: Double-Drift-Region (P ' P ') Diode OscillatorsDokument3 SeitenOf As: Double-Drift-Region (P ' P ') Diode Oscillatorsanjan_debnathNoch keine Bewertungen
- Novel Modeling and Damping Technique For Hybrid Stepper MotorDokument6 SeitenNovel Modeling and Damping Technique For Hybrid Stepper MotorVashik BedasieNoch keine Bewertungen
- The Evolution of Al-Li Base Products For AerospaceDokument14 SeitenThe Evolution of Al-Li Base Products For AerospaceRichard HilsonNoch keine Bewertungen
- 10th Cav New York Civil War RosterDokument299 Seiten10th Cav New York Civil War RosterRichard HilsonNoch keine Bewertungen
- Fatigue Behaviour of The Aeronautical Al-Li (2198) Aluminum AlloyDokument28 SeitenFatigue Behaviour of The Aeronautical Al-Li (2198) Aluminum AlloyRichard HilsonNoch keine Bewertungen
- Multi Staging of RocketsDokument7 SeitenMulti Staging of RocketskrishnamurthyVishNoch keine Bewertungen
- Damage and Failure of Composite MaterialsDokument315 SeitenDamage and Failure of Composite MaterialsKathir Vel88% (8)
- Nonlinear Robust Control of An Highly Manoeuvrable MissileDokument15 SeitenNonlinear Robust Control of An Highly Manoeuvrable MissileRichard HilsonNoch keine Bewertungen
- Hiram Maxim's groundbreaking machinegun and its impactDokument47 SeitenHiram Maxim's groundbreaking machinegun and its impactRichard HilsonNoch keine Bewertungen
- Analysis of The Staging Maneuver and Booster Glideback Guidance For A Two Stage, Winged, Fully Reusable Launch VehicleDokument30 SeitenAnalysis of The Staging Maneuver and Booster Glideback Guidance For A Two Stage, Winged, Fully Reusable Launch VehicleRichard HilsonNoch keine Bewertungen
- Application of Filament Winding To Cannon and Cannon ComponentsDokument105 SeitenApplication of Filament Winding To Cannon and Cannon ComponentsRichard Hilson100% (1)
- Penn Death Index G Thru H 1931Dokument188 SeitenPenn Death Index G Thru H 1931Richard HilsonNoch keine Bewertungen
- Lecture 1-Rocket ScienceDokument3 SeitenLecture 1-Rocket Science06me395Noch keine Bewertungen
- Progressive Design Analysis of Bonded JointsDokument47 SeitenProgressive Design Analysis of Bonded JointsRichard HilsonNoch keine Bewertungen
- Lecture 2-Rocket TheoryDokument7 SeitenLecture 2-Rocket Theory06me395Noch keine Bewertungen
- A Brief Introduction To Hydrocode Modeling of Impact CrateringDokument19 SeitenA Brief Introduction To Hydrocode Modeling of Impact CrateringRichard HilsonNoch keine Bewertungen
- Penn Death Index G Thru H 1930Dokument194 SeitenPenn Death Index G Thru H 1930Richard HilsonNoch keine Bewertungen
- Decatur Co Iowa Marriage Index by GroomDokument128 SeitenDecatur Co Iowa Marriage Index by GroomRichard HilsonNoch keine Bewertungen
- Aero Masters Thesis Delft NLDokument103 SeitenAero Masters Thesis Delft NLRichard HilsonNoch keine Bewertungen
- Computer Aided Engineering in Compression MoldingDokument12 SeitenComputer Aided Engineering in Compression MoldingRichard HilsonNoch keine Bewertungen
- 2600 The Hacker Quarterly, 19 1 (Spr02)Dokument60 Seiten2600 The Hacker Quarterly, 19 1 (Spr02)Richard HilsonNoch keine Bewertungen
- The Koehler Method of Guard Dog TrainingDokument512 SeitenThe Koehler Method of Guard Dog Trainingwebbots100% (1)
- (Ebook) Digzine Hacker Magazine Issue 3Dokument25 Seiten(Ebook) Digzine Hacker Magazine Issue 3Richard HilsonNoch keine Bewertungen
- HackingDokument84 SeitenHackingDanilo Caruso80% (5)
- NDTDokument80 SeitenNDTsungkang92% (12)
- NDTDokument80 SeitenNDTsungkang92% (12)
- Finite Element Analysis of Notre Dame Cathedral in AmiensDokument30 SeitenFinite Element Analysis of Notre Dame Cathedral in AmiensRichard HilsonNoch keine Bewertungen
- USS Consitiution Drawings 1927 1931 RestoreDokument142 SeitenUSS Consitiution Drawings 1927 1931 RestoreRichard Hilson100% (1)
- Computer Aided Engineering in Compression MoldingDokument12 SeitenComputer Aided Engineering in Compression MoldingRichard HilsonNoch keine Bewertungen
- Computer Aided Engineering in Compression MoldingDokument12 SeitenComputer Aided Engineering in Compression MoldingRichard HilsonNoch keine Bewertungen
- Chapter 2 Cast IronDokument9 SeitenChapter 2 Cast IronHelen AdugnaNoch keine Bewertungen
- Manual 800 KvaDokument87 SeitenManual 800 Kvavicvarg100% (3)
- Power Transmission, Distribution and Utilization: Lecture# 13 &14: Underground CablesDokument29 SeitenPower Transmission, Distribution and Utilization: Lecture# 13 &14: Underground CablesPhD EENoch keine Bewertungen
- Carimin Acacia Stability-Onhire Loading JerunDokument6 SeitenCarimin Acacia Stability-Onhire Loading Jerunh2sbnj86b4Noch keine Bewertungen
- Lg938l - Operation & Maintenance ManualDokument114 SeitenLg938l - Operation & Maintenance ManualMuhammad Nadim MakhlufNoch keine Bewertungen
- Assign4 RANSDokument2 SeitenAssign4 RANSankitsaneetNoch keine Bewertungen
- Luran S KR2868C: Acrylonitrile Styrene Acrylate / Polycarbonate (ASA/PC)Dokument3 SeitenLuran S KR2868C: Acrylonitrile Styrene Acrylate / Polycarbonate (ASA/PC)rosebifNoch keine Bewertungen
- FH400 73158464 Pca-6.140Dokument431 SeitenFH400 73158464 Pca-6.140IgorGorduz100% (1)
- Unit 6Dokument13 SeitenUnit 6VeronicaNoch keine Bewertungen
- Permeability: The Key to ProductionDokument30 SeitenPermeability: The Key to ProductionDarshak Sakhreliya100% (1)
- Modeling of The Effective Thermal Conductivity and Diffusivity of A Packed Bed With Stagnant FluidDokument9 SeitenModeling of The Effective Thermal Conductivity and Diffusivity of A Packed Bed With Stagnant Fluidbasura12345Noch keine Bewertungen
- Operator Interface Hmi Touch Screen Cmore - 10Dokument54 SeitenOperator Interface Hmi Touch Screen Cmore - 10QuantumAutomation100% (1)
- Dewatering SystemDokument124 SeitenDewatering SystemSpyros NannosNoch keine Bewertungen
- 2 Interference in Spur GearsDokument2 Seiten2 Interference in Spur Gearschris100% (1)
- Interaction & Bank EffectDokument6 SeitenInteraction & Bank EffectAkash KandwalNoch keine Bewertungen
- Grounding Vs BondingDokument2 SeitenGrounding Vs BondingVictor HutahaeanNoch keine Bewertungen
- Ceramic Terminal BlocksDokument1 SeiteCeramic Terminal BlockselijbbNoch keine Bewertungen
- CS-280E Chain Saw: Parts CatalogDokument16 SeitenCS-280E Chain Saw: Parts CatalogГоран СтанишићNoch keine Bewertungen
- AASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageDokument11 SeitenAASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageErnesto Oscar VidelaNoch keine Bewertungen
- Saint Gobain - CertainTeed Roofing ShinglesDokument14 SeitenSaint Gobain - CertainTeed Roofing ShinglesJagriti KashyapNoch keine Bewertungen
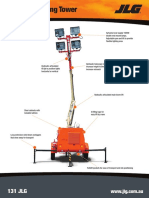
- JLG Lighting Tower 6308AN Series II 20150907Dokument2 SeitenJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Noch keine Bewertungen
- Thinking ForthDokument311 SeitenThinking ForthCristianNoch keine Bewertungen
- Partlist Smsport 110RDokument74 SeitenPartlist Smsport 110RThai YunNoch keine Bewertungen
- How Do We Classify An Antipumping Relay?: What Will Happen If Antipumping Relay Circuit Is Not Present?Dokument6 SeitenHow Do We Classify An Antipumping Relay?: What Will Happen If Antipumping Relay Circuit Is Not Present?joseNoch keine Bewertungen
- Excellent Hex Key Wrench: English VersionDokument54 SeitenExcellent Hex Key Wrench: English Versionmg pyaeNoch keine Bewertungen
- Control Fixed Bed ReactorsDokument4 SeitenControl Fixed Bed ReactorsAddison JuttieNoch keine Bewertungen
- Achievements Under EpiraDokument6 SeitenAchievements Under EpiraLyn Dela Cruz DumoNoch keine Bewertungen
- XZX ZX ZXDokument4 SeitenXZX ZX ZXWong VoonyeeNoch keine Bewertungen
- End All Red Overdrive: Controls and FeaturesDokument6 SeitenEnd All Red Overdrive: Controls and FeaturesBepe uptp5aNoch keine Bewertungen
- Ornl 2465Dokument101 SeitenOrnl 2465jesusNoch keine Bewertungen
- Infinite Powers: How Calculus Reveals the Secrets of the UniverseVon EverandInfinite Powers: How Calculus Reveals the Secrets of the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (126)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessVon EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessBewertung: 4 von 5 Sternen4/5 (6)
- Quantum Physics: What Everyone Needs to KnowVon EverandQuantum Physics: What Everyone Needs to KnowBewertung: 4.5 von 5 Sternen4.5/5 (48)
- The End of Everything: (Astrophysically Speaking)Von EverandThe End of Everything: (Astrophysically Speaking)Bewertung: 4.5 von 5 Sternen4.5/5 (155)
- Summary and Interpretation of Reality TransurfingVon EverandSummary and Interpretation of Reality TransurfingBewertung: 5 von 5 Sternen5/5 (5)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismVon EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismBewertung: 4 von 5 Sternen4/5 (500)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldVon EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldBewertung: 4.5 von 5 Sternen4.5/5 (8)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterVon EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterBewertung: 4.5 von 5 Sternen4.5/5 (409)
- Quantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishVon EverandQuantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishBewertung: 4.5 von 5 Sternen4.5/5 (18)
- A Brief History of Time: From the Big Bang to Black HolesVon EverandA Brief History of Time: From the Big Bang to Black HolesBewertung: 4 von 5 Sternen4/5 (2193)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceVon EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceBewertung: 4.5 von 5 Sternen4.5/5 (23)
- Packing for Mars: The Curious Science of Life in the VoidVon EverandPacking for Mars: The Curious Science of Life in the VoidBewertung: 4 von 5 Sternen4/5 (1395)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeVon EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNoch keine Bewertungen
- Bedeviled: A Shadow History of Demons in ScienceVon EverandBedeviled: A Shadow History of Demons in ScienceBewertung: 5 von 5 Sternen5/5 (5)
- The Holographic Universe: The Revolutionary Theory of RealityVon EverandThe Holographic Universe: The Revolutionary Theory of RealityBewertung: 4.5 von 5 Sternen4.5/5 (75)
- Lost in Math: How Beauty Leads Physics AstrayVon EverandLost in Math: How Beauty Leads Physics AstrayBewertung: 4.5 von 5 Sternen4.5/5 (125)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsVon EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsBewertung: 4 von 5 Sternen4/5 (94)
- The Beginning of Infinity: Explanations That Transform the WorldVon EverandThe Beginning of Infinity: Explanations That Transform the WorldBewertung: 5 von 5 Sternen5/5 (60)
- Starry Messenger: Cosmic Perspectives on CivilizationVon EverandStarry Messenger: Cosmic Perspectives on CivilizationBewertung: 4.5 von 5 Sternen4.5/5 (158)
- What is Life?: With Mind and Matter and Autobiographical SketchesVon EverandWhat is Life?: With Mind and Matter and Autobiographical SketchesBewertung: 4 von 5 Sternen4/5 (139)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormVon EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormBewertung: 5 von 5 Sternen5/5 (5)
- The Biggest Number in the World: A Journey to the Edge of MathematicsVon EverandThe Biggest Number in the World: A Journey to the Edge of MathematicsBewertung: 4.5 von 5 Sternen4.5/5 (5)
- Black Holes: The Key to Understanding the UniverseVon EverandBlack Holes: The Key to Understanding the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (13)