Das könnte Ihnen auch gefallen
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasVon EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasBewertung: 4.5 von 5 Sternen4.5/5 (14)
- Mantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409Von EverandMantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409Bewertung: 4.5 von 5 Sternen4.5/5 (7)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Von EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Bewertung: 5 von 5 Sternen5/5 (2)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoVon EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoBewertung: 4 von 5 Sternen4/5 (4)
- Ingeniería de la energía eólicaVon EverandIngeniería de la energía eólicaBewertung: 4.5 von 5 Sternen4.5/5 (6)
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposVon EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposBewertung: 5 von 5 Sternen5/5 (1)
- UF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselVon EverandUF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Energía Eólica. Integración a la red eléctricaVon EverandEnergía Eólica. Integración a la red eléctricaBewertung: 3.5 von 5 Sternen3.5/5 (4)
- El vehículo eléctrico: Desafíos tecnológicos, infraestructuras y oportunidades de negocioVon EverandEl vehículo eléctrico: Desafíos tecnológicos, infraestructuras y oportunidades de negocioBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorVon EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorNoch keine Bewertungen
- Curvas Caracteristicas de Los Motores PDFDokument19 SeitenCurvas Caracteristicas de Los Motores PDFJuan Carlos Puma Reátegui100% (2)
- Técnicas básicas de mecánica de vehículos. TMVG0109Von EverandTécnicas básicas de mecánica de vehículos. TMVG0109Noch keine Bewertungen
- Analisi Precios Unitarios AlcantarillaDokument7 SeitenAnalisi Precios Unitarios AlcantarillaJamilthonPerezNicolas100% (1)
- Diseño de Un Controlador PID Difuso para Una Planta de Segundo Orden Sub-Amortiguada Usando LABVIEWDokument52 SeitenDiseño de Un Controlador PID Difuso para Una Planta de Segundo Orden Sub-Amortiguada Usando LABVIEWcss_unac100% (2)
- Caja de CambioDokument25 SeitenCaja de Cambiopierre warner cordova castro100% (3)
- Expediente Tecnico 1Dokument12 SeitenExpediente Tecnico 1Mirella Gonzales100% (1)
- Catalogo Gates Guia Rapida PesadoDokument16 SeitenCatalogo Gates Guia Rapida PesadoGuillermo CarrilloNoch keine Bewertungen
- Mantenimiento, preparación y manejo de tractores. AGAC0108Von EverandMantenimiento, preparación y manejo de tractores. AGAC0108Noch keine Bewertungen
- Manual Frenos Road HouseDokument81 SeitenManual Frenos Road HouseHans Torres GuerraNoch keine Bewertungen
- Caja de CambiosDokument16 SeitenCaja de CambiosJhorge VenegasNoch keine Bewertungen
- Catalogo de Rejillas Metalicas GRATING MEISER LatamDokument36 SeitenCatalogo de Rejillas Metalicas GRATING MEISER LatamelpijuNoch keine Bewertungen
- Caja Automatica 2Dokument24 SeitenCaja Automatica 2agalarzag86% (7)
- Frenado de Motores AsincronosDokument14 SeitenFrenado de Motores AsincronosSergio Albis100% (1)
- Reporte 8 Suspensiones IDokument11 SeitenReporte 8 Suspensiones Imarcos613Noch keine Bewertungen
- ITIL V3 Manual CompletoDokument6 SeitenITIL V3 Manual CompletoAlinaAvilesNoch keine Bewertungen
- Unidad Dental QL2028, Dental Unit, Fengdan, CATALOGO PDFDokument7 SeitenUnidad Dental QL2028, Dental Unit, Fengdan, CATALOGO PDFAnibal PeñaNoch keine Bewertungen
- Pruebas Que Se Efectuan A Los Motores de Combustión InternaDokument17 SeitenPruebas Que Se Efectuan A Los Motores de Combustión InternaOctavinho Corona Salinas50% (4)
- Guía para El Diseño de Puentes Con Vigas y LosasDokument136 SeitenGuía para El Diseño de Puentes Con Vigas y LosasJorge CastroNoch keine Bewertungen
- Análisis Cinemático de Una Transmisión AutomáticaDokument9 SeitenAnálisis Cinemático de Una Transmisión AutomáticaJavier NavaNoch keine Bewertungen
- Diseño de Una Caja de Cambios PDFDokument182 SeitenDiseño de Una Caja de Cambios PDFHillary Haydee Figueroa VenturaNoch keine Bewertungen
- Avance Proyecto de Gato Electrico 2do GrupoDokument9 SeitenAvance Proyecto de Gato Electrico 2do GrupoJêffersôn Vladîmîr0% (1)
- Tema 1 STFDokument26 SeitenTema 1 STFBenjamin SanchezNoch keine Bewertungen
- Movimiento vehículos factores influyenDokument26 SeitenMovimiento vehículos factores influyenJMNoch keine Bewertungen
- Tema 4 Gestion Tecnica TraficoDokument27 SeitenTema 4 Gestion Tecnica TraficoputocalvoNoch keine Bewertungen
- Potencia y Par Motor. Cadena Cinemática. Estabilidad en los VehículosDokument27 SeitenPotencia y Par Motor. Cadena Cinemática. Estabilidad en los VehículosJUAN BAUTISTANoch keine Bewertungen
- Manual APF pdf-OKDokument10 SeitenManual APF pdf-OKJOSE PEREZ LEONNoch keine Bewertungen
- Grupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasDokument6 SeitenGrupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasDanny Juela100% (1)
- Practica 5 Automatizacion Industrial Circuitos Hidraulicos y Neumaticos.Dokument6 SeitenPractica 5 Automatizacion Industrial Circuitos Hidraulicos y Neumaticos.Emmanueel FariiasNoch keine Bewertungen
- Par MotorDokument3 SeitenPar Motordreyes3773Noch keine Bewertungen
- UNIDAD 6 VolantesDokument18 SeitenUNIDAD 6 VolantesJeremías Arias Tapia100% (1)
- Caja de Cambios ManualDokument145 SeitenCaja de Cambios ManualFausto ArmijosNoch keine Bewertungen
- MANUAL DE PASTILLAS DE FRENO - BalatasDokument75 SeitenMANUAL DE PASTILLAS DE FRENO - BalatasJerry McGuire MartinezNoch keine Bewertungen
- Tren de Fuerza MotrizDokument38 SeitenTren de Fuerza MotrizLuCho SiguenzaNoch keine Bewertungen
- Cajas MecanicasDokument10 SeitenCajas MecanicasDanny Cruz MendozaNoch keine Bewertungen
- Cajas de Cambio RobotizadasDokument29 SeitenCajas de Cambio RobotizadasJHON FRANS RAMIREZ MAMANINoch keine Bewertungen
- Sistema de Caja de Cambios - DiferencialDokument23 SeitenSistema de Caja de Cambios - DiferencialPierre Cordova CastroNoch keine Bewertungen
- Introducción A La Caja de Cambios.Dokument51 SeitenIntroducción A La Caja de Cambios.Anthony DaríoNoch keine Bewertungen
- Curvas Caracteristicas de Motores y Vehiculos Recomprimidos.Dokument49 SeitenCurvas Caracteristicas de Motores y Vehiculos Recomprimidos.Guido PinedoNoch keine Bewertungen
- Transmision AutomaticasDokument11 SeitenTransmision AutomaticasMiiguel AngelNoch keine Bewertungen
- Relacion de TransmisionDokument8 SeitenRelacion de TransmisionEdwin SurcoNoch keine Bewertungen
- Motor de Combustión Interna 1Dokument8 SeitenMotor de Combustión Interna 1EFrenAriasHernandezNoch keine Bewertungen
- Restructuración CAPÍTULO II 03-06-2019Dokument26 SeitenRestructuración CAPÍTULO II 03-06-2019Anita GanchalaNoch keine Bewertungen
- GL - TMS3401 - L08M.doc 2012 R.Dokument17 SeitenGL - TMS3401 - L08M.doc 2012 R.Juanfrancisco Rojas OlivaresNoch keine Bewertungen
- Motores MarinosDokument10 SeitenMotores MarinosdarkevildemonzxNoch keine Bewertungen
- Motores Neumaticos e HidraulicosDokument17 SeitenMotores Neumaticos e HidraulicosVICTOR DAVID MONTENEGRO RODRIGUEZNoch keine Bewertungen
- Par Motor TopicosDokument3 SeitenPar Motor TopicosSegundo GarcesNoch keine Bewertungen
- A8.equipo 3Dokument17 SeitenA8.equipo 3mariana sandovalNoch keine Bewertungen
- Documento MotorDokument6 SeitenDocumento MotorÎvëř ŠăňtāňdëřNoch keine Bewertungen
- Transmisión MecánicaDokument16 SeitenTransmisión MecánicaJuan Francisco Castillo SaavedraNoch keine Bewertungen
- Variación de Velocidad Por Cambio de Tensión y FrecuenciaDokument4 SeitenVariación de Velocidad Por Cambio de Tensión y FrecuenciaLuis Felipe ManzanoNoch keine Bewertungen
- T Espel 0166 PDFDokument182 SeitenT Espel 0166 PDFMax Benz Andres Jak0% (1)
- Propulsión automotrizDokument6 SeitenPropulsión automotrizCarlos Gulbenkian GaldamesNoch keine Bewertungen
- Curvas Caracteristicas de Un MotorDokument18 SeitenCurvas Caracteristicas de Un MotorLuis Carlos V. Pintado100% (1)
- Informe Con ConclusionDokument22 SeitenInforme Con ConclusionRomina Perez RapuNoch keine Bewertungen
- Laboratorio de Motores FIMDokument29 SeitenLaboratorio de Motores FIMJhoan Jose Tito Aurora0% (1)
- Grupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasDokument6 SeitenGrupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasJairo TivantaNoch keine Bewertungen
- Motores Neumaticos e HidraulicosDokument17 SeitenMotores Neumaticos e HidraulicosVICTOR DAVID MONTENEGRO RODRIGUEZNoch keine Bewertungen
- Potencia y Par Motor. Cadena CinemáticaDokument17 SeitenPotencia y Par Motor. Cadena CinemáticaAlex FarfánNoch keine Bewertungen
- VALORIZACIONDokument10 SeitenVALORIZACIONelmer4720_201260464Noch keine Bewertungen
- Jornal Actualizado PDFDokument1 SeiteJornal Actualizado PDFelmer4720_201260464Noch keine Bewertungen
- Linares TriqueroDokument18 SeitenLinares Triqueroelmer4720_201260464Noch keine Bewertungen
- Preguntas ... Fiscal 1Dokument1 SeitePreguntas ... Fiscal 1elmer4720_201260464Noch keine Bewertungen
- Presentacion Cap - II El TransporteDokument44 SeitenPresentacion Cap - II El TransporteJosecarlos JairNoch keine Bewertungen
- GFDGDFDokument2 SeitenGFDGDFelmer4720_201260464Noch keine Bewertungen
- Particas ProfesionealesDokument1 SeiteParticas Profesionealeselmer4720_201260464Noch keine Bewertungen
- Tema 6 Gestion Tecnica Trafico-Rev-2013Dokument30 SeitenTema 6 Gestion Tecnica Trafico-Rev-2013tunelsonNoch keine Bewertungen
- PasteurizacionDokument2 SeitenPasteurizacionelmer4720_201260464Noch keine Bewertungen
- Costos PortadaDokument2 SeitenCostos Portadaelmer4720_201260464Noch keine Bewertungen
- Presentación 3Dokument1 SeitePresentación 3elmer4720_201260464Noch keine Bewertungen
- 1.silabo Instalaciones Sanitarias 2015 - 1Dokument9 Seiten1.silabo Instalaciones Sanitarias 2015 - 1elmer4720_201260464Noch keine Bewertungen
- AsasDokument5 SeitenAsaselmer4720_201260464Noch keine Bewertungen
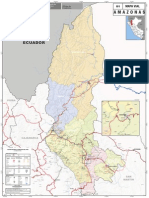
- Amazonas PDFDokument1 SeiteAmazonas PDFelmer4720_201260464Noch keine Bewertungen
- Semana 5 y 6 IAOC PDFDokument56 SeitenSemana 5 y 6 IAOC PDFelmer4720_201260464Noch keine Bewertungen
- Semana 5 y 6 IAOC PDFDokument56 SeitenSemana 5 y 6 IAOC PDFelmer4720_201260464Noch keine Bewertungen
- Semana 1 IAOCDokument36 SeitenSemana 1 IAOCJhony Quiliche VasquezNoch keine Bewertungen
- Recomendaciones para Diseño Geométrico PDFDokument0 SeitenRecomendaciones para Diseño Geométrico PDFelmer4720_201260464Noch keine Bewertungen
- To Nacional de VehiculosDokument119 SeitenTo Nacional de VehiculosIng Arturo Rodríguez SerquénNoch keine Bewertungen
- Semana 2 IAOC PDFDokument3 SeitenSemana 2 IAOC PDFelmer4720_201260464Noch keine Bewertungen
- TASACIONESDokument11 SeitenTASACIONESelmer4720_201260464Noch keine Bewertungen
- Volumen 3, Metrados PDFDokument94 SeitenVolumen 3, Metrados PDFelmer4720_201260464Noch keine Bewertungen
- Memoria Descriptiva de Vivienda UnifamiliarDokument7 SeitenMemoria Descriptiva de Vivienda Unifamiliarelmer4720_201260464100% (1)
- ESPIRALDokument7 SeitenESPIRALelmer4720_201260464Noch keine Bewertungen
- EncofradosDokument36 SeitenEncofradoselmer4720_201260464Noch keine Bewertungen
- Calculo de DensidadDokument2 SeitenCalculo de Densidadelmer4720_201260464Noch keine Bewertungen
- EDokument3 SeitenEelmer4720_201260464Noch keine Bewertungen
- Sistema Pitot Cessna CenturionDokument8 SeitenSistema Pitot Cessna CenturionLina VelasquezNoch keine Bewertungen
- Combustión Del Alcohol EtílicoDokument14 SeitenCombustión Del Alcohol EtílicoDanyta Jimenez VergaraNoch keine Bewertungen
- Angela Galindo - Taller ReactoresDokument11 SeitenAngela Galindo - Taller ReactoresAngela GalindoNoch keine Bewertungen
- Presentacion de Cañeria Guia-LodosDokument24 SeitenPresentacion de Cañeria Guia-LodosLucia MoyanoNoch keine Bewertungen
- 2017 II-Trabajo01 SistLogDokument3 Seiten2017 II-Trabajo01 SistLogPaúlEduardoCervantesParvinaNoch keine Bewertungen
- S4 SOL Derivadas ParametricasDokument6 SeitenS4 SOL Derivadas ParametricasDiego ZumaránNoch keine Bewertungen
- Diagrama de Procesos (Agro)Dokument20 SeitenDiagrama de Procesos (Agro)Lean Solano Mendoza100% (2)
- OGUCDokument147 SeitenOGUCGuillermo RamirezNoch keine Bewertungen
- TemporizadorDokument6 SeitenTemporizadorYhordan Smith Larico SanchezNoch keine Bewertungen
- AntenasDokument70 SeitenAntenasAlejandra CardenasNoch keine Bewertungen
- Catalogo 25 AbrilDokument44 SeitenCatalogo 25 AbrilfranciscaNoch keine Bewertungen
- Generalidades ClioDokument123 SeitenGeneralidades ClioAngel GenissansNoch keine Bewertungen
- Inversa de Una Matriz en C++Dokument4 SeitenInversa de Una Matriz en C++Alfredo ProañoNoch keine Bewertungen
- SC002080 Manual VE1Dokument396 SeitenSC002080 Manual VE1Juan Manuel PresaNoch keine Bewertungen
- Propiedad IntelectualDokument61 SeitenPropiedad IntelectualAllimacse ReivajNoch keine Bewertungen
- Historia Del SAPDokument3 SeitenHistoria Del SAPmiguelvassoNoch keine Bewertungen
- Visión y Alcance ProyectoDokument11 SeitenVisión y Alcance Proyectogniter10Noch keine Bewertungen
- Investigación de PuentesDokument9 SeitenInvestigación de PuentesAndre RomoNoch keine Bewertungen
- RICOH Pro5100s PDFDokument8 SeitenRICOH Pro5100s PDFquiquescribdNoch keine Bewertungen
- Informe de Laboratorio N°1 UPBDokument5 SeitenInforme de Laboratorio N°1 UPBpabloNoch keine Bewertungen
- Rect No ControladosDokument11 SeitenRect No ControladosAlexander ValenciaNoch keine Bewertungen
- Trabajo de Gestión de Tecnologías IndustrialesDokument13 SeitenTrabajo de Gestión de Tecnologías IndustrialesCamila LozadaNoch keine Bewertungen