Das könnte Ihnen auch gefallen
- Programming in The OSEK-VDX Environment (With CD-ROM)Dokument385 SeitenProgramming in The OSEK-VDX Environment (With CD-ROM)Sreedhar PathaNoch keine Bewertungen
- VTESTstudio ConceptManual enDokument48 SeitenVTESTstudio ConceptManual enAntonio li causi50% (2)
- An-Ind-1-007 Using Matlab With CanoeDokument15 SeitenAn-Ind-1-007 Using Matlab With CanoeCoolboy RoadsterNoch keine Bewertungen
- Process Knowledge: Test Case Design TechniquesDokument2 SeitenProcess Knowledge: Test Case Design TechniquesShivakumar KunnurNoch keine Bewertungen
- CaplDokument4 SeitenCaplRajesh Kumar RNoch keine Bewertungen
- Compiler (Very Imp.)Dokument10 SeitenCompiler (Very Imp.)Saleh TarekNoch keine Bewertungen
- An IND 1 016 Using LXI Devices in CANoeDokument6 SeitenAn IND 1 016 Using LXI Devices in CANoeWolfgang StarkmannNoch keine Bewertungen
- Advanced PointerDokument11 SeitenAdvanced PointerStoriesofsuperheroesNoch keine Bewertungen
- Analog Devices, Inc. Protocol 6 Flash/Ee Programming Via Lin Downloading Software With Canoe - LinDokument16 SeitenAnalog Devices, Inc. Protocol 6 Flash/Ee Programming Via Lin Downloading Software With Canoe - LinUpendra VaddeNoch keine Bewertungen
- VeCo12 3 Diagnostics 1 Geffers Lecture PDFDokument24 SeitenVeCo12 3 Diagnostics 1 Geffers Lecture PDFGraciella Valeria Viana100% (1)
- Canalyzer: Product InformationDokument31 SeitenCanalyzer: Product InformationSashank100% (1)
- CAPLDokument33 SeitenCAPLtarakram2809Noch keine Bewertungen
- Autosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonDokument55 SeitenAutosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonXuân ToànNoch keine Bewertungen
- Diagnostic Communication Manager Module in AUTOSARDokument7 SeitenDiagnostic Communication Manager Module in AUTOSARShyam Bhat100% (1)
- Emaus Vector Canoe SlidesDokument12 SeitenEmaus Vector Canoe SlidesvlsishekarNoch keine Bewertungen
- AUTOSAR SWS DiagnosticCommunicationManager PDFDokument553 SeitenAUTOSAR SWS DiagnosticCommunicationManager PDFyuvarajnarayanasamyNoch keine Bewertungen
- XCP ReferenceBookDokument116 SeitenXCP ReferenceBookSathish SrinivasanNoch keine Bewertungen
- Simulink-Targetlink Datatypes Defnt ProblemDokument16 SeitenSimulink-Targetlink Datatypes Defnt ProblemmonisivaNoch keine Bewertungen
- Arm Instruction SetDokument61 SeitenArm Instruction SetswatidasNoch keine Bewertungen
- Security and Safety in Embedded ApplicationsDokument14 SeitenSecurity and Safety in Embedded ApplicationsLinh Lê QuangNoch keine Bewertungen
- CANalyzer - Canopen DataSheet enDokument4 SeitenCANalyzer - Canopen DataSheet enFerdinand VelokurckiNoch keine Bewertungen
- VIPT LINFUNK eDokument1 SeiteVIPT LINFUNK eRosen RusevNoch keine Bewertungen
- 4-14 - p18 - Tips-And-Tricks-For-The-Use-Of-Capl-Part 3 - Lobmeyer - MarktlDokument4 Seiten4-14 - p18 - Tips-And-Tricks-For-The-Use-Of-Capl-Part 3 - Lobmeyer - MarktlMohammad FaizanNoch keine Bewertungen
- XCP Pro User ManualDokument64 SeitenXCP Pro User ManualdataromaNoch keine Bewertungen
- Arccore User Documentation For Autosar 4.X ProductsDokument54 SeitenArccore User Documentation For Autosar 4.X ProductsJanahvi JanardhanNoch keine Bewertungen
- Vector CANoeDokument7 SeitenVector CANoeZaferNoch keine Bewertungen
- An and 1 118 Canoe Tfs TutorialDokument47 SeitenAn and 1 118 Canoe Tfs TutorialAndra Groza-Radu100% (1)
- CANalyzer Workshops Overview FactSheet enDokument2 SeitenCANalyzer Workshops Overview FactSheet enPrasad GNoch keine Bewertungen
- BootLoader I2C MSP430Dokument37 SeitenBootLoader I2C MSP430Hernan Düssan50% (2)
- SN IND 1 011 - InteractionLayerDokument10 SeitenSN IND 1 011 - InteractionLayerVishnu R Nair100% (1)
- CANoe ProductInformation enDokument43 SeitenCANoe ProductInformation enMuresan75% (4)
- CANLabDokument6 SeitenCANLabSonny SoodNoch keine Bewertungen
- PMCL Index 2015 11 - Real-Time Operating SystemsDokument32 SeitenPMCL Index 2015 11 - Real-Time Operating SystemsshilgiriNoch keine Bewertungen
- dSPACENews2006-3 AutomationDesk en Pn422Dokument2 SeitendSPACENews2006-3 AutomationDesk en Pn422TYu4443Noch keine Bewertungen
- CAPL 3 CANNewsletter 201411 PressArticle enDokument2 SeitenCAPL 3 CANNewsletter 201411 PressArticle endaourdiopNoch keine Bewertungen
- Data Sheet ECU-TESTDokument2 SeitenData Sheet ECU-TESTmeetbalakumarNoch keine Bewertungen
- Diagnosis For in Vehicle NetworksDokument26 SeitenDiagnosis For in Vehicle NetworksSayyedNoch keine Bewertungen
- DSPACE Catalog2016 E WebDokument622 SeitenDSPACE Catalog2016 E WebYonas GhiwotNoch keine Bewertungen
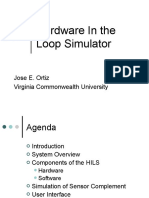
- Hardware in The Loop SimulatorDokument40 SeitenHardware in The Loop SimulatortrojanbkNoch keine Bewertungen
- An-InD-1-001 CANoe CANalyzer As Diagnostic ToolsDokument31 SeitenAn-InD-1-001 CANoe CANalyzer As Diagnostic ToolsAnoopNoch keine Bewertungen
- Autosar Practical ApplicationDokument135 SeitenAutosar Practical ApplicationohmprakashNoch keine Bewertungen
- Message Authentication For Can Bus and Autosar Software ArchitectureDokument135 SeitenMessage Authentication For Can Bus and Autosar Software ArchitecturebitzabladeNoch keine Bewertungen
- Dspace 2Dokument304 SeitenDspace 2Sagar JoshiNoch keine Bewertungen
- Install - Guide - Lines For MatlabDokument3 SeitenInstall - Guide - Lines For MatlabNagabhushanam KoduriNoch keine Bewertungen
- CANoe ProductInformation ENDokument57 SeitenCANoe ProductInformation ENpawan waghNoch keine Bewertungen
- CAN QuestionsDokument4 SeitenCAN QuestionsSaikiran Bolla100% (1)
- Ecu TestDokument3 SeitenEcu TestmeetbalakumarNoch keine Bewertungen
- Unit 4 SystemDesk 4Dokument10 SeitenUnit 4 SystemDesk 4Farwa ZahidNoch keine Bewertungen
- Mil Sil Pil HilDokument6 SeitenMil Sil Pil HilPk0% (1)
- MATLAB dSPACEDokument134 SeitenMATLAB dSPACEemanuelg902Noch keine Bewertungen
- Com Stack Configuration PDFDokument99 SeitenCom Stack Configuration PDFkakathi100% (1)
- CANoe Matlab 2Dokument5 SeitenCANoe Matlab 2jgkkkNoch keine Bewertungen
- UDS Protocol Implementation in Automotiv PDFDokument6 SeitenUDS Protocol Implementation in Automotiv PDFMinhaj NaimNoch keine Bewertungen
- CAPL CheatSheetDokument3 SeitenCAPL CheatSheetemilfrancu100% (2)
- Lesson19 Autosar PDFDokument170 SeitenLesson19 Autosar PDFBura RoxanaNoch keine Bewertungen
- Simulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsDokument6 SeitenSimulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsVijayalaxmi BiradarNoch keine Bewertungen
- AUTomotive Open System ARchitecture A Complete Guide - 2020 EditionVon EverandAUTomotive Open System ARchitecture A Complete Guide - 2020 EditionNoch keine Bewertungen
- Cosmic EnergyDokument1 SeiteCosmic EnergyaustinvishalNoch keine Bewertungen
- Customization of Sport Accessories/equipment Through Additive Manufacturing Brief SummaryDokument4 SeitenCustomization of Sport Accessories/equipment Through Additive Manufacturing Brief SummaryaustinvishalNoch keine Bewertungen
- Mapletut 2Dokument145 SeitenMapletut 2bogo_bogdanNoch keine Bewertungen
- Thesis OverviewDokument19 SeitenThesis OverviewaustinvishalNoch keine Bewertungen
- MMM Exam Topics 5 December 2014Dokument1 SeiteMMM Exam Topics 5 December 2014austinvishalNoch keine Bewertungen
- Using Matlab To Animate The Generation of A Space Centrode in Kinematics PDFDokument10 SeitenUsing Matlab To Animate The Generation of A Space Centrode in Kinematics PDFaustinvishalNoch keine Bewertungen
- Mechanisms and MachinesDokument4 SeitenMechanisms and MachinesaustinvishalNoch keine Bewertungen
- Line Vectors (Page 2)Dokument2 SeitenLine Vectors (Page 2)austinvishalNoch keine Bewertungen
- Student Handbook EMARO1!13!14Dokument30 SeitenStudent Handbook EMARO1!13!14austinvishalNoch keine Bewertungen
- Autonomous and Mobile Robotics: Prof. Giuseppe OrioloDokument16 SeitenAutonomous and Mobile Robotics: Prof. Giuseppe OrioloaustinvishalNoch keine Bewertungen
- Metodo La SecanteDokument5 SeitenMetodo La Secantev3imotNoch keine Bewertungen
- EMARO ARIA ConceptualDesign CARO StephaneDokument196 SeitenEMARO ARIA ConceptualDesign CARO StephaneaustinvishalNoch keine Bewertungen
- Hapter2 Direct KinematicsDokument43 SeitenHapter2 Direct KinematicsaustinvishalNoch keine Bewertungen
- 24 Feedback LinearizationDokument17 Seiten24 Feedback LinearizationaustinvishalNoch keine Bewertungen
- Symoro RoboticaDokument21 SeitenSymoro RoboticaaustinvishalNoch keine Bewertungen
- Report Navigation Prashanth RamadossDokument1 SeiteReport Navigation Prashanth RamadossaustinvishalNoch keine Bewertungen
- 03 2013-10-14 ScrewTheoryDokument8 Seiten03 2013-10-14 ScrewTheoryaustinvishalNoch keine Bewertungen
- MOBRO Localisation SlidesDokument106 SeitenMOBRO Localisation SlidesaustinvishalNoch keine Bewertungen
- Robo Analyzer User ManualDokument20 SeitenRobo Analyzer User ManualaustinvishalNoch keine Bewertungen
- Complete Kinematic Analysis of 3rpsDokument10 SeitenComplete Kinematic Analysis of 3rpsaustinvishalNoch keine Bewertungen
- Robo Analyzer User ManualDokument20 SeitenRobo Analyzer User ManualaustinvishalNoch keine Bewertungen
- WheeledKinematicsusing MatlabDokument4 SeitenWheeledKinematicsusing MatlabaustinvishalNoch keine Bewertungen
- Humanoid Modeling Open GLDokument12 SeitenHumanoid Modeling Open GLaustinvishalNoch keine Bewertungen
- Moderncontroltheory BakshiDokument386 SeitenModerncontroltheory Bakshivartanami100% (3)
- OSEK ProgrammingDokument105 SeitenOSEK ProgrammingaustinvishalNoch keine Bewertungen
- Osek Os: Session Speaker Deepak VDokument60 SeitenOsek Os: Session Speaker Deepak VDaour DiopNoch keine Bewertungen
- Investigation of Real-Time Operating - OSEK and Rubus PDFDokument50 SeitenInvestigation of Real-Time Operating - OSEK and Rubus PDFAnhNoch keine Bewertungen
- Diss SchwarzDokument130 SeitenDiss SchwarzMohamed AdelNoch keine Bewertungen
- Autosar NotesDokument10 SeitenAutosar NotesSri RamNoch keine Bewertungen
- How To Migrate From Osek/Vdx To AutosarDokument2 SeitenHow To Migrate From Osek/Vdx To AutosarMarius Cristian CapatinaNoch keine Bewertungen
- 05 EcusDokument27 Seiten05 EcusJavier100% (3)
- OSEKOSDokument85 SeitenOSEKOSmarris09Noch keine Bewertungen
- PdfF8AE TMPDokument156 SeitenPdfF8AE TMPdumass27Noch keine Bewertungen
- OSEKDokument86 SeitenOSEKrsarun999Noch keine Bewertungen
- Autosar Os NewDokument40 SeitenAutosar Os NewNandini0% (1)
- Autosar SWS Os PDFDokument247 SeitenAutosar SWS Os PDFyuvarajnarayanasamyNoch keine Bewertungen
- RTA-OS3.0 Reference GuideDokument321 SeitenRTA-OS3.0 Reference Guideciwic85343Noch keine Bewertungen
- Osek Users ManualDokument13 SeitenOsek Users ManualKhan ShaadNoch keine Bewertungen
- Real Time Operating Systems Unit-3Dokument14 SeitenReal Time Operating Systems Unit-3duddala1srikanthNoch keine Bewertungen
- Real Time Operating Systems Unit-3Dokument14 SeitenReal Time Operating Systems Unit-3duddala1srikanthNoch keine Bewertungen