Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Calculate Kanban requirementsDokument2 SeitenCalculate Kanban requirementsprabhuNoch keine Bewertungen
- GRC Fiori End User Guide Final - V2Dokument75 SeitenGRC Fiori End User Guide Final - V2Subhash BharmappaNoch keine Bewertungen
- Dry Hands MinecraftDokument1 SeiteDry Hands MinecraftBrandon RotzankNoch keine Bewertungen
- KSB Megaflow V: Pumps For Sewage, Effuents and MisturesDokument18 SeitenKSB Megaflow V: Pumps For Sewage, Effuents and MisturesKorneliusNoch keine Bewertungen
- Builder's Greywater Guide Branched DrainDokument4 SeitenBuilder's Greywater Guide Branched DrainGreen Action Sustainable Technology GroupNoch keine Bewertungen
- 3HAC16580-1 Revf enDokument232 Seiten3HAC16580-1 Revf enSusheel ShuklaNoch keine Bewertungen
- 26111Dokument8 Seiten26111Susheel ShuklaNoch keine Bewertungen
- White Paper SafemoveDokument45 SeitenWhite Paper SafemoveSusheel ShuklaNoch keine Bewertungen
- The Three Dangers To India Indian Defence ReviewDokument3 SeitenThe Three Dangers To India Indian Defence ReviewSusheel ShuklaNoch keine Bewertungen
- 3HAC18153-1 RevB enDokument44 Seiten3HAC18153-1 RevB enSusheel ShuklaNoch keine Bewertungen
- LSPGDokument12 SeitenLSPGSusheel ShuklaNoch keine Bewertungen
- 3HAC18152-1 RevB enDokument70 Seiten3HAC18152-1 RevB enSusheel ShuklaNoch keine Bewertungen
- 3HAC18154-1 RevE enDokument112 Seiten3HAC18154-1 RevE enSusheel ShuklaNoch keine Bewertungen
- 3HAC020435-001 Revd enDokument76 Seiten3HAC020435-001 Revd enSusheel ShuklaNoch keine Bewertungen
- 3HAC029338-001 Rev - enDokument38 Seiten3HAC029338-001 Rev - enSusheel ShuklaNoch keine Bewertungen
- Triple Whammy - Terrorist Threat To South India Indian Defence ReviewDokument3 SeitenTriple Whammy - Terrorist Threat To South India Indian Defence ReviewSusheel ShuklaNoch keine Bewertungen
- LSPGDokument70 SeitenLSPGSusheel ShuklaNoch keine Bewertungen
- Instruction Manual - Inverse DynamicsDokument1 SeiteInstruction Manual - Inverse DynamicsSusheel ShuklaNoch keine Bewertungen
- E News#26eDokument1 SeiteE News#26eSusheel ShuklaNoch keine Bewertungen
- SSC CHSLE-2013 Draft NoticeDokument32 SeitenSSC CHSLE-2013 Draft NoticePabitra KumarNoch keine Bewertungen
- Maruti Suzuki Threatens To Shut Down Manesaru PlantDokument2 SeitenMaruti Suzuki Threatens To Shut Down Manesaru PlantSusheel ShuklaNoch keine Bewertungen
- Tonnage Cal. For ToolDokument2 SeitenTonnage Cal. For ToolSusheel ShuklaNoch keine Bewertungen
- SamDokument73 SeitenSamSusheel ShuklaNoch keine Bewertungen
- Fundamentals of Human GeographyDokument12 SeitenFundamentals of Human GeographySusheel ShuklaNoch keine Bewertungen
- Bokaro SteelDokument3 SeitenBokaro SteelLaksh ManNoch keine Bewertungen
- Part Managemet Sheet 0712Dokument16 SeitenPart Managemet Sheet 0712Susheel ShuklaNoch keine Bewertungen
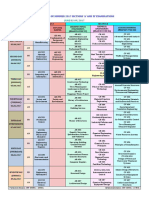
- Programme of Summer 2017 Sections A' and B' Examinations: JUNE 03-09, 2017Dokument3 SeitenProgramme of Summer 2017 Sections A' and B' Examinations: JUNE 03-09, 2017Anurag PandeyNoch keine Bewertungen
- Home Budget CalculatorDokument2 SeitenHome Budget CalculatorSusheel ShuklaNoch keine Bewertungen
- Calculation of Hourly Rate For Laser Cutting Machine - 500W Input of Data Calculations. Yearly Work Capacity 4800Dokument2 SeitenCalculation of Hourly Rate For Laser Cutting Machine - 500W Input of Data Calculations. Yearly Work Capacity 4800Susheel ShuklaNoch keine Bewertungen
- RFQ Cost Breakdown HUSQVARNA PartsDokument2 SeitenRFQ Cost Breakdown HUSQVARNA PartsSusheel ShuklaNoch keine Bewertungen
- College Student Budget Calculator - Plan FinancesDokument4 SeitenCollege Student Budget Calculator - Plan FinancesSusheel ShuklaNoch keine Bewertungen
- EbbillDokument2 SeitenEbbillSuresh PrabhuNoch keine Bewertungen
- Weld Cost Calc XLDokument10 SeitenWeld Cost Calc XLSusheel ShuklaNoch keine Bewertungen
- Performance Estimation of Ofdm-Wimax Network: Vishal Sharma & Navneet KaurDokument8 SeitenPerformance Estimation of Ofdm-Wimax Network: Vishal Sharma & Navneet KaurTJPRC PublicationsNoch keine Bewertungen
- Damage To Stern Tube Bearing and SealsDokument4 SeitenDamage To Stern Tube Bearing and SealsJoão Henrique Volpini MattosNoch keine Bewertungen
- DS450 Shop Manual (Prelim)Dokument94 SeitenDS450 Shop Manual (Prelim)GuruRacerNoch keine Bewertungen
- L04-L05 Parts 13-25-550 v05 42021Dokument84 SeitenL04-L05 Parts 13-25-550 v05 42021Brandi HillNoch keine Bewertungen
- Newsletter Template NewDokument4 SeitenNewsletter Template Newapi-458544253Noch keine Bewertungen
- Human Plus Machine A New Era of Automation in ManufacturingDokument8 SeitenHuman Plus Machine A New Era of Automation in ManufacturingDuarte CRosaNoch keine Bewertungen
- Auto BestBuys MAKATI CITY September ListingDokument5 SeitenAuto BestBuys MAKATI CITY September ListingWill GeronaNoch keine Bewertungen
- Sitsyll PDFDokument57 SeitenSitsyll PDFpreranaNoch keine Bewertungen
- Slurry Flo BrochureDokument4 SeitenSlurry Flo BrochureChristian Andres Campa HernandezNoch keine Bewertungen
- 0 EDEM Applications MeDokument16 Seiten0 EDEM Applications MeRuben PurcaNoch keine Bewertungen
- P108Dokument1 SeiteP108teban09Noch keine Bewertungen
- CV Summary for IT Position Seeking Recent GraduateDokument5 SeitenCV Summary for IT Position Seeking Recent Graduateeang barangNoch keine Bewertungen
- Conceptual Design Deliverables Latest Rev2Dokument14 SeitenConceptual Design Deliverables Latest Rev2dhanu_lagwankarNoch keine Bewertungen
- Excel Dashboard WidgetsDokument47 SeitenExcel Dashboard WidgetskhincowNoch keine Bewertungen
- PLCDokument16 SeitenPLCMohit Kinger100% (1)
- Multi-Door Compact Type Controller (V4A) - Multi-Door Controller - ACS - SYRIS Technology Corp. (The RFID Total Solution.) - Powered by SYRISDokument2 SeitenMulti-Door Compact Type Controller (V4A) - Multi-Door Controller - ACS - SYRIS Technology Corp. (The RFID Total Solution.) - Powered by SYRISSusheel GuptaNoch keine Bewertungen
- Infantry WeaponsDokument61 SeitenInfantry WeaponsKaran SahotaNoch keine Bewertungen
- POSSIBILITIES OF LOW VOLTAGE DC SYSTEMSDokument10 SeitenPOSSIBILITIES OF LOW VOLTAGE DC SYSTEMSTTaanNoch keine Bewertungen
- Grade 6 Science PuzzleDokument4 SeitenGrade 6 Science Puzzlemargie riveraNoch keine Bewertungen
- Hughes Brothers PDFDokument52 SeitenHughes Brothers PDFJavier MaldonadoNoch keine Bewertungen
- CSE 390 Bash Command ReferenceDokument3 SeitenCSE 390 Bash Command Referencesam100% (1)
- Powerful Cooling and Easy Installation For Really Large SpacesDokument4 SeitenPowerful Cooling and Easy Installation For Really Large Spacesalkaf08Noch keine Bewertungen
- Mechanical Engineer Resume - Digambar BhangeDokument3 SeitenMechanical Engineer Resume - Digambar BhangeTOP DHAMAKANoch keine Bewertungen
- G12gasa Group5 PR2Dokument7 SeitenG12gasa Group5 PR2Lizley CordovaNoch keine Bewertungen
- Teradata Version DifferencesDokument3 SeitenTeradata Version DifferencesShambuReddy100% (1)
- Cybersecurity-Student-Book Res Eng 1014Dokument38 SeitenCybersecurity-Student-Book Res Eng 1014Nistor Andreea Maria100% (1)