Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Electric Motor and Its ApplicationsDokument336 SeitenThe Electric Motor and Its ApplicationsRommel100% (1)
- Yale Global King - Shaw-Box World Series Wire Rope Hoist - 5 To 15 Ton V3Dokument64 SeitenYale Global King - Shaw-Box World Series Wire Rope Hoist - 5 To 15 Ton V3JulValdi100% (1)
- Public TransportDokument13 SeitenPublic TransportAan Hariansyah AanNoch keine Bewertungen
- Cantilever Calculation ToolDokument10 SeitenCantilever Calculation ToolEnoch Twumasi50% (2)
- Bergen Light Rail PDFDokument60 SeitenBergen Light Rail PDFFerry TriwahyudiNoch keine Bewertungen
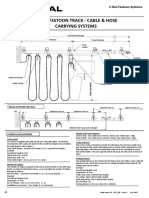
- C Rail Festoon Track Cable & Hose Carrying SystemsDokument6 SeitenC Rail Festoon Track Cable & Hose Carrying SystemsJavier VasquezNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part19Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part19linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part17Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part17linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part21Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part21linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part22Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part22linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part20Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part20linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part14Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part14linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part12Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part12linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part18Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part18linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part13Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part13linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part23Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part23linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part15Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part15linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part16Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part16linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part7Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part7linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part9Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part9linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part10Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part10linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part4Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part4linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part68Dokument2 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part68linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part8Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part8linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part6Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part6linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part2Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part2linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part11Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part11linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part1Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part1linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part61Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part61linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part5Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part5linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part67Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part67linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part3Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part3linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part66Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part66linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part65Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part65linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part60Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part60linghuchongNoch keine Bewertungen
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part59Dokument4 SeitenProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part59linghuchongNoch keine Bewertungen
- Lista Material RodanteDokument119 SeitenLista Material RodantePaco PerezNoch keine Bewertungen
- Stinger Technical SpecificationDokument8 SeitenStinger Technical Specificationrickbushido100% (1)
- A Practical Guide To Academic Writing For International StudentsDokument9 SeitenA Practical Guide To Academic Writing For International StudentsIncubateur UmabNoch keine Bewertungen
- Standard Lifting Equipment Product CatalogDokument23 SeitenStandard Lifting Equipment Product Catalogk.m.ariful islamNoch keine Bewertungen
- Instruction and Maintenance Manual New UnitrayDokument67 SeitenInstruction and Maintenance Manual New Unitrayabdulkader8dawalibiNoch keine Bewertungen
- Electric Chain Hoists and Trolleys GuideDokument17 SeitenElectric Chain Hoists and Trolleys Guidesravan thumojuNoch keine Bewertungen
- Summary and Main Idea Worksheet 1Dokument2 SeitenSummary and Main Idea Worksheet 1api-264850714100% (1)
- Combino BudapestDokument4 SeitenCombino BudapestGIUSEPPE SCALESENoch keine Bewertungen
- Emails-06252019 9853381Dokument432 SeitenEmails-06252019 9853381Ali Ghani100% (1)
- See Jesús Mirás-AraujoDokument19 SeitenSee Jesús Mirás-AraujoGalo GonzálezNoch keine Bewertungen
- CM Extra Pricing XTRA 0211Dokument39 SeitenCM Extra Pricing XTRA 0211Steve GallagherNoch keine Bewertungen
- Translohr - Brochure - EnglishDokument8 SeitenTranslohr - Brochure - EnglishLuca Marius CristianNoch keine Bewertungen
- VicRoads Restraint GuideDokument36 SeitenVicRoads Restraint Guidevahur_s100% (1)
- Alstom Transport PresentationDokument20 SeitenAlstom Transport PresentationmarioerasureNoch keine Bewertungen
- Transportation Engineering GuideDokument108 SeitenTransportation Engineering GuideTricia Claire BarraquioNoch keine Bewertungen
- Bus & Cable Car Simulator – San Francisco Gameplay GuideDokument39 SeitenBus & Cable Car Simulator – San Francisco Gameplay GuideDanialNoch keine Bewertungen
- Metro Mythology 08Dokument21 SeitenMetro Mythology 08shriyaNoch keine Bewertungen
- Cities in Motion ManualDokument48 SeitenCities in Motion ManualTimothy ChengNoch keine Bewertungen
- Transportation in 1920s and 1930sDokument20 SeitenTransportation in 1920s and 1930sAlberto Psicodelix50% (2)
- Operation, Service & Parts Manual: Wire Rope Electric HoistsDokument44 SeitenOperation, Service & Parts Manual: Wire Rope Electric HoistsLuis Eduardo Arellano HernandezNoch keine Bewertungen
- Adjustable Stair-Climbing Trolley for Load TransportDokument19 SeitenAdjustable Stair-Climbing Trolley for Load Transportaniket patil100% (1)
- CE 567 Public Mass Transportation: Course ContentsDokument148 SeitenCE 567 Public Mass Transportation: Course ContentsEng Muhammad Afzal AlmaniNoch keine Bewertungen
- BOP Winch Product ManualDokument14 SeitenBOP Winch Product ManualAlecs NedeaNoch keine Bewertungen
- CV Dan Robert Ciuraru - CV - Eng PDFDokument4 SeitenCV Dan Robert Ciuraru - CV - Eng PDFAnonymous 6rzmzq4Noch keine Bewertungen