Das könnte Ihnen auch gefallen
- Spacecraft Dynamics and Control: The Embedded Model Control ApproachVon EverandSpacecraft Dynamics and Control: The Embedded Model Control ApproachBewertung: 5 von 5 Sternen5/5 (1)
- Formation Flying: A Subject Being Fast Unfolding in Space: Wang Xiang, John Leif JorgensenDokument5 SeitenFormation Flying: A Subject Being Fast Unfolding in Space: Wang Xiang, John Leif JorgensenebookscribdNoch keine Bewertungen
- Sliding Mode Control TechniquesDokument6 SeitenSliding Mode Control TechniquesSyed Zain BukhariNoch keine Bewertungen
- Planning and replanning agile Earth observation satellitesDokument8 SeitenPlanning and replanning agile Earth observation satellitesFra LazzoNoch keine Bewertungen
- Heba ElKholy Thesis S2014Dokument13 SeitenHeba ElKholy Thesis S2014AlexandraAndreeaNoch keine Bewertungen
- A Stratospheric Balloon GNSS-R Experiment: The Cat-2 Project in DLR/SNSB BexusDokument4 SeitenA Stratospheric Balloon GNSS-R Experiment: The Cat-2 Project in DLR/SNSB BexusamruthanarayananNoch keine Bewertungen
- (Preprint) AAS 18-290: Brian Gaudet, Richard Linares, and Roberto FurfaroDokument19 Seiten(Preprint) AAS 18-290: Brian Gaudet, Richard Linares, and Roberto FurfaroVahid AtaeiNoch keine Bewertungen
- Cubesat Deformable Mirror Demonstration: CitationDokument12 SeitenCubesat Deformable Mirror Demonstration: CitationjonNoch keine Bewertungen
- GOCE System Critical Design ReviewDokument33 SeitenGOCE System Critical Design ReviewFlavioNoch keine Bewertungen
- Article-Quantitative Evaluation of The Landing SystemsDokument203 SeitenArticle-Quantitative Evaluation of The Landing SystemsNguyễnXuânLêCươngNoch keine Bewertungen
- UAV GNC Chapter PDFDokument30 SeitenUAV GNC Chapter PDFMrZaggyNoch keine Bewertungen
- V. N. Kazantsev, Reshetnev, A. Kozlov, V.E Cheremisin: and Design of The Glqnass SystemDokument10 SeitenV. N. Kazantsev, Reshetnev, A. Kozlov, V.E Cheremisin: and Design of The Glqnass SystemGayathri SrinivasaNoch keine Bewertungen
- Penentuan Orientasi Dan Translasi Gerakan UAV Menggunakan Data Fusion Berbasis Kalman FilterDokument17 SeitenPenentuan Orientasi Dan Translasi Gerakan UAV Menggunakan Data Fusion Berbasis Kalman FilterFreddy KurniawanNoch keine Bewertungen
- Displacement Estimation and Tracking of Quadrotor UAV in Dynamic MotionDokument11 SeitenDisplacement Estimation and Tracking of Quadrotor UAV in Dynamic MotionFreddy KurniawanNoch keine Bewertungen
- Attitude Control by Magnetic Torquer: Advances in The Astronautical Sciences January 2009Dokument21 SeitenAttitude Control by Magnetic Torquer: Advances in The Astronautical Sciences January 2009Yudi Luqmanul HakimNoch keine Bewertungen
- 15arspc Submission 92Dokument12 Seiten15arspc Submission 92reneebartoloNoch keine Bewertungen
- Attitude and Orbit Control System For The European Student Moon Orbiter (ESMO)Dokument11 SeitenAttitude and Orbit Control System For The European Student Moon Orbiter (ESMO)-wandrian-Noch keine Bewertungen
- Integrated Attitude-Orbit Dynamics and Control of Spacecraft Systems: State of The Art and Future TrendsDokument12 SeitenIntegrated Attitude-Orbit Dynamics and Control of Spacecraft Systems: State of The Art and Future TrendsPri OliveiraNoch keine Bewertungen
- SKAT: A VERSATILE STATION-KEEPING ANALYSIS TOOL FOR LEO AND GEODokument8 SeitenSKAT: A VERSATILE STATION-KEEPING ANALYSIS TOOL FOR LEO AND GEOperrot louisNoch keine Bewertungen
- A Sensor Fusion Algorithm For Cooperative LocalizationDokument8 SeitenA Sensor Fusion Algorithm For Cooperative LocalizationVijaya YajnanarayanaNoch keine Bewertungen
- TRCK - Tracking Systems For Satellite CommunicationsDokument15 SeitenTRCK - Tracking Systems For Satellite CommunicationsYeroosan seenaaNoch keine Bewertungen
- Performance Analysis of Network-RTK Techniques ForDokument8 SeitenPerformance Analysis of Network-RTK Techniques ForSergiy PogoryelovNoch keine Bewertungen
- Global Positioning System: Paper Presentation OnDokument10 SeitenGlobal Positioning System: Paper Presentation OnSravan Kumar100% (1)
- Backstepping Method For ControlDokument5 SeitenBackstepping Method For ControlHoang Duc ThucNoch keine Bewertungen
- Nonlinear Control of Motion Synchronization For Satellite Proximity OperationsDokument11 SeitenNonlinear Control of Motion Synchronization For Satellite Proximity OperationsKanu GovilaNoch keine Bewertungen
- (En Revisión) 3D - Finite - Time - Tracking For Coordinated Tasks With Unmanned Underwater VehiclesDokument19 Seiten(En Revisión) 3D - Finite - Time - Tracking For Coordinated Tasks With Unmanned Underwater VehiclesMilton AlvaradoNoch keine Bewertungen
- Deimos-2 - Satellite Missions - EoPortal DirectoryDokument22 SeitenDeimos-2 - Satellite Missions - EoPortal Directorynab05Noch keine Bewertungen
- IAA Paper MarsIII AtmosphereDokument8 SeitenIAA Paper MarsIII AtmosphereSean LambNoch keine Bewertungen
- MDIw MTQ5 OADokument5 SeitenMDIw MTQ5 OAPandurang GurakheNoch keine Bewertungen
- Principles of Guidance, Navigation and Control of UavsDokument30 SeitenPrinciples of Guidance, Navigation and Control of Uavspervaiz KhalidNoch keine Bewertungen
- Precise Formation Flying Control of Mult PDFDokument15 SeitenPrecise Formation Flying Control of Mult PDFAlvaroFernandezVillarNoch keine Bewertungen
- Deep SpaceDokument9 SeitenDeep SpaceGirishkumar KaisettyNoch keine Bewertungen
- Global Positioning System: A Seminar ReportDokument27 SeitenGlobal Positioning System: A Seminar ReportSajeshp SajeshNoch keine Bewertungen
- A Behavior-Based ArchitectureDokument19 SeitenA Behavior-Based Architecture9777907190Noch keine Bewertungen
- "GPS (Global Positioning System) : A Seminar Presentation ReportDokument38 Seiten"GPS (Global Positioning System) : A Seminar Presentation Reportkartik143Noch keine Bewertungen
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDokument39 SeitenBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSNoch keine Bewertungen
- Recent Developments in Ship Control System DesignDokument4 SeitenRecent Developments in Ship Control System DesignManoj KumarNoch keine Bewertungen
- Horizon Sensing Attitude Stabilisation SystemDokument9 SeitenHorizon Sensing Attitude Stabilisation SystemAnonymous 9feJpOwNoch keine Bewertungen
- Rover Using EstimationDokument18 SeitenRover Using EstimationKevinXavierNoch keine Bewertungen
- Quadrotor PDFDokument11 SeitenQuadrotor PDFMo'menKhaledNoch keine Bewertungen
- Frictionless Spacecraft Simulator With Unrestricted Three Axis Movement For NanosatsDokument12 SeitenFrictionless Spacecraft Simulator With Unrestricted Three Axis Movement For NanosatsMaman de AnisNoch keine Bewertungen
- Gps Seiet PDFDokument18 SeitenGps Seiet PDFAnkit MauryaNoch keine Bewertungen
- Drones 03 00038 v2Dokument22 SeitenDrones 03 00038 v2Adik Susilo WNoch keine Bewertungen
- Investigation of Malaysian Low Earth Orbits For ReDokument10 SeitenInvestigation of Malaysian Low Earth Orbits For Remaudira aNoch keine Bewertungen
- Jamris Review Assignment 740 Article 909Dokument26 SeitenJamris Review Assignment 740 Article 909ANH TUAN PHAMNoch keine Bewertungen
- Module 1 & 2 (Tracking Radar) PDFDokument52 SeitenModule 1 & 2 (Tracking Radar) PDFDeeksha NaiduNoch keine Bewertungen
- Global Positioning System: AbstractDokument7 SeitenGlobal Positioning System: AbstractGanesh VenkatesanNoch keine Bewertungen
- GD-APS FutureWaves Oceans2016Dokument9 SeitenGD-APS FutureWaves Oceans2016aandueza_1Noch keine Bewertungen
- Gps Lecture NotesDokument101 SeitenGps Lecture NotesRocking ChakravarthyNoch keine Bewertungen
- Mod V Adv SurvDokument35 SeitenMod V Adv SurvSouravNoch keine Bewertungen
- SatCom Unit V GPSDokument23 SeitenSatCom Unit V GPSsakethNoch keine Bewertungen
- A New Approach To Radiation Tolerance For High-Orbit and Interplantary Smallsat MissionsDokument12 SeitenA New Approach To Radiation Tolerance For High-Orbit and Interplantary Smallsat MissionsCereyn HarnexNoch keine Bewertungen
- Orbit Optimization Using STKDokument9 SeitenOrbit Optimization Using STKdpatelhsNoch keine Bewertungen
- Earthquake Final Report PRINTDokument52 SeitenEarthquake Final Report PRINTManickavasagamNoch keine Bewertungen
- GPS Applications GuideDokument14 SeitenGPS Applications GuideSinu VasuNoch keine Bewertungen
- Fundamentals of GPS: P.L.N. RajuDokument30 SeitenFundamentals of GPS: P.L.N. RajuPranab PrajapatiNoch keine Bewertungen
- Magneto-Coulombic Fault Tolerant Sliding Mode Attitude Control of Earth Pointing SatellitesDokument15 SeitenMagneto-Coulombic Fault Tolerant Sliding Mode Attitude Control of Earth Pointing SatellitesB'JOY MukherjeeNoch keine Bewertungen
- Thesis LiZhou FinalDokument128 SeitenThesis LiZhou Finalauto_knightNoch keine Bewertungen
- Time Lapse Approach to Monitoring Oil, Gas, and CO2 Storage by Seismic MethodsVon EverandTime Lapse Approach to Monitoring Oil, Gas, and CO2 Storage by Seismic MethodsNoch keine Bewertungen
- Sat-Antenna-Paper-2003 00 ControlAutomationSystems Antenna Control System Using Step Tracking Algorithm With Hinf ControllerDokument10 SeitenSat-Antenna-Paper-2003 00 ControlAutomationSystems Antenna Control System Using Step Tracking Algorithm With Hinf ControllerLuis Fernando Troche FuentesNoch keine Bewertungen
- Silicon N-Channel Power F-MOS FETDokument2 SeitenSilicon N-Channel Power F-MOS FETLuis Fernando Troche FuentesNoch keine Bewertungen
- Manual Pic 18F2550Dokument430 SeitenManual Pic 18F2550Pancho NuncioNoch keine Bewertungen
- Dac 0808Dokument14 SeitenDac 0808Jes SarGeNoch keine Bewertungen
- ACS712 DatasheetDokument15 SeitenACS712 DatasheetwirawansatriaNoch keine Bewertungen
- Mini 8 Port Switch User ManualDokument15 SeitenMini 8 Port Switch User ManualLuis Fernando Troche FuentesNoch keine Bewertungen
- Erection Manual Hydro-1Dokument63 SeitenErection Manual Hydro-1rajfab100% (1)
- Dynamics and Bifurcations-HaleDokument577 SeitenDynamics and Bifurcations-Halealaa alqurasheyNoch keine Bewertungen
- Cognac Brandies From A Region of France, Cognac Are Called Cognac. They Are Known To Be The Best Types of Brandies in The WorldDokument3 SeitenCognac Brandies From A Region of France, Cognac Are Called Cognac. They Are Known To Be The Best Types of Brandies in The Worldmanuk193Noch keine Bewertungen
- Abstract Load Balancing 1Dokument3 SeitenAbstract Load Balancing 1Naveen AbhiNoch keine Bewertungen
- Maths Comparison Summary ReportDokument274 SeitenMaths Comparison Summary ReportShahrukh MunirNoch keine Bewertungen
- CO2 Dosing and Generation SystemDokument344 SeitenCO2 Dosing and Generation SystemABAID ULLAHNoch keine Bewertungen
- Quiz6 AnswerDokument8 SeitenQuiz6 AnswerTrí Tạ MinhNoch keine Bewertungen
- Area Under The CurveDokument3 SeitenArea Under The CurveReyland DumlaoNoch keine Bewertungen
- Structural Soils Engineer's Quick Reference GuideDokument64 SeitenStructural Soils Engineer's Quick Reference GuideGreg McNamaraNoch keine Bewertungen
- Record results of toy soldier experiment times with different massesDokument42 SeitenRecord results of toy soldier experiment times with different massesTeoh Han Jie100% (1)
- Astm D2899Dokument6 SeitenAstm D2899btwilliNoch keine Bewertungen
- Leica CME ManualDokument24 SeitenLeica CME ManualMaria DapkeviciusNoch keine Bewertungen
- Midterm - ICT1 ExamDokument4 SeitenMidterm - ICT1 ExamHelen PerlasNoch keine Bewertungen
- Areas Related To CircleDokument32 SeitenAreas Related To CircleGiorno GiovannaNoch keine Bewertungen
- NeurophysiologyDokument364 SeitenNeurophysiologyTaimoor Ul HassanNoch keine Bewertungen
- Well CompletionDokument26 SeitenWell Completionnitesh kumarNoch keine Bewertungen
- Scania DC09, DC13, DC16 Industrial Engines - Electrical System - CompressedDokument40 SeitenScania DC09, DC13, DC16 Industrial Engines - Electrical System - CompressedMaurice ConnorNoch keine Bewertungen
- Total Quality Management (TQM) ToolsDokument7 SeitenTotal Quality Management (TQM) ToolsLaks_AsgNoch keine Bewertungen
- Class XII Computer Project - Hotel ManagementDokument29 SeitenClass XII Computer Project - Hotel ManagementLakshmi Puthiyedath71% (7)
- StudenttextDokument15 SeitenStudenttextapi-195130729Noch keine Bewertungen
- Wind Load Sheet by Abid SirDokument4 SeitenWind Load Sheet by Abid SirMohammad KasimNoch keine Bewertungen
- EL Bay-O-Net Current-Limiting Fuse Assembly - CA132039ENDokument4 SeitenEL Bay-O-Net Current-Limiting Fuse Assembly - CA132039ENfederico4thNoch keine Bewertungen
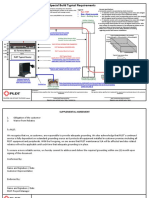
- Special Build Typical Requirements (Rev1) PDFDokument2 SeitenSpecial Build Typical Requirements (Rev1) PDFToper CdjNoch keine Bewertungen
- Graph Theory 6Dokument30 SeitenGraph Theory 6Zeeshan AhmedNoch keine Bewertungen
- Drive Fundamentals and DC Motor CharacteristicsDokument6 SeitenDrive Fundamentals and DC Motor CharacteristicsKawooya CharlesNoch keine Bewertungen
- Introduction To Probability: Business Statistics: Communicating With Numbers, 4eDokument52 SeitenIntroduction To Probability: Business Statistics: Communicating With Numbers, 4eRetno Ajeng Anissa WidiatriNoch keine Bewertungen
- Inductance Calculations Working Formulas and Tables (Grover-1973)Dokument153 SeitenInductance Calculations Working Formulas and Tables (Grover-1973)Anonymous 2OxpGvaNW100% (1)
- CS2204 Analog & Digital Communication Question BankDokument16 SeitenCS2204 Analog & Digital Communication Question BankJesse VincentNoch keine Bewertungen
- Noc18 cs48 Assignment3Dokument4 SeitenNoc18 cs48 Assignment3shweta100% (1)
- AerialSolution - 280 - Brochure - LT - New Design - Final - LRDokument20 SeitenAerialSolution - 280 - Brochure - LT - New Design - Final - LRRover DmsNoch keine Bewertungen