Das könnte Ihnen auch gefallen
- Level Flow ControlDokument6 SeitenLevel Flow Controlarpit gargNoch keine Bewertungen
- Packed Bed FermentersDokument20 SeitenPacked Bed FermentersGerald Owen FranzaNoch keine Bewertungen
- CELCHA2 Study GuidesDokument7 SeitenCELCHA2 Study GuidesEsther100% (1)
- Intro Heat Exchanger Process ControlDokument3 SeitenIntro Heat Exchanger Process ControlAimi AthirahNoch keine Bewertungen
- Process Control FundamentalsDokument110 SeitenProcess Control FundamentalsYoosu NguyenNoch keine Bewertungen
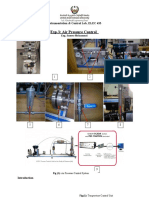
- Air Flow Pressure Temperature Control Training SystemDokument2 SeitenAir Flow Pressure Temperature Control Training SystemKamalanathen ChlvnNoch keine Bewertungen
- Boiling Heat Transfer ExpDokument22 SeitenBoiling Heat Transfer ExpMahesh Vp0% (1)
- Can High Temperature Steam Electrolysis Function With Geothermal HeatDokument9 SeitenCan High Temperature Steam Electrolysis Function With Geothermal HeatAnonymous d2K8lZPRugNoch keine Bewertungen
- Batch Fed BatchDokument60 SeitenBatch Fed BatchAyesha RalliyaNoch keine Bewertungen
- Camphor BallsDokument8 SeitenCamphor BallsGurunath EpiliNoch keine Bewertungen
- (Unit Operations Laboratory-2) : Name: Siraj Ali Aldeeb ID: 3214118Dokument11 Seiten(Unit Operations Laboratory-2) : Name: Siraj Ali Aldeeb ID: 3214118Siraj AL sharifNoch keine Bewertungen
- Process Control & Instrumentation Lab BKF 4791 Title of Experiment: Measurement and Control Air Flow System Lecturer's Name Group of Member: Name IDDokument12 SeitenProcess Control & Instrumentation Lab BKF 4791 Title of Experiment: Measurement and Control Air Flow System Lecturer's Name Group of Member: Name IDTan Yong ChaiNoch keine Bewertungen
- Lab Report CompleteDokument30 SeitenLab Report Completefahadfiaz0% (1)
- Cooling Tower PDFDokument7 SeitenCooling Tower PDFShahid HussainNoch keine Bewertungen
- Development of Improved Pid Controller For Single-Effect EvaporatorDokument4 SeitenDevelopment of Improved Pid Controller For Single-Effect Evaporatoresatjournals100% (1)
- Exp3 - Air Pressure ControlDokument8 SeitenExp3 - Air Pressure ControlDon LawrenceNoch keine Bewertungen
- LS-32003 Solid Liquid Extraction 80415Dokument32 SeitenLS-32003 Solid Liquid Extraction 80415NuttyPNoch keine Bewertungen
- Gas TransferDokument10 SeitenGas TransferSy-Dar LiouNoch keine Bewertungen
- Intelligent Device Management Tutorial: CalibrationDokument16 SeitenIntelligent Device Management Tutorial: Calibrationtrozn2812100% (1)
- Electro DialysisDokument10 SeitenElectro DialysisprabudhaNoch keine Bewertungen
- Prelab 2 Gas AbsorptionDokument5 SeitenPrelab 2 Gas AbsorptionDean Joyce AlborotoNoch keine Bewertungen
- Lab Report CMT 450 Tray DryerDokument3 SeitenLab Report CMT 450 Tray DryerJohanNoch keine Bewertungen
- Iso Batch ReactorDokument10 SeitenIso Batch ReactorSakethBharadwajNoch keine Bewertungen
- Expt. 4 - Pressure ControlDokument16 SeitenExpt. 4 - Pressure Controlpleco4meNoch keine Bewertungen
- Filter Drum RotaryDokument5 SeitenFilter Drum RotaryMannuela Anugrahing MarwindiNoch keine Bewertungen
- Step Response of First Order System Expt ChE Lab 2Dokument5 SeitenStep Response of First Order System Expt ChE Lab 2simonatics08Noch keine Bewertungen
- Edibon Fixed and Fluidized Bed ManualDokument40 SeitenEdibon Fixed and Fluidized Bed ManualArianne BatallonesNoch keine Bewertungen
- PFR Lab ReportDokument21 SeitenPFR Lab ReportValentinoDullSatin100% (1)
- Seminar On Nano Fluid Based Solar Thermal SystemsDokument13 SeitenSeminar On Nano Fluid Based Solar Thermal SystemsSARATH SASINoch keine Bewertungen
- FiltrationDokument15 SeitenFiltrationCharlene Pelecio SubingsubingNoch keine Bewertungen
- Intro CSTRDokument6 SeitenIntro CSTREmmanuel PlazaNoch keine Bewertungen
- Level ControlDokument38 SeitenLevel Controlcgjp120391Noch keine Bewertungen
- I. Principles of Wind EnergyDokument3 SeitenI. Principles of Wind EnergyJohn TauloNoch keine Bewertungen
- Mathematical Modeling of Two Tank System Ijariie4840Dokument8 SeitenMathematical Modeling of Two Tank System Ijariie4840Abeng YogtaNoch keine Bewertungen
- Batch ReactorDokument4 SeitenBatch ReactorFoo Xiao BingNoch keine Bewertungen
- Isothermal CSTR PDFDokument9 SeitenIsothermal CSTR PDFprashant_cool_4_uNoch keine Bewertungen
- Liquid Level Control SystemDokument0 SeitenLiquid Level Control SystemNajiRihaniNoch keine Bewertungen
- EXP 2 - Plug Flow Tubular ReactorDokument18 SeitenEXP 2 - Plug Flow Tubular ReactorOng Jia YeeNoch keine Bewertungen
- Assignment 1 (B.i, II) CEV544.VsdDokument2 SeitenAssignment 1 (B.i, II) CEV544.VsdFaradilah Binti Ajma'inNoch keine Bewertungen
- Experiment 1 - DiffusionDokument31 SeitenExperiment 1 - DiffusionPatricia Ann Mae0% (1)
- Heat Exchanger Sample Report 2018Dokument55 SeitenHeat Exchanger Sample Report 2018RahulSrivastava100% (1)
- PFR Ilar TorrefielDokument16 SeitenPFR Ilar TorrefielCastiel161Noch keine Bewertungen
- Laboratory Scale Water Circuit Including A Photocatalytic ReactorDokument8 SeitenLaboratory Scale Water Circuit Including A Photocatalytic ReactorPatrick_NickelsNoch keine Bewertungen
- PBRDokument3 SeitenPBRTio PrasetyoNoch keine Bewertungen
- HTO Lab Manual Fall-18 PDFDokument52 SeitenHTO Lab Manual Fall-18 PDFhumair khaliqNoch keine Bewertungen
- 8.3 - Packed-Bed ReactorsDokument20 Seiten8.3 - Packed-Bed ReactorsDotaKINGNoch keine Bewertungen
- Advance Fluid Lab ManualDokument55 SeitenAdvance Fluid Lab ManualchristianNoch keine Bewertungen
- State of Libya University Al-Mergib Faculty Engineering Department Engineering Chemical & PetroleumDokument12 SeitenState of Libya University Al-Mergib Faculty Engineering Department Engineering Chemical & PetroleumSiraj AL sharif100% (1)
- Heat Exchanger ReportDokument8 SeitenHeat Exchanger Reportarslan shahidNoch keine Bewertungen
- Experiment 2 Cooling TowerDokument2 SeitenExperiment 2 Cooling TowerEdin AbolenciaNoch keine Bewertungen
- Prelab 3 Response of First and Second Order SystemsDokument7 SeitenPrelab 3 Response of First and Second Order SystemsDean Joyce AlborotoNoch keine Bewertungen
- ME 495 - Mechanical and Thermal Systems LabDokument12 SeitenME 495 - Mechanical and Thermal Systems LabKammy LaiNoch keine Bewertungen
- Thermal Conductivity of FRP CompositesDokument69 SeitenThermal Conductivity of FRP Compositesjppmj100% (1)
- B.tech Chemical EngineeringDokument65 SeitenB.tech Chemical Engineeringchetanmale100% (1)
- Process Temperature Control Using PID and LabVIEWDokument17 SeitenProcess Temperature Control Using PID and LabVIEWManish SinghNoch keine Bewertungen
- Gas UnitDokument4 SeitenGas UnitZalina SamsuddinNoch keine Bewertungen
- Plate Type Heat Exchanger Project Report 5Dokument26 SeitenPlate Type Heat Exchanger Project Report 5ParthivNoch keine Bewertungen
- Philipp Louis D#2docxDokument8 SeitenPhilipp Louis D#2docxEymann Jala100% (3)
- OHT 56 RT Concrete Pouring OnDokument8 SeitenOHT 56 RT Concrete Pouring OnLi XueNoch keine Bewertungen
- Review-for-FE-Transportation 2 PDFDokument11 SeitenReview-for-FE-Transportation 2 PDFLi XueNoch keine Bewertungen
- Methanol Recovery in BiodieselDokument8 SeitenMethanol Recovery in BiodieselLi XueNoch keine Bewertungen
- 员工时间表Dokument1 Seite员工时间表Li XueNoch keine Bewertungen
- FDOT Construction Specs 455-117Dokument67 SeitenFDOT Construction Specs 455-117Li XueNoch keine Bewertungen
- Speeding Class Online QuestionsNanswerDokument20 SeitenSpeeding Class Online QuestionsNanswerLi XueNoch keine Bewertungen
- Two Tank Study MaterialDokument28 SeitenTwo Tank Study MaterialLi XueNoch keine Bewertungen
- Series 1 - Efflux TimeDokument6 SeitenSeries 1 - Efflux TimeLi XueNoch keine Bewertungen
- Sample Calculation For Efflux TimeDokument8 SeitenSample Calculation For Efflux TimeLi Xue100% (1)
- Driver License Written TestDokument17 SeitenDriver License Written TestLi XueNoch keine Bewertungen
- Brayton Cycle PDFDokument22 SeitenBrayton Cycle PDFBiswajeet MaharanaNoch keine Bewertungen
- RT 512 Level Control Trainer Gunt 1178 PDF 1 en GBDokument3 SeitenRT 512 Level Control Trainer Gunt 1178 PDF 1 en GBAli HadiNoch keine Bewertungen
- Mitsubishi Maintenance ManualsDokument39 SeitenMitsubishi Maintenance ManualsPrabhat BhateraNoch keine Bewertungen
- Regenerative Braking of Series-Wound Brushed DC Electric Motors For Electric VehiclesDokument6 SeitenRegenerative Braking of Series-Wound Brushed DC Electric Motors For Electric Vehiclesbeastlt12Noch keine Bewertungen
- EE5104 Adaptive Control Systems/ EE6104 Adaptive Control Systems (Advanced)Dokument5 SeitenEE5104 Adaptive Control Systems/ EE6104 Adaptive Control Systems (Advanced)sujingthetNoch keine Bewertungen
- Ziegler Nichols Matlab PDFDokument8 SeitenZiegler Nichols Matlab PDFMarco Arcos100% (2)
- PID Controller - WikipediaDokument41 SeitenPID Controller - WikipediaHaroon Mohamed MorshedNoch keine Bewertungen
- Sanyo Mco 17aic Co2 Incubator Service Manual 4154392Dokument17 SeitenSanyo Mco 17aic Co2 Incubator Service Manual 4154392Diego CompairedNoch keine Bewertungen
- Control Loop Foundation OverviewDokument163 SeitenControl Loop Foundation Overviewsubhu1981Noch keine Bewertungen
- Biomedical Signal Processing and Control: Omid Sadeghi Fathabadi, Timothy J. Gale, J.C. Olivier, Peter A. DargavilleDokument10 SeitenBiomedical Signal Processing and Control: Omid Sadeghi Fathabadi, Timothy J. Gale, J.C. Olivier, Peter A. Dargavillesam crushNoch keine Bewertungen
- PC Lab ManualDokument47 SeitenPC Lab ManualAoiNoch keine Bewertungen
- Experiment No: 2: AIM: To Study and Simulate Single Phase Semi Control of DC Separately Excited MotorDokument29 SeitenExperiment No: 2: AIM: To Study and Simulate Single Phase Semi Control of DC Separately Excited MotorPratik K AnandparaNoch keine Bewertungen
- Development of An Automatic Arc Welding System Using SMAW ProcessDokument7 SeitenDevelopment of An Automatic Arc Welding System Using SMAW ProcessAnonymous g80PbBY73Noch keine Bewertungen
- Design of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlDokument10 SeitenDesign of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlIAES International Journal of Robotics and AutomationNoch keine Bewertungen
- ARCA Fly ReglerInstr GBDokument6 SeitenARCA Fly ReglerInstr GBavikbhaiNoch keine Bewertungen
- Lab Session 1 Exp 9: Simple PID Flow Control (FIC-413 - POS) Students' ManualDokument19 SeitenLab Session 1 Exp 9: Simple PID Flow Control (FIC-413 - POS) Students' ManualFelicia ChiewNoch keine Bewertungen
- Application Data: Combustion Management Solutions Full-Metered, Cross-Limited ControlDokument6 SeitenApplication Data: Combustion Management Solutions Full-Metered, Cross-Limited Controlsprotkar100% (1)
- AS-500 ManualDokument64 SeitenAS-500 ManualJose PantojaNoch keine Bewertungen
- Uni DriveDokument57 SeitenUni DriveAndrey KapustaNoch keine Bewertungen
- Smartpid2000 Module: Inside of Smart Array ControllerDokument1 SeiteSmartpid2000 Module: Inside of Smart Array ControllerjethinduttNoch keine Bewertungen
- Microprocessor-Based/Ddc Fundamentals: Chapter 4 Bms (DDC Control Fundamental)Dokument31 SeitenMicroprocessor-Based/Ddc Fundamentals: Chapter 4 Bms (DDC Control Fundamental)skywalker_handsomeNoch keine Bewertungen
- 5-DCS ProgramingDokument87 Seiten5-DCS ProgramingalhamNoch keine Bewertungen
- High-Performance Control Inverter VectorDokument14 SeitenHigh-Performance Control Inverter VectorMuthurathinamNoch keine Bewertungen
- 5 Process ControlDokument79 Seiten5 Process ControlGurunath EpiliNoch keine Bewertungen
- DC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesDokument9 SeitenDC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesWen ZJNoch keine Bewertungen
- Direct Digital Control: Om Prakash BhartiDokument5 SeitenDirect Digital Control: Om Prakash Bhartivictor alfonso campechano venturaNoch keine Bewertungen
- Research Paper PosterDokument1 SeiteResearch Paper PosterTanveer IqbalNoch keine Bewertungen
- Auto-Tuning of PID Controllers Via Extremum SeekingDokument6 SeitenAuto-Tuning of PID Controllers Via Extremum SeekingjuliiojaiimesNoch keine Bewertungen
- 72AE1294 PROCESS CONTROL Rev1 080930 PDFDokument129 Seiten72AE1294 PROCESS CONTROL Rev1 080930 PDFTuanNoch keine Bewertungen
- Level Control Trainer FinalDokument6 SeitenLevel Control Trainer FinalSiddhartha SharmaNoch keine Bewertungen
- ELK38-240-C-R-2R DataSheetDokument14 SeitenELK38-240-C-R-2R DataSheetAnna PopaNoch keine Bewertungen
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionVon EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedVon EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedBewertung: 5 von 5 Sternen5/5 (1)
- Well Integrity for Workovers and RecompletionsVon EverandWell Integrity for Workovers and RecompletionsBewertung: 5 von 5 Sternen5/5 (3)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CVon EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNoch keine Bewertungen
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityVon EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNoch keine Bewertungen
- Corrosion and Materials in Hydrocarbon Production: A Compendium of Operational and Engineering AspectsVon EverandCorrosion and Materials in Hydrocarbon Production: A Compendium of Operational and Engineering AspectsNoch keine Bewertungen
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsVon EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNoch keine Bewertungen
- Enhanced Oil Recovery Handout: A Focus on WaterfloodingVon EverandEnhanced Oil Recovery Handout: A Focus on WaterfloodingNoch keine Bewertungen
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseVon EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (51)
- Bulk Material Handling: Practical Guidance for Mechanical EngineersVon EverandBulk Material Handling: Practical Guidance for Mechanical EngineersBewertung: 5 von 5 Sternen5/5 (1)
- Oil: An Overview of the Petroleum IndustryVon EverandOil: An Overview of the Petroleum IndustryBewertung: 4.5 von 5 Sternen4.5/5 (3)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideVon Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideBewertung: 3.5 von 5 Sternen3.5/5 (7)
- Mechanical Vibrations and Condition MonitoringVon EverandMechanical Vibrations and Condition MonitoringBewertung: 5 von 5 Sternen5/5 (1)
- The Laws of Thermodynamics: A Very Short IntroductionVon EverandThe Laws of Thermodynamics: A Very Short IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)Von EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Bewertung: 4 von 5 Sternen4/5 (12)
- Machinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionVon EverandMachinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionNoch keine Bewertungen
- Basic Digital Signal Processing: Butterworths Basic SeriesVon EverandBasic Digital Signal Processing: Butterworths Basic SeriesBewertung: 5 von 5 Sternen5/5 (1)
- Industrial Piping and Equipment Estimating ManualVon EverandIndustrial Piping and Equipment Estimating ManualBewertung: 5 von 5 Sternen5/5 (7)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsVon EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNoch keine Bewertungen
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AVon EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANoch keine Bewertungen
- Laminar Flow Forced Convection in Ducts: A Source Book for Compact Heat Exchanger Analytical DataVon EverandLaminar Flow Forced Convection in Ducts: A Source Book for Compact Heat Exchanger Analytical DataNoch keine Bewertungen
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisVon EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisBewertung: 4 von 5 Sternen4/5 (2)