Das könnte Ihnen auch gefallen
- BNA Quick SetupDokument54 SeitenBNA Quick Setupggrrrrll100% (1)
- Conversion of 60870 To IEC61850 Using Toshiba RelayDokument9 SeitenConversion of 60870 To IEC61850 Using Toshiba RelayEshwar MadiwalNoch keine Bewertungen
- E560 cmd11 CsDokument10 SeitenE560 cmd11 Cssuraiyya begumNoch keine Bewertungen
- EDN Design Ideas 1998Dokument166 SeitenEDN Design Ideas 1998chag1956100% (4)
- Ec10 ManualDokument15 SeitenEc10 Manualnaseer449Noch keine Bewertungen
- Adr 2000Dokument25 SeitenAdr 2000Anonymous G6ceYCzwtNoch keine Bewertungen
- PLC ModemDokument6 SeitenPLC ModemGopinath KudaravalliNoch keine Bewertungen
- 1187 DatasheetDokument6 Seiten1187 DatasheetAli B. AthamnehNoch keine Bewertungen
- D 432 ND 31Dokument6 SeitenD 432 ND 31mushahid980Noch keine Bewertungen
- Eng C DIAS CIV 521Dokument48 SeitenEng C DIAS CIV 521dirkbacNoch keine Bewertungen
- Incon 1250Dokument35 SeitenIncon 1250Hugo MoralesNoch keine Bewertungen
- User'S Manual: JULY, 2015Dokument12 SeitenUser'S Manual: JULY, 2015Mudassar RafiqNoch keine Bewertungen
- Cdr-4Mps / Cdr-8Mps Users Guide: CDR Series Revision Date: 07/12/06Dokument27 SeitenCdr-4Mps / Cdr-8Mps Users Guide: CDR Series Revision Date: 07/12/06Vlad PkNoch keine Bewertungen
- MODBUS Communication With Fluidwell E-Series 002 - ENDokument16 SeitenMODBUS Communication With Fluidwell E-Series 002 - ENshoaibNoch keine Bewertungen
- CN0224 DatasheetDokument6 SeitenCN0224 DatasheetcointoinNoch keine Bewertungen
- LCM Module: Industrial Co., LTDDokument18 SeitenLCM Module: Industrial Co., LTDelectropicNoch keine Bewertungen
- 5 Pin Interface, Version 2.9, 01.02.2010Dokument10 Seiten5 Pin Interface, Version 2.9, 01.02.2010msalem73Noch keine Bewertungen
- 3) Connecting The PLC To External DevicesDokument8 Seiten3) Connecting The PLC To External DevicesAnderson MoraNoch keine Bewertungen
- Interfacing The Serial PortDokument40 SeitenInterfacing The Serial Portjmohitj100% (1)
- SCADA - Topic - 2 - Updated (SCADA Hardware and Firmware)Dokument75 SeitenSCADA - Topic - 2 - Updated (SCADA Hardware and Firmware)Fazil MəmmədliNoch keine Bewertungen
- MR-J2S-S099 - Specifications and Instruction Manual BCN-B11127-478 (01.02) PDFDokument84 SeitenMR-J2S-S099 - Specifications and Instruction Manual BCN-B11127-478 (01.02) PDFDoDuyBacNoch keine Bewertungen
- T1/PRI and E1/PRI Cards 2-1Dokument12 SeitenT1/PRI and E1/PRI Cards 2-1TghmoNoch keine Bewertungen
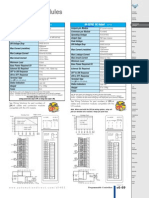
- AC/DC Input and Simulator ModulesDokument6 SeitenAC/DC Input and Simulator ModulesInamex-fpVeracruzNoch keine Bewertungen
- Dkg-507 Automatic Mains Failure Unit: Canbus and Mpu VersionsDokument54 SeitenDkg-507 Automatic Mains Failure Unit: Canbus and Mpu VersionsFuqqi BhaiNoch keine Bewertungen
- 07 KT 97Dokument54 Seiten07 KT 97max_ingNoch keine Bewertungen
- QuantumAddenum QIII Jumpers S90 010M Add Aug2000Dokument8 SeitenQuantumAddenum QIII Jumpers S90 010M Add Aug2000zoraida170186Noch keine Bewertungen
- Generator 307 USERDokument54 SeitenGenerator 307 USERLiviu PopaNoch keine Bewertungen
- Presentation 1Dokument12 SeitenPresentation 1hardtodecodeNoch keine Bewertungen
- RTU511Dokument9 SeitenRTU511Sambit MohapatraNoch keine Bewertungen
- CP2105Dokument24 SeitenCP2105acechoeNoch keine Bewertungen
- CP 9131PLC System User Manual V1.00 2022.05.2708 25Dokument59 SeitenCP 9131PLC System User Manual V1.00 2022.05.2708 25Electricitat-Electrònica IES Milà i FontanalsNoch keine Bewertungen
- Cisco ComandDokument122 SeitenCisco ComandJaime MoralesNoch keine Bewertungen
- I-Monitor Motor Controller Manual Rev 7 6Dokument72 SeitenI-Monitor Motor Controller Manual Rev 7 6elch310scridbNoch keine Bewertungen
- Toledo 8142 ProDokument32 SeitenToledo 8142 ProRoy Aguil100% (1)
- Cable PLC PanelDokument31 SeitenCable PLC PanelAkasha DotaNoch keine Bewertungen
- CAN BusDokument9 SeitenCAN Buspablodanielrigo100% (2)
- 04da SDokument2 Seiten04da SasyfingNoch keine Bewertungen
- DC Output Modules: D4-32TD1-1 DC Output D4-32TD2 DC OutputDokument6 SeitenDC Output Modules: D4-32TD1-1 DC Output D4-32TD2 DC Outputmushahid980Noch keine Bewertungen
- CP2102Dokument18 SeitenCP2102gigel1980Noch keine Bewertungen
- Selecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsDokument9 SeitenSelecting and Using RS-232, RS-422, and RS-485 Serial Data StandardssoumyajitemdmNoch keine Bewertungen
- TUC-6 Weigh Feeder o & M ManualDokument308 SeitenTUC-6 Weigh Feeder o & M ManualBiplabKumarBehera86% (29)
- Layout Tips For 12-Bit A/D Converter Application: Getting A Good StartDokument7 SeitenLayout Tips For 12-Bit A/D Converter Application: Getting A Good StartRoberto MejiaNoch keine Bewertungen
- Current Dc3iobDokument14 SeitenCurrent Dc3iobsunhuynhNoch keine Bewertungen
- CS3000 1Dokument61 SeitenCS3000 1hbahriioNoch keine Bewertungen
- MDS SD Series: Setup GuideDokument4 SeitenMDS SD Series: Setup GuideCarlos David Ordaz JuárezNoch keine Bewertungen
- Syncro Io2Dokument7 SeitenSyncro Io2yulizardNoch keine Bewertungen
- Excellence Ethernet BA e 11780579ADokument32 SeitenExcellence Ethernet BA e 11780579Anirgal76Noch keine Bewertungen
- Pic Servo SCDokument51 SeitenPic Servo SCFvck Ccp100% (1)
- VLCI-X1 Manual v1.5Dokument87 SeitenVLCI-X1 Manual v1.5Andre TeixeiraNoch keine Bewertungen
- Hac LM96Dokument15 SeitenHac LM96RowelltoNoch keine Bewertungen
- Atm Configuration Tutorial & Experiment On Atm ConnectivityDokument28 SeitenAtm Configuration Tutorial & Experiment On Atm ConnectivityHans AbdullahNoch keine Bewertungen
- Minitrol Series: Installation & Operating InstructionsDokument26 SeitenMinitrol Series: Installation & Operating InstructionsFahrur RadziNoch keine Bewertungen
- Hracmv9 Ib140010enDokument15 SeitenHracmv9 Ib140010enTodea Mihai IulianNoch keine Bewertungen
- Super Sequencer With Margining Control and Temperature Monitoring ADM1062Dokument36 SeitenSuper Sequencer With Margining Control and Temperature Monitoring ADM1062Songül KılınçNoch keine Bewertungen
- PCS250 Ei00Dokument44 SeitenPCS250 Ei00Pro SegNoch keine Bewertungen
- Hoistman'S Operator Panel Operations and Maintenance Manual: Benchmark P/N AMS4A043Dokument83 SeitenHoistman'S Operator Panel Operations and Maintenance Manual: Benchmark P/N AMS4A043Cuenta InformacionNoch keine Bewertungen
- Paradox PCS250Dokument44 SeitenParadox PCS250NikosMilonasNoch keine Bewertungen
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksVon EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNoch keine Bewertungen
- High-Performance D/A-Converters: Application to Digital TransceiversVon EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Key Ence Me Did Ores Des Loca Men ToDokument70 SeitenKey Ence Me Did Ores Des Loca Men TojoaoluNoch keine Bewertungen
- Imonitor Eam Programbook enDokument28 SeitenImonitor Eam Programbook enjoaoluNoch keine Bewertungen
- M1 Star MarpossDokument64 SeitenM1 Star MarpossjoaoluNoch keine Bewertungen
- Signal Conditioner / Demodulator For LVDT Sensors: D +100mm D 0Dokument2 SeitenSignal Conditioner / Demodulator For LVDT Sensors: D +100mm D 0joaoluNoch keine Bewertungen
- SMAC Actuators User Manual 05-05Dokument52 SeitenSMAC Actuators User Manual 05-05joaoluNoch keine Bewertungen
- SI200Dokument5 SeitenSI200joaoluNoch keine Bewertungen
- CodigoEtico e CondutaSBSDokument4 SeitenCodigoEtico e CondutaSBSjoaoluNoch keine Bewertungen
- Application Story 2 Howmet Turbine Blade GaugingDokument1 SeiteApplication Story 2 Howmet Turbine Blade GaugingjoaoluNoch keine Bewertungen
- An Investigation of The Use of A High Resolution ADokument9 SeitenAn Investigation of The Use of A High Resolution ARenzo EspejoNoch keine Bewertungen
- META - MAUI - APP - Note 0.08 PDFDokument322 SeitenMETA - MAUI - APP - Note 0.08 PDFJoao Carlos Ramos100% (1)
- Audiolab Mdac HFCDokument3 SeitenAudiolab Mdac HFCdgtdejanNoch keine Bewertungen
- Boss GT-6 Service NotesDokument26 SeitenBoss GT-6 Service NotesFernando GómezNoch keine Bewertungen
- ALC887Dokument82 SeitenALC887primus2Noch keine Bewertungen
- Sigmadsp 28-/56-Bit Audio Processor With Two Adcs and Four DacsDokument52 SeitenSigmadsp 28-/56-Bit Audio Processor With Two Adcs and Four Dacsjohn9999_502754Noch keine Bewertungen
- Digital Electronics (MCQ) PART-1Dokument7 SeitenDigital Electronics (MCQ) PART-101ABHIGYAN MAJINoch keine Bewertungen
- Manual High End Audio DAC For Raspberry Pi 2Dokument14 SeitenManual High End Audio DAC For Raspberry Pi 2Mónica Ciccia Huayama0% (1)
- Vlsi2022 C10-1Dokument31 SeitenVlsi2022 C10-1himmel17Noch keine Bewertungen
- Intro To MechatronicsDokument30 SeitenIntro To MechatronicsUrvashi ParmarNoch keine Bewertungen
- SpecLab ManualDokument113 SeitenSpecLab ManualJim CorinnaNoch keine Bewertungen
- The Audio Critic 26 RDokument42 SeitenThe Audio Critic 26 RMichelle MannNoch keine Bewertungen
- NAU8810 Datasheet Rev 2.7Dokument100 SeitenNAU8810 Datasheet Rev 2.7Jimmy LinNoch keine Bewertungen
- Predict The Frequency and Magnitude of The Primary Phase Truncation SpurDokument4 SeitenPredict The Frequency and Magnitude of The Primary Phase Truncation Spurravi010582Noch keine Bewertungen
- Ite Lec 01 Introduction v01Dokument22 SeitenIte Lec 01 Introduction v01omar salahNoch keine Bewertungen
- Low-Cost, Integrated Analog Front-End For Weight-Scale and Body Composition MeasurementDokument30 SeitenLow-Cost, Integrated Analog Front-End For Weight-Scale and Body Composition MeasurementAminu Quadri OluwaremilekunNoch keine Bewertungen
- 15 Series: Product Catalog 2015Dokument48 Seiten15 Series: Product Catalog 2015Luka TrengovskiNoch keine Bewertungen
- (Report) Design of A Low-Power Asynchronous SAR ADC in 45 NM CMOS TechnologyDokument50 Seiten(Report) Design of A Low-Power Asynchronous SAR ADC in 45 NM CMOS TechnologyMurod KurbanovNoch keine Bewertungen
- Yokogawa mt220 Manual PDFDokument87 SeitenYokogawa mt220 Manual PDFsalmanpkplusNoch keine Bewertungen
- The Audio Critic 16 RDokument56 SeitenThe Audio Critic 16 RDale CheneryNoch keine Bewertungen
- M.Tech-VLSISD - R18 - SyllabusDokument57 SeitenM.Tech-VLSISD - R18 - SyllabusPanku RangareeNoch keine Bewertungen
- Current Steering DacDokument6 SeitenCurrent Steering Dacfahmi rasiqNoch keine Bewertungen
- p25m PDFDokument5 Seitenp25m PDFbaruaeeeNoch keine Bewertungen
- ARJUN 10 ManualDokument20 SeitenARJUN 10 Manualshis100% (1)
- Digital Fundamentals: FloydDokument25 SeitenDigital Fundamentals: FloydBarkhad MohamedNoch keine Bewertungen
- IDT ZSC31015-DatasheetDokument52 SeitenIDT ZSC31015-DatasheetOrion FalconNoch keine Bewertungen
- Philips Az1500 Az1505 SMDokument33 SeitenPhilips Az1500 Az1505 SMJuan Carlos PerdomoNoch keine Bewertungen
- Ch13 ADC, DAC and Sensor InterfacingDokument33 SeitenCh13 ADC, DAC and Sensor Interfacingsumbal_iqbal100% (1)