Das könnte Ihnen auch gefallen
- Cnaas in Noreway gn4.3 Workshop Oct 2019-Uninett-3222Dokument18 SeitenCnaas in Noreway gn4.3 Workshop Oct 2019-Uninett-3222Shakeel AminNoch keine Bewertungen
- 4 5958578051531934422Dokument297 Seiten4 5958578051531934422Shakeel AminNoch keine Bewertungen
- Session2 Monitoring and NetworkmanagementDokument25 SeitenSession2 Monitoring and NetworkmanagementShakeel AminNoch keine Bewertungen
- Arnes Nms Workshop Cop 2019 OctDokument12 SeitenArnes Nms Workshop Cop 2019 OctShakeel AminNoch keine Bewertungen
- Nmap CommandsDokument6 SeitenNmap CommandsShakeel AminNoch keine Bewertungen
- How to Write a Successful Letter of Motivation for a Master's Program in GermanyDokument1 SeiteHow to Write a Successful Letter of Motivation for a Master's Program in GermanyReska Nurul FadilaNoch keine Bewertungen
- Table of Contents: A Concise Guide to Common Linux CommandsDokument135 SeitenTable of Contents: A Concise Guide to Common Linux CommandsKhris H.100% (9)
- 4-Two Dimensional Parity CheckDokument9 Seiten4-Two Dimensional Parity CheckShakeel AminNoch keine Bewertungen
- SD WAN Architecture 1621768797Dokument10 SeitenSD WAN Architecture 1621768797Shakeel AminNoch keine Bewertungen
- 200-120CCNA Cisco Certified Network Associate CCNA (803) 2014-06-02Dokument8 Seiten200-120CCNA Cisco Certified Network Associate CCNA (803) 2014-06-02Christine Wood100% (1)
- Gde Mitre Attack Letter en 2020 0129Dokument7 SeitenGde Mitre Attack Letter en 2020 0129milevyoNoch keine Bewertungen
- Roshan Sajjad Curriculum Vitae: ObjectiveDokument2 SeitenRoshan Sajjad Curriculum Vitae: ObjectiveShakeel AminNoch keine Bewertungen
- VoIP Testing With TEMS InvestigationDokument20 SeitenVoIP Testing With TEMS Investigationquantum3510Noch keine Bewertungen
- BZU Vacancies for Professors and Associate ProfessorsDokument9 SeitenBZU Vacancies for Professors and Associate ProfessorsShakeel AminNoch keine Bewertungen
- TEIN Network Training WorkshopDokument2 SeitenTEIN Network Training WorkshopShakeel AminNoch keine Bewertungen
- UNDERSTANDING IELTS Week 1 Marking The Speaking Test TranscriptDokument1 SeiteUNDERSTANDING IELTS Week 1 Marking The Speaking Test TranscriptShakeel AminNoch keine Bewertungen
- Stephen CoveyDokument18 SeitenStephen CoveyAbhijith Shetty100% (2)
- Final Year Project Thesis PDFDokument62 SeitenFinal Year Project Thesis PDFShakeel Amin100% (2)
- CV Format for Vice Chancellor PostDokument1 SeiteCV Format for Vice Chancellor PostShakeel AminNoch keine Bewertungen
- Pern2 Ready Reference GuideDokument7 SeitenPern2 Ready Reference GuideShakeel AminNoch keine Bewertungen
- International Fees Guide 2015Dokument7 SeitenInternational Fees Guide 2015Shakeel AminNoch keine Bewertungen
- TEMS Operation Steps: Install and SettingDokument33 SeitenTEMS Operation Steps: Install and SettingvietlamvanNoch keine Bewertungen
- FPSC General Knowledge Paper-II exam questionsDokument2 SeitenFPSC General Knowledge Paper-II exam questionsMubashar SiddiqueNoch keine Bewertungen
- Computer Science 10Dokument4 SeitenComputer Science 10Asif SohailNoch keine Bewertungen
- Tems ParametersDokument15 SeitenTems ParametersShakeel AminNoch keine Bewertungen
- Wireless Networks: Wcdma (Part Iii)Dokument23 SeitenWireless Networks: Wcdma (Part Iii)Shakeel AminNoch keine Bewertungen
- Lecture 24Dokument22 SeitenLecture 24Shakeel AminNoch keine Bewertungen
- GK Iii 10Dokument2 SeitenGK Iii 10Mudassar NawazNoch keine Bewertungen
- Lecture 25Dokument31 SeitenLecture 25Shakeel AminNoch keine Bewertungen
- Wireless Networks: Qos in Wlan / Mobile IpDokument32 SeitenWireless Networks: Qos in Wlan / Mobile IpShakeel AminNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Python Final Exam With Answer KeyDokument4 SeitenPython Final Exam With Answer KeyAl Marjorie Abrasaldo TatingNoch keine Bewertungen
- ICTICT618 Student Assessment Tasks v1 2022Dokument15 SeitenICTICT618 Student Assessment Tasks v1 2022Thanh NguyenNoch keine Bewertungen
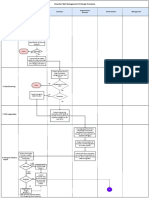
- Flowchart BAP Management of Change ProcedureDokument3 SeitenFlowchart BAP Management of Change ProcedureTevriyudha MardikaNoch keine Bewertungen
- Chapter 4 Workplace Environment and ErgonomicsDokument19 SeitenChapter 4 Workplace Environment and ErgonomicsWan AfirahNoch keine Bewertungen
- Satellite L635-S3030Dokument4 SeitenSatellite L635-S3030NafiNoch keine Bewertungen
- Analysis of Scanned Medical Prescription Using Machine LearningDokument4 SeitenAnalysis of Scanned Medical Prescription Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- SWOT analysis of an educational institutionDokument8 SeitenSWOT analysis of an educational institutionhashadsh100% (3)
- How To Draw Monkeys The LucasArts WayDokument23 SeitenHow To Draw Monkeys The LucasArts WayPaul V JohnNoch keine Bewertungen
- Optical FiberDokument177 SeitenOptical FiberManish ShrivastavaNoch keine Bewertungen
- Activity 4 Spreadsheets. InstructionsDokument14 SeitenActivity 4 Spreadsheets. InstructionsMLGen GTNoch keine Bewertungen
- RCPABAe EditionA ManualDokument108 SeitenRCPABAe EditionA ManualJuppNoch keine Bewertungen
- ECE 368 VHDL Data Types Plus BasicDokument44 SeitenECE 368 VHDL Data Types Plus BasicmanojpeehuNoch keine Bewertungen
- 429-743-1-SM (2) OJS Hermanto Jurnal Metris Unika AtmaJaya Jakarta PDFDokument8 Seiten429-743-1-SM (2) OJS Hermanto Jurnal Metris Unika AtmaJaya Jakarta PDFHermanto RuslanNoch keine Bewertungen
- 3 CNC PPT Lecture 2 DoneDokument38 Seiten3 CNC PPT Lecture 2 DoneSidhant AryaNoch keine Bewertungen
- Switching Power Supply Design: A Concise Practical Handbook: February 2022Dokument5 SeitenSwitching Power Supply Design: A Concise Practical Handbook: February 2022Wolfy gacha elamparoNoch keine Bewertungen
- Modelling of Automatic Generation Control of Two Area Power System in Matlab Software Part-2Dokument14 SeitenModelling of Automatic Generation Control of Two Area Power System in Matlab Software Part-2Mahmudul BappiNoch keine Bewertungen
- TRENDsCampus ADVANCED Hybrid Cloud Security Deck V5Dokument224 SeitenTRENDsCampus ADVANCED Hybrid Cloud Security Deck V5Muhammed İbrahim TatarNoch keine Bewertungen
- Gabriel Traistaru enDokument3 SeitenGabriel Traistaru enTraistaru GabrielNoch keine Bewertungen
- DM Yourself Character Sheet (Form-Fillable)Dokument1 SeiteDM Yourself Character Sheet (Form-Fillable)StefoNoch keine Bewertungen
- MultiplexingDokument38 SeitenMultiplexingBindhya Basini Mishra0% (1)
- List of Deepfake ToolsDokument5 SeitenList of Deepfake ToolsAntonio SalernoNoch keine Bewertungen
- ETECH 1STQTR EXAM REVIEWDokument4 SeitenETECH 1STQTR EXAM REVIEWJohnArgielLaurenteVictorNoch keine Bewertungen
- Gaussian Functions Integral TableDokument3 SeitenGaussian Functions Integral TableAllan David Cony TostaNoch keine Bewertungen
- The Sims 4 + ALL DLC & Latest Crack May 2017Dokument4 SeitenThe Sims 4 + ALL DLC & Latest Crack May 2017Akhmad Badaruddin SaktiNoch keine Bewertungen
- Kt091281im - Caraculo - Angola - 100M System Installation ManualDokument39 SeitenKt091281im - Caraculo - Angola - 100M System Installation ManualMarcos GomesNoch keine Bewertungen
- Omron h3cr PDFDokument2 SeitenOmron h3cr PDFToniNoch keine Bewertungen
- 4G Terminal Communication ProtocolDokument9 Seiten4G Terminal Communication ProtocolcvicencioNoch keine Bewertungen
- Tree (Java)Dokument27 SeitenTree (Java)akukurtNoch keine Bewertungen
- Sungrow SG250HX-V112-User ManualDokument100 SeitenSungrow SG250HX-V112-User ManualGopi Laal BahadurNoch keine Bewertungen
- The Failure of Denver International Airport's Automated BaggageDokument13 SeitenThe Failure of Denver International Airport's Automated BaggagePalaniappan Naga ElanthirayanNoch keine Bewertungen