Das könnte Ihnen auch gefallen
- Introduction to Hybrid Vehicle System Modeling and ControlVon EverandIntroduction to Hybrid Vehicle System Modeling and ControlBewertung: 4 von 5 Sternen4/5 (1)
- Final Project Report 1Dokument99 SeitenFinal Project Report 1Sikander GirgoukarNoch keine Bewertungen
- Design Optimization and Analysis of An Outer-Rotor Direct-Drive Permanent-Magnet Motor For Medium-Speed Electric VehicleDokument19 SeitenDesign Optimization and Analysis of An Outer-Rotor Direct-Drive Permanent-Magnet Motor For Medium-Speed Electric VehicleARUN KUMARNoch keine Bewertungen
- Design and Simulation of Drive Train For An Electric Two VehicleDokument25 SeitenDesign and Simulation of Drive Train For An Electric Two VehiclekunalNoch keine Bewertungen
- Model Based System Design For Electric Vehicle ConDokument19 SeitenModel Based System Design For Electric Vehicle ConAmanuelAlemaNoch keine Bewertungen
- Design Project TwoDokument10 SeitenDesign Project Twogeletayaadii100% (1)
- Sae Technical Paper SeriesDokument20 SeitenSae Technical Paper SeriesAkash ChaudhariNoch keine Bewertungen
- Chassis Dynamometer For Electric Two WheelersDokument5 SeitenChassis Dynamometer For Electric Two Wheelersdani chNoch keine Bewertungen
- Go Kart REPORTDokument5 SeitenGo Kart REPORTRayleighNoch keine Bewertungen
- Delhi Technological University: CAD and Static Analysis of IC Engine - Piston, Connecting Rod, FlywheelDokument20 SeitenDelhi Technological University: CAD and Static Analysis of IC Engine - Piston, Connecting Rod, FlywheelSubhash SharmaNoch keine Bewertungen
- Power System Design For Electric Car PDFDokument8 SeitenPower System Design For Electric Car PDFSandeep Kumar0% (1)
- A Project Seminar On: Design and Fabrication of Hybrid Electric BikeDokument19 SeitenA Project Seminar On: Design and Fabrication of Hybrid Electric BikeNaziya TazeenNoch keine Bewertungen
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDokument9 SeitenDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNoch keine Bewertungen
- BAJA Design ReportDokument55 SeitenBAJA Design ReportGauravNoch keine Bewertungen
- Designing A Final Drive For A Tracked VehicleDokument9 SeitenDesigning A Final Drive For A Tracked VehicleIroshana Thushara KiriwattuduwaNoch keine Bewertungen
- Dissertation On Electric VehiclesDokument5 SeitenDissertation On Electric VehiclesWriteMyPaperApaFormatToledo100% (1)
- Mee 512Dokument31 SeitenMee 512Gabriel UdokangNoch keine Bewertungen
- Project SynopsisDokument3 SeitenProject SynopsisAjendra HardluckNoch keine Bewertungen
- AUTOMOTIVE SYSTEM DESIGN GROUP PROJECT PresentationDokument26 SeitenAUTOMOTIVE SYSTEM DESIGN GROUP PROJECT PresentationRuston ImpellerNoch keine Bewertungen
- Gear Motors: Achieving The Perfect Motor & Gearbox MatchDokument16 SeitenGear Motors: Achieving The Perfect Motor & Gearbox MatchJohn LeeNoch keine Bewertungen
- Axlr8R Formula Racing: E-Mail - Mobile. No. - 7503744381 E-Mail - Mobile. No. - 8587870908Dokument49 SeitenAxlr8R Formula Racing: E-Mail - Mobile. No. - 7503744381 E-Mail - Mobile. No. - 8587870908mavrick_senNoch keine Bewertungen
- Thesis On Hybrid Electric VehiclesDokument7 SeitenThesis On Hybrid Electric Vehiclesjessicaspellfayetteville100% (2)
- Design of Braking System For Electric Golf-CartDokument6 SeitenDesign of Braking System For Electric Golf-Cartfariezulhakimi68Noch keine Bewertungen
- Electric Motors Reference GuideDokument166 SeitenElectric Motors Reference GuideYashveer100% (2)
- Quadcopter PresentationDokument8 SeitenQuadcopter PresentationKriti GuptaNoch keine Bewertungen
- Fabrication and Assembly of Electric Formula One CarDokument6 SeitenFabrication and Assembly of Electric Formula One CarIJRASETPublicationsNoch keine Bewertungen
- CVT2010 - Mech Hybrid Paper PDFDokument7 SeitenCVT2010 - Mech Hybrid Paper PDFSurendra SainiNoch keine Bewertungen
- Edge DriveDokument4 SeitenEdge DriveNjeru WairaguNoch keine Bewertungen
- Edge DriveDokument4 SeitenEdge DriveNjeru WairaguNoch keine Bewertungen
- RaDMI 2014Dokument17 SeitenRaDMI 2014Shin Han NxtNoch keine Bewertungen
- In-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainsDokument15 SeitenIn-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainspranjaljecNoch keine Bewertungen
- Chapter Electric VehicleDokument51 SeitenChapter Electric VehicleAmit goyalNoch keine Bewertungen
- Review On Design of Electric Formula CarDokument6 SeitenReview On Design of Electric Formula CarIJRASETPublicationsNoch keine Bewertungen
- Design and Fabrication of Solar Transport Vehicle: V.Naveen Prabhu and N.ManigandanDokument6 SeitenDesign and Fabrication of Solar Transport Vehicle: V.Naveen Prabhu and N.ManigandanDida KhalingNoch keine Bewertungen
- Optimal Selection of Motor and Gearhead in Mechatronic ApplicationsDokument10 SeitenOptimal Selection of Motor and Gearhead in Mechatronic ApplicationsMohanraj SelvakumarNoch keine Bewertungen
- SameerDokument9 SeitenSameerPushpak N UmaleNoch keine Bewertungen
- Supercharger SynopsisDokument8 SeitenSupercharger SynopsiskrunalNoch keine Bewertungen
- Electric Motors Reference GuideDokument166 SeitenElectric Motors Reference GuideHemendra Jani100% (1)
- EPA SteeringDokument6 SeitenEPA SteeringPranjul TyagiNoch keine Bewertungen
- Hybrid Vehicle ReportDokument17 SeitenHybrid Vehicle ReportMidhun S Jacob100% (1)
- Cosmic Riders PresentationDokument18 SeitenCosmic Riders PresentationSachin JoshiNoch keine Bewertungen
- Energy Efficiency of Electric Vehicles PDFDokument43 SeitenEnergy Efficiency of Electric Vehicles PDFMahesh GyawaliNoch keine Bewertungen
- DSD Ultra Lightweight Design of A Single Speed Transmission CTI Berlin Dec 2017Dokument14 SeitenDSD Ultra Lightweight Design of A Single Speed Transmission CTI Berlin Dec 2017ShivNoch keine Bewertungen
- Gearmotors: Achieving The Perfect Motor & Gearbox Match: Deeper InsightsDokument16 SeitenGearmotors: Achieving The Perfect Motor & Gearbox Match: Deeper InsightsRadu BadoiuNoch keine Bewertungen
- Paperpdf 1589980240Dokument4 SeitenPaperpdf 1589980240akashpchauhan1127Noch keine Bewertungen
- Modeling and Simulation Research On Power-Split HybridDokument6 SeitenModeling and Simulation Research On Power-Split HybridPavan PNoch keine Bewertungen
- Paper 2 PDFDokument6 SeitenPaper 2 PDFSwati NikamNoch keine Bewertungen
- Edt Seminar ReportDokument10 SeitenEdt Seminar Reportinteresting facts in worldNoch keine Bewertungen
- C B DC M e B e C 8-B MDokument9 SeitenC B DC M e B e C 8-B MIshwar GophaneNoch keine Bewertungen
- Drive by Wire Go KartDokument66 SeitenDrive by Wire Go KartBien Morfe100% (1)
- 12159Dokument27 Seiten12159NobodyNoch keine Bewertungen
- Sae j2469-2004 StartabilityDokument5 SeitenSae j2469-2004 StartabilityJaime RocanoNoch keine Bewertungen
- Prime Mover and DynamometerDokument15 SeitenPrime Mover and DynamometerWasil BabarNoch keine Bewertungen
- Design and Analysis of Four Wheel Drive Electric VehicleDokument7 SeitenDesign and Analysis of Four Wheel Drive Electric VehicleIJRASETPublicationsNoch keine Bewertungen
- IJRAR2001831 - Braking System For Golf CartDokument7 SeitenIJRAR2001831 - Braking System For Golf CartVûmmïttî ChañðĥâñNoch keine Bewertungen
- Electric Vehicle Conversion: Optimisation of Parameters in The Design ProcessDokument7 SeitenElectric Vehicle Conversion: Optimisation of Parameters in The Design Processmicovic.vptsNoch keine Bewertungen
- Proposal Fyp - Electric Motorcycle Frame - 2020452816Dokument10 SeitenProposal Fyp - Electric Motorcycle Frame - 2020452816mohammad ikhmal faiezNoch keine Bewertungen
- Plug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationDokument14 SeitenPlug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationPrateesh RajNoch keine Bewertungen
- Module 5Dokument17 SeitenModule 5Pragati ShindeNoch keine Bewertungen
- Catalogo Cny1000Dokument1 SeiteCatalogo Cny1000humbertoNoch keine Bewertungen
- Man B&W L1624 - Marine Diesel EngineDokument726 SeitenMan B&W L1624 - Marine Diesel Enginefardya faris100% (3)
- Nissan Indonesia - Price ListDokument1 SeiteNissan Indonesia - Price ListcahsogoNoch keine Bewertungen
- H2 NOx AftertreatmentsDokument13 SeitenH2 NOx AftertreatmentsFacu Spivak100% (1)
- 1a Catálogo CompletoDokument77 Seiten1a Catálogo CompletoSuyla Cabral100% (1)
- Post War MG SaloonsDokument127 SeitenPost War MG SaloonsFiona EdwardesNoch keine Bewertungen
- Catalogo de Peças TL75EDokument1.225 SeitenCatalogo de Peças TL75EMarcio Roberto de Macedo ReisNoch keine Bewertungen
- Superstrata eDokument3 SeitenSuperstrata eRajesh Kumar ChadalavadaNoch keine Bewertungen
- Volvo d12d Valve AdjustmentDokument7 SeitenVolvo d12d Valve Adjustmentali78% (9)
- Dynapac CA 250 Operations O250enDokument28 SeitenDynapac CA 250 Operations O250enkikoNoch keine Bewertungen
- ENGINE PERFORMANCE Driveability - Diesel - Non-DTC Based Diagnostics, 6.7L Diesel - Ram Pickup PDFDokument73 SeitenENGINE PERFORMANCE Driveability - Diesel - Non-DTC Based Diagnostics, 6.7L Diesel - Ram Pickup PDFcharlesNoch keine Bewertungen
- Vat 45Dokument2 SeitenVat 45mehralsmenschNoch keine Bewertungen
- SZ 150.1 MergedDokument116 SeitenSZ 150.1 MergedArif MamunNoch keine Bewertungen
- WDM-0001 On 15.6Dokument174 SeitenWDM-0001 On 15.6Shekher NikhilNoch keine Bewertungen
- Machine Condition Report: United Tractors TBKDokument2 SeitenMachine Condition Report: United Tractors TBKnanda adisNoch keine Bewertungen
- Reading Measured Value Block: Readout Specifications For General Vehicle InspectionDokument2 SeitenReading Measured Value Block: Readout Specifications For General Vehicle InspectionaritmeticsNoch keine Bewertungen
- Service: Polo 2018, T-Cross 2019, T-Roc 2018, Tiguan 2016, Tiguan RUS 2017Dokument601 SeitenService: Polo 2018, T-Cross 2019, T-Roc 2018, Tiguan 2016, Tiguan RUS 2017nkNoch keine Bewertungen
- Citroen Berlingo BrochureDokument29 SeitenCitroen Berlingo BrochurereadalotbutnowisdomyetNoch keine Bewertungen
- RAIDER R150 High REBORN (FU150SCD2L4-P31)Dokument70 SeitenRAIDER R150 High REBORN (FU150SCD2L4-P31)GAYLE GONoch keine Bewertungen
- Suspension SystemsDokument37 SeitenSuspension SystemsPankajj PokhriyalNoch keine Bewertungen
- Nevs 9-3evDokument2 SeitenNevs 9-3evRoberto Ortega MicalizziNoch keine Bewertungen
- Spare Parts Catalogue: Bajaj Auto LimitedDokument44 SeitenSpare Parts Catalogue: Bajaj Auto LimitedRodrigo Giraldo TafurNoch keine Bewertungen
- Xancan Xalilov Rasim Abutalibov Turizm İşinin Təşkili Managment Titi2001Dokument14 SeitenXancan Xalilov Rasim Abutalibov Turizm İşinin Təşkili Managment Titi2001Kenan HaqverdiNoch keine Bewertungen
- D22 Electrical SystemDokument268 SeitenD22 Electrical SystemJose Figueroa100% (8)
- Touch A Truck FlyerDokument1 SeiteTouch A Truck FlyerMatt TroutmanNoch keine Bewertungen
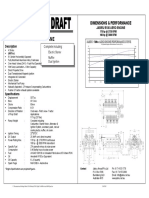
- Jabiru 5100 Aero Engine: Dimensions & PerformanceDokument1 SeiteJabiru 5100 Aero Engine: Dimensions & PerformanceG.L. ZortmanNoch keine Bewertungen
- PC130 8Dokument12 SeitenPC130 8PachacuticCartucheNoch keine Bewertungen
- Camion Dumper Articullado PDFDokument5 SeitenCamion Dumper Articullado PDFDenilson Q. ViverosNoch keine Bewertungen
- AutoSpeed - Modifying Electric Power SteeringDokument6 SeitenAutoSpeed - Modifying Electric Power SteeringgoundenaNoch keine Bewertungen
- 2014 Mercedes Benz CLS Class Owner's ManualDokument382 Seiten2014 Mercedes Benz CLS Class Owner's Manualmugavana100% (1)