Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- UM HDL Buspro Setup Tool 2 (2020!05!23)Dokument32 SeitenUM HDL Buspro Setup Tool 2 (2020!05!23)crisma tariNoch keine Bewertungen
- Smart Water Vending Machine: A.DIVYA (17S11A0469) V.MAHESH (17S11A0474) A.AMITH (17S11A0468) Mr.J.I.ChakravarthyDokument28 SeitenSmart Water Vending Machine: A.DIVYA (17S11A0469) V.MAHESH (17S11A0474) A.AMITH (17S11A0468) Mr.J.I.ChakravarthyDivya AdusumalliNoch keine Bewertungen
- Stabila 196-2 Elettronica ENDokument22 SeitenStabila 196-2 Elettronica ENJohn WalesNoch keine Bewertungen
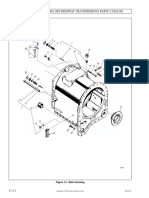
- Allison 5000/6000 Series Off-Highway Transmissions Parts CatalogDokument3 SeitenAllison 5000/6000 Series Off-Highway Transmissions Parts CatalogMaya OlmecaNoch keine Bewertungen
- Correspondence Between OHSAS 18001:2007, ISO 14001:2004 and ISO 9001:2000Dokument3 SeitenCorrespondence Between OHSAS 18001:2007, ISO 14001:2004 and ISO 9001:2000Deni NoizNoch keine Bewertungen
- 15kw - SN College - SLDDokument1 Seite15kw - SN College - SLDmebin k XavierNoch keine Bewertungen
- I Have A Website Called GravitywriteDokument6 SeitenI Have A Website Called GravitywriteNirmal KumarNoch keine Bewertungen
- Washing Machine: Service ManualDokument66 SeitenWashing Machine: Service ManualFernando AlmeidaNoch keine Bewertungen
- Distributed Systems Principles and Paradigms: Second Edition Andrew S. Tanenbaum Maarten Van SteenDokument22 SeitenDistributed Systems Principles and Paradigms: Second Edition Andrew S. Tanenbaum Maarten Van Steend0lcevita2112Noch keine Bewertungen
- Jurnal Endnote Pengabdian 2020Dokument5 SeitenJurnal Endnote Pengabdian 2020yuliuskisworoNoch keine Bewertungen
- Dmic Gujarat NewDokument2 SeitenDmic Gujarat NewArjun AgrawalNoch keine Bewertungen
- Pamantasan NG Lungsod NG MuntinlupaDokument6 SeitenPamantasan NG Lungsod NG MuntinlupaLuis AbawagNoch keine Bewertungen
- Coe1.Anncoe Forms Inst Hall Ticket Report.1-59.11Dokument1 SeiteCoe1.Anncoe Forms Inst Hall Ticket Report.1-59.11prasanthprpNoch keine Bewertungen
- Rarejob Training Skill Assessment FAQs PDFDokument28 SeitenRarejob Training Skill Assessment FAQs PDFSerene PalaceNoch keine Bewertungen
- Dse E800 Data Sheet PDFDokument2 SeitenDse E800 Data Sheet PDFbagusNoch keine Bewertungen
- Manual Tecnologia Civic 2012Dokument6 SeitenManual Tecnologia Civic 2012Mauricio Jesús Buzani RayonNoch keine Bewertungen
- Future MuseumDokument12 SeitenFuture MuseumPatriciaNoch keine Bewertungen
- PECD Mid - 2 18-19 Question BankDokument2 SeitenPECD Mid - 2 18-19 Question BankOsmium kryptonNoch keine Bewertungen
- Pbdocs Traktoren Zetor 117 41 Forterra eDokument1 SeitePbdocs Traktoren Zetor 117 41 Forterra eZoran RajčevićNoch keine Bewertungen
- Week3 Modulation BasicsDokument30 SeitenWeek3 Modulation BasicsAbdulrahman AlsomaliNoch keine Bewertungen
- Project Report HateDokument24 SeitenProject Report HateMachine Learning100% (1)
- Endress-Hauser Cerabar S PMP71 PTDokument7 SeitenEndress-Hauser Cerabar S PMP71 PTCleiton MonicoNoch keine Bewertungen
- 3PDokument4 Seiten3PWookie T BradfordNoch keine Bewertungen
- Sap Erp Financials Configuration and Design 2nd Ed 59c5c66e1723dd42ad224565Dokument1 SeiteSap Erp Financials Configuration and Design 2nd Ed 59c5c66e1723dd42ad224565VManiKishoreNoch keine Bewertungen
- IC Scrum Project Management Gantt Chart Template 10578 Excel 2000 2004Dokument6 SeitenIC Scrum Project Management Gantt Chart Template 10578 Excel 2000 2004Paulo MendesNoch keine Bewertungen
- Interview HuaweiDokument6 SeitenInterview HuaweiRaden juliNoch keine Bewertungen
- Paper 1 Searchable Symmetric Encryption With Forward Search PrivacyDokument15 SeitenPaper 1 Searchable Symmetric Encryption With Forward Search PrivacyPromise LoNoch keine Bewertungen
- 30 Rat BCU TechsheetDokument2 Seiten30 Rat BCU TechsheetBryan OngNoch keine Bewertungen
- 8a. Scratch-3.0-for-Inclusive-LearningDokument31 Seiten8a. Scratch-3.0-for-Inclusive-LearningAvram MarianNoch keine Bewertungen
- Signal and Telecommunication Workshop-2Dokument13 SeitenSignal and Telecommunication Workshop-2Sarath Kumar100% (1)