Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- LTE IdentifiersDokument12 SeitenLTE IdentifiersDONALFYNoch keine Bewertungen
- Lecture5-Karnaugh MapDokument8 SeitenLecture5-Karnaugh MapYohanes YanNoch keine Bewertungen
- Distillation Process of Crude OilDokument8 SeitenDistillation Process of Crude OilRushan VishvanathNoch keine Bewertungen
- Database Correlation Method For LocationDokument5 SeitenDatabase Correlation Method For LocationRushan VishvanathNoch keine Bewertungen
- 8 A-D ConverterDokument30 Seiten8 A-D ConverterRushan VishvanathNoch keine Bewertungen
- KmapsDokument28 SeitenKmaps148031Noch keine Bewertungen
- DiversityDokument50 SeitenDiversityGHANI810Noch keine Bewertungen
- Microcontroller To Sensor Interfacing TechniquesDokument13 SeitenMicrocontroller To Sensor Interfacing Techniquesmnohebat06Noch keine Bewertungen
- Engineering MathematicsDokument4 SeitenEngineering MathematicsRushan VishvanathNoch keine Bewertungen
- Hall EffectDokument4 SeitenHall EffectRushan VishvanathNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Performing Engineering Operations QPEO2/033N Credit Value: 14 QCF Level: 2 GLH: 64Dokument8 SeitenPerforming Engineering Operations QPEO2/033N Credit Value: 14 QCF Level: 2 GLH: 64Hatem HusseinNoch keine Bewertungen
- 5SD74631 Datasheet enDokument4 Seiten5SD74631 Datasheet enArnulfoNoch keine Bewertungen
- Shanghai Sunrise Electronics Co., LTD.: Us2Aa Thru Us2MaDokument1 SeiteShanghai Sunrise Electronics Co., LTD.: Us2Aa Thru Us2MaVinhNoch keine Bewertungen
- 9091 Series Reed Relay DatasheetDokument2 Seiten9091 Series Reed Relay DatasheetlalithkumartNoch keine Bewertungen
- LVDT Linear Variable Differential Transducers/TransformersDokument17 SeitenLVDT Linear Variable Differential Transducers/TransformersAnish RSNoch keine Bewertungen
- CH 7Dokument53 SeitenCH 7Gautam TamangNoch keine Bewertungen
- Control features of SEL-400 series relaysDokument46 SeitenControl features of SEL-400 series relaystanerNoch keine Bewertungen
- BD135 BD137 BD139: Silicon NPN Power TransistorsDokument3 SeitenBD135 BD137 BD139: Silicon NPN Power Transistorsjoedoe43Noch keine Bewertungen
- Test Switch PDFDokument10 SeitenTest Switch PDFJohan VargasNoch keine Bewertungen
- Process Nature Quality Standard Test ItemDokument1 SeiteProcess Nature Quality Standard Test ItemAbdul MoizNoch keine Bewertungen
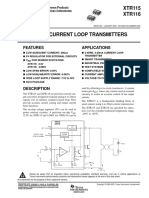
- XTR115 XTR116: Features ApplicationsDokument16 SeitenXTR115 XTR116: Features Applications1Noch keine Bewertungen
- Qdoc - Tips - 330c Electrical SchematicDokument2 SeitenQdoc - Tips - 330c Electrical SchematicAbdelbagiNoch keine Bewertungen
- Pre-Commissioning Check List of GeneratorDokument26 SeitenPre-Commissioning Check List of Generatorvikivarma14780% (15)
- TRANSFERENCIADokument28 SeitenTRANSFERENCIADenis alexander DeleonchipínNoch keine Bewertungen
- Diagrama Electrico 315l CaterpillarDokument2 SeitenDiagrama Electrico 315l CaterpillarEdwin Carrera75% (4)
- T5 Emergency KitDokument2 SeitenT5 Emergency KitWR2 ASMNoch keine Bewertungen
- Training Pemahaman Dan Pengenalan Inverter Toshiba Vf-S11Dokument18 SeitenTraining Pemahaman Dan Pengenalan Inverter Toshiba Vf-S11Nugraha Dwi100% (1)
- Linear Induction MotorDokument17 SeitenLinear Induction MotorMani Balaji TNoch keine Bewertungen
- 4 Wiring Calculations For Single Family Dwelling UnitDokument24 Seiten4 Wiring Calculations For Single Family Dwelling UnitEdryanPoNoch keine Bewertungen
- Lab Report IV Characteristics of DiodeDokument5 SeitenLab Report IV Characteristics of DiodeAamir AliNoch keine Bewertungen
- 15 Auma PDFDokument2 Seiten15 Auma PDFkad-7Noch keine Bewertungen
- Well-Site Power Supply and Distribution System User ManualDokument14 SeitenWell-Site Power Supply and Distribution System User ManualYugandhar YuguNoch keine Bewertungen
- A Survey of Non-Conventional TechniquesDokument14 SeitenA Survey of Non-Conventional TechniquesZulfiqar AliNoch keine Bewertungen
- IMPATT Diode: Name:-Tarun Kumar AP, ECE DeptDokument16 SeitenIMPATT Diode: Name:-Tarun Kumar AP, ECE DeptDr-Tarun ParasharNoch keine Bewertungen
- Standard Circuit Diagram: Av28Wt5Eps / EIS / EKS Av24Wt5Eps / EIS / EKSDokument13 SeitenStandard Circuit Diagram: Av28Wt5Eps / EIS / EKS Av24Wt5Eps / EIS / EKSvideosonNoch keine Bewertungen
- SF6 Circuit Breaker AdvantagesDokument2 SeitenSF6 Circuit Breaker Advantagesjagadeesh_kumar_20Noch keine Bewertungen
- Module 04Dokument52 SeitenModule 04Santanu bagNoch keine Bewertungen
- KBU805 TaiwanDokument2 SeitenKBU805 TaiwanroberthNoch keine Bewertungen
- Electrical Machines by Mr. S. K. Sahdev1Dokument980 SeitenElectrical Machines by Mr. S. K. Sahdev1dea boazynha100% (1)
- 325 and 325 L Excavator Electrical SystemDokument2 Seiten325 and 325 L Excavator Electrical SystemRichard Savina100% (1)