Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- New Fakes of Standing Caliph Coins / Ingrid SchulzeDokument8 SeitenNew Fakes of Standing Caliph Coins / Ingrid SchulzeDigital Library Numis (DLN)Noch keine Bewertungen
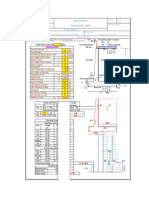
- Design of Retaining Wall Type1 As Per ACI-318-95Dokument3 SeitenDesign of Retaining Wall Type1 As Per ACI-318-95DIRACLTDANoch keine Bewertungen
- Quizzes - Chapter 15 - Accounting For CorporationsDokument6 SeitenQuizzes - Chapter 15 - Accounting For CorporationsAmie Jane Miranda100% (3)
- Machine Tool Design Classification Textbook Sources InstitutesDokument2 SeitenMachine Tool Design Classification Textbook Sources InstitutesJay SaxenaNoch keine Bewertungen
- Broncolor Download Brochures Power-Packs Senso en 01Dokument18 SeitenBroncolor Download Brochures Power-Packs Senso en 01Mie DtsNoch keine Bewertungen
- Hoshin Kanri: A write-up on lean policy deploymentDokument6 SeitenHoshin Kanri: A write-up on lean policy deploymentJay SaxenaNoch keine Bewertungen
- Nasdaq Amzn 2019 PDFDokument87 SeitenNasdaq Amzn 2019 PDFBrute1989Noch keine Bewertungen
- For ScribdDokument2 SeitenFor ScribdJay SaxenaNoch keine Bewertungen
- Cutting Tool Angles SignificanceDokument37 SeitenCutting Tool Angles SignificanceHeineken Ya PraneetpongrungNoch keine Bewertungen
- Speed Box DesignDokument1 SeiteSpeed Box DesignJay SaxenaNoch keine Bewertungen
- BCG Analysis-Report: Prepared By: Sanya Nauharia Sankara Narayanan Nikhil Jha Jay Saxena Jayant Choudhary Manju DhindwalDokument9 SeitenBCG Analysis-Report: Prepared By: Sanya Nauharia Sankara Narayanan Nikhil Jha Jay Saxena Jayant Choudhary Manju DhindwalJay SaxenaNoch keine Bewertungen
- Sheet FormingDokument4 SeitenSheet Formingvenkat_222123Noch keine Bewertungen
- Special Purpoe MachinesDokument1 SeiteSpecial Purpoe MachinesJay SaxenaNoch keine Bewertungen
- The Supply Chain, A Vital Component in Renault Performance: Press KitDokument6 SeitenThe Supply Chain, A Vital Component in Renault Performance: Press KitWilson AthisayarajNoch keine Bewertungen
- Dan's ResumeDokument2 SeitenDan's Resumedwels002Noch keine Bewertungen
- Ghost Creation-Recovery Procedure.Dokument7 SeitenGhost Creation-Recovery Procedure.Subin M SukumaranNoch keine Bewertungen
- Uputstvo Fox Led 43dle988Dokument48 SeitenUputstvo Fox Led 43dle988igor2010milosevicNoch keine Bewertungen
- "Sex Kills" by Joni Mitchell (Turbulent Indigo Album)Dokument1 Seite"Sex Kills" by Joni Mitchell (Turbulent Indigo Album)ivan a gargurevichNoch keine Bewertungen
- Flash Classroom Tutorial - Using Motion Guides in Flash Cs3 (PDF Library)Dokument4 SeitenFlash Classroom Tutorial - Using Motion Guides in Flash Cs3 (PDF Library)untukakuNoch keine Bewertungen
- Master Harold ExtractDokument2 SeitenMaster Harold ExtractJanet LNoch keine Bewertungen
- Abbey. Painted When He Was Only Nineteen (1795), A Young Turner Is Yet To Discover His OriginalDokument3 SeitenAbbey. Painted When He Was Only Nineteen (1795), A Young Turner Is Yet To Discover His Originalnshah12345Noch keine Bewertungen
- 2-Channel Cavity Combiner: DescriptionDokument1 Seite2-Channel Cavity Combiner: DescriptionBao Quoc MaiNoch keine Bewertungen
- Analisis Sonata Mozart PDFDokument10 SeitenAnalisis Sonata Mozart PDFarodcar564Noch keine Bewertungen
- Menu PlanningDokument6 SeitenMenu PlanningRochelle RagoNoch keine Bewertungen
- CPAR - National Artists for MusicDokument9 SeitenCPAR - National Artists for MusicArvin MondanoNoch keine Bewertungen
- Korean Egg Drop Sandwich 1Dokument2 SeitenKorean Egg Drop Sandwich 1El-jhei Corpuz QuilangNoch keine Bewertungen
- Chart Drives: Technical DataDokument4 SeitenChart Drives: Technical DataJohn SuarezNoch keine Bewertungen
- English quiz – No 2Dokument6 SeitenEnglish quiz – No 2naorNoch keine Bewertungen
- Worksheets Clothes PDFDokument2 SeitenWorksheets Clothes PDFPandora’s BoxNoch keine Bewertungen
- PowerPoint Advance MyAnuarDokument3 SeitenPowerPoint Advance MyAnuarNurul AfizaNoch keine Bewertungen
- Automatic fabric spreader and cutting machinesDokument12 SeitenAutomatic fabric spreader and cutting machinesPayal MahantNoch keine Bewertungen
- Lapin The Necromancer: LV Type HP Element Exp Tamable TamableDokument7 SeitenLapin The Necromancer: LV Type HP Element Exp Tamable TamableRenji kleinNoch keine Bewertungen
- Salas NGeneration Girl 3erDokument16 SeitenSalas NGeneration Girl 3erGustavoLuisMamaniQuispeNoch keine Bewertungen
- O Level m1 r5 January 2021Dokument3 SeitenO Level m1 r5 January 2021Ishika GandhiNoch keine Bewertungen
- Annotated Cairn Character SheetDokument1 SeiteAnnotated Cairn Character SheetLorenzNoch keine Bewertungen
- Sigmat Digital Mitutoyo 92833Dokument2 SeitenSigmat Digital Mitutoyo 92833Jaya DiNoch keine Bewertungen
- Sustainable Building TipsDokument2 SeitenSustainable Building TipsJonas MakiramdamNoch keine Bewertungen
- ProjectDokument11 SeitenProject12BCARitika TalwarNoch keine Bewertungen
- 2016-2018 Road Crash Data For Critical Intersection 2020Dokument186 Seiten2016-2018 Road Crash Data For Critical Intersection 2020Ferdinand Fragata RamiterreNoch keine Bewertungen
- DS-2CE76K0T-EXLPF Datasheet 20230605Dokument4 SeitenDS-2CE76K0T-EXLPF Datasheet 20230605Jorge CaleroNoch keine Bewertungen