Beruflich Dokumente
Kultur Dokumente
F
Hochgeladen von
omarkhan33Originaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
F
Hochgeladen von
omarkhan33Copyright:
Verfügbare Formate
ESTF
PROJET DE FIN DETUDES
Ddicaces.4
Remerciements5
Intro.6
Chapitre I : les moteurs asyn7
I-construction8
1-le stator9
2-le rotor.9
II-les diffrents types de ....9
1-rotor bobin (ou ..9
2-rotor cage.10
3-rotor double cage12
4-rotor encoches profondes...13
III-fonctionnement dun moteur asynchrone.14
IV-champ tournant14
V-glissement...15
VI-vitesse de synchronisme...16
VII-Plaque signaltique dun moteur asynchrone...17
Chapitre II : variation de vitesse dun moteur asynchrone.....18
I-action sur le glissement20
1-variation de la tension dalimentation statorique.20
1.1-principe..20
1.2-avantage et inconvnients du procd.....21
2-variation de la Rsistance rotorique....22
2.1-la mise en uvre du procd.22
2.2-avantages et inconvnients23
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
II-rglage de la vitesse par variation de frquence25
1-generalits...25
2-redresseur- onduleur de tension modulation de
Largeur dimpulsions(MLI)..26
3-redresseur onduleur de courant..29
4-cycloconvertisseurs.........30
III-choix des variateurs de vitesse pour moteur
asynchrone....32
1-cahier de charge fonctionnel..35
2-Linteret dinstaller un variateur de vitesse.35
IV-les composants semis conducteurs utiliss dans
la conception du variateur de vitesse.36
1-la diode de puissance...36
1.1-principe de la diode.....36
1.2-fonctionnement de la diode relle..37
1.3-le modle parfait..38
2-thyristor....38
2.1-symbole.....38
2.2-caracteristiques du thyristor..39
2. 3conditiondamorage...39
2.4-condition de blocage....39
2.5-protection contre les di/dt..40
2.6-protection contre les dv/dt.40
2.7-protection contre les courts-circuits.40
2.8-specifications techniques41
3-transistor.41
3.1-caracteristiques statiques...42
3.2-observations42
4-transistor bipolaire grille isole.43
4.1caracteristiq..44
4.2-structure.44
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
5-triac.45
Chapitre III : protection relie au variateur46
I-Presentation47
1-objectif47
2-Necessite de protections adaptes48
II-protection contre les surintensits...48
1-protection intgre aux variateurs48
1.1-protection de surcharge moteur48
1.2-protectio contre les courts-circuits ou ligne
en aval du variateur....48
1.3-autres protections intgres aux variateurs..49
1.4-actions des protections in.49
2-protection extrieures aux varia..50
2.1-emplacements des dispositif50
III-protection des personnes..52
1-les risques lis aux dfauts disolement..52
1.1-le contact direct...53
1.2-le contact indirect53
Annexe54
Bibliographie.63
Conclusion..64
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Avec une grande joie nous ddions ce travail :
Notre chre encadrant Mr.ERROUHA, qui nous a
tout donn pour russir ce projet.
Mr.SAFOUANE Directeur de lcole suprieure de
Technologie, ainsi que notre chef de dpartement
Mr.TALBI qui donnent toujours leurs mieux pour que
les tudiants aient une formation assez complte
pour avoir le minimum de difficults lors de leur vie
professionnelle.
En fin nous ddions ce travail, aux tres les plus
chers au monde : nos parent et nos frres et surs.
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
A loccasion de ce travail nous adressons nos
chaleurs remerciements tous ceux qui ont
contribu laccomplissement de ce projet.
Nos remercions profondment :
Notre encadrant Mr.ERROUHA qui nous apport le
soutien dont on a besoin le long de la prparation de
ce projet.
Mr.TALBI
chef
du
dpartement
Maintenance
Industrielle qui veille toujours a ce que tous se
passe en bonnes conditions avec ses tudiants.
On exprime aussi nos remerciements Monsieur
SAFOUNE, le Directeur de LEST FES pour la
qualit des tudes quon a effectu.
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Le moteur asynchrone ou moteur dinduction est actuellement le moteur
lectrique dont lusage est le plus rpandu dans lindustrie .son principal avantage
rside dans labsence de contact lectrique glissants, ce qui conduit une structure
simple et robuste facile construire.le domaine de puissance va de quelque watts
plusieurs mgawatts.
Reli directement au rseau industriel tension et frquence constantes.il
tourne une vitesse peu diffrente de la vitesse synchrone ; cest lui qui est utilis
pour la ralisation de la quasi-totalit des entranements lectrique vitesse
constante.
Mais le moteur asynchrone permet aussi la ralisation dentranement
vitesse variable et la place quil prend dans ce domaine ne cesse de crotre.
Il y a un grand nombre de procdes de variation de vitesse du moteur
asynchrone qui seront le sujet principale de ce projet.
En effet notre travail sera expliqu travers les chapitres suivants :
Les moteurs asynchrones.
Variation de la vitesse du moteur asynchrone.
Protection relie au variateur.
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Ce chapitre est consacr la prsentation des moteurs asynchrones triphass,
moteurs les plus utiliss pour l'entranement des machines.Ces moteurs simposent
en effet dans un grand nombre d'applications en raison des avantages qu'ils
prsentent : normaliss, ils sont robustes, simples dentretien, faciles mettre en
oeuvre et de faible cot.
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
I.CONSTRUCTION :
Figure (1) : moteur asynchrone.
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Le moteur asynchrone est constitu de deux parties :
1-Le stator :
Cest la partie fixe du moteur. Une carcasse en
fonte ou en alliage lger renferme une couronne tles
minces (de l'ordre de 0,5 mm d'paisseur) en acier au
silicium. Les tles sont isoles entre elles par oxydation
ou par un vernis isolant. Le feuilletage du circuit
magntique rduit les pertes par hystrsis et par courants
de Foucault.Les tles sont munies dencoches dans
lesquelles prennent place les enroulements statoriques
destins produire le champ tournant (trois enroulements
dans le cas d'un moteur triphas). Chaque enroulement
est constitu de plusieurs bobines. Le mode dcouplage
de ces bobines entre elles dfinit le nombre de paires de
ples du moteur, donc la vitesse de rotation.
Figure 2 : Stator
2-Le rotor :
Cest llment mobile du moteur. Comme le circuit magntique du stator, il
est constitu d'un empilage de tles minces isoles entre elles et formant un
cylindre clavet sur l'arbre du moteur.Cet lment, de par sa technologie, permet de
distinguer deux familles de moteurs asynchrones : ceux dont le rotor est dit cage
, et ceux dont le rotor bobin est dit bagues .
II.LES DIFFERENTS TYPES DE ROTOR :
1. Rotor bobin (ou bagues) :
Dans des encoches pratiques la priphrie du rotor sont logs des
enroulements identiques ceux du stator. Gnralement le rotor est triphas.
Une extrmit de chacun des enroulements est relie un point commun
(couplage toile). Les extrmits libres peuvent tre raccordes sur un coupleur
centrifuge ou sur trois bagues en cuivre, isoles et solidaires du rotor. Sur ces
bagues viennent frotter des balais base de graphites raccords au dispositif de
dmarrage (figure 3).
En fonction de la valeur des rsistances insres dans le circuit rotorique, ce
type de moteur peut dvelopper un couple de dmarrage slevant jusqu 2,5 fois
le couple nominal.
Le courant au dmarrage est sensiblement proportionnel au couple dvelopp
sur larbre moteur.
MAINTENANCE INDUSTRIELLE
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Cette solution est de plus en plus abandonne au profit de solutions
lectroniques associes un moteur cage standard. En effet ces dernires
permettent de rsoudre des problmes de maintenance (remplacement des balais
dalimentation du rotor uss, entretien des rsistances de rglage), de rduire
lnergie dissipe dans ces rsistances et aussi damliorer de faon importante le
rendement de linstallation.
Figure (3) : schma dun moteur asynchrone bagues.
2. Rotor cage :
Le circuit du rotor est constitu de barres conductrices rgulirement
rparties entre deux couronnes mtalliques formant les extrmits, le tout rappelant
la forme dune cage dcureuil. Bien entendu, cette cage est insre lintrieur
dun circuit magntique analogue celui du moteur rotor bobin (figure 4).
Les barres sont faites en cuivre, en bronze ou en aluminium, suivant les
caractristiques mcaniques et lectriques recherches par le constructeur. Dans
certaines constructions, notamment pour des moteurs basse tension (par exemple
230/400 V), la cage est ralise par coule et centrifugation daluminium.
MAINTENANCE INDUSTRIELLE
10
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
On dmontre que, si le nombre de barres Nb est suffisamment grand (soit, en
pratique, Nb 8 p), la cage se transforme automatiquement en un circuit polyphas
de polarit adquate.
Ce type de moteur, beaucoup plus ais construire que le moteur rotor
bobin, est dun prix de revient infrieur et a une robustesse intrinsquement plus
grande. Il nest donc pas tonnant quil constitue, et de loin, la plus grande partie
du parc des moteurs asynchrones en service.
Son inconvnient majeur est quil ne permet pas dinsrer un rhostat et quil
a, au dmarrage, de mauvaises performances (courant lev et couple faible). Cest
pour remdier cette situation quont t dvelopps deux autres types de moteur
(rotor double cage et rotor encoches profondes).
Figure (4) : schma dun rotor cage
MAINTENANCE INDUSTRIELLE
11
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
3. rotor double cage :
Le rotor comporte deux cages coaxiales (figure 5) :
lune (frquemment ralise en laiton ou en bronze), externe, rsistance
relativement leve, est place prs de lentrefer ;
lautre (en cuivre), interne, de plus faible rsistance, est noye dans le fer,
ayant ainsi une inductance de fuites suprieure la premire.
Au dmarrage, le courant rotorique, de frquence gale la frquence f du
rseau dalimentation, se rpartit de faon inversement proportionnelle aux
ractances des cages, qui sont alors grandes devant les rsistances. Dans ces
conditions, cest la cage externe qui est parcourue par le maximum de courant ; sa
relativement forte rsistance rduit lappel de courant et accrot le couple.
Au contraire, lorsque le moteur atteint son rgime nominal de
fonctionnement, normalement caractris par un faible glissement g et une
frquence basse gf, ce sont les rsistances qui contrlent la rpartition du courant,
ce qui favorise la cage interne de faible rsistance.
On peut, ainsi, obtenir des couples de dmarrage CD de deux trois fois
suprieurs ceux du rotor simple cage.
La figure (7) montre, en fonction de la vitesse, la variation du couple dun
moteur double cage, dont la cage externe est calcule pour obtenir le couple
maximal au dmarrage.
Figure 5 Rotor double cage : schma figure 6 : coupe d'un rotor cage
encoches profondes
MAINTENANCE INDUSTRIELLE
12
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Figure 7 Moteur double cage : courbe du couple
en fonction de sa vitesse
4. rotor encoches profondes :
Le rotor double cage est beaucoup plus difficile construire que le rotor
simple cage et est donc dun cot plus lev.
On peut pallier cet inconvnient, tout en gardant une partie de ses avantages,
en construisant une cage rotorique simple avec des barres trs plates senfonant
profondment dans le circuit magntique (figure 8 a) :
lors du dmarrage, la ractance, qui crot avec la profondeur, tend
imposer aux lignes de courant de se concentrer prs de la priphrie et
leur assigner ainsi une section de conducteur rduite et une rsistance
accrue ;
en revanche, en marche normale, cet effet disparat et les lignes
de courant, en occupant la pleine section de la barre, retrouvent
dun circuit de faible rsistance
Ce type de moteur, dit encoches profondes, est trs utilis, notamment
dans le cas des moteurs haute tension et fort couple de dmarrage. Il prsente
cependant linconvnient dentraner une augmentation du coefficient de dispersion
des enroulements, donc une diminution du facteur de puissance du moteur, et, bien
sr, dexiger un diamtre de rotor plus important.
Pour remdier ce dernier inconvnient, on a parfois fait appel des
conducteurs ayant des formes plus compliques, en trapze (figure 8b), voire en L
(la base du L tant en fond dencoche).
MAINTENANCE INDUSTRIELLE
13
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Figure 8 Encoches profondes (a) et conducteurs en trapze (b) : schmas
III. FONCTIONNEMENT DUN MOTEUR ASYNCHRONE :
Le champ tournant cre par lenroulement satorique induit des courants dans le
stator, ces courants crent leur tour un champ.Le bobinage rotorique peut donc
sassimiler un lectro-aimant dont les ples vont saccrocher ceux du champ
tournant, le rotor tourne.
Si la vitesse de rotor gale celle du champ tournant,les courants rotoriques
sannulent,le champ cre par ces courants disparat ,le couple moteur sannule
aussi,pour cette raison que ce type de moteur tourne une vitesse infrieur au
synchronisme ,do le nom de moteur asynchrone .
IV.CHAMP TOURNANT :
Une bobine parcourue par un courant alternatif cre un champ magntique
alternatif. On vrifie facilement qu'en un point, l'induction alternative d'amplitude b
= Bm sin wt est quivalente deux champs tournant en sens contraires la vitesse
w, chacun d'eux ayant une amplitude gale Bm/2.
Un ensemble de trois bobines identiques, disposes aux trois sommets d'un
triangle quilatral, de manire que leurs axes se trouvent dans le mme plan et
fassent entre eux un angle de 120, et parcourues par des courants triphass,
produisent au centre gomtrique de l'ensemble un champ tournant une vitesse
gale la pulsation des courants. Si chaque bobine cre en ce centre un champ
d'amplitude Bm, la somme des trois champs est reprsente par un vecteur d'une
amplitude constante, gale 3 Bm/2
MAINTENANCE INDUSTRIELLE
14
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Figure (9) : moteur un paire de ples.
V.GLISSEMENT :
Le couple moteur ne peut exister que si un courant induit circule dans la spire.
Ce couple est dtermin par le courant qui circule dans la spire et qui ne peut
tre que sil existe une variation de flux dans cette spire. Il faut donc quil y ait une
diffrence de vitesse entre la spire et le champ tournant.Cest la raison pour
laquelle un moteur lectrique fonctionnant suivant le principe que nous venons de
dcrire est appel moteur asynchrone. La diffrence entre la vitesse de
synchronisme (Ns) et celle de la spire (N) est appele glissement (g) et sexprime
en % de la vitesse de synchronisme.
g = [(Ns - N) / Ns] x 100
En fonctionnement, la frquence du courant rotorique sobtient en multipliant
la frquence dalimentation par le glissement. Au dmarrage, la frquence du
courant rotorique est donc maximale et gale celle du courant statorique. La
frquence du courant statorique diminue progressivement au cours de la mise en
vitesse du moteur.
Le glissement en rgime tabli est variable suivant la charge du moteur et
selon le niveau de la tension dalimentation qui lui est appliqu. Il est dautant plus
faible que le moteur est peu charg et il augmente si le moteur est aliment en
dessous de la tension nominale correspondant la frquence dalimentation.
MAINTENANCE INDUSTRIELLE
15
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
VI.VITESSE DE SYNCHRONISME :
La vitesse de synchronisme des moteurs asynchrone triphass est
proportionnelle la frquence du courant dalimentation et inversement
proportionnelle au nombre de paires de ples constituant le stator.
Par exemple : Ns = 60 f/p
Avec : Ns : vitesse de synchronisme en tr/min,
f : frquence en Hz,
p : nombre de paires de ples.
Pour les frquences industrielles de 50 Hz et 60 Hz et pour une frquence de
100 Hz, les vitesses de rotation du champ tournant, ou vitesses de synchronisme, en
fonction du nombre de ples, sont donnes dans le tableau de la figure 5.
Dans la pratique, il nest pas toujours possible daugmenter la vitesse dun
moteur asynchrone en lalimentant sous une frquence suprieure celle pour
laquelle il est prvu, mme si la tension est adapte.Il convient en effet de vrifier
si ses conceptions mcaniques et lectriques le permettent.
Nombre de ples
2
4
6
8
10
12
16
Vitesse de synchronisme en tr/min
3000
1500
1000
750
600
500
375
3600
1800
1200
900
720
600
540
6000
3000
2000
1500
1200
1000
750
Tableau 1 : Vitesses de synchronisme fonction du
nombre de ples et de la frquence du
courant
MAINTENANCE INDUSTRIELLE
16
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
VII-Plaque signaltique d'un moteur asynchrone :
Soit on ralise un couplage toile (le plus frquent) et on doit prendre en
compte les valeurs de tensions et de courants de la troisime ligne, soit on
ralise un couplage triangle et on prend en compte celles de la quatrime
ligne.
A l'aide de grandeurs lectriques fournies : tensions entre phases, intensits
des courants de ligne et facteur de puissance, il est possible de calculer la
puissance absorbe et d'en dduire le rendement de la machine fonctionnant
au rgime nominal.
Et
MAINTENANCE INDUSTRIELLE
17
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
La pulsation du rotor dun moteur asynchrone est :
avec
g : glissement
MAINTENANCE INDUSTRIELLE
18
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
p : nombre de paires de ples
: pulsation du rotor (en rd/s)
s : pulsation de synchronisme(en rd/s)
f : frquence de la tension (Hz)
: pulsation de la tension (rd/s)
Le rglage de la vitesse de rotation du moteur peut donc tre obtenu par :
Action sur la frquence de la tension dalimentation statorique.
convertisseurs de frquence lectromcaniques (gros alternateur pilotant
plusieurs moteurs asynchrones tournant la mme vitesse)
convertisseurs statiques (onduleurs de courant, de tension, M.L.I, contrle
vectoriel de flux, cycloconvertisseurs)
Action sur le glissement
action sur la tension dalimentation statorique (autotransformateur,
gradateur)
rhostat de glissement au rotor
cascade de rcupration (cascade hyposynchrone)
MAINTENANCE INDUSTRIELLE
19
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
I .ACTION SUR LE GLISSEMENT :
1. Variation de la valeur de la tension dalimentation statorique :
1.1 Principe :
La mise en uvre de ce procd est trs simple ; il suffit dinterposer un gradateur
triphas entre le rseau et les bornes du moteur.Par phase deux thyristors monts en
tte-bche contrlent lun laller du courant, lautre le retour, en retardant chaque
alternance lentre en conduction du thyristor correspondant, on diminue la tension
applique au moteur
Figure (10)
Figure (11)
Ce procd utilise le fait qu un glissement donn le couple du moteur
asynchrone est proportionnel au carr de la tension dalimentation .On ne peut
lemployer que pour lentranement de charge dont le couple croit trs vite en
fonction de la vitesse Nr.
Autrement dit, ce rglage de vitesse est surtout utilis pour lentranement de
pompes ou de ventilateur ; charge dont le couple est sensiblement proportionnel au
carr de la vitesse.
MAINTENANCE INDUSTRIELLE
20
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
1.2 Avantages& Inconvnients du procd :
Ce procde de variation de vitesse prsente lavantage de pouvoir tre utilis sur le
moteur cage.
Dautre part il est trs facile mettre en uvre .on fait varier on fait varier la
tension en interposant entre le rseau et le stator un gradateur .cest--dire un des
convertisseurs statiques les plus simple .chaque phase du gradateur est form de
deux thyristors monts en parallle inverse (figure (10)) ou, en faible puissance, un
simple triac.Pour rduire la tension dalimentation, on diminue la dure de
lintervalle ou, pendant chaque alternance, on laisse passer le courant.
Ce procd prsente, de part son principe mme, une limitation quant son
domaine dapplications .il ne peut tre utilis que si la le couple de la charge
entrane est ngligeable larrt et augmente trs vite avec la vitesse .on utilise
pour lentranement de pompes ou de ventilateurs dont le couple est sensiblement
proportionnel au carr de la vitesse.
Ce procde prsente trois inconvnients principaux :
La rduction de vitesse se fait au dtriment de rendement puisquelle est
obtenue par augmentation du glissement .si le moteur glisse de 50%, les
pertes joule rotoriques elle seules prsentent 50% de la puissance
traversant lentrefer ; si lon ajoute toutes les autres pertes, on obtient un
rendement nettement infrieur 50%.
Laugmentation des pertes joule rotoriques quand on rduit la tension
dalimentation pose le problme de lchauffement .comme il sagit le plus
souvent de moteurs auto-ventils, en rduisant la tension dalimentation on
accrot les pertes vacuer et on diminue lefficacit de leur vacuation .il
faut dclasser le moteur.
Enfin le gradateur est convertisseur trs polluant .les courant pris au rseau et
fournis au moteur ont un taux dharmoniques trs important .ces
harmoniques perturbent le rseau et diminuent encore les performances du
moteur.
Aussi ce procd est-il ordinaire rserv aux entranements de faible puissance.
MAINTENANCE INDUSTRIELLE
21
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
.
2. Variation de la rsistance rotorique :
2.1 La mise en uvre du procd :
Il est possible de rgler la vitesse dun moteur asynchrone en augmentant la
rsistance du rotor laide dun rhostat, appel rhostat de glissement figure (12).
Figure (12) :schma illustrant la disposition de rhostat de glissement
Figure (13)
Les caractristiques mcaniques du moteur varient selon la figure (13).
MAINTENANCE INDUSTRIELLE
22
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
2 .2 Avantages & inconvnients :
Ce procd prsente les avantages suivants :
Il est utilisable quelque soit la charge entrane puisque lon reste toujours
sur la partie stable des caractristiques mcaniques.
Les pertes joule dues laugmentation du glissement sont dissipes dans le
rhostat et non plus dans le rotor lui-mme.
Mais il prsente aussi des inconvnients :
Ce nest pas une vraie variation de vitesse ; on ne peut pas rgler la vitesse
vide qui reste voisine de la vitesse synchrone .Cest variation de la chute de
vitesse en charge.
Surtout en augmentant le glissement on augmente les pertes joule dues aux
courants rotoriques et on diminue le rendement.
Il est mauvais au point de vue technique, car les caractristiques dans leur
partie utile, sont concourantes.
Il est mauvais de point de vue conomique, car la consommation dnergie
dans le rhostat est dautant plus importante que la chute de vitesse est plus
leve (figure 13).
Pour liminer la consommation dnergie dans la rsistance du glissement on
utilise le procd de rcupration dnergie, reprsent par la figure 14.
MAINTENANCE INDUSTRIELLE
23
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Figure 14 : cascade hyposynchrone
Ce cascade hyposynchrone est constitu par :
Un pont redresseur six diodes qui transforme les courants rotoriques de
frquence f en un courant continu i
U n onduleur non autonome six thyristors qui transforme le courant i en un
systme triphas de courant alternatifs de frquence f.
Un transformateur qui transforme la tension v1en une tension v2avec une
frquence constante fs.
Le transformateur est choisi avec un rapport de transformation permettant le
glissement maximal souhait.
La rcupration de l nergie rotorique assure un excellent rendement, voisin
de celui du moteur seul.
Le facteur de puissance de la cascade est plus faible que celui du moteur seul
et il y a ncessit de le relever avec une batterie de condensateurs.
La cascade ne peut dmarrer seule : il est ncessaire de prvoir un dispositif
annexe de dmarrage par rsistances rotoriques.
MAINTENANCE INDUSTRIELLE
24
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Avantages de la cascade hyposynchrone :
o En agissant sur langle de retard des thyristors on peut faire varier la
puissance renvoye dans le rseau cest--dire la puissance P et par la
suite la frquence de rotation du moteur.
o Au lieu de dissiper lchauffement dans le rotor .on rcupre lnergie
pour linjecter dans le rseau lectrique.
o Avec ce procd il ny a plus de pertes joules, dues la variation de
vitesse, dans le rotor.
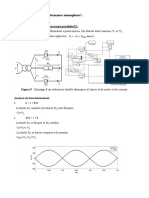
II-REGLAGE DE LA VITESSE PAR VARIATION DE FREQUENCE :
1-Gnralites :
La solution qui parat, a priori, la plus simple pour faire varier la vitesse dun
moteur asynchrone est celle qui consiste faire varier la frquence de sa source
dalimentation. La mise en oeuvre de ce principe pour des applications industrielles
utilise un convertisseur triphas-triphas qui transforme le systme industriel
triphas de tensions de frquence et damplitude fixes, aux lgres fluctuations
normales prs, en un systme triphas de tensions ou de courants de frquence et
damplitude matrises.
Les principaux types de convertisseurs employs pour les moteurs asynchrones
sont des convertisseurs indirects de frquence, cest--dire qui utilisent un tage
intermdiaire frquence nulle (tension ou courant continu) par lassociation dun
convertisseur alternatif continu (redresseur) et dun convertisseur continu alternatif
(onduleur). Plusieurs technologies de convertisseurs reposent sur ce principe, selon
que ltage frquence nulle est constitu dune source de tension ou dune source
de courant et selon les formes dondes produites par londuleur.
Des convertisseurs directs de frquence, dnomms cycloconvertisseurs, qui
ralisent la conversion de frquence sans recourir un tage intermdiaire
frquence nulle, sont aussi utiliss pour des cas particuliers dentranements par
moteurs asynchrones de forte puissance (quelques mgawatts).
MAINTENANCE INDUSTRIELLE
25
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
2-Redresseur-onduleur de tension modulation de largeur dimpulsions (MLI) :
Le schma de principe de ce convertisseur de frquence est prsent sur la figure
15a. Il comporte :
un redresseur triphas diodes qui dlivre une tension continue
damplitude pratiquement constante (pour une tension alternative
dalimentation constante) ;
un tage de filtrage, comportant principalement un condensateur de
forte capacit ;
un onduleur de tension dlivrant des impulsions de tension
damplitude fixe mais de largeur variable, qui, en moyenne,
restituent un systme de tensions damplitude et de frquence
variables ; en gnral, la tension fondamentale est damplitude
proportionnelle la frquence de faon maintenir un flux
magntique (rapport U/f) constant dans le moteur sur toute la plage
de vitesse (figure 15b).
Londuleur ncessite lutilisation dinterrupteurs lectroniques de puissance
entirement commandables, cest--dire dont la mise en conduction et le blocage
sont matrisables chaque instant ; cest pourquoi on utilise actuellement :
des transistors IGBT, systmatiquement pour les variateurs de
puissance infrieure 200 kW environ ; les variateurs MLI
transistors IGBT deviennent de plus en plus usuels pour des
puissances suprieures, atteignant 1 MW ;
des thyristors GTO, pour des puissances de quelques centaines de
kilowatts 3 MW environ
Ce convertisseur est actuellement le plus employ pour les entranements
industriels de faible et moyenne puissances. Cette solution est attractive, car elle
utilise un moteur asynchrone cage et offre une grande souplesse de
fonctionnement. De plus, lutilisation de transistors IGBT et du contrle commande
numrique a permis daugmenter les performances densemble tout en diminuant
les cots de ces matriels.
MAINTENANCE INDUSTRIELLE
26
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Figure (15) : convertisseur de frquence modulation de largeur dimpulsion.
MAINTENANCE INDUSTRIELLE
27
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Pour liminer les harmoniques de rang pair et les harmoniques de rang 3, le rapport
de modulation m=fv/fu est impair, multiple de 3 et de lordre de la centaine (dans
lexemple ci-dessous m=9).
Le courant, filtr par linductance de lenroulement est quasi - sinusodal.
Allure des courant et tension (onduleur monophas) pour des rapports de
modulation diffrents:
MAINTENANCE INDUSTRIELLE
28
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
3- Redresseur-onduleur de tension pleine-onde :
Ce convertisseur est constitu dun redresseur thyristors dlivrant une tension
continue damplitude variable et dun onduleur transistors ou thyristors GTO
alimentant le moteur laide dimpulsions rectangulaires de tension de dure
proportionnelle la frquence et damplitude variable.Ce montage est
principalement utilis pour les moteurs de moyenne puissance, jusqu 3 MW
environ, et pour des frquences dalimentation pouvant atteindre plusieurs
centaines de hertz.
4- Redresseur-onduleur de courant :
Ce convertisseur est constitu par un redresseur thyristors en pont Graetz,
command en courant, et dun onduleur autonome thyristors, qui dlivre au
moteur des impulsions de courant de forme rectangulaire de frquence et
damplitude variables. Cette technologie est en dclin au bnfice des
convertisseurs MLI et elle nest utilise que pour des applications particulires,
ncessitant notamment un fonctionnement en freinage lectrique, comme le levage.
MAINTENANCE INDUSTRIELLE
29
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
5-Cycloconvertisseurs :
On peut convertir directement la frquence du rseau industriel en une
frquence variable plus faible laide dun Cycloconvertisseur commutation
naturelle. Ce convertisseur est constitu (figure 16) de deux ponts de Graetz par
phase et ncessite donc, en triphas, 36 soupapes. En commutant les angles de
retard des diffrents thyristors, on peut, par un procd dchantillonnage, obtenir
une tension de sortie qui soit, en moyenne, sinusodale. cause des difficults dues
aux harmoniques et la commutation, la frquence maximale que peut dlivrer le
Cycloconvertisseur est de lordre du tiers de la frquence dentre.
La vitesse dun moteur asynchrone ainsi aliment ne peut donc dpasser 1 000
tr/min.En pratique dailleurs, les cycloconvertisseurs sont employs pour entraner
des moteurs plutt lents, tournant au plus 600 tr/min ou moins (broyeurs de
cimenterie par exemple), mais avec des puissances qui peuvent atteindre 10 MW.
Etude simplifie pour une phase du moteur :
MAINTENANCE INDUSTRIELLE
30
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Figure 16 Cycloconvertisseur : schma
MAINTENANCE INDUSTRIELLE
31
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
III- Choix des variateurs de vitesse pour moteurs asynchrones :
Les technologies dentranements vitesse variable pour moteurs asynchrones sont
nombreuses et viennent complter les technologies disponibles pour les moteurs
courant continu et les moteurs synchrones. Le choix de la technologie et de la
structure du convertisseur dpend de nombreux facteurs lis lapplication vise.
Parmi les principaux facteurs techniques de choix figurent :
la puissance et la vitesse nominales ;
le rgime dutilisation (utilisation en rgime permanent ou
intermittent) ;
la plage de variation de vitesse et le domaine de fonctionnement
dans le plan puissance-vitesse (1 quadrant, 2 quadrants, 4quadrants)
;
le type de machine entrane (inertie, caractristique de couple
rsistant selon la vitesse) ;
la prcision de contrle de couple et de vitesse ;
la tension du rseau dalimentation ;
les contraintes dinstallation (place disponible, degrs de
protection, etc.).
Enfin, un critre essentiel est bien sr le cot total dinvestissement de
lentranement comprenant le cot du variateur, du moteur et de leur installation.
Le cot dexploitation de lentranement (maintenance, cot dindisponibilit,
pertes nergtiques) est un critre conomique supplmentaire de choix.
Le tableau 2 prsente les principales caractristiques des technologies
dentranements vitesse variable pour moteurs asynchrones que nous avons
voques prcdemment. On y a aussi rappel, titre de comparaison, les
caractristiques dentranements par moteurs synchrones. Toutes les technologies
prsentes sont disponibles sur le march franais. Le convertisseur MLI est la
solution qui constitue loffre technique la plus tendue, car de nombreux
constructeurs proposent ce produit.Les moteurs asynchrones aliments frquence
variable prsentent le srieux avantage de ne donner aucune surintensit
apprciable lors du dmarrage, car les convertisseurs permettent de rgler la
frquence et la tension du moteur pendant le dmarrage de sorte nappeler au
rseau quun courant voisin du courant nominal.Ils ne ncessitent donc aucun
surdimensionnement en puissance du circuit dalimentation et peuvent dmarrer
aussi souvent que ncessaire sans risques de surchauffement.
MAINTENANCE INDUSTRIELLE
32
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Cependant, comme tout convertisseur lectronique de puissance industriel, les
variateurs lectroniques absorbent au rseau des courants entachs dharmoniques
qui induisent sur le rseau dalimentation des tensions harmoniques susceptibles de
perturber le fonctionnement des rcepteurs aliments par ce mme rseau.
Il faut donc veiller ce que les harmoniques engendrs par ces
convertisseurs ne polluent pas le rseau. En cas de difficults, il existe des solutions
qui permettent de rsoudre les problmes en rduisant le taux de pollution
harmonique. Cela peut tre soit ler accordement, lorsque cela est possible, une
source de plus forte puissance, soit lutilisation de convertisseurs structure
adapte (utilisation dun pont redresseur structure dodcaphase par exemple),
soit linstallation de filtres antiharmoniques composants passifs voire actifs (un
convertisseur pilot de faon adquate engendre un spectre dharmoniques qui
compense le spectre dharmoniques perturbateurs)
MAINTENANCE INDUSTRIELLE
33
Hamid Elachbour /Essebbar Abdeljalil
ESTF
MAINTENANCE INDUSTRIELLE
PROJET DE FIN DETUDES
34
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
1-cahier de charge fonctionnel :
Le variateur de vitesse doit assurer les fonctions suivantes :
Varier dune manire continue la vitesse tout en vitant les -coups
mcaniques.
Avoir un couple ncessaire pour effectuer les diffrents mouvements de la
machine (levage /translation)
Fonctionner dans les quatre quadrants.
Avoir des performances dynamiques trs leves.
Faciliter lexploitation et la maintenance du systme.
Avoir une fiabilit leve.
Avoir un rapport qualit/cot meilleur.
Prvoir les mesures de protection ncessaires la scurit de linstallation
Standarisation des pices de rechange.
2-linteret dinstaller un variateur de vitesse :
En analysant les diffrents procds de variation de vitesse, on dduit que le
convertisseur de frquence rpond parfaitement au cahier des charges fonctionnel.
En effet, les variateurs de vitesse nous procurent :
o Une rduction de cot dinvestissement et dentretien.
o Une large gamme de variation de vitesse.
o La rduction de lintensit au dmarrage des moteurs, ce qui autorise des
sections de cbles plus faible et des appareillages dalimentation du moteur
de moindre calibre.
o Une limitation du couple du moteur qui permet dviter les risques de casse
du matriel.
o Une protection thermique du moteur.
o Un rendement nergtique lev.
o Une simplicit de commande et dintervention.
o Une modernisation de la commande des machines existantes aussi bien que
la place dun quipement trs automatis.
o Faciliter dimplantation.
MAINTENANCE INDUSTRIELLE
35
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
o Simplicit dutilisation.
MAINTENANCE INDUSTRIELLE
36
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
IV-Les composants semi-conducteurs utiliss dans la conception du variateur de
vitesse :
1-la diode de puissance :
Ds quil sagit de parler de composants de puissance, on sattache
immdiatement au modle externe de llment. La prsentation du composant rel
volue vers le modle parfait pour voquer la fonction de llment.
1 1.1-Principe de la diode :
Sous le point de vue de llectronique de puissance, la diode est un interrupteur
non commandable. Reprenant le principe de la jonction PN de la diode signal ,
celle-ci utilise une jonction PIN (I comme Intrinsque) constitue dun empilement
P+/N/N+ (Figure 17). La zone intermdiaire N assure une bonne tenue en
tension.
Figure 17 : diode PIN
Figure 18 : symbole de la diode de puissance et notations.
MAINTENANCE INDUSTRIELLE
37
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
1.2-Fonctionnement de la diode relle :
1.2.1-Caractristique statique tension-courant :
Repre en convention rcepteur (Figure 18), la diode prsente une
caractristique tension-courant dissymtrique (Figure 19).
En polarisation directe la tension vD est positive et prsente les imperfections
suivantes :
Tension de seuil VD0 (de 0,8 2 V) ;
Rsistance dynamique rD0 (de 10 100 m).
En inverse, le courant est quasi nul puis crot brutalement lors du claquage qui
est un phnomne destructif pour le composant (VRM de 200 1000 V
couramment).
Figure 19: caractristique tension-courant de la diode.
A ces caractristiques propres du composant, le constructeur indique les
grandeurs ne pas dpasser en fonctionnement :
1 Le courant direct moyen IF0 (F pour Forward) ;
2 Le courant direct efficace IFeff.
MAINTENANCE INDUSTRIELLE
38
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
1 1.3-Le modle parfait :
Pour les tudes des montages utilisant des diodes de puissance, on utilise les
modles plus ou moins simplifis indiqus dans le Tableau 3 sajoutent
progressivement les imperfections.
Tableau 3 : les modles courants de la diode en EnPu.
2-Thyristor :
2.1-Symbole :
MAINTENANCE INDUSTRIELLE
39
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
2.2- Caractristiques du thyristor :
On remarquera que selon l'importance du courant de gchette la valeur de
la tension directe pour laquelle se produit le dclenchement est diffrente.
2.3-condition damorage :
tension anode-cathode positive et suffisante Vak > 0
courant de gchette (de G vers K) suffisant Ig > Ig (max) catalogue
* la notation Ig (max) indique la valeur maximale du courant (continu) de
gchette ncessaire l'amorage de tous les thyristors d'une mme
rfrence. Ig (max) est donc la valeur minimale prendre en compte pour
le dimensionnement de la rsistance de gchette
courant principal Iak suprieur au courant d'accrochage Il (latching
current): Iak > Il
* dans le cas o le thyristor pilote une charge fortement inductive, le courant
principal s'tablit lentement, le courant de gchette doit tre maintenu
pendant un temps suffisant (impulsion longue)
2.4-condition de blocage :
Courant principal infrieur au courant de maintien Iak < Ih (holding
current), pendant un temps suprieur au temps de dsamorage tq.
*lorsque le thyristor fonctionne en courant redress (cas du pont mixte ou du
pont complet), son blocage est naturel ( chaque priode). Dans le cas d'un
fonctionnement en courant continu (hacheur), il faut recourir des dispositifs de
blocage (blocage forc).
MAINTENANCE INDUSTRIELLE
40
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
2.5- Protection contre les di/dt :
Au dbut de l'amorage du thyristor, seule une petite partie de la jonction est
conductrice. Si la vitesse de croissance du courant principal est trop importante,
elle peut entraner des densits de courant normes qui vont dtruire le
composant. Pour limiter ce phnomne, on utilise des petites inductances en
srie avec le thyristor.
2.6-Protection contre les dv/dt :
Si la tension anode-cathode augmente trop rapidement, elle peut entraner
un amorage intempestif du thyristor (sans signal de gchette). Pour neutraliser
ce phnomne, on utilise le circuit suivant:
Lorsqu'un front raide se prsente entre les points A et B, le condensateur
se charge travers D et l'impdance de la ligne. La tension Vak volue plus
lentement (comme aux bornes du condensateur). La rsistance R intervient lors
de l'amorage command et limite le courant de dcharge du condensateur dans
le thyristor (di/dt). Ce circuit prsente aussi l'avantage d'un amorage plus
facile du thyristor, la dcharge du condensateur permettant un tablissement
plus rapide du courant d'accrochage Il.
MAINTENANCE INDUSTRIELLE
41
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
2.7-Protection contre les courts-circuits :
On utilise des fusibles ultra rapides UR (protistors) choisis en fonction de
leur contrainte thermique It (A.s): It fusible < It thyristor.
2.8-Spcifications techniques :
Exemple du thyristor rapide DK2416F (Thomson) 260 Aeff
3-Transistor :
Le composant le plus important de toute l'histoire de l'lectronique est
vraisemblablement le transistor bipolaire qui est constitu de la succession de
deux jonctions P-N en opposition. On remarque immdiatement qu'il sera alors
possible d'avoir deux configurations diffrentes P-N-P et N-P-N dont les
proprits seront semblables et complmentaires la fois. Les proprits
lectriques de ces structures ne prsentent un intrt que parce que la couche
centrale appele pour des raisons historiques base possde une paisseur trs
faible (< 1 m et parfois beaucoup moins) et un dopage modr dont il rsulte
une longueur de diffusion des porteurs sensiblement suprieure son paisseur.
Fig 20. reprsentation symbolique des deux types de transistors bipolaires
MAINTENANCE INDUSTRIELLE
42
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Chacune des trois zones du transistor est accessible de l'extrieur. Le courant
principal circule entre l'metteur et le collecteur selon le sens de la flche, tandis
que l'lectrode de base permet la commande du courant principal via un courant
beaucoup plus faible (dun facteur 40 plus de 200).
3.1-Caractristiques statiques :
Les courants et tensions du transistor sont lis par les quations dites d'Ebers
et Moll selon le schma quivalent propos par ces deux chercheurs en 1954, et
bien sr par les lois de Kirchhoff IB = IE - IC et VCE = VBE - VBC ce qui
correspond 6 variables dont 2 sont indpendantes et l'on a pris l'habitude de
reprsenter graphiquement leur relations par le biais d'un diagramme quatre
quadrants permettant de visualiser d'un seul coup toutes les interactions entre ces
grandeurs.
Figure 21 : la caractristique du transistor bipolaire.
3.2-Observations :
La fonction Ic = f (Vce) est matrise par la valeur du courant de base.
Celle-ci comporte essentiellement deux domaines ; la partie o Ic est peu
variable pour une valeur de Ib c'est le rgime linaire, la partie coude o
le transistor est en rgime satur.
La fonction Vbe = f (Ib) est celle d'une jonction PN entre la base et
l'metteur.
La fonction Ic = f (Ib) caractrise " l'effet transistor " en rgime linaire.
C'est une droite de pente (ordre de grandeur de 100)
MAINTENANCE INDUSTRIELLE
43
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
En rgime linaire Ic .Ib et en rgime satur Ic < .Ib
En rgime satur Vce < 1Volt
Au point M0 le transistor est bloqu. Entre son collecteur et son metteur
le transistor est quivalent un interrupteur ouvert.
Au point M1 le transistor est satur. Entre son collecteur et son metteur
le transistor est quivalent un interrupteur ferm.
Par la variation spontane du courant Ib de 0 Ib4 ou inversement on peut
passer de M0 M1 ou inversement . Dans ce type de fonctionnement tout
ou rien on dit que le transistor fonctionne en commutation.
En faisant varier Ib tout en conservant le transistor en rgime linaire on
peut utiliser le transistor en amplificateur de courant.
4-Transistor bipolaire grille isole :
Figure 22 : Symbole usuel de lIGBT
Le transistor bipolaire grille isole (IGBT, de langlais Insulated Gate
Bipolar Transistor) est un dispositif semi-conducteur de la famille des
transistors qui est utilis comme interrupteur lectronique de puissance,
principalement dans les montages de llectronique de puissance.
Ce composant, qui combine les avantages des technologies prcdentes
cest--dire la grande simplicit de commande du transistor effet de champ
par rapport au transistor bipolaire, tout en conservant les faibles pertes par
conduction de ce dernier a permis de nombreux progrs dans les
applications de llectronique de puissance, aussi bien en ce qui concerne la
fiabilit que sur laspect conomique.
Les transistors IGBT ont permis denvisager des dveloppements
jusqualors non viables en particulier dans la vitesse variable ainsi que dans
les applications des machines lectriques et des convertisseurs de puissance
qui nous accompagnent chaque jour et partout, sans que nous en soyons
particulirement conscients : automobiles, trains, mtros, bus, avions,
bateaux, ascenseurs, lectromnager, tlvision, domotique, etc.
MAINTENANCE INDUSTRIELLE
44
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
4.1-Caractristiques :
Figure 23 : Schma quivalent de lIGBT
LIGBT est un transistor hybride, regroupant un transistor effet de
champ du type MOSFET en entre et un transistor bipolaire en sortie. Il est
ainsi command par la tension de grille (entre grille et metteur) qui lui est
applique, mais ses caractristiques de conduction (entre collecteur et
metteur) sont celles dun bipolaire. Le schma quivalent du transistor
IGBT ci-contre montre un troisime transistor, qui reprsente en fait une
proprit parasite responsable du latching.
Cette structure lui donne le faible cot nergtique de commande dun
MOSFET, avec les pertes de conduction plus faibles ( surface de puce
donne) dun bipolaire. De plus, les IGBT peuvent grer une tension bien
plus leve que celle gre par les MOSFET.
4.2-structure :
Figure 24 : Vue en coupe dune cellule lmentaire (planar, PT)
La structure dun IGBT est base sur celle dun MOSFET vertical
doublement diffus : lpaisseur du support est utilise pour sparer le drain
de la source. Les paisseurs typiques des wafers sont de l'ordre de 70
100m. Une zone dite d'pitaxie, dope N-, permet l'apparition d'un canal
lorsque des lectrons sont injects par la grille (VG>0, tat passant).
MAINTENANCE INDUSTRIELLE
45
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
La technique de double diffusion est utilise pour crer les puits dops
P/P+ proximit de la source. La prsence d'une rgion dope P+ diminue le
risque de latchup, tout en augmentant la tension de seuil de commutation.
La diffrence principale entre un MOSFET vertical et un IGBT est
lexistence dune couche de substrat P+ (fortement dope) ct
drain/collecteur. Cette couche injecte des trous dans la couche N-, ce qui a
pour effet de diminuer la chute de tension ltat passant et de le transformer
en transistor bipolaire.
5-Triac :
Fonctionnellement un triac est quivalent deux thyristors monts ttebche mais raliss en un seul composant intgr. Cette intgration se traduit par
une dtrioration des performances impliquant de l'employer avec de faibles
dv/dt et des frquences elles aussi trs faibles, typiquement en 50Hz presque
exclusivement.
Figure 25 : triac
Figure 26 : La caractristique du triac.
MAINTENANCE INDUSTRIELLE
46
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
I. PRSENTATION
1-OBJECTIF :
Lobjectif de ce chapitre est dexpliquer les phnomnes particuliers
observs dans les installations BT lors de surcharge ou de dfaut lectrique dans
les circuits quips de variateurs de vitesse. Diffrentes prconisations sont
fournies pour assurer la protection des personnes et des biens, ainsi que la
meilleure continuit de service.
MAINTENANCE INDUSTRIELLE
47
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Lobjectif des variateurs de vitesse de type convertisseurs de frquence
est dalimenter les moteurs asynchrones triphass de manire obtenir des
caractristiques de fonctionnement radicalement diffrentes de leur utilisation
normale (moteurs aliments en direct par la tension rseau), amplitude et
frquence constantes. Le tableau suivant prsente les avantages de ces
dispositifs.
2-NCESSIT DE PROTECTIONS ADAPTES :
Les caractristiques du circuit de puissance (courant, tension.) montrent
la ncessit de prvoir des protections adaptes pour bien exploiter un tel
appareillage. La ralisation des variateurs avec une technologie lectronique
permet lintgration de plusieurs de ces protections au moindre cot.
Ces protections ne remplacent videmment pas celles qui sont ncessaires
au dpart de chaque circuit, selon les rglements dinstallation en vigueur, et qui
sont donc Extrieures aux variateurs. Le fonctionnement de toutes les
protections mises en oeuvre est dcrit dans les chapitres suivants.
MAINTENANCE INDUSTRIELLE
48
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
II. PROTECTIONS CONTRE LES SURINTENSITS
Les protections usuelles contre les surintensits (disjoncteurs ou fusibles)
sont principalement prvues pour intervenir dans deux cas :
Afin de protger une installation contre tout risque de court-circuit.
Afin dviter les risques dus la surcharge dun circuit ou un
courant dexploitation dpassant les capacits des conducteurs (jeux
de barres et cbles) et des appareils de commande et de protection.
La technologie des variateurs de vitesse permet dassurer
lectroniquement certaines de ces fonctions.
1. Protections intgres aux variateurs :
1.1-Protection de surcharge moteur :
Les variateurs modernes assurent la protection du moteur contre les
surcharges
par une limitation instantane du courant efficace 1,5
fois le courant nominal environ,
par un calcul permanent du I2t, avec prise en compte de la
vitesse (la plupart des moteurs tant auto-ventils, le
refroidissement est moins efficace basse vitesse).
A noter que lorsquun dpart nalimente quun moteur et son variateur,
cette protection de surcharge du moteur assure simultanment la protection
de surcharge de lensemble appareillage et cblage.
1.2-Protection contre les courts-circuits moteurs ou ligne en aval du
variateur
En cas de court-circuit entre phases en sortie de variateur (aux bornes du
moteur ou un endroit quelconque de la ligne entre le variateur et le moteur),
la surintensit est dtecte au sein du variateur et un ordre de blocage est
envoy trs rapidement aux IGBT. Le courant de court-circuit (cf. fig. 27) est
interrompu en quelques microsecondes, ce qui assure la protection du
variateur. Ce courant trs bref est essentiellement fourni par le condensateur
de filtrage associ au redresseur, et est donc indiscernable dans la ligne
dalimentation.
Figure 27 : Courtcircuit en aval du
variateur.
MAINTENANCE INDUSTRIELLE
49
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
1.3-Autres protections intgres aux variateurs
Les variateurs disposent dautres fonctions dautoprotection contre :
les surchauffes de leurs composants lectroniques pouvant
entraner leur destruction. Un capteur plac sur le
dissipateur thermique provoque larrt du variateur,
lorsque la temprature dpasse un certain seuil.
les creux de tension du rseau : cette protection est
ncessaire pour viter tout dysfonctionnement des circuits
de contrle et du moteur, ainsi que toute surintensit
dangereuse lorsque la tension rseau reprend sa valeur
normale.
les surtensions frquence industrielle du rseau : il sagit
dviter les destructions ventuelles de leurs composants.
la coupure dune phase (pour les variateurs triphass) : car
lalimentation en monophas qui se substitue
lalimentation en triphas provoque une augmentation du
courant absorb.
1.4-Action des protections intgres
Elles provoquent toutes, en cas de dfaut, le verrouillage du
variateur et larrt du moteur en roue libre . La coupure de
lalimentation est alors assure par le contacteur de ligne dont
louverture est commande par un relais intgr au variateur.
2. Protections extrieures aux variateurs :
En plus des ncessits exposes dans les premires lignes du chapitre, ces
protections contre les surintensits sont aussi prvues pour intervenir en cas
de dfaut interne au variateur (destruction du pont redresseur par exemple) :
le dispositif de protection de la ligne assure la coupure du courant de dfaut
Nota : Bien que ce dispositif ne puisse pas normalement protger les
composants du variateur, son ouverture automatique limite les consquences de
tels dfauts.
MAINTENANCE INDUSTRIELLE
50
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
2.1Emplacements des dispositifs :
Toutes ces protections sont dfinies pour un circuit qui le plus
frquemment se prsente selon la figure 28 :
Figure 28 : Schma prconis pour la
protection contre les surintensits.
Ces associations (disjoncteur, contacteur et variateur) proposes par les
constructeurs sont dnommes dparts-moteurs . Du fait des
protections intgres aux variateurs, ces associations assurent
naturellement une coordination de type 2 dans le cas de court-circuit en
aval du variateur.
Coordination de type 2 signifie quen cas de court-circuit
aucun dommage ni drglage nest admis,
lisolement doit tre conserv,
le dpart-moteur doit tre en mesure de fonctionner aprs
suppression du court-circuit,
le risque de soudure des contacts du contacteur est admis si
ceux-ci peuvent tre facilement spars
Sil y a risque de court-circuit en amont du variateur, pour assurer la
coordination de type 2, il est ncessaire de se reporter aux tables de coordination
fournies par les constructeurs des protections places en amont.
Nota : Avec un variateur, il ny a pas de pointe de courant la mise sous
tension, donc aucune contrainte particulire nest applique au dispositif de
protection.
Deux cas particuliers :
MAINTENANCE INDUSTRIELLE
51
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
o Alimentation de moteurs en parallle Dans ce cas, la protection
de surcharge intgre au variateur ne peut pas assurer la
protection de chaque moteur. En effet, lun des moteurs peut se
trouver en surcharge, alors que le courant absorb par
lensemble des moteurs ne dpasse pas le courant nominal du
variateur. Les moteurs doivent donc tre protgs
individuellement par un relais thermique (cf. fig. 29).
o Il est malgr tout recommand de maintenir la protection de
surcharge intgre au variateur active, afin dassurer la
protection des cbles en amont.
Fig. 29 : protection de surcharge de plusieurs moteurs
aliments par un mme variateur.
o Protection de surcharge intgre au variateur inhibe
Pour certaines applications exigeant une continuit dexploitation imprative, la
protection de surcharge du variateur peut tre inhibe.
La protection des cbles et de lappareillage, qui doit tre assure en amont,
ncessite alors une protection de surcharge obligatoirement associe au
disjoncteur du dpart-moteur (cf. fig30).
Un surdimensionnement de 20 % du cble et de lappareillage est alors
prconis.
MAINTENANCE INDUSTRIELLE
52
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Fig.30 : protection de surcharge intgre au variateur
Inhibe.
III-Protection des personnes :
1-Les risques lis aux dfauts disolement:
Un dfaut disolement, quelle que soit sa cause, prsente des risques pour :
la scurit des personnes (risque de choc lectrique),
la scurit des biens (risque dincendie ou dexplosion en raison dun
chauffement excessif ponctuel),
la disponibilit de lnergie lectrique (dconnexion dune partie dune
installation pour liminer le dfaut).
Concernant la protection des personnes, les normes et rglements distinguent
deux types de contacts dangereux et prcisent les mesures de protection
correspondantes.
1.1- Le contact direct :
Contact de personnes avec des conducteurs actifs (phase ou neutre) ou des
pices conductrices habituellement sous tension (cf. fig.31).
La protection contre ce risque est normalement assure par lisolation des
parties actives au moyen de barrires, crans ou enveloppes (selon CEI 60364-441 ou NF C 15-100). Ces dispositifs ont un caractre prventif et peuvent se
rvler dfaillants. Pour pallier ce risque, on utilise une mesure de protection
complmentaire coupure automatique, consistant dtecter tout courant de
fuite la terre susceptible de circuler au travers dune personne, et qui ne se
reboucle pas la source au travers des conducteurs actifs. Son seuil de
dclenchement est fix 30 mA en courant alternatif (CEI 60364-4-41 ou NF C
15-100) et 60 mA en courant continu.
MAINTENANCE INDUSTRIELLE
53
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Fig.31 : contact direct.
1.2- Le contact indirect :
Contact de personnes avec des masses conductrices, normalement hors
potentiel, mises accidentellement sous tension. Cette mise sous tension rsulte
de la dfaillance de lisolation dun appareil ou dun conducteur amenant un
dfaut disolement (cf. fig.32).
Ce risque lectrique est fonction de la tension de contact qui se dveloppe
entre la masse de lquipement en dfaut et la terre ou dautres masses
conductrices situes proximit.
Pour dfinir les protections mettre en oeuvre, les normes prsentent
diffrents schmas dinstallation selon les liaisons lectriques entre les
conducteurs actifs, les masses et la terre.
Fig. 32 : contact indirect.
MAINTENANCE INDUSTRIELLE
54
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Cahier technique dexploitation du variateur de vitesse Altivar 38 ED
MAINTENANCE INDUSTRIELLE
55
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
L'Altivar 38ED doit tre considr comme un composant, ce
n'est ni une machine ni un appareil prt l'utilisation selon les
directives europennes (directive machine et directive
compatibilit lectromagntique). Il est de la responsabilit du
client final de garantir la conformit de sa machine ces
normes.
L'installation et la mise en uvre de ce variateur doivent tre effectues
conformment aux normes internationales et aux normes nationales de son lieu
d'utilisation. Cette mise en conformit est de la responsabilit de l'intgrateur qui
doit respecter entre autres, pour la communaut europenne, la directive CEM.
Le respect des exigences essentielles de la directive CEM est conditionn
notamment par l'application des prescriptions contenues dans ce document.
1. Recommandations prliminaires
Rception :
MAINTENANCE INDUSTRIELLE
56
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Sassurer que la rfrence du variateur inscrite sur ltiquette est conforme au
bordereau de livraison correspondant au bon de commande. Ouvrir lemballage,
et vrifier que lAltivar 38ED na pas t endommag pendant le transport.
Manutention et stockage :
Pour assurer la protection du variateur avant son installation, manutentionner et
stocker lappareil dans son emballage.
Manutention linstallation :
La manutention ncessite l'utilisation d'un palan; cet effet les variateurs sont
munis "d'oreilles de manutention. Respecter les prcautions dcrites cidessous :
2. Choix du variateur
Pour choisir un variateur de vitesse pour une installation lectrique on
peut se baser sur le tableau donnant les caractristiques techniques du variateur
selon le domaine demploi c'est--dire le moteur utilis.
MAINTENANCE INDUSTRIELLE
57
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
3 .Couple disponible
Applications couple variable :
1- Moteur autoventil : couple utile permanent
2- Moteur motoventil : couple utile permanent
3- Surcouple transitoire, pendant 60 secondes maxi.
4- Couple en survitesse puissance constante
Le surcouple disponible sera de 110% du couple nominal moteur pendant 60
secondes.
Rgime permanent : Pour les moteurs autoventils, le refroidissement du moteur
est li sa vitesse. Il en rsulte un dclassement pour les vitesses infrieures la
moiti de la vitesse nominale.
MAINTENANCE INDUSTRIELLE
58
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Fonctionnement en survitesse : La tension ne pouvant plus voluer avec la
frquence, il en rsulte une diminution de l'induction dans le moteur qui se
traduit par une rduction de couple. S'assurer auprs du constructeur que le
moteur peut fonctionner en survitesse.
Nota :
Avec un moteur spcial, la frquence nominale et la frquence maximale sont
rglables de 10 500 Hz, au moyen du terminal d'exploitation ou des outils
Power Suite.
4. Caractristiques technique :
Environnement :
MAINTENANCE INDUSTRIELLE
59
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Caractristiques lectriques
5. Prsentation, gnralits :
MAINTENANCE INDUSTRIELLE
60
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
1 - Dispositif d'ouverture triangle. L'ouverture n'est autorise que si
l'interrupteur 2 est en position OFF.
2 - Trappe d'accs au terminal d'exploitation.
MAINTENANCE INDUSTRIELLE
61
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
3 - Poigne de commande de l'interrupteur. Ne pas mettre en position ON tant
que la porte est ouverte.
4 - Platine comportant :
Un commutateur 3 positions : Arrt et 2 sens de marche. Le variateur est
livr avec 1 seul sens de marche cbl.
Un potentiomtre de consigne de vitesse.
Des emplacements disponibles pour adjonction ventuelle d'units de
commande ou de signalisation.
5 - Plaque d'obturation de l'ouverture destine recevoir un passe cble
optionnel pour cbles surmouls des bus de communication (voir catalogue).
6 - Plaque passe cble, percer par l'utilisateur, et quiper de presse-toupe
adquats.
6. Prcautions de cblage
Puissance :
Respecter les sections des cbles prconiss par les normes. Le variateur doit
tre imprativement raccord la terre, afin d'tre en conformit avec les
rglementations portant sur les courants de fuite levs (suprieurs 3,5 mA).
Une protection amont par disjoncteur diffrentiel est dconseille en raison des
composantes continues pouvant tre gnres par les courants de fuite. Si
l'installation comporte plusieurs variateurs sur la mme ligne, raccorder
sparment chaque variateur la terre.
Sparer les cbles de puissance des circuits signaux bas niveau de
l'installation (dtecteurs, automates programmables, appareils de mesure, vido,
tlphone).
Commande :
Sparer les circuits de commande et les cbles de puissance. Pour les circuits de
commande et de consigne de vitesse, il est recommand d'utiliser du cble
blind et torsad au pas compris entre 25 et 50 mm en reliant le blindage la
masse chaque extrmit.
7. Prcautions d'utilisation
En commande de puissance par contacteur de
ligne
:
- viter de manuvrer frquemment le contacteur KM1 (vieillissement
prmatur des condensateurs de filtrage), utiliser les entres LI1 LI4 pour
commander le variateur.
- en cas de cycles < 60 s, ces dispositions sont impratives.
MAINTENANCE INDUSTRIELLE
62
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Si des normes de scurit imposent l'isolement du moteur, prvoir un contacteur
en sortie du variateur et utiliser la fonction "commande contacteur aval"
(consulter le guide de programmation).
7. Relais de dfaut, dverrouillage
Le relais de dfaut est excit lorsque le variateur est sous tension et qu'il n'est
pas en dfaut. Il comporte un contact OF point commun.
Le dverrouillage du variateur aprs un dfaut s'effectue :
- par mise hors tension jusqu' extinction de l'affichage et des voyants puis
remise sous tension du variateur,
- automatiquement ou command distance par entre logique : consulter le
guide de programmation.
7. Utilisation
Il est cbl et configur pour redmarrer automatiquement aprs disparition d'un
dfaut d'arrt ventuel, par exemple lors de la coupure puis du rtablissement du
rseau d'alimentation. S'assurer que ce fonctionnement est compatible avec les
conditions de scurit de l'application. Dans le cas contraire, il faut modifier le
cblage et la configuration.
8. Maintenance :
Prcaution :
Avant toute intervention dans le variateur, couper l'alimentation et attendre la
dcharge des condensateurs (environ 3 minutes).
Entretien :
L'Altivar 38ED ne ncessite pas d'entretien prventif. Il est nanmoins conseill
intervalles rguliers de :
- vrifier l'tat et le serrage des connexions,
- s'assurer que la temprature au voisinage de l'appareil reste un niveau
acceptable, et que la ventilation est efficace (dure de vie moyenne des
ventilateurs : 3 5 ans selon les conditions d'exploitation),
- dpoussirer le variateur si ncessaire.
MAINTENANCE INDUSTRIELLE
63
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Entranement vitesse variable (groupe Schneider)
Technologie dlectrotechnique, tome 2, (collection A.CAPLIER)
Cours delectrotechnique, tome 1(Jean-Louis Dalmasso)
Cours dlectrotechnique, tome 2(Jean-Louis Dalmasso)
Electrotechnique lusage dingnieurs .Tome 2 machines lectriques
courants alternatifs (A.Fouill)
www.google.com
www.courselec.free.frhttp://
http://www.shneiderformation.com
MAINTENANCE INDUSTRIELLE
64
Hamid Elachbour /Essebbar Abdeljalil
ESTF
PROJET DE FIN DETUDES
Le choix dun variateur de vitesse tant intimement li la nature de la
charge entrane et aux performances vises, toute dfinition et recherche dun
variateur de vitesse doit passer par une analyse des exigences fonctionnelles de
lquipement puis des performances requises pour le moteur lui-mme. La
documentation des fournisseurs de variateurs de vitesse fait galement
abondamment mention de couple constant, couple variable, puissance constante,
contrle vectoriel de flux, variateur rversible Ces dsignations caractrisent
toutes les donnes ncessaires pour retenir le type de variateur le plus adapt.
Un choix incorrect de variateur peut conduire un fonctionnement
dcevant. De mme, il faut tenir compte de la gamme de vitesse souhaite pour
choisir convenablement lassociation moteur / variateur.
Toutes les informations runies dans ce Cahier Technique doivent
permettre daboutir un bon choix en consultant la documentation de
constructeurs ou, ce qui est encore plus sr, en sadressant, avec toutes les
prcisions ncessaires, des spcialistes pour slectionner le variateur apportant
le meilleur rapport prix / performances.
MAINTENANCE INDUSTRIELLE
65
Hamid Elachbour /Essebbar Abdeljalil
Das könnte Ihnen auch gefallen
- Machines A Courant Continu - ConstructionDokument16 SeitenMachines A Courant Continu - ConstructionMouhsineAtb100% (3)
- Moteur Asynchrone TriphaséDokument61 SeitenMoteur Asynchrone TriphaséJulesNoch keine Bewertungen
- Machine Asynchrone PDFDokument42 SeitenMachine Asynchrone PDFDODOHICHAMNoch keine Bewertungen
- Rapport de Stage Ouvrier1Dokument23 SeitenRapport de Stage Ouvrier1Abbes AliNoch keine Bewertungen
- Notice de Montage Du Kit de Motorisation LimaDokument13 SeitenNotice de Montage Du Kit de Motorisation LimareeNoch keine Bewertungen
- Partie ThéoriqueDokument8 SeitenPartie ThéoriquewissemNoch keine Bewertungen
- Chapitre OneDokument20 SeitenChapitre Onemehdioui billalNoch keine Bewertungen
- MoteurDokument12 SeitenMoteursalahzhrNoch keine Bewertungen
- Aguessy 1Dokument18 SeitenAguessy 1dfeNoch keine Bewertungen
- Rapport de Stage Coulibaly HamedDokument12 SeitenRapport de Stage Coulibaly HamedCoulibaly MhdNoch keine Bewertungen
- Compte Rendu Mas MCC MsDokument24 SeitenCompte Rendu Mas MCC MsAbderrazzak TaNoch keine Bewertungen
- TP Propulsion Et Moteurs AvionsDokument5 SeitenTP Propulsion Et Moteurs AvionsCEDRIC NACEL LACMAGO TSOPKEINGNoch keine Bewertungen
- SII Fraise MèreDokument12 SeitenSII Fraise MèreJules WillardNoch keine Bewertungen
- Banc D'essaiDokument25 SeitenBanc D'essaiaysonsanonymosNoch keine Bewertungen
- Moteur A Cage D EcureuilDokument5 SeitenMoteur A Cage D EcureuilAziz RahilNoch keine Bewertungen
- Sujet 2Dokument8 SeitenSujet 2rokedNoch keine Bewertungen
- Moteur AsynchroneDokument14 SeitenMoteur AsynchroneAsma usmaNoch keine Bewertungen
- Moteur AsynchroneDokument14 SeitenMoteur AsynchroneAsma usmaNoch keine Bewertungen
- Rapport ElectroDokument25 SeitenRapport ElectroHoucem B HsnNoch keine Bewertungen
- MCI Bielle ManivelleDokument10 SeitenMCI Bielle ManivelleAsma usmaNoch keine Bewertungen
- Memoire de Master de Yablehi AlexandreDokument20 SeitenMemoire de Master de Yablehi Alexandrealexandre yablehiNoch keine Bewertungen
- Brochure N 2 TP MciDokument4 SeitenBrochure N 2 TP MciAli DjallelNoch keine Bewertungen
- Rap 510 PDFDokument62 SeitenRap 510 PDFMed Kebir Hrm100% (1)
- Document 8Dokument11 SeitenDocument 8Ihssan KHNoch keine Bewertungen
- Rapport de StageDokument22 SeitenRapport de Stagetounsiabdellah47Noch keine Bewertungen
- Saouli YoucefDokument34 SeitenSaouli YoucefMahdi BensalemNoch keine Bewertungen
- Rapport de StageDokument22 SeitenRapport de Stagetemi 101Noch keine Bewertungen
- Présentation de SotonosDokument3 SeitenPrésentation de SotonosJIIK. FFNoch keine Bewertungen
- Motoculteurs v2Dokument9 SeitenMotoculteurs v2NEBNoch keine Bewertungen
- TP MachineDokument13 SeitenTP Machinefadig4mez96Noch keine Bewertungen
- Cours Exemple de Cahier Des Charges FonctionnelDokument6 SeitenCours Exemple de Cahier Des Charges FonctionnelAlaealeaNoch keine Bewertungen
- Principe Moteur Brushless: Réaliser ParDokument17 SeitenPrincipe Moteur Brushless: Réaliser ParAhmed BouafifNoch keine Bewertungen
- Boite Auto CVT NissanDokument7 SeitenBoite Auto CVT Nissannord reprogNoch keine Bewertungen
- VecttorDokument23 SeitenVecttorkaoutharNoch keine Bewertungen
- Modification HEQ5Dokument14 SeitenModification HEQ5Lionel CharvinNoch keine Bewertungen
- CHERGUIII3Dokument12 SeitenCHERGUIII3Masouda NaboulaNoch keine Bewertungen
- AzerarakTassadit HarekLouizaDokument99 SeitenAzerarakTassadit HarekLouizakima lachgarNoch keine Bewertungen
- M 203 Transmission AutomobileDokument29 SeitenM 203 Transmission AutomobileAbdo AbdoNoch keine Bewertungen
- Moteur MonophaséDokument10 SeitenMoteur MonophaséAbdelmoumenAbdelmoumen100% (1)
- 03 MAS EleveDokument6 Seiten03 MAS ElevehatelNoch keine Bewertungen
- Cours de Machines Electrique ELEQ 4 PDFDokument52 SeitenCours de Machines Electrique ELEQ 4 PDFCyrille Heubia100% (5)
- Me KahliaDokument69 SeitenMe Kahliailyasse samiriNoch keine Bewertungen
- Machines Asynchrones - Choix Et Problèmes ConnexesDokument27 SeitenMachines Asynchrones - Choix Et Problèmes ConnexesMouhsineAtb50% (2)
- NadirDokument28 SeitenNadirbenke manouNoch keine Bewertungen
- Mémoire Badri 2016 Fin0Dokument65 SeitenMémoire Badri 2016 Fin0PFENoch keine Bewertungen
- Dossier Technique Essuie-Glace Bosch de Mercedes PDFDokument6 SeitenDossier Technique Essuie-Glace Bosch de Mercedes PDFKhalil FrikhaNoch keine Bewertungen
- Les EngrenagesDokument11 SeitenLes EngrenagesAbd El Basset ünkutNoch keine Bewertungen
- Moteur A Cage D EcureuilDokument6 SeitenMoteur A Cage D EcureuilAbderezak KedDouNoch keine Bewertungen
- Cours Partie1Dokument12 SeitenCours Partie1Lamia OUAHROUCHENoch keine Bewertungen
- Étude, Recherche, Diagnostic Et Mise Au Point Dun Système de Freinage Classique Avec Évolution ABS, ASR Et ESPDokument32 SeitenÉtude, Recherche, Diagnostic Et Mise Au Point Dun Système de Freinage Classique Avec Évolution ABS, ASR Et ESPSoufiane Hazel100% (7)
- MCI32 TI Technologie Des Moteurs 36Dokument36 SeitenMCI32 TI Technologie Des Moteurs 36Hamza Salloum0% (1)
- 5chapitre 2Dokument8 Seiten5chapitre 2Mohamed Yacine RachediNoch keine Bewertungen
- Lakehal-Memoire-L3B (2)Dokument41 SeitenLakehal-Memoire-L3B (2)Sihem MérNoch keine Bewertungen
- Moteurs Pas À Pas - Dossier Complet - Techniques de L'ingénieurDokument2 SeitenMoteurs Pas À Pas - Dossier Complet - Techniques de L'ingénieurLahouari FatahNoch keine Bewertungen
- A Completer PfaDokument32 SeitenA Completer PfaMohamed AgrebiNoch keine Bewertungen
- SSP 514 La Nouvelle Gamme de Moteurs Diesel EA288Dokument76 SeitenSSP 514 La Nouvelle Gamme de Moteurs Diesel EA288OualidNoch keine Bewertungen
- Machines À Courant Continu - 2Dokument16 SeitenMachines À Courant Continu - 2LyesNoch keine Bewertungen
- Technologie automobile: Les Grands Articles d'UniversalisVon EverandTechnologie automobile: Les Grands Articles d'UniversalisNoch keine Bewertungen
- Cours - MATH - SF HDokument62 SeitenCours - MATH - SF Homarkhan33Noch keine Bewertungen
- Cours Math SeDokument24 SeitenCours Math Seomarkhan33Noch keine Bewertungen
- Les Liaisons EncastrementsDokument24 SeitenLes Liaisons EncastrementsTounsi TwensaNoch keine Bewertungen
- Cours Math SNDokument29 SeitenCours Math SNomarkhan33Noch keine Bewertungen
- Cours OSDokument100 SeitenCours OSomarkhan33Noch keine Bewertungen
- Cours Math TLDokument37 SeitenCours Math TLomarkhan33Noch keine Bewertungen
- Chapitre 1Dokument5 SeitenChapitre 1Chakib KaNoch keine Bewertungen
- Exercices Sur La Transformee en Z: Exercice 1Dokument7 SeitenExercices Sur La Transformee en Z: Exercice 1omarkhan33Noch keine Bewertungen
- Cours Math TLDokument37 SeitenCours Math TLomarkhan33Noch keine Bewertungen
- Cours Math SFDokument34 SeitenCours Math SFomarkhan33Noch keine Bewertungen
- Rapport Final PFE PDFDokument129 SeitenRapport Final PFE PDFomarkhan33Noch keine Bewertungen
- Cours - MATH - SF HDokument62 SeitenCours - MATH - SF Homarkhan33Noch keine Bewertungen
- Projet KamalDokument1 SeiteProjet Kamalomarkhan33Noch keine Bewertungen
- Automat Is MeDokument6 SeitenAutomat Is Meomarkhan33Noch keine Bewertungen
- Gamme Corps Hydraulique CorrigeDokument4 SeitenGamme Corps Hydraulique CorrigeMohamed DridiNoch keine Bewertungen
- Séchoir A Lit FluidiséDokument49 SeitenSéchoir A Lit Fluidiséomarkhan33100% (2)
- Les Game D'usinage de PFE by YounessDokument16 SeitenLes Game D'usinage de PFE by Younessomarkhan33Noch keine Bewertungen
- 1 ErordreDokument4 Seiten1 ErordreSaad HamimiNoch keine Bewertungen
- Pfe - Amdec Machine PDFDokument77 SeitenPfe - Amdec Machine PDFomarkhan3378% (88)
- Pfe SALIHDokument70 SeitenPfe SALIHomarkhan33Noch keine Bewertungen
- FiltreDokument6 SeitenFiltreJoel John's DjenontinNoch keine Bewertungen
- SM6 Spec TechFRDokument9 SeitenSM6 Spec TechFRAhmed BoussoffaraNoch keine Bewertungen
- Cours Électronique Analogique 30Dokument51 SeitenCours Électronique Analogique 30Andy ScottNoch keine Bewertungen
- Chapitre 16 DisjoncteursDokument48 SeitenChapitre 16 DisjoncteursnpfhNoch keine Bewertungen
- TP08 OnduleursDokument6 SeitenTP08 OnduleursayoubNoch keine Bewertungen
- Moteur A Courant Continue Final22Dokument12 SeitenMoteur A Courant Continue Final2218188yem3761Noch keine Bewertungen
- M203 Machine A Courant CountinuDokument76 SeitenM203 Machine A Courant Countinuabdelouahed chakraNoch keine Bewertungen
- Axiom Audio Millenia M2v2/MPv2/M22v2 Owner's ManualDokument8 SeitenAxiom Audio Millenia M2v2/MPv2/M22v2 Owner's Manualshawn174Noch keine Bewertungen
- Na Tipusu Elektromos HajtomuDokument9 SeitenNa Tipusu Elektromos Hajtomummihai_popa2006Noch keine Bewertungen
- BTS 2001 TransfotriDokument9 SeitenBTS 2001 TransfotriPrivilege LeigeNoch keine Bewertungen
- Ci7 TD1Dokument6 SeitenCi7 TD1Toky Fanambinana RanaivoarisoaNoch keine Bewertungen
- Kebconvert f5Dokument356 SeitenKebconvert f5KOFFINoch keine Bewertungen
- Série 3 2020-2021Dokument2 SeitenSérie 3 2020-2021Siwar AbbesNoch keine Bewertungen
- Journal de StageDokument2 SeitenJournal de StageRoua KahlaouiNoch keine Bewertungen
- Appareillage Electrique - SectionneurDokument3 SeitenAppareillage Electrique - SectionneursobemileNoch keine Bewertungen
- Le Champ TournantDokument8 SeitenLe Champ TournantimadNoch keine Bewertungen
- Partie1 1 GeneralitesDokument85 SeitenPartie1 1 GeneralitesOusmane Mamane OusmaneNoch keine Bewertungen
- Chap1 Cours METCC EESA1 22-23Dokument20 SeitenChap1 Cours METCC EESA1 22-23khiri saraNoch keine Bewertungen
- QCM TechnoDokument16 SeitenQCM TechnoRahim TRAORE100% (1)
- B.61-24 Electrotechnique de ReseauDokument68 SeitenB.61-24 Electrotechnique de Reseauteteu8667% (3)
- Chapitre 5 Gs G15-1Dokument25 SeitenChapitre 5 Gs G15-1Emma OdronoNoch keine Bewertungen
- TELYSDokument28 SeitenTELYSAnonymous uEt1sNhU7l90% (10)
- Travaux Diriges Sur Le Redressement Non Commande-1Dokument4 SeitenTravaux Diriges Sur Le Redressement Non Commande-1Arnold Donfack100% (1)
- TP Schemas Et Appareillages ÉlectriquesDokument35 SeitenTP Schemas Et Appareillages ÉlectriquesMahfoudh BouraliaNoch keine Bewertungen
- TPDokument9 SeitenTPAyoub MederbelNoch keine Bewertungen
- Cours3 PDFDokument7 SeitenCours3 PDFabdelfattah hamidoucheNoch keine Bewertungen
- CH2 Multivibrateurs 2014 2015 CP2Dokument15 SeitenCH2 Multivibrateurs 2014 2015 CP2mehdimereNoch keine Bewertungen
- Cours 01Dokument24 SeitenCours 01fay salNoch keine Bewertungen
- Cours Schema ElectriqueDokument49 SeitenCours Schema ElectriqueOncle LinkNoch keine Bewertungen
- Transfert Site de Ooredoo (WTA) À HUAWEI FMDokument19 SeitenTransfert Site de Ooredoo (WTA) À HUAWEI FMAmine MohamedNoch keine Bewertungen