Das könnte Ihnen auch gefallen
- Manual Auto CadDokument43 SeitenManual Auto Cadsmartcad60Noch keine Bewertungen
- Spse01560 PDFDokument309 SeitenSpse01560 PDFdiegomilitojNoch keine Bewertungen
- Tutorial Serie de Fourier Con MatlabDokument8 SeitenTutorial Serie de Fourier Con MatlabPilar BernalNoch keine Bewertungen
- Catalogo de Correias Optibelt 2005Dokument90 SeitenCatalogo de Correias Optibelt 2005Heitor NoratNoch keine Bewertungen
- DireccionDokument1 SeiteDireccionLorena HesterNoch keine Bewertungen
- Libro 2Dokument1 SeiteLibro 2Lorena HesterNoch keine Bewertungen
- 02 Cap02 03 TransformadaDokument59 Seiten02 Cap02 03 TransformadaDavidsiño Andresiño VarelaNoch keine Bewertungen
- Radio de CurvaturaDokument1 SeiteRadio de CurvaturaLorena HesterNoch keine Bewertungen
- Espect RosDokument9 SeitenEspect RosRicardo Toribio DionicioNoch keine Bewertungen
- Ejercicios Resueltos 2011Dokument11 SeitenEjercicios Resueltos 2011Enriarturo RvaNoch keine Bewertungen
- Manual OptibeltDokument160 SeitenManual OptibeltRenzo Jo Laurent100% (2)
- Copia de Prest - CorreoDokument2 SeitenCopia de Prest - CorreoLorena HesterNoch keine Bewertungen
- Libro 2Dokument1 SeiteLibro 2Lorena HesterNoch keine Bewertungen
- Ingles Prog Int2Dokument17 SeitenIngles Prog Int2Lorena HesterNoch keine Bewertungen
- Ingles Prog Int1Dokument14 SeitenIngles Prog Int1Jose Garcia IbañezNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- Copia de Prest - CorreoDokument2 SeitenCopia de Prest - CorreoLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- EjemploDokument1 SeiteEjemploLorena HesterNoch keine Bewertungen
- Antropologia VialDokument13 SeitenAntropologia Vialrenzito85Noch keine Bewertungen
- Mito y Verdades de La Violencia de GeneroDokument25 SeitenMito y Verdades de La Violencia de GeneroDelina BaldNoch keine Bewertungen
- Juegos para pasar el verano en familiaDokument61 SeitenJuegos para pasar el verano en familiaUniformes AdrianaNoch keine Bewertungen
- Hidrologia SatelitalDokument7 SeitenHidrologia SatelitalRobert Jhonatan Chavez MontañezNoch keine Bewertungen
- Lo Fosco PiaDokument9 SeitenLo Fosco PiaArturo TorresNoch keine Bewertungen
- TV - Probabilidad Total y Teorema de Bayes - ESTADISTICA DESCRIPTIVA Y PROBABILIDADES (5316)Dokument6 SeitenTV - Probabilidad Total y Teorema de Bayes - ESTADISTICA DESCRIPTIVA Y PROBABILIDADES (5316)Edwar CastilloNoch keine Bewertungen
- Proyecto Arduino RadarDokument20 SeitenProyecto Arduino Radarmarco antonioNoch keine Bewertungen
- Caso Los GroboDokument4 SeitenCaso Los GroboMiguel De La CruzNoch keine Bewertungen
- Proyecto II para La Captacion y Neutralizacion Del Dioxido de Carbono IIDokument34 SeitenProyecto II para La Captacion y Neutralizacion Del Dioxido de Carbono IIu510936Noch keine Bewertungen
- Spanish Kitty Thelittlewhitekitten by LittlehandcrochetDokument10 SeitenSpanish Kitty Thelittlewhitekitten by LittlehandcrochetNatalia Molina Giraldo100% (6)
- Publicaciones Digital Xli Curso Derecho Internacional 2014 Ana Elizabeth Villalta VizcarraDokument21 SeitenPublicaciones Digital Xli Curso Derecho Internacional 2014 Ana Elizabeth Villalta Vizcarrablest777Noch keine Bewertungen
- FFII-problemas Resueltos Tema 2Dokument25 SeitenFFII-problemas Resueltos Tema 2Pepe loanNoch keine Bewertungen
- BalanceComprobacionNegocioDokument6 SeitenBalanceComprobacionNegocioAndrea SierraNoch keine Bewertungen
- Guia para La Evaluacion de Trabajos PesadosDokument195 SeitenGuia para La Evaluacion de Trabajos PesadosKatherine Fonseca AravenaNoch keine Bewertungen
- Elitismo en MonterreyDokument1 SeiteElitismo en MonterreyGilberto AbelardoNoch keine Bewertungen
- CURSO TALLER DE POSTGRADO 1ra., 2da. y 3ra. ClaseDokument8 SeitenCURSO TALLER DE POSTGRADO 1ra., 2da. y 3ra. ClaseGianluca MamaniNoch keine Bewertungen
- La Opcion Benedictina Red PDFDokument6 SeitenLa Opcion Benedictina Red PDFraymont garciaNoch keine Bewertungen
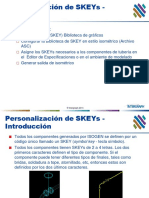
- Simbolos Personalizados y SoportesDokument18 SeitenSimbolos Personalizados y Soporteskakoso74Noch keine Bewertungen
- De Los Siete Pecados Capitales A Los Trastornos de PersonalidadDokument16 SeitenDe Los Siete Pecados Capitales A Los Trastornos de PersonalidadFrancisco Castillo RodriguezNoch keine Bewertungen
- Art 3bbbDokument18 SeitenArt 3bbbwackkofranNoch keine Bewertungen
- Elaboración de cerveza UNJFSCDokument18 SeitenElaboración de cerveza UNJFSCJhonny Ramos VivancoNoch keine Bewertungen
- El Palacio de Los SueñosDokument3 SeitenEl Palacio de Los SueñosSuhail Anais Prato BrizuelaNoch keine Bewertungen
- YesoterapiaDokument11 SeitenYesoterapiaIvanna Elizabeth Barrios83% (6)
- Muy Interesante - España - 04.2021Dokument188 SeitenMuy Interesante - España - 04.2021Sebastián Hks100% (1)
- Estudio Sedimentario Rio AconcaguaDokument80 SeitenEstudio Sedimentario Rio AconcaguaHéctor Eduardo Gallardo GutiérrezNoch keine Bewertungen
- Acoplamientos Oldham ideales para aplicaciones de artes gráficasDokument7 SeitenAcoplamientos Oldham ideales para aplicaciones de artes gráficasLuis DiazNoch keine Bewertungen
- Cantando la alegría de vivirDokument24 SeitenCantando la alegría de vivirVicky HdzNoch keine Bewertungen
- Banco de Preguntas Cepru Oficial Primer Examen 2023 PDFDokument5 SeitenBanco de Preguntas Cepru Oficial Primer Examen 2023 PDFEdgar Cordova OliveraNoch keine Bewertungen
- Lista de Animales Impuros Según La BibliaDokument2 SeitenLista de Animales Impuros Según La BibliaGrupo Conéctate100% (1)
- Recrear La Vida Con Una Ascesis para La VidaDokument8 SeitenRecrear La Vida Con Una Ascesis para La VidaTomasita Gonzalez ArtesaníasNoch keine Bewertungen