Das könnte Ihnen auch gefallen
- Software ArcelorMittal CTICM Columns Calculator A3C Version 2.20Dokument1 SeiteSoftware ArcelorMittal CTICM Columns Calculator A3C Version 2.20bosnia76Noch keine Bewertungen
- MidasGen WindForcesDokument4 SeitenMidasGen WindForcesbosnia76Noch keine Bewertungen
- 2007 SDTSB WallaceDokument18 Seiten2007 SDTSB WallaceChristian Alcedo SantiNoch keine Bewertungen
- STM Ec2Dokument39 SeitenSTM Ec2Vincenzo MondelliNoch keine Bewertungen
- Fundamental PeriodDokument14 SeitenFundamental PeriodsancloudNoch keine Bewertungen
- RC Desktop ToolkitDokument28 SeitenRC Desktop ToolkitVijayNoch keine Bewertungen
- Nelson Stud CatalogDokument110 SeitenNelson Stud CatalogAustin SollockNoch keine Bewertungen
- DesignPTutorial RC BeamDokument16 SeitenDesignPTutorial RC BeamKathirgamanathan SivanathanNoch keine Bewertungen
- Circo L Are DurcDokument572 SeitenCirco L Are Durcbosnia76Noch keine Bewertungen
- Dissertation2008 PhamTuanDokument96 SeitenDissertation2008 PhamTuanbosnia76Noch keine Bewertungen
- DesignPTutorial RC BeamDokument16 SeitenDesignPTutorial RC BeamKathirgamanathan SivanathanNoch keine Bewertungen
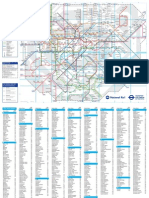
- London Rail and Tube Services MapDokument2 SeitenLondon Rail and Tube Services Mapbosnia76Noch keine Bewertungen
- Gen 2011 v2 1 Release NoteDokument10 SeitenGen 2011 v2 1 Release Notebosnia76Noch keine Bewertungen
- Strut & Tie ModelDokument67 SeitenStrut & Tie Modelahmed adel100% (9)
- London Rail and Tube Services MapDokument2 SeitenLondon Rail and Tube Services Mapbosnia76Noch keine Bewertungen
- JRC Design of Floor100208Dokument75 SeitenJRC Design of Floor100208bosnia76Noch keine Bewertungen
- EOTA TR29 Design of Bonded AnchorsDokument36 SeitenEOTA TR29 Design of Bonded Anchorsl282Noch keine Bewertungen
- CSP00138 (GEN-Tutorial) Pushover Analysis As Per Eurocode 8 2004Dokument24 SeitenCSP00138 (GEN-Tutorial) Pushover Analysis As Per Eurocode 8 2004bosnia76100% (1)
- Contact Element TechniquesDokument41 SeitenContact Element Techniquesbosnia76Noch keine Bewertungen
- Strumas TeoriaDokument13 SeitenStrumas Teoriabosnia76Noch keine Bewertungen
- PCI Parking BuildingDokument125 SeitenPCI Parking BuildingProfessor Dr. Nabeel Al-Bayati-Consultant EngineerNoch keine Bewertungen
- Seismic Orthogonal EffectDokument10 SeitenSeismic Orthogonal Effectbosnia76Noch keine Bewertungen
- Model CheckerDokument2 SeitenModel Checkerbosnia76Noch keine Bewertungen
- Suvs and Parking Structures:: Is There A Weight Problem?Dokument11 SeitenSuvs and Parking Structures:: Is There A Weight Problem?bosnia76Noch keine Bewertungen
- (2008) Numerical Simulation of Wind EffectsDokument26 Seiten(2008) Numerical Simulation of Wind Effectsbosnia76Noch keine Bewertungen
- s4 Ec8-Lisbon M FardisDokument119 Seitens4 Ec8-Lisbon M Fardisbosnia76Noch keine Bewertungen
- VB TutorialDokument64 SeitenVB TutorialArsalan KhanNoch keine Bewertungen
- Seismic Orthogonal EffectDokument10 SeitenSeismic Orthogonal Effectbosnia76Noch keine Bewertungen
- 03 Presentazione Codice Ansys SattaminoDokument156 Seiten03 Presentazione Codice Ansys Sattaminobosnia76Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Life Insurance Exam Questions and Answers PDFDokument13 SeitenLife Insurance Exam Questions and Answers PDFDairo GaniyatNoch keine Bewertungen
- HTTP://WWW - Authorstream.com/presentation/kunalcmehta 1123128 Exim PolicyDokument2 SeitenHTTP://WWW - Authorstream.com/presentation/kunalcmehta 1123128 Exim PolicyPranesh KumarNoch keine Bewertungen
- Speaking Telephone RoleplaysDokument2 SeitenSpeaking Telephone RoleplaysremimiguelNoch keine Bewertungen
- Training and Development Project Report - MessDokument37 SeitenTraining and Development Project Report - MessIqra Bismi100% (1)
- Monopoly - Indian RailwaysDokument35 SeitenMonopoly - Indian Railwaysvrj1091Noch keine Bewertungen
- VVIP Circuit House achieves 5-star GRIHA ratingDokument1 SeiteVVIP Circuit House achieves 5-star GRIHA ratingmallikaNoch keine Bewertungen
- Emmanuel James Oteng, F. Inst. L. Ex. Legal Executive LawyerDokument3 SeitenEmmanuel James Oteng, F. Inst. L. Ex. Legal Executive Lawyeremmanuel otengNoch keine Bewertungen
- Catalog CONSUDokument19 SeitenCatalog CONSUVăn Nam PhạmNoch keine Bewertungen
- Norlys 2016Dokument124 SeitenNorlys 2016elektrospecNoch keine Bewertungen
- Web Based Tour Management for Bamboo ParadiseDokument11 SeitenWeb Based Tour Management for Bamboo Paradisemohammed BiratuNoch keine Bewertungen
- Oracle Weblogic Server 12c Administration II - Activity Guide PDFDokument188 SeitenOracle Weblogic Server 12c Administration II - Activity Guide PDFNestor Torres Pacheco100% (1)
- Tugasan HBMT 4303Dokument20 SeitenTugasan HBMT 4303normahifzanNoch keine Bewertungen
- B JA RON GAWATDokument17 SeitenB JA RON GAWATRon GawatNoch keine Bewertungen
- Green Ecobuses Run On This Route.: BusesDokument6 SeitenGreen Ecobuses Run On This Route.: BusesLuis DíazNoch keine Bewertungen
- Philips Lighting Annual ReportDokument158 SeitenPhilips Lighting Annual ReportOctavian Andrei NanciuNoch keine Bewertungen
- FM Butterfly ValvesDokument3 SeitenFM Butterfly ValvesahsanNoch keine Bewertungen
- JESTEC TemplateDokument11 SeitenJESTEC TemplateMuhammad FakhruddinNoch keine Bewertungen
- CE 462 Construction ManagementDokument100 SeitenCE 462 Construction Managementmonicycle companyNoch keine Bewertungen
- Schoology App Login DirectionsDokument5 SeitenSchoology App Login Directionsapi-234989244Noch keine Bewertungen
- Different Aids For TeachingDokument19 SeitenDifferent Aids For TeachingPrecious CabarseNoch keine Bewertungen
- Motorola l6Dokument54 SeitenMotorola l6Marcelo AriasNoch keine Bewertungen
- Objective Type Questions SAPMDokument15 SeitenObjective Type Questions SAPMSaravananSrvn77% (31)
- Sharp MX2310U Technical Handy ManualDokument64 SeitenSharp MX2310U Technical Handy ManualUserNoch keine Bewertungen
- Data Science Machine LearningDokument15 SeitenData Science Machine LearningmagrinraphaelNoch keine Bewertungen
- Importance and Behavior of Capital Project Benefits Factors in Practice: Early EvidenceDokument13 SeitenImportance and Behavior of Capital Project Benefits Factors in Practice: Early EvidencevimalnandiNoch keine Bewertungen
- Armed Struggle in Africa (1969)Dokument167 SeitenArmed Struggle in Africa (1969)Dr.VolandNoch keine Bewertungen
- Flyaudio in An 08 Is250 With Factory Nav InstructionsDokument2 SeitenFlyaudio in An 08 Is250 With Factory Nav InstructionsAndrewTalfordScottSr.Noch keine Bewertungen
- Banking Software System Monitoring ToolDokument4 SeitenBanking Software System Monitoring ToolSavun D. CheamNoch keine Bewertungen
- Caterpillar Cat 330L EXCAVATOR (Prefix 8FK) Service Repair Manual (8FK00001 and Up)Dokument27 SeitenCaterpillar Cat 330L EXCAVATOR (Prefix 8FK) Service Repair Manual (8FK00001 and Up)kfm8seuuduNoch keine Bewertungen
- Optimization TheoryDokument18 SeitenOptimization TheoryDivine Ada PicarNoch keine Bewertungen