Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- DAA C CodesDokument110 SeitenDAA C CodesArvjeetNoch keine Bewertungen
- Modern Control Engineering Problems CH 8 PDFDokument29 SeitenModern Control Engineering Problems CH 8 PDFjackabrahamNoch keine Bewertungen
- Java LabDokument10 SeitenJava Labshresth modiNoch keine Bewertungen
- Finite Element Method For Structural Dynamic and Stability AnalysesDokument43 SeitenFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNoch keine Bewertungen
- A Machine Learning Research Template For Binary Classification Problems and Shapley Values IntegrationDokument6 SeitenA Machine Learning Research Template For Binary Classification Problems and Shapley Values IntegrationVolraths ValdiviaNoch keine Bewertungen
- 6.867 Machine Learning: Mid-Term Exam October 13, 2004Dokument11 Seiten6.867 Machine Learning: Mid-Term Exam October 13, 2004Dickson SamwelNoch keine Bewertungen
- Cs6711 Security Laboratory Manual 2 PDFDokument66 SeitenCs6711 Security Laboratory Manual 2 PDFrachanapatil123100% (1)
- ANFIS Adaptive Network Based Fuzzy InferenceDokument4 SeitenANFIS Adaptive Network Based Fuzzy InferenceBramwell Samuel KumarNoch keine Bewertungen
- Study Material On DiscriminantAnalysisDokument24 SeitenStudy Material On DiscriminantAnalysisanupam99276Noch keine Bewertungen
- Faculty ListDokument4 SeitenFaculty ListtiinkuNoch keine Bewertungen
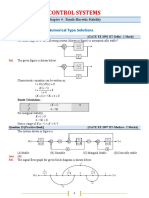
- Control Systems: GATE Objective & Numerical Type SolutionsDokument14 SeitenControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNoch keine Bewertungen
- Cs 6402 Design and Analysis of AlgorithmsDokument112 SeitenCs 6402 Design and Analysis of Algorithmsvidhya_bineeshNoch keine Bewertungen
- QM I - 2017Dokument4 SeitenQM I - 2017Naveen KumarNoch keine Bewertungen
- A Common Algorithm For Various ParametriDokument6 SeitenA Common Algorithm For Various ParametriSabapathy KrishnakumarNoch keine Bewertungen
- Analysis of Voice Recognition Algorithms using MATLABDokument6 SeitenAnalysis of Voice Recognition Algorithms using MATLABHouda BOUCHAREBNoch keine Bewertungen
- Cryptography: Meeting 11Dokument11 SeitenCryptography: Meeting 11Epul PublisherNoch keine Bewertungen
- Applications of Mathematics in The WorldDokument1 SeiteApplications of Mathematics in The WorldJohn Luis BantolinoNoch keine Bewertungen
- AbcdDokument11 SeitenAbcdNithin KunchoorNoch keine Bewertungen
- Observation PresentationDokument19 SeitenObservation PresentationFlorame Algarme MelanoNoch keine Bewertungen
- Prediksi Soal (Ii)Dokument17 SeitenPrediksi Soal (Ii)orangterhebat7171Noch keine Bewertungen
- Pert & CPM: ProblemDokument4 SeitenPert & CPM: ProblemHamza MasoodNoch keine Bewertungen
- Recurrence and Master TheoremDokument35 SeitenRecurrence and Master Theoremwseries50% (2)
- PID Control Fundamentals ExplainedDokument56 SeitenPID Control Fundamentals ExplainedSyafRizal100% (1)
- Industrial Mini Project Report ON Alzheimer Disease Detection Using Support Vector Machine AlgorithmDokument10 SeitenIndustrial Mini Project Report ON Alzheimer Disease Detection Using Support Vector Machine AlgorithmRahul RepalaNoch keine Bewertungen
- Decision Science MCQ Prof - Pradip S ThombareDokument56 SeitenDecision Science MCQ Prof - Pradip S ThombareAbhishek A. NadgireNoch keine Bewertungen
- Kamothe, Navi Mumbai - 410 209 (Affiliated To University of Mumbai)Dokument19 SeitenKamothe, Navi Mumbai - 410 209 (Affiliated To University of Mumbai)AK ASHOKNoch keine Bewertungen
- Quantitative Techniques QuestionsDokument2 SeitenQuantitative Techniques Questionsmstfahmed76Noch keine Bewertungen
- Semester III BCA3010 Computer Oriented Numerical MethodsDokument12 SeitenSemester III BCA3010 Computer Oriented Numerical MethodsRaman VenmarathoorNoch keine Bewertungen
- Linear Programming QuizDokument1 SeiteLinear Programming QuizFarhana SabrinNoch keine Bewertungen
- An Introduction To Bootstrap Methods and Their Application: Prof. Dr. Diego Kuonen, Cstat Pstat CsciDokument73 SeitenAn Introduction To Bootstrap Methods and Their Application: Prof. Dr. Diego Kuonen, Cstat Pstat CsciShintaNoch keine Bewertungen