Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- DC Motor Lecture Notes 4Dokument24 SeitenDC Motor Lecture Notes 4Man Ebook100% (1)
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Control Single-Phase IM Speed via Arduino PWMDokument13 SeitenControl Single-Phase IM Speed via Arduino PWMankitha0% (1)
- Battery Charger Circuit Using SCRDokument22 SeitenBattery Charger Circuit Using SCRHiếu Dương100% (1)
- Fund Management User ManuualDokument35 SeitenFund Management User ManuualPradip Shelar100% (3)
- REGULATION TESTING OF SYNCHRONOUS MACHINESDokument10 SeitenREGULATION TESTING OF SYNCHRONOUS MACHINESAbhishEk Singh67% (3)
- SMPS PPT Summer Traning by VijayDokument60 SeitenSMPS PPT Summer Traning by VijayVijay Kaplsya86% (7)
- Daikin ControlDokument175 SeitenDaikin Controlchinitn100% (1)
- CSC162 Manual PDFDokument89 SeitenCSC162 Manual PDFNeelakandan MasilamaniNoch keine Bewertungen
- R.G. Coyle - System Dynamics ModellingDokument426 SeitenR.G. Coyle - System Dynamics ModellingKhalis Mahmudah100% (4)
- Determine synchronous machine impedancesDokument5 SeitenDetermine synchronous machine impedancesarjuna4306Noch keine Bewertungen
- Norsok Standard I-005u3 1Dokument244 SeitenNorsok Standard I-005u3 1mcaamaNoch keine Bewertungen
- TRG Manual For Avr With Maxdna PLC PDFDokument65 SeitenTRG Manual For Avr With Maxdna PLC PDFRukma Goud Shakkari0% (1)
- P & ID Review Check List: Chemical Engineering SiteDokument8 SeitenP & ID Review Check List: Chemical Engineering SiteMAHESH CHANDNoch keine Bewertungen
- Single Phase H Bridge Multilevel InverterDokument52 SeitenSingle Phase H Bridge Multilevel Inverterskrtamil0% (1)
- Experiment 7 AIM To Study The Potentiometer As An Error Detector. APPARATUS: Potentiometric Error Detector Kit Theoretical BackgroundDokument3 SeitenExperiment 7 AIM To Study The Potentiometer As An Error Detector. APPARATUS: Potentiometric Error Detector Kit Theoretical BackgroundSunayana Domadia100% (1)
- Chopper DriveDokument66 SeitenChopper Drivemazza23450% (2)
- Energy Audit Lab Experiments GuideDokument23 SeitenEnergy Audit Lab Experiments GuideNayandeep Gulhane100% (1)
- Different Types of Relays and Their Working PrinciplesDokument5 SeitenDifferent Types of Relays and Their Working PrinciplesArslan AliNoch keine Bewertungen
- μP Relay CharacteristicsDokument7 SeitenμP Relay CharacteristicsBhanu0% (1)
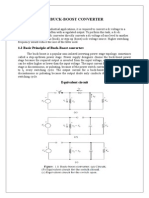
- Buck Boost ReportDokument10 SeitenBuck Boost ReportKarThiNoch keine Bewertungen
- Single Phase and Three Phase Rectifiers NumericalsDokument71 SeitenSingle Phase and Three Phase Rectifiers Numericalsaryan singhNoch keine Bewertungen
- Chapter - 1 Power Electronics ControlDokument0 SeitenChapter - 1 Power Electronics Controlwww.bhawesh.com.npNoch keine Bewertungen
- Project Report On Buck Boost ConverterDokument8 SeitenProject Report On Buck Boost Convertergmd technical100% (1)
- 520 L 0553Dokument52 Seiten520 L 0553dozer_kamil100% (1)
- Stability Analysis Using Routh-Hurwitz CriterionDokument34 SeitenStability Analysis Using Routh-Hurwitz CriterionNina ButtNoch keine Bewertungen
- Introduction To Process ControlDokument254 SeitenIntroduction To Process Controlkhaled_behery9934100% (1)
- Amorphous TransformerDokument41 SeitenAmorphous TransformerRamesh Babu0% (1)
- Jet FanDokument44 SeitenJet FanHai Pham100% (1)
- Festo ElectroPneumatics Basic Level TP201 012002 294Dokument294 SeitenFesto ElectroPneumatics Basic Level TP201 012002 294Avtomatika Kole Nehtenin100% (1)
- Instrumentacion Norma As 5.1Dokument78 SeitenInstrumentacion Norma As 5.1Julian StoehrNoch keine Bewertungen
- Single Phase Series InverterDokument9 SeitenSingle Phase Series InverterDhivya NNoch keine Bewertungen
- Exp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkDokument5 SeitenExp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkSnehil ChandraNoch keine Bewertungen
- Short Notes On Servo MotorDokument2 SeitenShort Notes On Servo MotorHimansu Goswami100% (3)
- Silicon Controlled Rectifier SCR - Two Transistor Model - Operating PrincipleDokument24 SeitenSilicon Controlled Rectifier SCR - Two Transistor Model - Operating PrinciplesixfacerajNoch keine Bewertungen
- Unit IV Static Relays and Numerical ProtectionDokument21 SeitenUnit IV Static Relays and Numerical ProtectionShashank Reddy100% (1)
- Variable Voltage & Frequency Controlled 3 Phase Induction MotorDokument6 SeitenVariable Voltage & Frequency Controlled 3 Phase Induction MotorNAVEED ISHRAQNoch keine Bewertungen
- HV Impulse CurrentDokument9 SeitenHV Impulse CurrentEdward CullenNoch keine Bewertungen
- Experiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierDokument4 SeitenExperiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierMohammed Dyhia Ali100% (2)
- Life Cycle Testing of Electrical Loads by Down CounterDokument4 SeitenLife Cycle Testing of Electrical Loads by Down CounterTRIAD TECHNO SERVICES50% (2)
- Single Phase InverterDokument7 SeitenSingle Phase InverterBHALAJI BIRLANoch keine Bewertungen
- Experiment 1-2 Three-Phase Half Controlled Converter PDFDokument2 SeitenExperiment 1-2 Three-Phase Half Controlled Converter PDFRAJENDRA KUMAWATNoch keine Bewertungen
- Lab 6: B J T B: Ipolar Unction Ransistor IasingDokument7 SeitenLab 6: B J T B: Ipolar Unction Ransistor IasingAhmed Ch100% (1)
- Characteristics of Over Voltage RelayDokument3 SeitenCharacteristics of Over Voltage RelaySasindran SNoch keine Bewertungen
- Single Phase Fully Controlled ConverterDokument10 SeitenSingle Phase Fully Controlled ConverterDeepu Chinna75% (4)
- Unijunction Transistor: By: Smridhi ChawlaDokument27 SeitenUnijunction Transistor: By: Smridhi Chawlasmridhi chawla100% (1)
- Remote Controlled Fan RegulatorDokument31 SeitenRemote Controlled Fan RegulatorPradeep100% (16)
- What is a Rectifier ExplainedDokument10 SeitenWhat is a Rectifier ExplainedRutvikNoch keine Bewertungen
- Characterstics of Static Relay UndervoltageovervoltageDokument7 SeitenCharacterstics of Static Relay Undervoltageovervoltagesaimanobhiram100% (2)
- Per-Unit System2009-3Dokument26 SeitenPer-Unit System2009-3Akinbode Sunday Oluwagbenga100% (1)
- Chapter - 4: Synchronous Motor DrivesDokument16 SeitenChapter - 4: Synchronous Motor DrivesSuganthiVasan67% (3)
- Synchronous Motor Drive Control MethodsDokument17 SeitenSynchronous Motor Drive Control MethodssidharthNoch keine Bewertungen
- 3-Phase Full Wave Converter DrivesDokument5 Seiten3-Phase Full Wave Converter DrivesAnb BajwaNoch keine Bewertungen
- Voltage Control of Single-Phase InvertersDokument17 SeitenVoltage Control of Single-Phase Invertersmailmanugs100% (1)
- 9.speed Control of DC Motor Using Chopper DriveDokument8 Seiten9.speed Control of DC Motor Using Chopper DriveDhivya N100% (1)
- IC 723 Voltage RegulatorsDokument16 SeitenIC 723 Voltage RegulatorsAtheessh .B0% (1)
- Electrical Machines Project ReportDokument4 SeitenElectrical Machines Project ReportSyed EbaduL HassanNoch keine Bewertungen
- ComparatorDokument32 SeitenComparatorShiv MeenaNoch keine Bewertungen
- 2.diode Clipper and ClamperDokument12 Seiten2.diode Clipper and ClamperMounika AllagaddaNoch keine Bewertungen
- Experiment No 5 The DC Series MotorDokument6 SeitenExperiment No 5 The DC Series MotorMadel Roque50% (2)
- Single Phase Induction Motor Starting MechanismsDokument25 SeitenSingle Phase Induction Motor Starting MechanismsKh Muhammad Mashood0% (1)
- DC Series Motor Single Phase Half & Full Controlled DrivesDokument11 SeitenDC Series Motor Single Phase Half & Full Controlled DrivesUjjal Dey100% (1)
- O.C.C. & Load Test On Separately Excited D.C. GeneratorDokument18 SeitenO.C.C. & Load Test On Separately Excited D.C. GeneratorSuyash KothawadeNoch keine Bewertungen
- Design of Regulated Power SupplyDokument18 SeitenDesign of Regulated Power SupplyDanish KhanNoch keine Bewertungen
- Root Locus ExperimentDokument2 SeitenRoot Locus Experimentnishantkothari77Noch keine Bewertungen
- Single Phase AC Voltage ControllerDokument6 SeitenSingle Phase AC Voltage Controllermozaher1Noch keine Bewertungen
- Basic Principles of Electrical MachinesDokument1 SeiteBasic Principles of Electrical MachinesPeter Favour80% (5)
- MA-415 Industrial Drives Lab IndexDokument19 SeitenMA-415 Industrial Drives Lab IndexMayankJainNoch keine Bewertungen
- DC Motor Position Control System - PremierDokument13 SeitenDC Motor Position Control System - PremierAAYUSH KUMARNoch keine Bewertungen
- Ac Position Control Trainer ManualDokument7 SeitenAc Position Control Trainer ManualSHANKARNoch keine Bewertungen
- Introduction to Electric DrivesDokument49 SeitenIntroduction to Electric DrivesRamesh BabuNoch keine Bewertungen
- Me 2205 Electrical Drives and Control: Unit I Introduction BY B.Durai Babu A.P/EeeDokument27 SeitenMe 2205 Electrical Drives and Control: Unit I Introduction BY B.Durai Babu A.P/Eeerupi bhatiaNoch keine Bewertungen
- EE 6351 - Electrical Drives and Controls (EDC) QBDokument160 SeitenEE 6351 - Electrical Drives and Controls (EDC) QBkannanchammyNoch keine Bewertungen
- DCDokument3 SeitenDCTauqeer KhanNoch keine Bewertungen
- Net Length of Iron (Unit-2 DC Machines)Dokument3 SeitenNet Length of Iron (Unit-2 DC Machines)Ramesh BabuNoch keine Bewertungen
- 1 - Ee8002 Dea Unit 5Dokument32 Seiten1 - Ee8002 Dea Unit 5Ramesh BabuNoch keine Bewertungen
- 1 - Ee8002 Dea Unit 5Dokument32 Seiten1 - Ee8002 Dea Unit 5Ramesh BabuNoch keine Bewertungen
- MMF of Air GapDokument4 SeitenMMF of Air GapRamesh BabuNoch keine Bewertungen
- PRES PPT2 Unit 1 Environment ImpactDokument52 SeitenPRES PPT2 Unit 1 Environment ImpactRamesh BabuNoch keine Bewertungen
- Unit 1 Magnetic Circuit DesignDokument11 SeitenUnit 1 Magnetic Circuit DesignRamesh BabuNoch keine Bewertungen
- Synchronous Machine Output Equation & Main DimensionsDokument21 SeitenSynchronous Machine Output Equation & Main DimensionsRamesh BabuNoch keine Bewertungen
- 3 - EE8002 DEA Unit 5Dokument21 Seiten3 - EE8002 DEA Unit 5Ramesh BabuNoch keine Bewertungen
- Solar Electricity: Engineering of Photovoltaic Systems by E. Lorenzo, G. Araujo, A. Cuevas, M. Egido, J. Minano, R. ZillesDokument7 SeitenSolar Electricity: Engineering of Photovoltaic Systems by E. Lorenzo, G. Araujo, A. Cuevas, M. Egido, J. Minano, R. ZillesRamesh Babu0% (1)
- Induction MotorDokument25 SeitenInduction MotorRamesh Babu0% (1)
- Unit 1 Ee2355 Machine DesignDokument21 SeitenUnit 1 Ee2355 Machine DesignRamesh BabuNoch keine Bewertungen
- Eqckt IndmotorDokument61 SeitenEqckt IndmotorRamesh BabuNoch keine Bewertungen
- Amorphous MetalDokument2 SeitenAmorphous MetalRamesh BabuNoch keine Bewertungen
- Everything You Need to Know About LEDs (Light Emitting DiodesDokument14 SeitenEverything You Need to Know About LEDs (Light Emitting DiodesRamesh BabuNoch keine Bewertungen
- Peo MC DesignDokument2 SeitenPeo MC DesignRamesh BabuNoch keine Bewertungen
- Electrical Technology - BakshiDokument160 SeitenElectrical Technology - Bakshibhargavt170% (1)
- DC Motor ControlDokument15 SeitenDC Motor ControlmalleswarararaoNoch keine Bewertungen
- EE402 RecitationDokument64 SeitenEE402 Recitationvignesh0617Noch keine Bewertungen
- AnnaDokument2 SeitenAnnaRamesh BabuNoch keine Bewertungen
- Electrical Technology - BakshiDokument160 SeitenElectrical Technology - Bakshibhargavt170% (1)
- Conference BrochureDokument4 SeitenConference BrochureRamesh BabuNoch keine Bewertungen
- Dimensions of Single & Three Phase TransformersDokument1 SeiteDimensions of Single & Three Phase TransformersRamesh BabuNoch keine Bewertungen
- Adaptive Smith Predictor PI Controller Improves HVAC System Temperature ControlDokument9 SeitenAdaptive Smith Predictor PI Controller Improves HVAC System Temperature Controlmatm333Noch keine Bewertungen
- LAB 02 Setting and Analyzing the Operating PointDokument2 SeitenLAB 02 Setting and Analyzing the Operating PointkalimullahNoch keine Bewertungen
- PLC SCADA Based Temperature Control SystemDokument5 SeitenPLC SCADA Based Temperature Control SystemSaurav TiwariNoch keine Bewertungen
- Feedback Control System CharacteristicsDokument17 SeitenFeedback Control System Characteristicsunnvishnu100% (1)
- iSCALE Control SystemDokument8 SeiteniSCALE Control SystemYipper ShnipperNoch keine Bewertungen
- Servomechanism For Steering of AntennaDokument6 SeitenServomechanism For Steering of AntennaAnastasia NapitupuluNoch keine Bewertungen
- Some PLC Based Project IdeasDokument5 SeitenSome PLC Based Project IdeasMehtab Ahmed0% (1)
- Tutorial - Boost PFC Converter Control Loop DesignDokument10 SeitenTutorial - Boost PFC Converter Control Loop Designbaguspermana7Noch keine Bewertungen
- York TS CondenserDokument16 SeitenYork TS Condenserrbooth80Noch keine Bewertungen
- LNG OperationDokument15 SeitenLNG OperationCharlesNoch keine Bewertungen
- Final Project Report On Mimo SystemDokument30 SeitenFinal Project Report On Mimo SystemDebayan Sen100% (1)
- A04-016 Touch Screen Controller)Dokument104 SeitenA04-016 Touch Screen Controller)Nguyen Thanh TrungNoch keine Bewertungen
- CHEM ENG 3P4 ASSIGNMENTDokument4 SeitenCHEM ENG 3P4 ASSIGNMENTVictoria HillierNoch keine Bewertungen
- Instrumentation and Control: 10.1 ObjectivesDokument8 SeitenInstrumentation and Control: 10.1 ObjectivesMuhammadNoch keine Bewertungen
- 100-800 HP Boiler Control System PLC HMI Safety FunctionsDokument4 Seiten100-800 HP Boiler Control System PLC HMI Safety FunctionssebaversaNoch keine Bewertungen
- A Fully Temperature Controlled Test Chamber For The Application of Gas Sensor Characterization PDFDokument6 SeitenA Fully Temperature Controlled Test Chamber For The Application of Gas Sensor Characterization PDFAcuña Lazaro AnthonyNoch keine Bewertungen
- IES EE Topic wise 2001-2008 Control System MCQsDokument101 SeitenIES EE Topic wise 2001-2008 Control System MCQsJeetu Raj50% (2)
- DC Motor Speed and Position Control ExperimentDokument8 SeitenDC Motor Speed and Position Control ExperimentCl SkyeNoch keine Bewertungen
- Unit 1 - Introduction To Control Systems - Part2 - SlidesDokument24 SeitenUnit 1 - Introduction To Control Systems - Part2 - SlidesSiphamandla CokaNoch keine Bewertungen