Das könnte Ihnen auch gefallen
- Governing System, DebmalyaDokument12 SeitenGoverning System, DebmalyaDipti Bhanja100% (1)
- 2301A Speed Control: ApplicationsDokument4 Seiten2301A Speed Control: ApplicationsSandeep Kumar KaloniyaNoch keine Bewertungen
- Remote and Automatic ControlDokument11 SeitenRemote and Automatic ControldenramrNoch keine Bewertungen
- 82514Dokument6 Seiten82514osocad100% (1)
- Introduction To Turbine Governing SystemsDokument33 SeitenIntroduction To Turbine Governing SystemsSam100% (1)
- Governor TutorialDokument13 SeitenGovernor TutorialWalid Fattah100% (1)
- Water turbine governor explainedDokument24 SeitenWater turbine governor explainedTanuj SharmaNoch keine Bewertungen
- SELCO T-Line Generator Control Protection MonitoringDokument8 SeitenSELCO T-Line Generator Control Protection MonitoringJesse GuoNoch keine Bewertungen
- Turbine governing system controls steam flow and speedDokument3 SeitenTurbine governing system controls steam flow and speedKiran KotaNoch keine Bewertungen
- C6.6 ENGINE - GENERATOR SET Operation & Maintenance Manuals - PARALLEL OPERATIONDokument4 SeitenC6.6 ENGINE - GENERATOR SET Operation & Maintenance Manuals - PARALLEL OPERATIONsuperteffyNoch keine Bewertungen
- 2301 Speed ControlDokument4 Seiten2301 Speed ControlCarlos SantosNoch keine Bewertungen
- Chapter 1. General Information: Installation and OperationDokument10 SeitenChapter 1. General Information: Installation and OperationGustavo PereiraNoch keine Bewertungen
- EHC NewDokument46 SeitenEHC NewSam100% (6)
- FOR Paralleling Module APM 2000Dokument4 SeitenFOR Paralleling Module APM 2000Jaffer HussainNoch keine Bewertungen
- Control of DC MotorsDokument2 SeitenControl of DC MotorsKuldeep SaxenaNoch keine Bewertungen
- KWU Electro Hydraulic Governing Final1Dokument41 SeitenKWU Electro Hydraulic Governing Final1Rahul Dev Goswami100% (2)
- In An Isolated System Prime Mover Generator May Operate in Droop Mode and Isochronous ModeDokument7 SeitenIn An Isolated System Prime Mover Generator May Operate in Droop Mode and Isochronous ModeSabeeh Hasnain100% (1)
- Generator Automatic Voltage Regulator Operation Manual: Tel: - Fax: - @Dokument8 SeitenGenerator Automatic Voltage Regulator Operation Manual: Tel: - Fax: - @Syed Mohammad Naveed100% (1)
- Basic GoverningDokument24 SeitenBasic GoverningMohamed RashidNoch keine Bewertungen
- TRACTION CONTROLLER UNIT FOR ELECTRIC VEHICLESDokument18 SeitenTRACTION CONTROLLER UNIT FOR ELECTRIC VEHICLESGiridharNoch keine Bewertungen
- Load Sharing and Speed Control Testing and AdjustinDokument11 SeitenLoad Sharing and Speed Control Testing and Adjustinlinkangjun0621Noch keine Bewertungen
- DYN1-10693-001-0-12 or DYN1-10693-001-0-24 PDFDokument8 SeitenDYN1-10693-001-0-12 or DYN1-10693-001-0-24 PDFSyed Mohammad Naveed100% (1)
- Hydro Governor OverviewDokument3 SeitenHydro Governor Overviewdrmsrmurty9473Noch keine Bewertungen
- KWU Electro Hydraulic Governing Final1Dokument41 SeitenKWU Electro Hydraulic Governing Final1Sam80% (5)
- Automatic Transfer Switch EssentialsDokument5 SeitenAutomatic Transfer Switch EssentialsCandiano PopescuNoch keine Bewertungen
- Retro-Fitting The Expansion ConnectorDokument5 SeitenRetro-Fitting The Expansion ConnectorSiddharth TiwariNoch keine Bewertungen
- Gac Esd5500Dokument7 SeitenGac Esd5500christramNoch keine Bewertungen
- Sheet 6: Electrical System--Accelerator Controls and ContactorsDokument13 SeitenSheet 6: Electrical System--Accelerator Controls and ContactorsAndy FranzNoch keine Bewertungen
- Coordinate Control System: TurbineDokument5 SeitenCoordinate Control System: TurbineGolu kumar100% (2)
- Ehtc JharliDokument38 SeitenEhtc JharliRakesh Bagri100% (2)
- 07 Tur Gov - STDDokument62 Seiten07 Tur Gov - STDgautamntpc100% (2)
- EHTCDokument26 SeitenEHTCmoovendan pNoch keine Bewertungen
- Ec5111 6-09 PDFDokument5 SeitenEc5111 6-09 PDFAnonymous M0OEZEKoGiNoch keine Bewertungen
- IM05805023K - XTJP - Op - Manual - RH2 - 06-07-12Dokument12 SeitenIM05805023K - XTJP - Op - Manual - RH2 - 06-07-12melgarcia829Noch keine Bewertungen
- Lab 6 Kawalan MotorDokument20 SeitenLab 6 Kawalan MotorMohd FiqrieNoch keine Bewertungen
- 2301A Speed Control: ApplicationsDokument4 Seiten2301A Speed Control: ApplicationsS M NaveedNoch keine Bewertungen
- Speed Control 2301ADokument4 SeitenSpeed Control 2301AAdi Setiyo Prabowo100% (1)
- Service Training Manual Transmisión ML260 For JCBDokument84 SeitenService Training Manual Transmisión ML260 For JCBDaniel Aguirre100% (1)
- Automatic Load Frequency and Voltage ControlDokument24 SeitenAutomatic Load Frequency and Voltage ControlVargub Lahkar100% (1)
- ESD5100 Series Speed Control UnitDokument2 SeitenESD5100 Series Speed Control UnitJaimeCoelloNoch keine Bewertungen
- The Robust M200D AS-i Basic Motor Starter Can Be Installed Outside The Control Cabinet and Close To TheDokument4 SeitenThe Robust M200D AS-i Basic Motor Starter Can Be Installed Outside The Control Cabinet and Close To TheVarun AgarwalNoch keine Bewertungen
- Unit Iii Induction Motor Drives: Dept. of EEEDokument17 SeitenUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarNoch keine Bewertungen
- System Description: Brief Description OF Static Excitation EquipmentDokument8 SeitenSystem Description: Brief Description OF Static Excitation EquipmentKuenley TiNy OndeNoch keine Bewertungen
- Variador Yanwa AcerosDokument9 SeitenVariador Yanwa Acerosjuan Carlos GonzalezNoch keine Bewertungen
- Thermal Power Plant Simulator TPP 200 Laboratory Exercise Tutorial N1: Rolling Up of Turbine Train and Connection of Generator To The GridDokument13 SeitenThermal Power Plant Simulator TPP 200 Laboratory Exercise Tutorial N1: Rolling Up of Turbine Train and Connection of Generator To The GridPriyajit SahooNoch keine Bewertungen
- EHC1Dokument30 SeitenEHC1Jagadeesan SaiNoch keine Bewertungen
- Governing System of Turbines (200 MW)Dokument18 SeitenGoverning System of Turbines (200 MW)Debasish Dewan100% (2)
- BMW Cruise Control E23 E28Dokument14 SeitenBMW Cruise Control E23 E28onukvedat72190% (1)
- ISO 9001 CERTIFIED SPEED CONTROL UNIT DOCUMENTDokument2 SeitenISO 9001 CERTIFIED SPEED CONTROL UNIT DOCUMENTajcapetillog100% (2)
- Control electric motorsDokument11 SeitenControl electric motorsBenjamin OmorakaNoch keine Bewertungen
- Speed Control of DC MotorDokument18 SeitenSpeed Control of DC Motorkrishnareddy_chintalaNoch keine Bewertungen
- Eddy Current Drives-Holland IndustrialDokument3 SeitenEddy Current Drives-Holland IndustrialAirton FloresNoch keine Bewertungen
- 210 MW Turbine GoverningDokument16 Seiten210 MW Turbine GoverningAshish Subramanian100% (1)
- Notes For Centre Wind Drive Applications: Speed or Torque ControlDokument10 SeitenNotes For Centre Wind Drive Applications: Speed or Torque ControlmeledathNoch keine Bewertungen
- Write Up On EHC - REV-01Dokument11 SeitenWrite Up On EHC - REV-01jp mishra100% (2)
- Study of SMES Technology & Its Integration To AGC: and E, Connected Through Consider The Simple PowerDokument22 SeitenStudy of SMES Technology & Its Integration To AGC: and E, Connected Through Consider The Simple PowerzahidNoch keine Bewertungen
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsVon EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetVon EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Balance Energia TFADokument11 SeitenBalance Energia TFAVictor Timana SilvaNoch keine Bewertungen
- TFI Instruction Manual ZB400II - Catalogo de RepuestosDokument31 SeitenTFI Instruction Manual ZB400II - Catalogo de RepuestosVictor Timana SilvaNoch keine Bewertungen
- Sanitech - PartesDokument21 SeitenSanitech - PartesVictor Timana Silva0% (1)
- Catalogo de CalentadoresDokument58 SeitenCatalogo de CalentadoresVictor Timana SilvaNoch keine Bewertungen
- Lista de Partes PTO-880-M1 US Final 06.14.12Dokument36 SeitenLista de Partes PTO-880-M1 US Final 06.14.12Victor Timana SilvaNoch keine Bewertungen
- Manual MSA2 SandPiperDokument9 SeitenManual MSA2 SandPiperVictor Timana SilvaNoch keine Bewertungen
- Valvula Tyco FlowDokument16 SeitenValvula Tyco FlowVictor Timana SilvaNoch keine Bewertungen
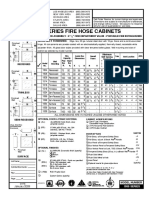
- Gabinete Contraincendio IIDokument2 SeitenGabinete Contraincendio IIVictor Timana SilvaNoch keine Bewertungen
- Manual de Partes Corona T-106Dokument12 SeitenManual de Partes Corona T-106Victor Timana SilvaNoch keine Bewertungen
- Manual Partes Motosoldadora Trailblazer 302 DieselDokument12 SeitenManual Partes Motosoldadora Trailblazer 302 DieselVictor Timana SilvaNoch keine Bewertungen
- Installation, Maintenaince and Service Braden PD15B, PD12C, PD17ADokument39 SeitenInstallation, Maintenaince and Service Braden PD15B, PD12C, PD17ALázaro ConcepcionNoch keine Bewertungen
- Manual Servicio TZ 50Dokument168 SeitenManual Servicio TZ 50Victor Timana SilvaNoch keine Bewertungen
- Manual Partes Motosoldadora Trailblazer 302 DieselDokument12 SeitenManual Partes Motosoldadora Trailblazer 302 DieselVictor Timana SilvaNoch keine Bewertungen
- Woodward Sp2301aDokument40 SeitenWoodward Sp2301aVictor Timana SilvaNoch keine Bewertungen
- Current Electricity McqsDokument31 SeitenCurrent Electricity McqsM.Tharun KumarNoch keine Bewertungen
- Physical Science P1 Additional Exemplar Eng 2008Dokument19 SeitenPhysical Science P1 Additional Exemplar Eng 2008Omphemetse MotlobaNoch keine Bewertungen
- Arc 250-250DDokument1 SeiteArc 250-250DRizk ElkhoolyNoch keine Bewertungen
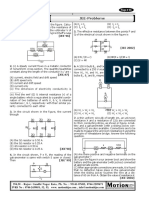
- Exercise - V: JEE-ProblemsDokument4 SeitenExercise - V: JEE-ProblemsTejas SalviNoch keine Bewertungen
- Sensor de Ca Con Arduino lm358Dokument4 SeitenSensor de Ca Con Arduino lm358Wilfredo CindetNoch keine Bewertungen
- Graco Sprayers309226mDokument40 SeitenGraco Sprayers309226mGary SapirsteinNoch keine Bewertungen
- Question Bank BEEDokument5 SeitenQuestion Bank BEEK.Sushita VISTASNoch keine Bewertungen
- Aliasgar Dedanwala - Gizmo Circuits and ResistanceDokument6 SeitenAliasgar Dedanwala - Gizmo Circuits and ResistanceJonan SotoNoch keine Bewertungen
- Magnetic Acuator ManualDokument7 SeitenMagnetic Acuator ManualSUDDHA CHAKRABARTYNoch keine Bewertungen
- Level Past Paper Questions - Physics O: TOPIC-14 DC Circuits PAPER-1 Multiple ChoiceDokument17 SeitenLevel Past Paper Questions - Physics O: TOPIC-14 DC Circuits PAPER-1 Multiple Choiceelty Tan50% (2)
- Batching Plant CP30-MCI70N MANUAL (Latest)Dokument180 SeitenBatching Plant CP30-MCI70N MANUAL (Latest)DIBNESH PANDITA90% (10)
- BMW X6 HevDokument131 SeitenBMW X6 HevLojan Coronel José HumbertoNoch keine Bewertungen
- Me N Mine Science X Ist TermDokument101 SeitenMe N Mine Science X Ist Termneelanshujain68% (19)
- JVC Av21q3d TV SMDokument10 SeitenJVC Av21q3d TV SMtelevizionistulNoch keine Bewertungen
- EmsDokument46 SeitenEmsravi kumarNoch keine Bewertungen
- Electric field in a plate capacitorDokument5 SeitenElectric field in a plate capacitorRayane RayanoNoch keine Bewertungen
- Section-7-Batteries-Battery Chargers-DCDBDokument23 SeitenSection-7-Batteries-Battery Chargers-DCDBthumula.rameshNoch keine Bewertungen
- ECE422L Activity No. 04 Capacitors and Capacitance MarasiganAA, UmaliGCDDokument19 SeitenECE422L Activity No. 04 Capacitors and Capacitance MarasiganAA, UmaliGCDAlexis MarasiganNoch keine Bewertungen
- Solar Products Presentation Neety Euro Asia Solar EnergyDokument63 SeitenSolar Products Presentation Neety Euro Asia Solar Energydankhara_ishwar9458Noch keine Bewertungen
- Experiments in CircuitsDokument34 SeitenExperiments in CircuitsAmulyaNoch keine Bewertungen
- UL White Paper Dielectric Voltage Withstand TestDokument5 SeitenUL White Paper Dielectric Voltage Withstand TestULdialogueNoch keine Bewertungen
- Pvsi NC Ii CBLM Core Competency 5 Perfor PV Systems Testing and CommissioningDokument128 SeitenPvsi NC Ii CBLM Core Competency 5 Perfor PV Systems Testing and CommissioningFRANCIS BERJA100% (1)
- US20140111054A1-Generator Cu Bobine Îmbunătățite Pentru Ai Spori Proprietățile electrodinamice-US20140111054ADokument21 SeitenUS20140111054A1-Generator Cu Bobine Îmbunătățite Pentru Ai Spori Proprietățile electrodinamice-US20140111054AbluesurviverNoch keine Bewertungen
- Solucionario SerwayDokument20 SeitenSolucionario SerwayBrenda DonisNoch keine Bewertungen
- Ets Control CaterpillarDokument15 SeitenEts Control Caterpillarpablo88% (8)
- 334-Electrical and Electronics EngineeringDokument227 Seiten334-Electrical and Electronics Engineeringmoyeen786khanNoch keine Bewertungen
- Introduction To Circuits Remote LabDokument6 SeitenIntroduction To Circuits Remote LabLeen Haniya50% (2)
- Lab - 01Dokument7 SeitenLab - 01Shahid ButtNoch keine Bewertungen
- Over Voltages ProtectionDokument5 SeitenOver Voltages ProtectionManish KushwahaNoch keine Bewertungen
- Chapter 15 Direct Current CircuitDokument25 SeitenChapter 15 Direct Current CircuitPunitha MarimuthooNoch keine Bewertungen