Das könnte Ihnen auch gefallen
- Sisdl 2013 06 Input Data PDFDokument52 SeitenSisdl 2013 06 Input Data PDFDjuan RochmanNoch keine Bewertungen
- Digital Raster Graphic: Unveiling the Power of Digital Raster Graphics in Computer VisionVon EverandDigital Raster Graphic: Unveiling the Power of Digital Raster Graphics in Computer VisionNoch keine Bewertungen
- Scanners 1Dokument18 SeitenScanners 1djnr1jana100% (2)
- Digital Capture Devices High End ScannersDokument71 SeitenDigital Capture Devices High End ScannersAmir SalahNoch keine Bewertungen
- Computer Vision CS-6350: Prof. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai - 600036Dokument48 SeitenComputer Vision CS-6350: Prof. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai - 600036Nadia F Mohammad Al-RoshdeeNoch keine Bewertungen
- Course No: CAP616T Course Title:: Computer GraphicsDokument4 SeitenCourse No: CAP616T Course Title:: Computer GraphicsAman LobanaNoch keine Bewertungen
- Lect1 BaiTap ThietBiDokument54 SeitenLect1 BaiTap ThietBi19021331 Phạm Vũ MinhNoch keine Bewertungen
- Overview of Graphics SystemsDokument74 SeitenOverview of Graphics SystemsNader NazihNoch keine Bewertungen
- Cypress Image Sensors: Design Without ConstraintsDokument8 SeitenCypress Image Sensors: Design Without ConstraintsPalompon PalNoch keine Bewertungen
- 202004021910156883ajay Misra Geo Digital Image ProcessingDokument24 Seiten202004021910156883ajay Misra Geo Digital Image Processingبارق محمودNoch keine Bewertungen
- Vision Meets Robotics: The KITTI Dataset: Andreas Geiger, Philip Lenz, Christoph Stiller and Raquel UrtasunDokument6 SeitenVision Meets Robotics: The KITTI Dataset: Andreas Geiger, Philip Lenz, Christoph Stiller and Raquel Urtasuntrí nguyễnNoch keine Bewertungen
- Overview of Graphics SystemsDokument74 SeitenOverview of Graphics Systemsprasanasridhar100% (1)
- Measurement Strategy For Tracking A Tennis Ball Using Microsoft Kinect Like TechnologyDokument9 SeitenMeasurement Strategy For Tracking A Tennis Ball Using Microsoft Kinect Like TechnologyPratik AcharyaNoch keine Bewertungen
- ICX445Dokument2 SeitenICX445Brad E HinesNoch keine Bewertungen
- Sensors On 3d DigitizationDokument24 SeitenSensors On 3d DigitizationprincegirishNoch keine Bewertungen
- Dig Photo 1Dokument27 SeitenDig Photo 1Frehywot Abebe ShibeshiNoch keine Bewertungen
- Radiology Review Course 2Dokument105 SeitenRadiology Review Course 2Ajay KhadkaNoch keine Bewertungen
- CSC4221 Lecture 1 - IntroductionDokument60 SeitenCSC4221 Lecture 1 - IntroductionAhmad AbbaNoch keine Bewertungen
- Coding With OpenCVDokument36 SeitenCoding With OpenCVRahul GoradiaNoch keine Bewertungen
- Introduction-Part 2Dokument38 SeitenIntroduction-Part 2Hassan .YNoch keine Bewertungen
- RasterisationDokument2 SeitenRasterisationwaqarakramNoch keine Bewertungen
- GE Vivid S6 DatasheetDokument12 SeitenGE Vivid S6 Datasheetbashir019Noch keine Bewertungen
- What Is Photogrammetry?: Photos - Light Gramma - To Draw Metron - To MeasureDokument63 SeitenWhat Is Photogrammetry?: Photos - Light Gramma - To Draw Metron - To MeasureELADIONoch keine Bewertungen
- A Report On: Nwaogwugwu Tochukwu CollinsDokument7 SeitenA Report On: Nwaogwugwu Tochukwu CollinsTochukwu CollinsNoch keine Bewertungen
- Fingerprint Recognisation Technology (F.R.T)Dokument37 SeitenFingerprint Recognisation Technology (F.R.T)Gemechu AyanaNoch keine Bewertungen
- Eagle Color SeriesDokument2 SeitenEagle Color SeriestrumukyNoch keine Bewertungen
- Sensor On 3D DigitizationDokument22 SeitenSensor On 3D DigitizationFaiz Karobari ShahDewanNoch keine Bewertungen
- Computer Systems Computer Systems: Assignment 1 - Topic: ScannersDokument7 SeitenComputer Systems Computer Systems: Assignment 1 - Topic: ScannersEric MingNoch keine Bewertungen
- Exam SolutionDokument11 SeitenExam SolutionasmaaNoch keine Bewertungen
- Fingerprint 04Dokument29 SeitenFingerprint 04Sowmya ShivakumarNoch keine Bewertungen
- Dig Photo 1 PDFDokument27 SeitenDig Photo 1 PDFAndenet AshagrieNoch keine Bewertungen
- Image Scanner: From Wikipedia, The Free EncyclopediaDokument11 SeitenImage Scanner: From Wikipedia, The Free EncyclopediaDesty DeaNoch keine Bewertungen
- 15arspc Submission 175Dokument16 Seiten15arspc Submission 175reneebartoloNoch keine Bewertungen
- Computer Graphics - HandoutsDokument26 SeitenComputer Graphics - HandoutsSaqib HayatNoch keine Bewertungen
- Computer GraphicsDokument68 SeitenComputer GraphicsAshish MahendraNoch keine Bewertungen
- Spatial Information & GeometricsDokument9 SeitenSpatial Information & GeometricsZeeshan FirdousNoch keine Bewertungen
- Lecture 1a-Overview of Graphics SystemsDokument77 SeitenLecture 1a-Overview of Graphics SystemsMusembi JosephNoch keine Bewertungen
- OIE 751 ROBOTICS Unit 3 Class 5 (19-9-2020)Dokument14 SeitenOIE 751 ROBOTICS Unit 3 Class 5 (19-9-2020)MICHEL RAJ100% (1)
- Dig ImagingDokument19 SeitenDig ImagingNaveenNoch keine Bewertungen
- Radiography Tech Guide de WWW - OrthodonticproductsonlineDokument2 SeitenRadiography Tech Guide de WWW - OrthodonticproductsonlineIvan EduardoNoch keine Bewertungen
- MX8000 Quad DatasheetDokument3 SeitenMX8000 Quad DatasheetStephanie BairdNoch keine Bewertungen
- Flatbed Input DevicesDokument21 SeitenFlatbed Input DevicesJaydeep PatelNoch keine Bewertungen
- ScannersDokument10 SeitenScannersapi-238599636Noch keine Bewertungen
- Presented by K.Shiva Shankar Reddy (Ii Cse) & K.Srinivasa Rao (Ii Cse)Dokument15 SeitenPresented by K.Shiva Shankar Reddy (Ii Cse) & K.Srinivasa Rao (Ii Cse)api-19799369Noch keine Bewertungen
- How Scanners WorkDokument8 SeitenHow Scanners Workvs6886Noch keine Bewertungen
- Module 1Dokument29 SeitenModule 1rofiwi6692Noch keine Bewertungen
- 28 Sep 2015 DATA - INPUTTING - Editing - EDUSAT - Raju PDFDokument41 Seiten28 Sep 2015 DATA - INPUTTING - Editing - EDUSAT - Raju PDFShubham JoshiNoch keine Bewertungen
- Theory of OperationDokument11 SeitenTheory of Operationsyh.zeeshanNoch keine Bewertungen
- Digital Image and Mathematical Representation-WKFDokument39 SeitenDigital Image and Mathematical Representation-WKFAqmal Insan cendekiaNoch keine Bewertungen
- DIGITAL IMAGE PROCESSING2 PresentationDokument16 SeitenDIGITAL IMAGE PROCESSING2 PresentationKavya ChumNoch keine Bewertungen
- Digital Video Processing for Engineers: A Foundation for Embedded Systems DesignVon EverandDigital Video Processing for Engineers: A Foundation for Embedded Systems DesignNoch keine Bewertungen
- Flyer QTSculptor-System enDokument4 SeitenFlyer QTSculptor-System enKrunal PatelNoch keine Bewertungen
- Digital Radiography - Sunil SeksanaDokument65 SeitenDigital Radiography - Sunil Seksanamanishbabu100% (7)
- Introduction To Digital Image Processing: OutlineDokument24 SeitenIntroduction To Digital Image Processing: OutlineMalwatteNoch keine Bewertungen
- Gis Data Input Using Scanners and DigitizersDokument38 SeitenGis Data Input Using Scanners and DigitizersShweta SinghNoch keine Bewertungen
- Leica ADS80Dokument42 SeitenLeica ADS80Barbulescu Constantin IonutNoch keine Bewertungen
- Human Motion Detection in Manufacturing Process: Ágnes Lipovits, Mónika Gál, Péter József Kiss, Csaba SüvegesDokument8 SeitenHuman Motion Detection in Manufacturing Process: Ágnes Lipovits, Mónika Gál, Péter József Kiss, Csaba SüvegesFarid MukhtarNoch keine Bewertungen
- Siemens ECAT BrochureDokument22 SeitenSiemens ECAT BrochureKevin MendozaNoch keine Bewertungen
- Raster Graphics Editor: Transforming Visual Realities: Mastering Raster Graphics Editors in Computer VisionVon EverandRaster Graphics Editor: Transforming Visual Realities: Mastering Raster Graphics Editors in Computer VisionNoch keine Bewertungen
- SI - No: Sampling Done During High TideDokument10 SeitenSI - No: Sampling Done During High TideBhuvana EswariNoch keine Bewertungen
- CVC List: Short A: - Ad - Ag - An - Ap - at OtherDokument5 SeitenCVC List: Short A: - Ad - Ag - An - Ap - at OtherBhuvana EswariNoch keine Bewertungen
- P-1508 RU-ModelDokument1 SeiteP-1508 RU-ModelBhuvana EswariNoch keine Bewertungen
- Winners ListDokument46 SeitenWinners ListBhuvana EswariNoch keine Bewertungen
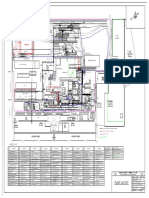
- Cover Page Inner Page and Contents - ICGS - ThondiDokument4 SeitenCover Page Inner Page and Contents - ICGS - ThondiBhuvana EswariNoch keine Bewertungen
- List Od Land FormsDokument4 SeitenList Od Land FormsBhuvana EswariNoch keine Bewertungen
- Report - ICGS ThondiDokument9 SeitenReport - ICGS ThondiBhuvana EswariNoch keine Bewertungen
- Prob Village ListDokument2 SeitenProb Village ListBhuvana EswariNoch keine Bewertungen
- Yoga Udupi TalukDokument52 SeitenYoga Udupi TalukBhuvana EswariNoch keine Bewertungen
- ListDokument1 SeiteListBhuvana EswariNoch keine Bewertungen
- APFisheries Dept Information Dt.29.01.2018 For APCZMPDokument83 SeitenAPFisheries Dept Information Dt.29.01.2018 For APCZMPBhuvana EswariNoch keine Bewertungen
- Institute of Remote Sensing: Latitude Longitude Date of Sampling Si - No Degree Min Sec 1 Degree Min Sec Day Month YearDokument2 SeitenInstitute of Remote Sensing: Latitude Longitude Date of Sampling Si - No Degree Min Sec 1 Degree Min Sec Day Month YearBhuvana EswariNoch keine Bewertungen
- Bandora Panchayat - Draft - 3 - SLC Final 1 ColourDokument1 SeiteBandora Panchayat - Draft - 3 - SLC Final 1 ColourBhuvana EswariNoch keine Bewertungen
- Status of Tourism: Table 5: Timeline Data of Tourist Arrivals (In Million) Year Tourist To Uttarakhand Tourist To IndiaDokument1 SeiteStatus of Tourism: Table 5: Timeline Data of Tourist Arrivals (In Million) Year Tourist To Uttarakhand Tourist To IndiaBhuvana EswariNoch keine Bewertungen
- Recruitment Contract 16may2014Dokument4 SeitenRecruitment Contract 16may2014Bhuvana EswariNoch keine Bewertungen
- What IsDokument210 SeitenWhat IsBhuvana EswariNoch keine Bewertungen
- The Application of A Continuous Strip of Woven Material To A Body PartDokument15 SeitenThe Application of A Continuous Strip of Woven Material To A Body Partczeremar chanNoch keine Bewertungen
- Event Management (MAX FIT)Dokument12 SeitenEvent Management (MAX FIT)vkrish6Noch keine Bewertungen
- Feeding Pipe 2'' L 20m: General Plan Al-Sabaeen Pv-Diesel SystemDokument3 SeitenFeeding Pipe 2'' L 20m: General Plan Al-Sabaeen Pv-Diesel Systemمحمد الحديNoch keine Bewertungen
- Feed Water Heater ValvesDokument4 SeitenFeed Water Heater ValvesMukesh AggarwalNoch keine Bewertungen
- Solution Problem 1 Problems Handouts MicroDokument25 SeitenSolution Problem 1 Problems Handouts MicrokokokoNoch keine Bewertungen
- RH S65A SSVR Users ManualDokument11 SeitenRH S65A SSVR Users ManualMohd Fauzi YusohNoch keine Bewertungen
- SOPDokument2 SeitenSOPDesiree MatienzoNoch keine Bewertungen
- Manual de Parts ES16D6Dokument36 SeitenManual de Parts ES16D6Eduardo CortezNoch keine Bewertungen
- Samsung UDC and UEC Series Video Wall DisplaysDokument12 SeitenSamsung UDC and UEC Series Video Wall DisplaysWebAntics.com Online Shopping StoreNoch keine Bewertungen
- The 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayDokument15 SeitenThe 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayAkshwin KisoreNoch keine Bewertungen
- Pas 1, Presentation of Financial Statements: Philippine Institute of Certified Public AccountantsDokument38 SeitenPas 1, Presentation of Financial Statements: Philippine Institute of Certified Public AccountantsAie GeraldinoNoch keine Bewertungen
- Class Participation 9 E7-18: Last Name - First Name - IDDokument2 SeitenClass Participation 9 E7-18: Last Name - First Name - IDaj singhNoch keine Bewertungen
- Defensive Driving TrainingDokument19 SeitenDefensive Driving TrainingSheri DiĺlNoch keine Bewertungen
- History of BRAC BankDokument7 SeitenHistory of BRAC Bankrayhan555Noch keine Bewertungen
- Roasted and Ground Coffee Manufacturing Industry Feasibility StudyDokument22 SeitenRoasted and Ground Coffee Manufacturing Industry Feasibility StudyGhirmaye AbebeNoch keine Bewertungen
- Datascope System 98Dokument16 SeitenDatascope System 98Guillermo ZalazarNoch keine Bewertungen
- U HalliburtonDokument3 SeitenU Halliburtonanas soufNoch keine Bewertungen
- Khrone 5 Beam Flow Meter DatasheetDokument16 SeitenKhrone 5 Beam Flow Meter DatasheetAnoop ChulliyanNoch keine Bewertungen
- MVC Plus User Manual REV5Dokument90 SeitenMVC Plus User Manual REV5Adalberto FentanezNoch keine Bewertungen
- Boeing 247 NotesDokument5 SeitenBoeing 247 Notesalbloi100% (1)
- Transparency in Organizing: A Performative Approach: Oana Brindusa AlbuDokument272 SeitenTransparency in Organizing: A Performative Approach: Oana Brindusa AlbuPhương LêNoch keine Bewertungen
- Bromate Prove Ulr en 2016-01-06 HintDokument3 SeitenBromate Prove Ulr en 2016-01-06 Hinttata_77Noch keine Bewertungen
- 7a.simple InterestDokument50 Seiten7a.simple InterestJanani MaranNoch keine Bewertungen
- Viper 5000 Installations Guide PDFDokument39 SeitenViper 5000 Installations Guide PDFvakakoNoch keine Bewertungen
- Gears, Splines, and Serrations: Unit 24Dokument8 SeitenGears, Splines, and Serrations: Unit 24Satish Dhandole100% (1)
- HAART PresentationDokument27 SeitenHAART PresentationNali peterNoch keine Bewertungen
- Arba Minch University Institute of Technology Faculty of Computing & Software EngineeringDokument65 SeitenArba Minch University Institute of Technology Faculty of Computing & Software Engineeringjemu mamedNoch keine Bewertungen
- Book Shop InventoryDokument21 SeitenBook Shop InventoryAli AnsariNoch keine Bewertungen
- EquisetopsidaDokument4 SeitenEquisetopsidax456456456xNoch keine Bewertungen
- AWS Migrate Resources To New RegionDokument23 SeitenAWS Migrate Resources To New Regionsruthi raviNoch keine Bewertungen