Das könnte Ihnen auch gefallen
- DDD - 410575 - Carret. Villa El Carmen - San Cayetano - 20170629 - V1.0Dokument6 SeitenDDD - 410575 - Carret. Villa El Carmen - San Cayetano - 20170629 - V1.0Marielba BernottyNoch keine Bewertungen
- SF QV10 BDokument1 SeiteSF QV10 BMarielba BernottyNoch keine Bewertungen
- Product Specifications Product Specifications: MT MT - 196 196 - 14 14Dokument2 SeitenProduct Specifications Product Specifications: MT MT - 196 196 - 14 14Marielba BernottyNoch keine Bewertungen
- MT 196 14 PDFDokument2 SeitenMT 196 14 PDFMarielba BernottyNoch keine Bewertungen
- P - AT&T Ericsson - Sacramento - 2010 LTE Sites - CNU3657 - 01-Construction - Rev 4 - CNU3657 T-1Dokument13 SeitenP - AT&T Ericsson - Sacramento - 2010 LTE Sites - CNU3657 - 01-Construction - Rev 4 - CNU3657 T-1Marielba BernottyNoch keine Bewertungen
- ZXSDR BS8900 GU360 (V4.09.21) Outdoor GSM UMTS Dual Mode Macro Node B System DescriptionDokument56 SeitenZXSDR BS8900 GU360 (V4.09.21) Outdoor GSM UMTS Dual Mode Macro Node B System Descriptionashu17Noch keine Bewertungen
- 80010306V02 (9364785a) PDFDokument2 Seiten80010306V02 (9364785a) PDFMarielba BernottyNoch keine Bewertungen
- HBXX 3817tb1 VTM DatasheetDokument4 SeitenHBXX 3817tb1 VTM DatasheetMarielba BernottyNoch keine Bewertungen
- ProximyDokument87 SeitenProximyMarielba BernottyNoch keine Bewertungen
- Manual OtisDokument323 SeitenManual OtisMarielba Bernotty84% (49)
- Substation DesignDokument764 SeitenSubstation Designprashious100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Introduction To LogicDokument4 SeitenIntroduction To LogicLykwhat UwantNoch keine Bewertungen
- TOPIC: Assessing The Knowledge and Attitude Towards Online Netiquette of High School Students of Mandaue City Comprehensive National High SchoolDokument12 SeitenTOPIC: Assessing The Knowledge and Attitude Towards Online Netiquette of High School Students of Mandaue City Comprehensive National High SchoolMarjoe MejiasNoch keine Bewertungen
- Take Home ExamDokument10 SeitenTake Home ExamRaine PiliinNoch keine Bewertungen
- The Psychology of Human SexualityDokument26 SeitenThe Psychology of Human SexualityHailie JadeNoch keine Bewertungen
- Completed Component 1 Learner Statement Y2Dokument6 SeitenCompleted Component 1 Learner Statement Y2api-538905113Noch keine Bewertungen
- "Lifting - Lug" - Lifting Lug Analysis: Program DescriptionDokument3 Seiten"Lifting - Lug" - Lifting Lug Analysis: Program Descriptionnamasral100% (3)
- Bs - Civil Engineering 2023 24Dokument1 SeiteBs - Civil Engineering 2023 24DawnNoch keine Bewertungen
- Astm D2196-10Dokument5 SeitenAstm D2196-10Bryan de BarrosNoch keine Bewertungen
- Arranged By: Agnya Yasmin Agami (1807693)Dokument9 SeitenArranged By: Agnya Yasmin Agami (1807693)Rizki AshidiqNoch keine Bewertungen
- DLP 1 - WEEK 1-Food Processing-Tools, EquipmentDokument4 SeitenDLP 1 - WEEK 1-Food Processing-Tools, EquipmentAnalyn B. AbelaNoch keine Bewertungen
- Year 3 Spring Block 1 Multiplcation and DivisionDokument32 SeitenYear 3 Spring Block 1 Multiplcation and DivisionCeciNoch keine Bewertungen
- Structure and Bonding in Crystalline Materials - G. Rohrer (Cambridge, 2004) WW PDFDokument552 SeitenStructure and Bonding in Crystalline Materials - G. Rohrer (Cambridge, 2004) WW PDFOmar Alejandro Salazar0% (1)
- Natural Blends Inc 1Dokument2 SeitenNatural Blends Inc 1Álvaro Jurado0% (1)
- EN116 WebDokument44 SeitenEN116 WebX 6Noch keine Bewertungen
- Mandowsky RicercheintornoallIconologia 1939Dokument22 SeitenMandowsky RicercheintornoallIconologia 1939Alejandro Jaquero EsparciaNoch keine Bewertungen
- Organization of LifeDokument1 SeiteOrganization of LifeSiraj ShaikNoch keine Bewertungen
- Datenblatt Serie-33X eDokument9 SeitenDatenblatt Serie-33X eBoody CNoch keine Bewertungen
- Abaqus Automatic Stabilization When and How To Use ItDokument8 SeitenAbaqus Automatic Stabilization When and How To Use ItBingkuai bigNoch keine Bewertungen
- EN22307194-Ranathunga R.A.S.S-Tensile Testing of Metals.Dokument16 SeitenEN22307194-Ranathunga R.A.S.S-Tensile Testing of Metals.Nipun DinushaNoch keine Bewertungen
- Tinnitus Assessment Thi ScoringDokument4 SeitenTinnitus Assessment Thi ScoringbssNoch keine Bewertungen
- Experimental Designs in Sentence Processing Research: A Methodological Review and User's GuideDokument32 SeitenExperimental Designs in Sentence Processing Research: A Methodological Review and User's Guidesara1744Noch keine Bewertungen
- ICETEMS-18 Abstract Book PDFDokument152 SeitenICETEMS-18 Abstract Book PDFJAMILNoch keine Bewertungen
- PuzzlesDokument9 SeitenPuzzlespraveen_1288Noch keine Bewertungen
- Essay ReviseDokument4 SeitenEssay ReviseHanifah IndrianaNoch keine Bewertungen
- Week 2 Measurement of Fluid PropertiesDokument7 SeitenWeek 2 Measurement of Fluid PropertiesHafidzSecretzboyzNoch keine Bewertungen
- Metrology and Mechanical MeasurementsDokument118 SeitenMetrology and Mechanical MeasurementsNihar ApteNoch keine Bewertungen
- Sedimentologi - Transport Dan Pengendapan Sedimen Silisiklastik PDFDokument45 SeitenSedimentologi - Transport Dan Pengendapan Sedimen Silisiklastik PDFIndah LestariNoch keine Bewertungen
- Ucsp Collage MakingDokument2 SeitenUcsp Collage MakingDiona MacasaquitNoch keine Bewertungen
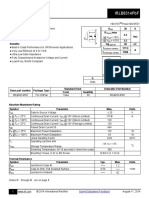
- Irlb8314Pbf: Application V 30 V R Max 2.4 M 3.2 QG 40 NC I 171 A I 130ADokument8 SeitenIrlb8314Pbf: Application V 30 V R Max 2.4 M 3.2 QG 40 NC I 171 A I 130AJosè Miguel López RodriguezNoch keine Bewertungen
- Listening TestDokument3 SeitenListening TestNatalia García GarcíaNoch keine Bewertungen