Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- AN4105 Power Switching ICDokument23 SeitenAN4105 Power Switching ICatomo33100% (1)
- AN-4102: Colour TV Receiver SMPSDokument16 SeitenAN-4102: Colour TV Receiver SMPSshri.bhairavkar6977Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- AN4102 (Uso 3S0680RF)Dokument20 SeitenAN4102 (Uso 3S0680RF)Cintya CardozoNoch keine Bewertungen
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsVon EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsBewertung: 3 von 5 Sternen3/5 (2)
- Data Sheet: Greenchip Smps Control IcDokument20 SeitenData Sheet: Greenchip Smps Control IcMiloud ChouguiNoch keine Bewertungen
- Analog Circuit Design Volume Three: Design Note CollectionVon EverandAnalog Circuit Design Volume Three: Design Note CollectionBewertung: 3 von 5 Sternen3/5 (2)
- Application Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Dokument16 SeitenApplication Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Malanie Sriya De SilvaNoch keine Bewertungen
- Project Report Speed Control of Induction MotorDokument47 SeitenProject Report Speed Control of Induction Motorsrajaprojects0% (1)
- KA3525 IC UpdatedDokument10 SeitenKA3525 IC UpdatedKarthik DmNoch keine Bewertungen
- Implementation of PSR in Flyback ConvertersDokument9 SeitenImplementation of PSR in Flyback ConvertersNehaoua FaresNoch keine Bewertungen
- An 6026Dokument23 SeitenAn 6026Иван АлексиевNoch keine Bewertungen
- Linkcv Family DatasheetDokument18 SeitenLinkcv Family DatasheetaisanasNoch keine Bewertungen
- PWM Motor Speed Controller and DC Light Dimmer Circuit GuideDokument16 SeitenPWM Motor Speed Controller and DC Light Dimmer Circuit GuideRICHIHOTS2100% (2)
- LM25005 42V, 2.5A Step-Down Switching Regulator: Literature Number: SNVS411BDokument24 SeitenLM25005 42V, 2.5A Step-Down Switching Regulator: Literature Number: SNVS411BPravin MevadaNoch keine Bewertungen
- SG3525 PWM Controller Circuit Diagram Explains Push-Pull ConverterDokument7 SeitenSG3525 PWM Controller Circuit Diagram Explains Push-Pull ConverterjaigodaraNoch keine Bewertungen
- And8328 DDokument8 SeitenAnd8328 DJonatan LunaNoch keine Bewertungen
- Design Guideline For Flyback Charger Using FAN302HL/ULDokument20 SeitenDesign Guideline For Flyback Charger Using FAN302HL/ULteomondoNoch keine Bewertungen
- LNK605 DatasheetDokument18 SeitenLNK605 DatasheetdgujarathiNoch keine Bewertungen
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Dokument16 SeitenApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNoch keine Bewertungen
- 90W Smps For Monitors With Constant Power Limiting Function: AN1133 Application NoteDokument11 Seiten90W Smps For Monitors With Constant Power Limiting Function: AN1133 Application NoteMadein ChinaNoch keine Bewertungen
- SW - Buck - 1 Application Report: Topology: Non Synchronous Buck Converter Controller: Texas Instruments TPS40200Dokument25 SeitenSW - Buck - 1 Application Report: Topology: Non Synchronous Buck Converter Controller: Texas Instruments TPS40200Ion AvramNoch keine Bewertungen
- 3 High Power SG3525 Pure Sinewave Inverter Circuits - Homemade Circuit ProjectsDokument20 Seiten3 High Power SG3525 Pure Sinewave Inverter Circuits - Homemade Circuit ProjectsANKUR RATHINoch keine Bewertungen
- Ultra-Fast Acting Electronic Circuit BreakerDokument55 SeitenUltra-Fast Acting Electronic Circuit Breakerpandi60% (5)
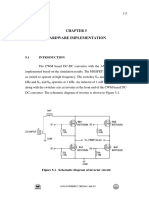
- Hardware Implementation: A1 A2 b1 b2Dokument19 SeitenHardware Implementation: A1 A2 b1 b2Santhosh KumarNoch keine Bewertungen
- Feature General Description: HT7A6005 Low Power, Wide Temperature Range General Purpose Current Mode PWM ControllerDokument11 SeitenFeature General Description: HT7A6005 Low Power, Wide Temperature Range General Purpose Current Mode PWM ControllerEnéas BaroneNoch keine Bewertungen
- PWM ControllerDokument20 SeitenPWM ControllerAmrit203Noch keine Bewertungen
- Viper22a Equivalent PDFDokument16 SeitenViper22a Equivalent PDFXande Nane Silveira0% (1)
- Pure Sine Invereter InfoDokument107 SeitenPure Sine Invereter Infoolawale gbadeboNoch keine Bewertungen
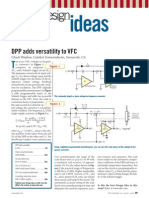
- Voltage To Frequency ConverterDokument7 SeitenVoltage To Frequency ConverterRodfer SorianoNoch keine Bewertungen
- A Buck-or-Boost Converter Module With Embedded Inductor and Fast Current LimitDokument10 SeitenA Buck-or-Boost Converter Module With Embedded Inductor and Fast Current LimitVeeraiah BodduNoch keine Bewertungen
- PV SolarDokument10 SeitenPV SolarpedroNoch keine Bewertungen
- Self Oscillating Class-D Audio Amplifier Circuit DesignDokument29 SeitenSelf Oscillating Class-D Audio Amplifier Circuit DesignnicchioNoch keine Bewertungen
- EDN Design Ideas 2007Dokument146 SeitenEDN Design Ideas 2007chag1956100% (2)
- An 4102 PDFDokument16 SeitenAn 4102 PDFOmprakash DagarNoch keine Bewertungen
- Iraudamp1 PDFDokument22 SeitenIraudamp1 PDFamijoski6051Noch keine Bewertungen
- PWM Fan ControllerDokument5 SeitenPWM Fan ControlleranandNoch keine Bewertungen
- An 18Dokument12 SeitenAn 18teomondoNoch keine Bewertungen
- Very Wide Input Voltage Range-Flyback (90V To 600V AC)Dokument12 SeitenVery Wide Input Voltage Range-Flyback (90V To 600V AC)senkum812002Noch keine Bewertungen
- How To Design A Regulated Power SupplyDokument12 SeitenHow To Design A Regulated Power SupplyDharam YadavNoch keine Bewertungen
- Uba 2071Dokument35 SeitenUba 2071Floricica Victor VasileNoch keine Bewertungen
- Sliding Mode Control of SMPS: Ms. A. Jonisha, Mrs. V. Devi MaheswaranDokument11 SeitenSliding Mode Control of SMPS: Ms. A. Jonisha, Mrs. V. Devi MaheswaranInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Control IC for switched-mode power supplies using MOS transistors (TDA 4605-2Dokument20 SeitenControl IC for switched-mode power supplies using MOS transistors (TDA 4605-2foxx034Noch keine Bewertungen
- ALPHA 10/10P SERVICE MANUALDokument19 SeitenALPHA 10/10P SERVICE MANUAL王宗超Noch keine Bewertungen
- Application Note 69 September 1996 Lt1575 Ultrafast Linear Controller Makes Fast Transient Response Power SuppliesDokument12 SeitenApplication Note 69 September 1996 Lt1575 Ultrafast Linear Controller Makes Fast Transient Response Power SuppliesHahdNoch keine Bewertungen
- LNK419Dokument20 SeitenLNK419leechulmiuNoch keine Bewertungen
- PWM-QR Ic: Control IC For Switched-Mode Power Supplies Using MOS-TransistorsDokument24 SeitenPWM-QR Ic: Control IC For Switched-Mode Power Supplies Using MOS-TransistorsCarlos ArturoNoch keine Bewertungen
- High Power High Efficiency Buck Converter Circuit Using TL494Dokument15 SeitenHigh Power High Efficiency Buck Converter Circuit Using TL494Koushik Maity100% (1)
- Ncl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsDokument10 SeitenNcl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsKhúc Hành QuânNoch keine Bewertungen
- 6 D548 D 01Dokument10 Seiten6 D548 D 01Mehadi Alom ChoudhuryNoch keine Bewertungen
- An 8027Dokument17 SeitenAn 8027arielguerreroNoch keine Bewertungen
- UC2842 Philips AN1272 PDFDokument7 SeitenUC2842 Philips AN1272 PDFupali01Noch keine Bewertungen
- 5.LDR Based Highways Road Light Failed Intimation Using GSMDokument44 Seiten5.LDR Based Highways Road Light Failed Intimation Using GSMfotronichs velloreNoch keine Bewertungen
- 19 Current ControlDokument5 Seiten19 Current ControlZeshan LatifNoch keine Bewertungen
- Multifunction Power Supply For Embedded SystemDokument16 SeitenMultifunction Power Supply For Embedded SystemPrabhat PatelNoch keine Bewertungen
- UC3842 current mode controller application noteDokument7 SeitenUC3842 current mode controller application noteCui BapNoch keine Bewertungen
- FT8260 1x AN Rev0.81Dokument15 SeitenFT8260 1x AN Rev0.81Enéas BaroneNoch keine Bewertungen
- TA7230PDokument4 SeitenTA7230PFady HachemNoch keine Bewertungen
- AN954Dokument14 SeitenAN954Fady HachemNoch keine Bewertungen
- Androgen DeprivationDokument8 SeitenAndrogen DeprivationFady HachemNoch keine Bewertungen
- Antimicrobial-Prophylaxis Cirugia UrologicaDokument48 SeitenAntimicrobial-Prophylaxis Cirugia UrologicaCarlos Troya AltamiranoNoch keine Bewertungen
- BD438Dokument5 SeitenBD438Fady HachemNoch keine Bewertungen
- DC DC Converter BOMDokument1 SeiteDC DC Converter BOMFady HachemNoch keine Bewertungen
- Offline FullbridgeDokument1 SeiteOffline FullbridgeFady HachemNoch keine Bewertungen
- HAKKO 936 - Schematic: Rendered By: Tom Hammond - NØSS 26 MAR 2011 v1.7Dokument6 SeitenHAKKO 936 - Schematic: Rendered By: Tom Hammond - NØSS 26 MAR 2011 v1.7Gak TahuNoch keine Bewertungen
- Tda7294 PDFDokument16 SeitenTda7294 PDFRoger NunesNoch keine Bewertungen
- Actr 433Dokument3 SeitenActr 433Fady HachemNoch keine Bewertungen
- BD438Dokument5 SeitenBD438Fady HachemNoch keine Bewertungen
- Sg3525a-D Sg3525a-D Sg3525a-D Sg3525a-DDokument10 SeitenSg3525a-D Sg3525a-D Sg3525a-D Sg3525a-Dcatalin9494Noch keine Bewertungen
- MC34063 STmicroDokument23 SeitenMC34063 STmicroFady HachemNoch keine Bewertungen
- DD48 E108 D 01Dokument1 SeiteDD48 E108 D 01Fady HachemNoch keine Bewertungen
- MC 34063 ADokument23 SeitenMC 34063 AFady HachemNoch keine Bewertungen
- Core winding data for 535.9μH inductorDokument1 SeiteCore winding data for 535.9μH inductorFady HachemNoch keine Bewertungen
- An920 DDokument40 SeitenAn920 DFady HachemNoch keine Bewertungen
- 2N60 PDFDokument7 Seiten2N60 PDFFady HachemNoch keine Bewertungen
- Core winding data for 535.9μH inductorDokument1 SeiteCore winding data for 535.9μH inductorFady HachemNoch keine Bewertungen
- Application Note AN4105Dokument23 SeitenApplication Note AN4105Fady HachemNoch keine Bewertungen
- Byv52 200Dokument7 SeitenByv52 200Fady HachemNoch keine Bewertungen
- Fly Back ConverterDokument1 SeiteFly Back ConverterFady HachemNoch keine Bewertungen
- 2N5401 D PDFDokument5 Seiten2N5401 D PDFFady HachemNoch keine Bewertungen
- NE555 Timer Circuit with LED Blink Rate ControlDokument1 SeiteNE555 Timer Circuit with LED Blink Rate ControlFady HachemNoch keine Bewertungen
- Offline FullbridgeDokument1 SeiteOffline FullbridgeFady HachemNoch keine Bewertungen
- Smps Simétrica Com Etd49Dokument1 SeiteSmps Simétrica Com Etd49Lourival da SilvaNoch keine Bewertungen
- Smps v2.1 SCHDokument1 SeiteSmps v2.1 SCHFady Hachem0% (1)
- Smps v2.1 PCBDokument1 SeiteSmps v2.1 PCBFady HachemNoch keine Bewertungen
- Switch mode power supply circuitDokument1 SeiteSwitch mode power supply circuitFady HachemNoch keine Bewertungen
- D600 A16Dokument9 SeitenD600 A16Pelroy StrongarmNoch keine Bewertungen
- Code Samples Exploring Data Types, Arrays, and Loops in SystemVerilogDokument2 SeitenCode Samples Exploring Data Types, Arrays, and Loops in SystemVerilogMohammed Nawaz ShaikNoch keine Bewertungen
- (New) Adjustable Voltage Power Supply 55 V - 20A High Power and Current - Automatic Fan On - OffDokument1 Seite(New) Adjustable Voltage Power Supply 55 V - 20A High Power and Current - Automatic Fan On - OffSek PyroNoch keine Bewertungen
- Capacity Planning For MongoDBDokument36 SeitenCapacity Planning For MongoDBAlvin John RichardsNoch keine Bewertungen
- Object-Oriented Programming C++ Exam QuestionsDokument3 SeitenObject-Oriented Programming C++ Exam QuestionsRabison ChitrakarNoch keine Bewertungen
- Axiohm NCR Thermal Receipt Printer A794 Owners GuideDokument146 SeitenAxiohm NCR Thermal Receipt Printer A794 Owners GuidetangocharliepdxNoch keine Bewertungen
- C LanguageDokument15 SeitenC LanguageBella Caireena CedavaNoch keine Bewertungen
- SF DumpDokument14 SeitenSF DumpFelipe XochihuaNoch keine Bewertungen
- Logcat Prev CSC LogDokument129 SeitenLogcat Prev CSC LogDaniels Emial ZarimarNoch keine Bewertungen
- Experiment 10: Implementation of Income Tax/loan EMI Calculator and Deploy The Same On Real DevicesDokument9 SeitenExperiment 10: Implementation of Income Tax/loan EMI Calculator and Deploy The Same On Real DevicesSHUBHANKAR KANOJE100% (1)
- Web Development Internship ReportDokument16 SeitenWeb Development Internship Reportnivedita raiNoch keine Bewertungen
- VTP Process Photodiodes Spec SheetDokument1 SeiteVTP Process Photodiodes Spec SheetAlexNoch keine Bewertungen
- Implementing Line Codes in MATLABDokument11 SeitenImplementing Line Codes in MATLABRutik PanchalNoch keine Bewertungen
- LaptopDokument2 SeitenLaptopRidz WanNoch keine Bewertungen
- IEEE Recommended Practice For Microprocessor-Based Protection Equipment Firmware ControlDokument23 SeitenIEEE Recommended Practice For Microprocessor-Based Protection Equipment Firmware ControlJohn BihagNoch keine Bewertungen
- AdonetDokument605 SeitenAdoneteveraldocerqueiraNoch keine Bewertungen
- Nikhil JPGDokument2 SeitenNikhil JPGChalla nikhilNoch keine Bewertungen
- RSP 2014 Access Control CatalogDokument65 SeitenRSP 2014 Access Control CatalogAlfred PskNoch keine Bewertungen
- Dip Lab Short Code-1Dokument7 SeitenDip Lab Short Code-1SANIYYA AAFREENNoch keine Bewertungen
- 5 Step by Step Instructions To Run First Basic Selenium ProgramDokument5 Seiten5 Step by Step Instructions To Run First Basic Selenium ProgramamaleshraviNoch keine Bewertungen
- Service Manual: ContentsDokument153 SeitenService Manual: Contentsagie limNoch keine Bewertungen
- Cisco MDS Zoning StepsDokument4 SeitenCisco MDS Zoning StepsRashid Nihal100% (1)
- Aqualogic BPM Process Api: Developer GuideDokument26 SeitenAqualogic BPM Process Api: Developer GuideCelso MartinsNoch keine Bewertungen
- TraceDokument48 SeitenTraceShrikant ChaudhariNoch keine Bewertungen
- Lec02 ASADokument21 SeitenLec02 ASALittle BroNoch keine Bewertungen
- Hikvision IVMS 4200 PC User ManualDokument291 SeitenHikvision IVMS 4200 PC User ManualMaxim 10Noch keine Bewertungen
- Adobe Acrobat DC SDK Release Notes: Edition 1.0Dokument4 SeitenAdobe Acrobat DC SDK Release Notes: Edition 1.0InquisitiveNoch keine Bewertungen
- Opamp TesterDokument2 SeitenOpamp TesterbalubobbyNoch keine Bewertungen
- DNS SECURES THE ABC'SDokument31 SeitenDNS SECURES THE ABC'SMgciniNcubeNoch keine Bewertungen
- Ssc-Je-Electronic-Devices Electrical EngineeringDokument13 SeitenSsc-Je-Electronic-Devices Electrical EngineeringPeerzada WahidNoch keine Bewertungen
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (54)
- AI Money Machine: Unlock the Secrets to Making Money Online with AIVon EverandAI Money Machine: Unlock the Secrets to Making Money Online with AINoch keine Bewertungen
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityVon EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityBewertung: 5 von 5 Sternen5/5 (1)
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- So You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenVon EverandSo You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenBewertung: 4.5 von 5 Sternen4.5/5 (35)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (227)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessVon EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNoch keine Bewertungen
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideVon EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideBewertung: 5 von 5 Sternen5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandVon Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandBewertung: 3.5 von 5 Sternen3.5/5 (10)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldVon EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (107)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewVon EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (104)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesVon EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesBewertung: 4.5 von 5 Sternen4.5/5 (12)
- 97 Principles for Software Architects: Axioms for software architecture and development written by industry practitionersVon Everand97 Principles for Software Architects: Axioms for software architecture and development written by industry practitionersBewertung: 5 von 5 Sternen5/5 (21)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseVon EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseBewertung: 3.5 von 5 Sternen3.5/5 (12)
- Artificial Intelligence: A Guide for Thinking HumansVon EverandArtificial Intelligence: A Guide for Thinking HumansBewertung: 4.5 von 5 Sternen4.5/5 (30)
- Clean Architecture: A Craftsman's Guide to Software Structure and DesignVon EverandClean Architecture: A Craftsman's Guide to Software Structure and DesignBewertung: 5 von 5 Sternen5/5 (8)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Von EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Noch keine Bewertungen
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryVon EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNoch keine Bewertungen
- How to Do Nothing: Resisting the Attention EconomyVon EverandHow to Do Nothing: Resisting the Attention EconomyBewertung: 4 von 5 Sternen4/5 (421)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Von EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Bewertung: 5 von 5 Sternen5/5 (34)