Das könnte Ihnen auch gefallen
- Carta de RecomendacionDokument3 SeitenCarta de RecomendacionLiliana Marcial GonzálezNoch keine Bewertungen
- Documento Fin de Curso Zona 141Dokument1 SeiteDocumento Fin de Curso Zona 141Liliana Marcial GonzálezNoch keine Bewertungen
- CNCDokument5 SeitenCNCLiliana Marcial GonzálezNoch keine Bewertungen
- Tornillos de Potencia.1Dokument8 SeitenTornillos de Potencia.1Liliana Marcial González100% (2)
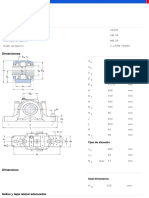
- Soportes de Pie de Dos Piezas Series SNL y SE para Rodamientos Montados Sobre Un Asiento Cilíndrico Con Sellos Estándares-SNL 528 + 22228Dokument2 SeitenSoportes de Pie de Dos Piezas Series SNL y SE para Rodamientos Montados Sobre Un Asiento Cilíndrico Con Sellos Estándares-SNL 528 + 22228Bernardo RCNoch keine Bewertungen
- Muros Portantes y VoladizosDokument39 SeitenMuros Portantes y VoladizosHarold Lastarria Salazar0% (1)
- Clasificaciones GeomecanicaDokument20 SeitenClasificaciones GeomecanicaninoronaldNoch keine Bewertungen
- Estructuras y Mecanismos 2esoDokument18 SeitenEstructuras y Mecanismos 2esoieselpomar100% (1)
- Módulo de Rigidez de La CarpetaDokument4 SeitenMódulo de Rigidez de La CarpetaEdgar Eduardo Dominguez Dominguez100% (1)
- Diseno de Estribo Con ContrafuerteDokument10 SeitenDiseno de Estribo Con ContrafuertehansNoch keine Bewertungen
- Designaciones SKFDokument48 SeitenDesignaciones SKFEudy Gimenez100% (6)
- Ingenieria de Lubricantes.Dokument42 SeitenIngenieria de Lubricantes.MMatute FD0% (1)
- Carparks - Es Sistema de Estacionamientos HumyDokument32 SeitenCarparks - Es Sistema de Estacionamientos HumyRicardo Abdiel Toulier PeraltaNoch keine Bewertungen
- EJERCIOSDokument6 SeitenEJERCIOSWilson marrugo hernandezNoch keine Bewertungen
- Itintec 331.018Dokument10 SeitenItintec 331.018eduardodeqoNoch keine Bewertungen
- GranulometríaDokument5 SeitenGranulometríaCristian Liñan OroscoNoch keine Bewertungen
- Polietileno de Ultra Alto Peso MolecularDokument10 SeitenPolietileno de Ultra Alto Peso Molecularfrida077Noch keine Bewertungen
- Tema Cimentaciones Superficiales y ProfundasDokument121 SeitenTema Cimentaciones Superficiales y ProfundasCesar Lfpc87% (15)
- Completacion de PozosDokument37 SeitenCompletacion de PozosMarianna VezzaNoch keine Bewertungen
- Tabla de Recomendacion de Sostenimeinto Por Tipo de Roca y Tipo de LaborDokument4 SeitenTabla de Recomendacion de Sostenimeinto Por Tipo de Roca y Tipo de LaborDARIONoch keine Bewertungen
- Identificación de Las 10 Fallas RodamientosDokument13 SeitenIdentificación de Las 10 Fallas Rodamientosenfermo100% (3)
- Proceso de forja: clasificación, métodos y defectosDokument24 SeitenProceso de forja: clasificación, métodos y defectosJhoseph Rafael Paucar PradoNoch keine Bewertungen
- Levantamiento Geotecnico de Los Macizos RocososDokument142 SeitenLevantamiento Geotecnico de Los Macizos RocososLes BleusNoch keine Bewertungen
- Cambios de estado práctica dirigidaDokument2 SeitenCambios de estado práctica dirigidaAlberto Juarez100% (4)
- Ejemplos PermeabilidadDokument5 SeitenEjemplos PermeabilidadJuan Jose Manrique AceroNoch keine Bewertungen
- Formato Informe SondasDokument1 SeiteFormato Informe SondasMatias Ulloa SaavedraNoch keine Bewertungen
- DERRUMBESDokument1 SeiteDERRUMBESLucano MárquezNoch keine Bewertungen
- Cap 22 Aci Resistencia de Las Secciones de Los MiembrosDokument4 SeitenCap 22 Aci Resistencia de Las Secciones de Los MiembrosprisNoch keine Bewertungen
- pfc5415 PDFDokument227 Seitenpfc5415 PDFJoel MooreNoch keine Bewertungen
- 14 LuzDokument20 Seiten14 Luznanashs100% (3)
- Diseño Por CorteDokument9 SeitenDiseño Por CorteVictor Ramos GonzalesNoch keine Bewertungen
- CharpyDokument8 SeitenCharpyMilton HuamanchoqueNoch keine Bewertungen
- Tanque Elevado 10 m3Dokument51 SeitenTanque Elevado 10 m3Raul Ivan Krtagena Pinedo100% (2)
- Influencia. La psicología de la persuasiónVon EverandInfluencia. La psicología de la persuasiónBewertung: 4.5 von 5 Sternen4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoVon Everand7 tendencias digitales que cambiarán el mundoBewertung: 4.5 von 5 Sternen4.5/5 (86)
- El trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoVon EverandEl trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoBewertung: 4 von 5 Sternen4/5 (30)
- Auditoría de seguridad informática: Curso prácticoVon EverandAuditoría de seguridad informática: Curso prácticoBewertung: 5 von 5 Sternen5/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaVon EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaBewertung: 4.5 von 5 Sternen4.5/5 (116)
- Investigación de operaciones: Conceptos fundamentalesVon EverandInvestigación de operaciones: Conceptos fundamentalesBewertung: 4.5 von 5 Sternen4.5/5 (2)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosVon Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosBewertung: 5 von 5 Sternen5/5 (1)
- Excel 2021 y 365 Paso a Paso: Paso a PasoVon EverandExcel 2021 y 365 Paso a Paso: Paso a PasoBewertung: 5 von 5 Sternen5/5 (12)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másVon EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másBewertung: 2.5 von 5 Sternen2.5/5 (3)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaVon EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaBewertung: 5 von 5 Sternen5/5 (1)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Von EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Bewertung: 5 von 5 Sternen5/5 (4)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroVon EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroBewertung: 4 von 5 Sternen4/5 (1)
- Reparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DVon EverandReparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DBewertung: 5 von 5 Sternen5/5 (6)