Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- CV - Ahmed Alnashaba Nov 2018Dokument1 SeiteCV - Ahmed Alnashaba Nov 2018AhmedNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Altistart 01 - ATS01N209QNDokument6 SeitenAltistart 01 - ATS01N209QNkarimNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- MC34151 DDokument12 SeitenMC34151 DMladen MuskinjaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- EE114S: Fundamentals of Analog Integrated Circuit DesignDokument6 SeitenEE114S: Fundamentals of Analog Integrated Circuit DesignPham Viet ThanhNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- S Monthly Report On The Working of FM Transmitters at TV Tower Pitampura, Delhi For The Month of June 2013Dokument7 SeitenS Monthly Report On The Working of FM Transmitters at TV Tower Pitampura, Delhi For The Month of June 2013ViJaY HaLdErNoch keine Bewertungen
- KDS 7X ManualDokument26 SeitenKDS 7X ManualDutchstylerNoch keine Bewertungen
- Signal Jammer Project ReportDokument10 SeitenSignal Jammer Project ReportAbeer Khan50% (2)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Pee BuddyDokument23 SeitenPee BuddyDivyam BhadoriaNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Network Analysis-Measurement Science Poster 2018 2Dokument1 SeiteNetwork Analysis-Measurement Science Poster 2018 2joaomsonNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Wave Shaping CircuitsDokument20 SeitenWave Shaping Circuitskibrom atsbha100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- L42 ECEN5817 NotesDokument17 SeitenL42 ECEN5817 NotesMuhammad Uzair BilalNoch keine Bewertungen
- Rear View Safety Backup Camera System InstructionsDokument21 SeitenRear View Safety Backup Camera System InstructionsjoestephNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Specification Sheet - HKTS 210 (English EU)Dokument2 SeitenSpecification Sheet - HKTS 210 (English EU)netguru2010Noch keine Bewertungen
- GP328&338 BrochureDokument2 SeitenGP328&338 Brochurestanpjames2309Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- SB6000TL 21 Den1420wDokument2 SeitenSB6000TL 21 Den1420wEliana CostaNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- GSM-EDGE Repeater Manual Preliminary Version 2Dokument265 SeitenGSM-EDGE Repeater Manual Preliminary Version 2divxns100% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
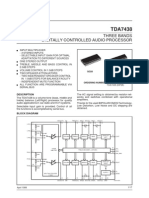
- Tda 7438Dokument18 SeitenTda 7438sontuyet82Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Static Var CompensatorDokument6 SeitenStatic Var Compensatoralexandre_foxtrotNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- DATA LINK To Right RadioDokument3 SeitenDATA LINK To Right RadioHadi MuradNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Analog & Digital VLSI Design Practice QuestionsDokument24 SeitenAnalog & Digital VLSI Design Practice QuestionsAbhinav MishraNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- 45TLF2 PDFDokument68 Seiten45TLF2 PDFMohamed KamalNoch keine Bewertungen
- Large Scale Interconnects Wide Area Network Wan3488Dokument46 SeitenLarge Scale Interconnects Wide Area Network Wan3488Zaenal MubaroqNoch keine Bewertungen
- Avidyne Retail Price List: Effective March, 2011Dokument2 SeitenAvidyne Retail Price List: Effective March, 2011appanna_Noch keine Bewertungen
- Hkts 30: The Harman Kardon Hkts 30 Key Specifi CationsDokument2 SeitenHkts 30: The Harman Kardon Hkts 30 Key Specifi Cationsabhilash banNoch keine Bewertungen
- Tda 8780Dokument16 SeitenTda 8780Andrey DolgovNoch keine Bewertungen
- Project EEE202 G8Dokument28 SeitenProject EEE202 G8mehedi61Noch keine Bewertungen
- Tap Tempo Lfo (Taplfo v2)Dokument3 SeitenTap Tempo Lfo (Taplfo v2)withstringsNoch keine Bewertungen
- Chapter 1Dokument55 SeitenChapter 1vijaykannamallaNoch keine Bewertungen
- Element 9Dokument51 SeitenElement 9Xars JaimesNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)