Das könnte Ihnen auch gefallen
- Crius AIOP Manual MWC Part1Dokument1 SeiteCrius AIOP Manual MWC Part1gallinap1Noch keine Bewertungen
- (EN) MG32F02A128 064 DataSheet V1.20Dokument111 Seiten(EN) MG32F02A128 064 DataSheet V1.20Super ManNoch keine Bewertungen
- KyoPal X7083-X7043-X7023Dokument70 SeitenKyoPal X7083-X7043-X7023kristechnikNoch keine Bewertungen
- Pic10 (L) F320/322Dokument192 SeitenPic10 (L) F320/322Carlo EspinozaNoch keine Bewertungen
- Component Details Raspberry Pi 3Dokument7 SeitenComponent Details Raspberry Pi 3aartijadhav497377Noch keine Bewertungen
- dsPicFJ16 32GP MC10xDokument386 SeitendsPicFJ16 32GP MC10xCh SamirNoch keine Bewertungen
- lh79524 525 N DatasheetDokument62 Seitenlh79524 525 N Datasheetapi-226948648Noch keine Bewertungen
- Embeddded Pic 18f Starter KitDokument3 SeitenEmbeddded Pic 18f Starter KitEmblitz Rajajinagar100% (1)
- MB90F337Dokument85 SeitenMB90F337Bin WangNoch keine Bewertungen
- Bus Tracking SystemDokument19 SeitenBus Tracking SystemErole Technologies Pvt ltd Homemade EngineerNoch keine Bewertungen
- Manual MasterK120SDokument32 SeitenManual MasterK120SzorcarNoch keine Bewertungen
- 16F877ADokument234 Seiten16F877AMarius PauletNoch keine Bewertungen
- Xpo PLCDokument2 SeitenXpo PLCSamastha Nair SamajamNoch keine Bewertungen
- InteliDrive Mobile - Datasheet PDFDokument2 SeitenInteliDrive Mobile - Datasheet PDFdeeparunNoch keine Bewertungen
- Atmega 32 U 4Dokument26 SeitenAtmega 32 U 4Bruno PalašekNoch keine Bewertungen
- Atmega 32 U 4Dokument433 SeitenAtmega 32 U 4hummbumNoch keine Bewertungen
- C Capo MB89P568-101Dokument60 SeitenC Capo MB89P568-101Nicolas SixNoch keine Bewertungen
- Autonomous Sensor and Control Platform Rover: Tae Lee Josh Reitsema Scott Zhong Mike Chao Mark WinterDokument30 SeitenAutonomous Sensor and Control Platform Rover: Tae Lee Josh Reitsema Scott Zhong Mike Chao Mark WinterJosue GarciaNoch keine Bewertungen
- Arduino - Arduino LeonardoDokument26 SeitenArduino - Arduino LeonardoBlanca HarperNoch keine Bewertungen
- PIC16C6X: 8-Bit CMOS MicrocontrollersDokument0 SeitenPIC16C6X: 8-Bit CMOS MicrocontrollersChen CYNoch keine Bewertungen
- EP - Unit - V - Real World Interfacing With Cortex M4 Based MicrocontrollerDokument114 SeitenEP - Unit - V - Real World Interfacing With Cortex M4 Based Microcontrollerganesh SawantNoch keine Bewertungen
- 20 Pagini - 16F877.UnlockedDokument13 Seiten20 Pagini - 16F877.UnlockedMariusNastaseNoch keine Bewertungen
- PLC GeneralDokument46 SeitenPLC GeneralastranegroNoch keine Bewertungen
- PIC16C7X: 8-Bit CMOS Microcontrollers With A/D ConverterDokument34 SeitenPIC16C7X: 8-Bit CMOS Microcontrollers With A/D ConvertersureshNoch keine Bewertungen
- Pic16f1787 DatasheetDokument464 SeitenPic16f1787 Datasheetjose castilloNoch keine Bewertungen
- PIC16F18855 ModDokument662 SeitenPIC16F18855 Modwhynot05Noch keine Bewertungen
- Modul Mikrokontroler 06 Pengenalan TimerDokument15 SeitenModul Mikrokontroler 06 Pengenalan Timerrei_za931875Noch keine Bewertungen
- Nexgenie Product BasketDokument16 SeitenNexgenie Product BasketSonuOm0% (1)
- PIC12F1571Dokument334 SeitenPIC12F1571Anonymous 3GwpCKNoch keine Bewertungen
- WPC 8769 LDGDokument5 SeitenWPC 8769 LDGOsman EfendiNoch keine Bewertungen
- CY8 C95 X 0 ADokument32 SeitenCY8 C95 X 0 AAnonymous 60esBJZIj100% (1)
- LC863224ADokument21 SeitenLC863224AJose SintuNoch keine Bewertungen
- 02 Mechatronics & Automation Products PDFDokument58 Seiten02 Mechatronics & Automation Products PDFShueab MujawarNoch keine Bewertungen
- Embedded ARM Starter KitDokument3 SeitenEmbedded ARM Starter KitEmblitz Rajajinagar100% (2)
- ATmega 1284 PDokument13 SeitenATmega 1284 PWasang Juwi PracihnoNoch keine Bewertungen
- MB 91305Dokument90 SeitenMB 91305Bin WangNoch keine Bewertungen
- FP0 FP1 FP-M (C16T) FP-M (C20R/C20T/C32T) : p007-017 01.11.28 3:32 PM Page 11Dokument17 SeitenFP0 FP1 FP-M (C16T) FP-M (C20R/C20T/C32T) : p007-017 01.11.28 3:32 PM Page 11cahesNoch keine Bewertungen
- LS21W Service ManualDokument41 SeitenLS21W Service ManualaldoNoch keine Bewertungen
- Ejemplo Diseño Y Simulación de Comparador de 1 Bit Usando Quartus IiDokument17 SeitenEjemplo Diseño Y Simulación de Comparador de 1 Bit Usando Quartus IileoNoch keine Bewertungen
- 8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32ADokument18 Seiten8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32Amiusuario_1022Noch keine Bewertungen
- MG82F6D17 Datasheet: 8051-Based MCUDokument307 SeitenMG82F6D17 Datasheet: 8051-Based MCUAnil GayakwadNoch keine Bewertungen
- ATmega32 SummaryDokument18 SeitenATmega32 SummaryRajesh KumarNoch keine Bewertungen
- TrustPLC KataloogDokument38 SeitenTrustPLC KataloogNtscJNoch keine Bewertungen
- Identitas BarangDokument42 SeitenIdentitas BarangdikatokNoch keine Bewertungen
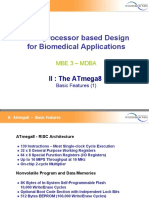
- Microprocessor Based Design For Biomedical Applications: Ii: The Atmega8Dokument50 SeitenMicroprocessor Based Design For Biomedical Applications: Ii: The Atmega8himanshuNoch keine Bewertungen
- Microprocessor Based Design For Biomedical Applications: Ii: The Atmega8Dokument50 SeitenMicroprocessor Based Design For Biomedical Applications: Ii: The Atmega8Kanishk SilverFuryNoch keine Bewertungen
- At91sam7s64 DsDokument491 SeitenAt91sam7s64 DsLord_JoelNoch keine Bewertungen
- PIC-P67J60 Development Board Users Manual: Rev. C, December 2009Dokument18 SeitenPIC-P67J60 Development Board Users Manual: Rev. C, December 2009Jaime Alberto Bolaños Eraso100% (2)
- Gps SkyTraq - Man2Dokument13 SeitenGps SkyTraq - Man2Anandan Durai100% (1)
- ATmega16 PDFDokument359 SeitenATmega16 PDFAndre PdNoch keine Bewertungen
- Spy RobotDokument74 SeitenSpy Robotjanakiram473Noch keine Bewertungen
- Exploring Arduino: Tools and Techniques for Engineering WizardryVon EverandExploring Arduino: Tools and Techniques for Engineering WizardryBewertung: 4.5 von 5 Sternen4.5/5 (5)
- Microprocessor Architectures and Systems: RISC, CISC and DSPVon EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPBewertung: 4 von 5 Sternen4/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionVon Everand8051 Microcontroller: An Applications Based IntroductionBewertung: 5 von 5 Sternen5/5 (6)
- Microprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureVon EverandMicroprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureBewertung: 1 von 5 Sternen1/5 (1)
- ARM Microcontrollers Programming for Embedded SystemsVon EverandARM Microcontrollers Programming for Embedded SystemsBewertung: 5 von 5 Sternen5/5 (1)
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Von EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Noch keine Bewertungen
- Process Making of Car VelgDokument12 SeitenProcess Making of Car VelgBastianAzharNoch keine Bewertungen
- WilC FinalDokument4 SeitenWilC FinalBastianAzharNoch keine Bewertungen
- PP01 Kel.8Dokument1 SeitePP01 Kel.8BastianAzharNoch keine Bewertungen
- VelgDokument5 SeitenVelgBastianAzharNoch keine Bewertungen
- Computer VirusDokument18 SeitenComputer VirusDevesh DewanganNoch keine Bewertungen
- Multilizer PDF Translator Full Crack PDFDokument4 SeitenMultilizer PDF Translator Full Crack PDFChristian Barreto0% (3)
- Instructions Available Only in DIRECT ModeDokument40 SeitenInstructions Available Only in DIRECT ModeLisara BezariusNoch keine Bewertungen
- Introduction To Computer Programming PDFDokument4 SeitenIntroduction To Computer Programming PDFNoelMalle75% (4)
- Lookout Pegasus Technical AnalysisDokument35 SeitenLookout Pegasus Technical Analysisoh ohoNoch keine Bewertungen
- How To Join Windows Computer To Bunna DomainDokument8 SeitenHow To Join Windows Computer To Bunna DomainEphrem AlemuNoch keine Bewertungen
- Brochure-Professional Diploma in Digital Marketing PDFDokument31 SeitenBrochure-Professional Diploma in Digital Marketing PDFzavedNoch keine Bewertungen
- 2022-10-10Dokument10 Seiten2022-10-10Neo TruongNoch keine Bewertungen
- Covid 19 Telehealth Program RecipientsDokument21 SeitenCovid 19 Telehealth Program RecipientsEd Praetorian100% (1)
- Allu SwamyDokument4 SeitenAllu SwamyIT Jobs IndiaNoch keine Bewertungen
- SSC CHSL Previous Year Paper: WWW - Careerpower.inDokument21 SeitenSSC CHSL Previous Year Paper: WWW - Careerpower.inRahul SinghNoch keine Bewertungen
- Data Visualization Exploring and Explaining With Data 1St Edition Jeffrey D Camm Full ChapterDokument67 SeitenData Visualization Exploring and Explaining With Data 1St Edition Jeffrey D Camm Full Chapterbarbara.martich678100% (4)
- Vmware Workspace One Mobile Threat Defense Solution BriefDokument3 SeitenVmware Workspace One Mobile Threat Defense Solution BriefMilton Alvarez DiazNoch keine Bewertungen
- fqp0 BK Install Server Windows Oracle PDFDokument146 Seitenfqp0 BK Install Server Windows Oracle PDFinvis31Noch keine Bewertungen
- 16-2 p30 Mapping of j1939 To Can FD Cia602 ZeltwangerDokument2 Seiten16-2 p30 Mapping of j1939 To Can FD Cia602 ZeltwangerAlireza RakhshNoch keine Bewertungen
- AbsoluteDokument22 SeitenAbsolutejiang haoNoch keine Bewertungen
- Excel 2019 Manual 1660979397Dokument196 SeitenExcel 2019 Manual 1660979397Brick Storey100% (1)
- 10-CU30 Brochure With SpecsDokument4 Seiten10-CU30 Brochure With Specsagus widodoNoch keine Bewertungen
- Project XII GroupDokument8 SeitenProject XII Groupjunusuna644Noch keine Bewertungen
- Installing WebUtilDokument8 SeitenInstalling WebUtilSorin VelicuNoch keine Bewertungen
- WTC User Manual ENDokument47 SeitenWTC User Manual ENkonradNoch keine Bewertungen
- Google Interview QuestionsDokument7 SeitenGoogle Interview QuestionsAbhishek BansalNoch keine Bewertungen
- Manual Smart Robotic 300003099 E 2012 12 22Dokument164 SeitenManual Smart Robotic 300003099 E 2012 12 22JuanjoNoch keine Bewertungen
- Proposed Project Title: Synopsis of Book Store Diploma in Computer Engineering Submitted byDokument5 SeitenProposed Project Title: Synopsis of Book Store Diploma in Computer Engineering Submitted byharshNoch keine Bewertungen
- HSSC-I Computer Science (3rd Set)Dokument6 SeitenHSSC-I Computer Science (3rd Set)Kim ElianaNoch keine Bewertungen
- Benedict's Output For GenmathDokument7 SeitenBenedict's Output For GenmathJoanna CortesNoch keine Bewertungen
- Enhanced Dynamic Wedge Implementation GuideDokument166 SeitenEnhanced Dynamic Wedge Implementation GuideMIchaelNoch keine Bewertungen
- Final Quiz 1 3Dokument3 SeitenFinal Quiz 1 3Erick GarciaNoch keine Bewertungen
- JCL Tutorial - Ibm JCL Mainframe JCL Introduction Basics Examples Reference Study Material GuideDokument4 SeitenJCL Tutorial - Ibm JCL Mainframe JCL Introduction Basics Examples Reference Study Material GuideSaurabh ChoudharyNoch keine Bewertungen