Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- C1 (1 - Storey Roof Sheets)Dokument11 SeitenC1 (1 - Storey Roof Sheets)John Michael TalanNoch keine Bewertungen
- Top Secrets of The VedasDokument54 SeitenTop Secrets of The Vedasbiswajit_paulNoch keine Bewertungen
- Quality Assurance and ValidationDokument62 SeitenQuality Assurance and ValidationMacharia ZachariaNoch keine Bewertungen
- MAM100 User ManualDokument23 SeitenMAM100 User Manualsteve@air-innovations.co.za100% (5)
- Masters in Business Administration: Bhilai Steel Plant (Sail)Dokument62 SeitenMasters in Business Administration: Bhilai Steel Plant (Sail)संदीप द्विवेदीNoch keine Bewertungen
- Amine Gas Sweetening Systems PsDokument3 SeitenAmine Gas Sweetening Systems Pscanada_198020008918Noch keine Bewertungen
- Litio en Cauchari PDFDokument387 SeitenLitio en Cauchari PDFJoni Guanca100% (1)
- Biology PpaperDokument16 SeitenBiology PpaperPeter MkamaNoch keine Bewertungen
- Lesson 26: Reflection & Mirror Diagrams: The Law of ReflectionDokument11 SeitenLesson 26: Reflection & Mirror Diagrams: The Law of ReflectionPeter MkamaNoch keine Bewertungen
- Nexus FP PDFDokument48 SeitenNexus FP PDFPeter MkamaNoch keine Bewertungen
- Nabaki Afrika Trained Decra Installaion MtaalamsDokument1 SeiteNabaki Afrika Trained Decra Installaion MtaalamsPeter Mkama0% (1)
- Configuration Examples For IOS SLBDokument65 SeitenConfiguration Examples For IOS SLBPeter MkamaNoch keine Bewertungen
- Filter Processing Maswali2Dokument21 SeitenFilter Processing Maswali2Peter MkamaNoch keine Bewertungen
- General CatalogueDokument19 SeitenGeneral Cataloguedbristow21Noch keine Bewertungen
- BFE-FM200-EPFS-000-02 - System Datasheet (UL)Dokument52 SeitenBFE-FM200-EPFS-000-02 - System Datasheet (UL)SajjadNoch keine Bewertungen
- Jenbacher: 1. Ignition System: - 1Dokument2 SeitenJenbacher: 1. Ignition System: - 1ArîfNoch keine Bewertungen
- "Campus Placement" Has Been Always A Dream For Me in GraduationDokument3 Seiten"Campus Placement" Has Been Always A Dream For Me in GraduationvivekNoch keine Bewertungen
- What Is MEMS TechnologyDokument6 SeitenWhat Is MEMS TechnologyMAHDILEE100% (2)
- MC3361BPDokument5 SeitenMC3361BPtonymathew03Noch keine Bewertungen
- Installation Instructions USB v1.0.21Dokument3 SeitenInstallation Instructions USB v1.0.21Luis Alvaro MolinaNoch keine Bewertungen
- Important Questions Transmission Lines and WaveguidesDokument1 SeiteImportant Questions Transmission Lines and WaveguideskskumargieNoch keine Bewertungen
- Sae J3213-2023Dokument32 SeitenSae J3213-20237620383tlNoch keine Bewertungen
- Solar Sagm 12 205: Data SheetDokument2 SeitenSolar Sagm 12 205: Data Sheetsofia hernandezNoch keine Bewertungen
- Java - Android, FileOutputStream, ByteArrayInputStream, ByteArrayOutputStream.Dokument27 SeitenJava - Android, FileOutputStream, ByteArrayInputStream, ByteArrayOutputStream.Karan TrehanNoch keine Bewertungen
- Overall Heat Transfer CoefficientDokument4 SeitenOverall Heat Transfer Coefficientvenka07Noch keine Bewertungen
- Modern System Analysis and DesignDokument40 SeitenModern System Analysis and DesignJed DíazNoch keine Bewertungen
- BILL A: Extra Low VoltageDokument9 SeitenBILL A: Extra Low VoltagevijayxkumarNoch keine Bewertungen
- MCR 308 PDFDokument7 SeitenMCR 308 PDFstudiostandardNoch keine Bewertungen
- Beteq2010 Part 1Dokument198 SeitenBeteq2010 Part 1Zilmar JustiNoch keine Bewertungen
- Analytical Study On Safety Level of Stay Cables of Cable Stayed BridgeDokument8 SeitenAnalytical Study On Safety Level of Stay Cables of Cable Stayed Bridgesushil deshmukhNoch keine Bewertungen
- Project Report: Digital Logic DesignsDokument17 SeitenProject Report: Digital Logic DesignsSiddique FarooqNoch keine Bewertungen
- Redland Bonding Gutter Installation Instructions 3Dokument9 SeitenRedland Bonding Gutter Installation Instructions 3JNoch keine Bewertungen
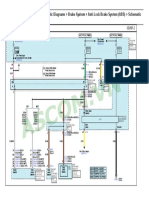
- 2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsDokument1 Seite2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsHuy Trần QuốcNoch keine Bewertungen
- A Ground-Motion Transfer Function Matrix Between Two Nearby Rock and Soil Sites: A System Identification ProblemDokument13 SeitenA Ground-Motion Transfer Function Matrix Between Two Nearby Rock and Soil Sites: A System Identification ProblemRicardo Angelo Quispe MendizábalNoch keine Bewertungen
- MA WAFLInternals V2.0Dokument20 SeitenMA WAFLInternals V2.0Vimal PalanisamyNoch keine Bewertungen
- Math Samples PDFDokument1 SeiteMath Samples PDFArwin VillegasNoch keine Bewertungen