Das könnte Ihnen auch gefallen
- RTS Ptu Sample Paper Lords MBDDokument48 SeitenRTS Ptu Sample Paper Lords MBDKaveesh NykNoch keine Bewertungen
- Project Report of Post Office Management SystemDokument20 SeitenProject Report of Post Office Management SystemSumit Tembhare75% (12)
- LTE Sim TutorialDokument6 SeitenLTE Sim TutorialNoor El DinNoch keine Bewertungen
- Rrlature Concept Called Cycle: TL Rvugh AsDokument20 SeitenRrlature Concept Called Cycle: TL Rvugh AsKamal JaiswalNoch keine Bewertungen
- Conversion Between Number SystemsDokument16 SeitenConversion Between Number SystemsAtharv ChopadeNoch keine Bewertungen
- Department of Compuetr Science and Engineering: Lab Manual Information SecurityDokument89 SeitenDepartment of Compuetr Science and Engineering: Lab Manual Information SecuritydkishoreNoch keine Bewertungen
- BookstoreDokument12 SeitenBookstoreYogesh GandhiNoch keine Bewertungen
- OOP Annexure 2 (Group 18) Deepak GaundDokument11 SeitenOOP Annexure 2 (Group 18) Deepak Gaund68 DEEPAK GAUNDNoch keine Bewertungen
- Payment Billing System DocumentDokument71 SeitenPayment Billing System DocumentParveen KumarNoch keine Bewertungen
- It201 - Sad - Part 2Dokument4 SeitenIt201 - Sad - Part 2rayden22Noch keine Bewertungen
- CFD LibrariesDokument13 SeitenCFD LibrariesAtad NabudNoch keine Bewertungen
- Six Phases of Systems Analysis & DesignDokument5 SeitenSix Phases of Systems Analysis & DesignSourabh ChakrabortyNoch keine Bewertungen
- Intro To LV in S For Control and SimDokument76 SeitenIntro To LV in S For Control and SimAdriano NavarroNoch keine Bewertungen
- OF (Departmental Store) : Submitted By:-Guided By: Name Naveen Yadav Regd. No 10906014 Rollno RB6905B34 Submitted ToDokument16 SeitenOF (Departmental Store) : Submitted By:-Guided By: Name Naveen Yadav Regd. No 10906014 Rollno RB6905B34 Submitted ToAJay Kumar SaklaniNoch keine Bewertungen
- Ibd ManualDokument12 SeitenIbd ManualUsama Bin ShakeelNoch keine Bewertungen
- Pci Micro ProjectDokument17 SeitenPci Micro Projectomkarshelke705Noch keine Bewertungen
- Final Project ReportDokument34 SeitenFinal Project ReportSahadev MarikNoch keine Bewertungen
- 1.1 Problem Definition & Relevent TheoryDokument31 Seiten1.1 Problem Definition & Relevent TheoryEr Mukesh MistryNoch keine Bewertungen
- Project Hotel ManagementDokument29 SeitenProject Hotel ManagementfaggsknNoch keine Bewertungen
- 81 Troubleshooting FortiGateDokument10 Seiten81 Troubleshooting FortiGateSsalar HadadNoch keine Bewertungen
- From Design To Implementation: Linear ControllersDokument22 SeitenFrom Design To Implementation: Linear Controllersสหายดิว ลูกพระอาทิตย์Noch keine Bewertungen
- Network SimulatorDokument15 SeitenNetwork Simulatorcrasherzero99888Noch keine Bewertungen
- College Managment Information SystemDokument25 SeitenCollege Managment Information System9096308941Noch keine Bewertungen
- Project SynopsisDokument17 SeitenProject Synopsisv68whrmhwbNoch keine Bewertungen
- Computer Science: E M S S SDokument34 SeitenComputer Science: E M S S SWeb InaudioNoch keine Bewertungen
- A Kernel Trace Device For Plan9Dokument29 SeitenA Kernel Trace Device For Plan9matematikralj_2Noch keine Bewertungen
- Production Activity Control Systems: Design, Development and Implementation: ESPRIT WorkshopDokument116 SeitenProduction Activity Control Systems: Design, Development and Implementation: ESPRIT WorkshopDelta Anakx PagaralamzNoch keine Bewertungen
- Digital ClockDokument16 SeitenDigital ClockTeja DarisiNoch keine Bewertungen
- Practical Control Loop Tuning Using A Matlab/Simulink ToolboxDokument5 SeitenPractical Control Loop Tuning Using A Matlab/Simulink Toolboxmo_waqNoch keine Bewertungen
- Vision MissionsDokument39 SeitenVision MissionsRishabh MishraNoch keine Bewertungen
- Hardware in The Loop DissertationDokument7 SeitenHardware in The Loop DissertationPaperWritingWebsiteSingapore100% (1)
- Optimizing and Improving Opensimulator PerformanceDokument32 SeitenOptimizing and Improving Opensimulator PerformanceJohn SimmonsNoch keine Bewertungen
- C++ Project On Railway Reservation SystemDokument56 SeitenC++ Project On Railway Reservation SystemRaj Hi Razz25% (8)
- Project Bank: - Brought To You by - Ultimate Collection of Projects & Source Codes in All Programming LanguagesDokument7 SeitenProject Bank: - Brought To You by - Ultimate Collection of Projects & Source Codes in All Programming LanguagesRavi GuptaNoch keine Bewertungen
- Eth Informatik Bachelor ThesisDokument6 SeitenEth Informatik Bachelor ThesisCollegePaperHelpFargo100% (2)
- Xup Workshop 1 by Prasiddha SiwakotiDokument4 SeitenXup Workshop 1 by Prasiddha SiwakotiGaihre KrishnaNoch keine Bewertungen
- OF (Show The Day of Birth From Date of Birth)Dokument13 SeitenOF (Show The Day of Birth From Date of Birth)Yogesh GandhiNoch keine Bewertungen
- A Levels Computing 9691 Revision Notes PDFDokument14 SeitenA Levels Computing 9691 Revision Notes PDFmelina_elinaNoch keine Bewertungen
- CS462 Project Report: Name: Samuel Day 1. The Nature of The ProjectDokument7 SeitenCS462 Project Report: Name: Samuel Day 1. The Nature of The ProjectSam DayNoch keine Bewertungen
- Report Car ParkingDokument16 SeitenReport Car ParkingPRABINNoch keine Bewertungen
- OF (Show The Day of Birth From Date of Birth)Dokument13 SeitenOF (Show The Day of Birth From Date of Birth)Ajay KumarNoch keine Bewertungen
- Brian Brazil AnintroductiontoprometheusDokument48 SeitenBrian Brazil AnintroductiontoprometheusAmadou NdiayeNoch keine Bewertungen
- CN Lab ManualDokument34 SeitenCN Lab ManualChaya Bsvrj75% (4)
- Survey About Satey Critical Automoblie AppsDokument5 SeitenSurvey About Satey Critical Automoblie AppsMohamed SolimanNoch keine Bewertungen
- Post Office Management System A Java ProjectDokument41 SeitenPost Office Management System A Java ProjectrajeshmanamNoch keine Bewertungen
- Pms ReportDokument75 SeitenPms Reportabhithedandy0% (1)
- Outcome 2 (Programming) PDFDokument19 SeitenOutcome 2 (Programming) PDFDon de la CruzNoch keine Bewertungen
- Rajesh.R, Software Testing Engineer, Cell: 9293289558.: ExperienceDokument4 SeitenRajesh.R, Software Testing Engineer, Cell: 9293289558.: ExperienceanilkumarjanmNoch keine Bewertungen
- Vidya Vijay Bal Mandir School: Submitted To: Mr. Suraj JaiswalDokument25 SeitenVidya Vijay Bal Mandir School: Submitted To: Mr. Suraj JaiswalNitin JeewnaniNoch keine Bewertungen
- 16 Optimizing Linux System Performance 7043Dokument5 Seiten16 Optimizing Linux System Performance 7043gabjonesNoch keine Bewertungen
- LSMW Legacy System Migration Workbenc HDokument106 SeitenLSMW Legacy System Migration Workbenc HAkmal M100% (1)
- Mcabcamsc ProjectDokument23 SeitenMcabcamsc ProjectdivyashreebollamwarNoch keine Bewertungen
- Tutorial LTE SimDokument6 SeitenTutorial LTE SimgowdamandaviNoch keine Bewertungen
- ProntoScript Installers Guide PDFDokument12 SeitenProntoScript Installers Guide PDFIan JacksonNoch keine Bewertungen
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreVon EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreNoch keine Bewertungen
- Accelerated DevOps with AI, ML & RPA: Non-Programmer’s Guide to AIOPS & MLOPSVon EverandAccelerated DevOps with AI, ML & RPA: Non-Programmer’s Guide to AIOPS & MLOPSBewertung: 5 von 5 Sternen5/5 (1)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsVon EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNoch keine Bewertungen
- Foundation Course for Advanced Computer StudiesVon EverandFoundation Course for Advanced Computer StudiesNoch keine Bewertungen
- Gca 1Dokument9 SeitenGca 1Nguyễn Hưng IdiotsNoch keine Bewertungen
- Static Crosstalk-Noise AnalysisDokument127 SeitenStatic Crosstalk-Noise AnalysisNguyễn Hưng Idiots100% (1)
- Using The AXI DMA Engine PDFDokument34 SeitenUsing The AXI DMA Engine PDFNguyễn Hưng IdiotsNoch keine Bewertungen
- Lab4-Taeweon Modified CDMA PDFDokument8 SeitenLab4-Taeweon Modified CDMA PDFNguyễn Hưng IdiotsNoch keine Bewertungen
- Designing With PlanAheadDokument1 SeiteDesigning With PlanAheadNguyễn Hưng IdiotsNoch keine Bewertungen
- Speech Enhancement Spectral Subtraction: C6x Real-Time DSP 06/06/2001Dokument2 SeitenSpeech Enhancement Spectral Subtraction: C6x Real-Time DSP 06/06/2001Nguyễn Hưng IdiotsNoch keine Bewertungen
- 20 Site SummaryDokument2 Seiten20 Site SummaryMuzammil WepukuluNoch keine Bewertungen
- IRF350Dokument7 SeitenIRF350sanniviNoch keine Bewertungen
- Know PlywoodDokument3 SeitenKnow PlywoodNirvana NircisNoch keine Bewertungen
- Alloys DensityDokument4 SeitenAlloys DensityArnold Melissa CollettNoch keine Bewertungen
- BurnerDokument4 SeitenBurnerAhmed Mohamed KhalilNoch keine Bewertungen
- Quality ControlDokument10 SeitenQuality ControlSabbir AhmedNoch keine Bewertungen
- Noise and Vibration During CosntructionDokument12 SeitenNoise and Vibration During Cosntructionpierre3101Noch keine Bewertungen
- ENOVIA V6 Product PortfolioDokument32 SeitenENOVIA V6 Product PortfolioARUN PATILNoch keine Bewertungen
- 06-901 Keyed Input SwitchesDokument4 Seiten06-901 Keyed Input Switchesmajed al.madhajiNoch keine Bewertungen
- Coal Combustion Monitoring Report Unwashed Semi Rev02 08.24.2021Dokument17 SeitenCoal Combustion Monitoring Report Unwashed Semi Rev02 08.24.2021Keith Danae SuquibNoch keine Bewertungen
- Kubernetes CommandsDokument36 SeitenKubernetes CommandsOvigz Hero100% (2)
- CH 4 Data CommDokument4 SeitenCH 4 Data CommHenna ShainaNoch keine Bewertungen
- Coastal DefenceDokument112 SeitenCoastal DefenceMorvin BudhanNoch keine Bewertungen
- Ammonia Production From Natural Gas-Haldor Topsoe ProcessDokument22 SeitenAmmonia Production From Natural Gas-Haldor Topsoe ProcessYash BhimaniNoch keine Bewertungen
- Rational Suite ToolsDokument47 SeitenRational Suite ToolsZatin GuptaNoch keine Bewertungen
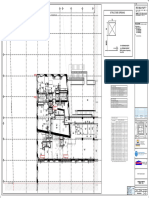
- 20105-AR-HOT-07-105-01 Rev 00Dokument1 Seite20105-AR-HOT-07-105-01 Rev 00Bahaa MohamedNoch keine Bewertungen
- PBLauncherDokument50 SeitenPBLauncherborreveroNoch keine Bewertungen
- Justine J. Beroy: Career ObjectivesDokument5 SeitenJustine J. Beroy: Career ObjectivesJustine BeroyNoch keine Bewertungen
- Fluid Mechanics Seventh Edition by Frank M. WhiteDokument1 SeiteFluid Mechanics Seventh Edition by Frank M. WhiteDarKaiserNoch keine Bewertungen
- Intermec CS40 SpecsDokument8 SeitenIntermec CS40 Specsss1222Noch keine Bewertungen
- EM230 BR BM3 Fitting InstructionsDokument2 SeitenEM230 BR BM3 Fitting InstructionsRoman BabaevNoch keine Bewertungen
- Defects in Welds: PorosityDokument40 SeitenDefects in Welds: PorosityrohanNoch keine Bewertungen
- Simatic EKB Install 2012-03-08Dokument2 SeitenSimatic EKB Install 2012-03-08Oton SilvaNoch keine Bewertungen
- Module002 LaboratoryExercise002Dokument2 SeitenModule002 LaboratoryExercise002Joaquin SmithNoch keine Bewertungen
- " " Reach: Ordering InformationDokument8 Seiten" " Reach: Ordering InformationTrong TranNoch keine Bewertungen
- Bio-Sensors and Bio-Devices: Spring 2020Dokument22 SeitenBio-Sensors and Bio-Devices: Spring 2020barristertoto99 chanNoch keine Bewertungen
- ChemCAD and ConcepSys AIChE Spring 09Dokument28 SeitenChemCAD and ConcepSys AIChE Spring 09ConcepSys Solutions LLCNoch keine Bewertungen
- AHRLACDokument18 SeitenAHRLACVictor Pileggi100% (1)
- Colchicine - British Pharmacopoeia 2016Dokument4 SeitenColchicine - British Pharmacopoeia 2016Social Service (V)100% (1)
- 2013 11 DUPLEX EasyDokument21 Seiten2013 11 DUPLEX EasyAnonymous HC0tWeNoch keine Bewertungen