International Journal of Civil Engineering and Technology (IJCIET), ISSN 0976 6308 (Print), INTERNATIONAL OF CIVIL ENGINEERING ISSN
N 0976 6316(Online) Volume JOURNAL 5, Issue 3, March (2014), pp. 71-76 IAEME AND TECHNOLOGY (IJCIET)
ISSN 0976 6308 (Print) ISSN 0976 6316(Online) Volume 5, Issue 3, March (2014), pp. 71-76 IAEME: www.iaeme.com/ijciet.asp Journal Impact Factor (2014): 7.9290 (Calculated by GISI) www.jifactor.com
IJCIET
IAEME
NEURAL NETWORK MODEL FOR DESIGN OF ONE-WAY R.C.C SLABS
Dr. B. Ramesh Babu Principal, Anantha Lakshmi Institute of Technology & Sciences, Anantapur, Andhra Pradesh, India.
ABSTRACT The design of R.C.C slabs involves many constraints like different edge conditions, loading, geometry and I.S. 456-2000 code provisions. The design has to satisfy all the constraints. This paper demonstrates the applicability of artificial neural networks for the design of one way slabs so as to satisfy all the design constraints. KEYWORDS: Artificial Neural Networks, One-Way Slabs, R.C.C. Slabs. 1. INTRODUCTION Due to different edge conditions, the designer has to design many number of one way slabs in any given building which becomes cumbersome. The present investigation proposes an alternative method for the easy design of one-way slabs using the principles of Neural Networks. Thus, the objective of the present work is to demonstrate the applicability of Artificial Neural Networks for the structural design of one-way slabs. The networks have been trained with design data obtained from design experts in the field. 2. DESIGN OF ONE- WAY SLABS 2.1 DEVELOPMENT OF SIMPLE NEURAL NETWORK MODEL The development of simple Artificial Neural network model for design of two-way slabs involves various steps such as 1. Generation of exemplar patterns. 2. Selection of network type.
71
International Journal of Civil Engineering and Technology (IJCIET), ISSN 0976 6308 (Print), ISSN 0976 6316(Online) Volume 5, Issue 3, March (2014), pp. 71-76 IAEME
3. Selection of input and output for the network. 4. Arriving at a suitable network configuration. 5. Training of a network. 6. Validation of the resulting network.
These stages are addressed in the following sections. 2.1.1 GENERATION OF EXEMPLAR PATTERNS The objective of this work is to develop neural network models for the design of one-way slabs. This requires a comprehensive set of examples that cover various parameters influencing the design of one-way slabs. All the training examples should invariably satisfy I.S. 456-2000 code provisions. For the present work, all the training examples have been developed by presenting different one-way slab problems to various design experts. The experts were asked to provide designs satisfying I.S. code provisions. The design variables considered are the span, live load, grades of concrete and steel and diameters of reinforcements. The design values are obtained for different spans viz., 3.0m, 3.5m, 4.0m, 4.5m and 5.0m. Three different live load intensities viz., 1.5, 2.0 and 4.0 KN/m2 are considered. M20 and M25 grades of concretes have been used. Reinforcement steel of three different grades viz. FE 250, FE 415 and FE 500 have been used. For main reinforcement, two diameters viz., 8.0mm and 10.0 mm are considered. For distribution reinforcement only 8.0mm diameter has been considered. For each set, the overall depth of slab required, main reinforcement spacing and distribution steel spacing are obtained. For the present problem, a total of hundred samples training examples are obtained from different experts such that these examples cover all the possible combinations of design variables considered. Out of these, seventy five examples have been used for training and twenty five examples are used for validation. 2.1.2 SELECTION OF NETWORK TYPE The present problem considered for the neural network application involves the mapping of the known parameters such as span lengths, loading, reinforcement details to design the RCC slabs. The design is highly dependent on these parameters as they interact among themselves in a nonlinear fashion. Therefore, while selecting a network type its ability for mapping complex non-linear relationships must be considered for application. From the literature available, it is observed that feed forward neural networks have the ability to map such non-linear relationships. Hence, the feed forward form of neural architecture is used for the design of slabs. 2.1.3 SELECTION OF INPUT AND OUTPUT In the present work, it is required to develop neural network models for the design of oneway slabs. This means, the models should be able to predict the values of the depth of the section, spacing of both main and distribution reinforcements for a given live load, grade of steel and concrete. The input layer for the network has been configured taking in to account the possible parameters that may influence the output. As the network is supposed to map the functional relationship between the input and output parameters, the performance of the network is highly sensitive to the input information. In addition, proper choice of input parameters improves the net performance for unseen problems i.e. the generalization capability. Accordingly the input to the network is chosen as follows:
72
International Journal of Civil Engineering and Technology (IJCIET), ISSN 0976 6308 (Print), ISSN 0976 6316(Online) Volume 5, Issue 3, March (2014), pp. 71-76 IAEME
span of the section (L) Live load (wl) Grade of concrete (fck) Grade of steel (fy) Diameter of main reinforcement (D1) Diameter of distribution reinforcement (d1)
Thus the input vector selected for this model is IP = { L, wl, fck, fy, D,d } ---------- (1)
Although the relationship between the input parameters and macroscopic behavior of the material is highly non-linear, the quantitative degree of non-linearity is not clearly known. Hence, only the linear terms have been induced in the input vector. The network is expected to establish the degree of non-linearity through the training examples in an implicit manner. The designer would like to know the depth of the section and the areas of reinforcement for the given grade of concrete, grade of steel, live load and edge condition. Thus the model should be able to predict the following. Overall Depth of slab (D) Spacing of main reinforcement (S1) Spacing of distribution reinforcement (S2)
Accordingly, the output vector for the neural network model is selected as OP = { D, S1,S2 } ---------- (2)
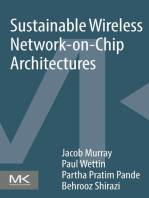
From the literature available it is learnt that computers work better for the values lying in between 0 and 1. So the input and output parameters have been normalized in the range (0, +1) using suitable normalization or scaling factors. This has been done by dividing the greatest entry at a node by a scale factor slightly greater than it. 2.1.4 SELECTING A SUITABLE NETWORK CONFIGURATION 2.1.4.1 SIMPLE BPN MODEL As mentioned earlier, the network configuration is defined in terms of the number, size, nodal properties, etc, of the input/output vectors and the intermediate hidden layers, once the input and output vectors are decided to cater the present investigation requirements, the task of selecting a suitable configuration has to be taken up. There is no direct method to select number of nodes in hidden layers. Generally a trial and error method is adopted for arriving at the network configuration. After doing a few trials, it is observed that the network with 10 neurons each in two hidden layer is behaving well. Accordingly a configuration of (6-10-10-3) has been selected for this network model. The architecture is depicted in Figure 1.
73
International Journal of Civil Engineering and Technology (IJCIET), ISSN 0976 6308 (Print), ISSN 0976 6316(Online) Volume 5, Issue 3, March (2014), pp. 71-76 IAEME
wl
fck
S1
fy
D1 S2 d1
Input layer (6Neurons)
Hidden layer1 (10 Neurons)
Hidden layer 2 (10 Neurons)
Output layer (3 Neurons)
Figure 1: The Final BPN Configuration for one way slabs 2.1.5. TRAINING OF SIMPLE BPN MODEL After choosing the network architecture, the training of the network for mapping the desired relationship between the input and the corresponding output has to be carried out. Initially, the weights and the thresholds matrix have been randomly generated using the facility in the software ANNS. With this weight and threshold matrix, the network is subjected to the traditional back propagation algorithm for training. A constant learning rate of 0.6 and a momentum factor of 0.9 have been adopted during the training. A number of trials have been done for finding the number of hidden layers and to find the number of neurons in each layer. After doing many trials it is decided to have a network with 2 hidden layers with 10 neurons in each layer. The performance of the network after every 1000 epochs is evaluated. One epoch consists of the presentation of the training examples and back propagating the error for each training pair once. During the training cycles, it has been observed that the weighted sum coming as input to a particular neuron does not change drastically. The thresholds on the other hand, change rapidly, taking the output of the neuron towards the desired values. In back propagation, the major factors in controlling the learning of a network is the learning rate and the threshold values of different neurons. As the number of neurons in the neighborhood of a typical neuron increases, the total weighted sum coming to it as its input also increases. And it takes little
74
International Journal of Civil Engineering and Technology (IJCIET), ISSN 0976 6308 (Print), ISSN 0976 6316(Online) Volume 5, Issue 3, March (2014), pp. 71-76 IAEME
time for back propagation algorithm to adjust the values of different thresholds for various neurons. The network was trained for 20000cycles. As it can be seen from the graphs, after 20000 cycles, the performance of the network is acceptable. At this stage the training of the network is terminated to avoid over training. Such an over training may hamper the generalization capabilities of the network. The training of the network accepted at this stage is depicted in figures 3(a-c). From these figures, it is observed that, the ANN model predicted the output which closely matches with analytical results. Thus, it can be concluded at this stage the network has learnt the relationship between input and output parameters successfully.
(a)
(b)
(c)
Fig 3. (a). Learning of BPN Model for Overall Depth of Slab, (b). Learning of BPN Model for Spacing of Main Reinforcement, (c). Learning of BPN Model for Spacing of Distribution Reinforcement 2.1.6. VALIDATION OF THE BPN MODEL Validation of the network is to test the network for the parameters that are not used in training of the network. The network was asked to predict the overall depth, main reinforcement spacing and distribution steel spacing of 25 sets which are not included in the training set. It can be seen from figures 5(a-c) that the values predicted by ANN model for new sets match satisfactorily with results of design experts. It can also be noticed that the designs provided by the neural network model satisfy all the provisions of I.S. 456-2000. Hence it can be concluded that this neural network model can be successfully used to design different one-way slabs.
(a)
(b)
(c)
Fig 5. (a). Validation of BPN Model for Overall Depth of Slab, (b).Validation of BPN Model for Spacing of Main Reinforcement, (c). Validation of BPN Model for Spacing of Distribution Reinforcement
75
International Journal of Civil Engineering and Technology (IJCIET), ISSN 0976 6308 (Print), ISSN 0976 6316(Online) Volume 5, Issue 3, March (2014), pp. 71-76 IAEME
3. CONCLUSION In this chapter the application of simple BPN network model for the design of one-way slab problem has been demonstrated. The network model has been trained using one hundred examples obtained from different design experts. The training examples are so chosen that they will cover all the design variables involved in the problem. It is observed the model learned the design of one way slabs with good accuracy satisfying I.S. 456-2000 provisions. In the future work we consider the design of two-way slabs. REFEENCES [1]. Rajasekharan, S., & Vijayalakshmi Pai,G.A., Neural Networks, Fuzzy Logic and genetic Algorithms, pp. 34-56,305-314, Prentice Hall of India , New Delhi,2003 . [2]. Davis, L. Hand book of genetic algorithms. Van Nostrand Reinholt, New York. 1991. [3]. Ni Hong-Guang , & Wang Ji-Zong., Prediction of Compressive Strength of Concrete by Neural Networks, Cement and Concrete Research, Vol.30, 2000, pp. 245-1250. [4]. Sanad, A., & Saka, M.P., Prediction of Ultimate Strength of Reinforced Concrete Deep Beams by Neural Networks, ASCE Journal of Structural Engineering, Vol. 127, No. 7, 2001, pp. 818-828. [5]. Cladera, A., & Mari, A.R., Shear Design Procedure for Reinforced Normal and High Strength Concrete Beams using Artificial Neural Networks Part II: Beams With Stirrups, Engineering Structures. Vol. 26, 2004, pp. 917-926. [6]. Cladera, A., & Mari, A.R., Shear Design Procedure for Reinforced Normal and High Strength Concrete Beams using Artificial Neural Networks. Part I: Beams without Stirrups, Engineering Structures, Vol. 26, 2004, pp. 927-936. [7]. Hadi, N.S., Neural Networks Applications in Concrete structures, Computers and Structures. Vol. 81, 2002, pp.373-381. [8]. Ghaboussi, J., & Joghatie., Active Control of Structures Using Networks, A.S.C.E Journal of structural engineering. Vol. 121, No. 4, 1995, pp.555-567. [9]. Mukharjee, A., & Deshpande., Application of Artificial Neural Networks in Structural Design Expert Systems, Computers and Structures, Vol. 54, No. 3,1995,pp. 367-375. [10]. Mishra, A.K., & Akhil Upadhyay., Column Design using ANN, ICI Journal, 2004, pp. 17-19. [11]. Rumel hart, D.E., Hinton, G.E., & Williams, R.J., Learning into representations by error propogation. In D.E Rumelhart. & McClelland (Eds), Parallel distributed processing: explorations in microstructure of cognition Cambridge. MA: Press. , 1986, pp. 318-362. [12]. Jenkins, W.M., Plane Frame Optimum Design Environment Based On Genetic Algorithm, Journal of Structural Engineering. Vol. 118, No.11, 1992, pp.3103-3112. [13]. Jenkins, W.M., Towards Structural Optimization Via The Genetic Algorithm, Computers and Structures.Vol. 40, 1991, pp. 1321-1327. [14]. Leite, J.P.B., & Topping, B.H.V., Improved Genetic Operators For Structural Engineering Optimization Advances in engineering software, Vol. 29, No. 7-9, 1998, pp. 529-562. [15]. Topping, B.H.V., & de Barros Leite, J.P., Parallel genetic Models for Structural Optimization. International Journal of Engineering Optimization, Vol. 31, No.1, 1998, pp. 65-99. [16]. Code of Practice for Plain and Reinforced Concrete I.S 456 2000. [17]. Mohammed S. Al-Ansari, Flexural Safety Cost of Optimized Reinforced Concrete Slabs, International Journal of Advanced Research in Engineering & Technology (IJARET), Volume 3, Issue 2, 2012, pp. 289 - 310, ISSN Print: 0976-6480, ISSN Online: 0976-6499.
76
Das könnte Ihnen auch gefallen
- Gilbert CH 6 TXTBK NotesDokument3 SeitenGilbert CH 6 TXTBK NotesBillie WrobleskiNoch keine Bewertungen
- Application of ANN To Predict Reinforcement Height of Weld Bead Under Magnetic FieldDokument5 SeitenApplication of ANN To Predict Reinforcement Height of Weld Bead Under Magnetic FieldInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- A Stack-Based Routing Methodology For Nanometric Analogue CMOS DevicesDokument7 SeitenA Stack-Based Routing Methodology For Nanometric Analogue CMOS DevicesSiddharthSharmaNoch keine Bewertungen
- Optimal Design Prediction of Singly Reinforced Concrete Beam Steel Using Artificial Neural NetworkDokument7 SeitenOptimal Design Prediction of Singly Reinforced Concrete Beam Steel Using Artificial Neural NetworksrijanNoch keine Bewertungen
- Distance Based Cluster Head Section in Sensor Networks For Efficient Energy UtilizationDokument9 SeitenDistance Based Cluster Head Section in Sensor Networks For Efficient Energy UtilizationIAEME PublicationNoch keine Bewertungen
- Calculation of Semicircular Arch Natural Frequency Using Artificial Neural NetworksDokument9 SeitenCalculation of Semicircular Arch Natural Frequency Using Artificial Neural NetworksFoolad GharbNoch keine Bewertungen
- Prediction and Comparison of High-Performance On-Chip Global InterconnectionDokument13 SeitenPrediction and Comparison of High-Performance On-Chip Global InterconnectionVimala PriyaNoch keine Bewertungen
- Neural Network Based RCC Column Design 771Dokument6 SeitenNeural Network Based RCC Column Design 771aiyubpatniNoch keine Bewertungen
- Modeling Ready Mix Concrete Slump Using Artificial Neural NetworkDokument9 SeitenModeling Ready Mix Concrete Slump Using Artificial Neural NetworkPradeep SharmaNoch keine Bewertungen
- Selecting An Artificial Neural Network For Efficient Modeling and Accurate Simulation of The Milling ProcessDokument12 SeitenSelecting An Artificial Neural Network For Efficient Modeling and Accurate Simulation of The Milling ProcessДраган РодићNoch keine Bewertungen
- Compare Performance of 2D and 3D Mesh Architectures in Network-On-ChipDokument5 SeitenCompare Performance of 2D and 3D Mesh Architectures in Network-On-ChipJournal of ComputingNoch keine Bewertungen
- Design of Hamming Encoder (23,16) For Emerging ApplicationsDokument7 SeitenDesign of Hamming Encoder (23,16) For Emerging ApplicationsReethika ChitithotiNoch keine Bewertungen
- IJRTI2209058 SharvaniDokument7 SeitenIJRTI2209058 SharvaniPanku RangareeNoch keine Bewertungen
- Design and Simulation of Op-Amp Based Neuron CircuitDokument7 SeitenDesign and Simulation of Op-Amp Based Neuron CircuitIJRASETPublicationsNoch keine Bewertungen
- 6Design-Space Exploration and Optimization 07556373Dokument14 Seiten6Design-Space Exploration and Optimization 07556373RM IDEAL SOLUTIONSNoch keine Bewertungen
- Define The ProblemDokument10 SeitenDefine The ProblemmohammedelshafieNoch keine Bewertungen
- VLSI: Techniques For Efficient Standard Cell Placement: Aditi Malik Deepak Kumar Arora Sanjay KumarDokument5 SeitenVLSI: Techniques For Efficient Standard Cell Placement: Aditi Malik Deepak Kumar Arora Sanjay KumarKumar KumarNoch keine Bewertungen
- Direct Self Control of Induction Motor Based On Neural NetworkDokument9 SeitenDirect Self Control of Induction Motor Based On Neural NetworksethukumarkNoch keine Bewertungen
- Prediction Concrete Strength Neuronal NetworkDokument6 SeitenPrediction Concrete Strength Neuronal NetworkolazagutiaNoch keine Bewertungen
- Material RemovalDokument10 SeitenMaterial RemovalIAEME PublicationNoch keine Bewertungen
- A Time-Delay Neural Networks Architecture For Structural Damage DetectionDokument5 SeitenA Time-Delay Neural Networks Architecture For Structural Damage DetectionJain DeepakNoch keine Bewertungen
- Energies: Analysis of IEC 61850-9-2LE Measured Values Using A Neural NetworkDokument20 SeitenEnergies: Analysis of IEC 61850-9-2LE Measured Values Using A Neural NetworkUdomsak ThanatkhaNoch keine Bewertungen
- Application of Artificial Neural Network For Path Loss Prediction in Urban Macrocellular EnvironmentDokument6 SeitenApplication of Artificial Neural Network For Path Loss Prediction in Urban Macrocellular EnvironmentAJER JOURNALNoch keine Bewertungen
- Neural Network Controller For Power Electronics CircuitsDokument7 SeitenNeural Network Controller For Power Electronics CircuitsIAES IJAINoch keine Bewertungen
- Fault Diagnosis in Analog Electronic Circuits - THDokument16 SeitenFault Diagnosis in Analog Electronic Circuits - THBorut ViNoch keine Bewertungen
- Elris2D: A Matlab Package For The 2D Inversion of DC Resistivity/IP DataDokument20 SeitenElris2D: A Matlab Package For The 2D Inversion of DC Resistivity/IP DataJakasura TariganNoch keine Bewertungen
- Variation Tolerant Clock Distribution Network For NomicroprocessorDokument8 SeitenVariation Tolerant Clock Distribution Network For NomicroprocessorKhadar BashaNoch keine Bewertungen
- DR AHMAD ALSHAFEYDokument12 SeitenDR AHMAD ALSHAFEYalasamiNoch keine Bewertungen
- Consortium Techno 0019Dokument2 SeitenConsortium Techno 0019Saeed AnwarNoch keine Bewertungen
- Wearout Resilience in Nocs Through An Aging Aware Adaptive Routing AlgorithmDokument5 SeitenWearout Resilience in Nocs Through An Aging Aware Adaptive Routing AlgorithmNguyen Van ToanNoch keine Bewertungen
- Neural Network Prediction forRectangularR - CExteriorEdgeColumnSubjectedtoTorsionEffectDokument16 SeitenNeural Network Prediction forRectangularR - CExteriorEdgeColumnSubjectedtoTorsionEffectOrhan YanyatmazNoch keine Bewertungen
- Final VivaDokument21 SeitenFinal VivavenkyNoch keine Bewertungen
- Communication Centric Oorplanning of Noc Based System On ChipDokument10 SeitenCommunication Centric Oorplanning of Noc Based System On ChipVENKATRAMANNoch keine Bewertungen
- An Ultra Low-Power Memristive Neuromorphic Circuit For Internet of Things Smart SensorsDokument12 SeitenAn Ultra Low-Power Memristive Neuromorphic Circuit For Internet of Things Smart Sensorsdan_intel6735Noch keine Bewertungen
- Synopsis SeminarDokument3 SeitenSynopsis SeminarPALAK PAREEKNoch keine Bewertungen
- Fault IdentificationDokument5 SeitenFault IdentificationRajesh Kumar PatnaikNoch keine Bewertungen
- The DEEC and EDEEC Heterogeneous WSN Routing ProtocolsDokument8 SeitenThe DEEC and EDEEC Heterogeneous WSN Routing ProtocolsMehboob RahmanNoch keine Bewertungen
- FPGA Implementation ON-Chip Communication Using Implementation of 9 Port Router For Ommunication Using V Outer For 3D VerilogDokument6 SeitenFPGA Implementation ON-Chip Communication Using Implementation of 9 Port Router For Ommunication Using V Outer For 3D VerilogPraveen Kumar RNoch keine Bewertungen
- Modeling and Signal Integrity Analysis of RRAM-Based Neuromorphic Chip Crossbar Array Using Partial Equivalent Element Circuit (PEEC) MethodDokument11 SeitenModeling and Signal Integrity Analysis of RRAM-Based Neuromorphic Chip Crossbar Array Using Partial Equivalent Element Circuit (PEEC) MethodツギハギスタッカートNoch keine Bewertungen
- Evaluation of Dump Slope Stability of A Coal Mine Using Artificial Neuralnetwork 2168 9806 1000128Dokument5 SeitenEvaluation of Dump Slope Stability of A Coal Mine Using Artificial Neuralnetwork 2168 9806 1000128Abhijeet Dutta100% (1)
- Kinget Matching OffsetDokument14 SeitenKinget Matching OffsetMikeNoch keine Bewertungen
- Throughput Analysis of Ethernet and Fiber Distributed Data Interface Using OPNET IT Guru Academic Edition 9.1Dokument7 SeitenThroughput Analysis of Ethernet and Fiber Distributed Data Interface Using OPNET IT Guru Academic Edition 9.1Research Cell: An International Journal of Engineering SciencesNoch keine Bewertungen
- Iwanicki IR CS 045 2008Dokument8 SeitenIwanicki IR CS 045 2008Ionela NeacsuNoch keine Bewertungen
- Improved Accuracy Current-Mode Multiplier Circuits With Applications in Analog Signal Processing PDFDokument5 SeitenImproved Accuracy Current-Mode Multiplier Circuits With Applications in Analog Signal Processing PDFkrishnaavNoch keine Bewertungen
- 2 DHexagonal Mesh Vs 3 DMesh Networkon Chip APerformance EvaluationDokument10 Seiten2 DHexagonal Mesh Vs 3 DMesh Networkon Chip APerformance EvaluationRishabh KhobragadeNoch keine Bewertungen
- Performance Comparison of 2D and 3D Torus Network-on-Chip ArchitecturesDokument4 SeitenPerformance Comparison of 2D and 3D Torus Network-on-Chip ArchitecturesJournal of ComputingNoch keine Bewertungen
- Chapter 8 OSI Physical LayerDokument8 SeitenChapter 8 OSI Physical LayerZvone KlarinNoch keine Bewertungen
- ES PaperDokument22 SeitenES PaperRaghu Nath SinghNoch keine Bewertungen
- Optimum Design of Isolated RCC Footing Using Soft Computing TechniqueDokument6 SeitenOptimum Design of Isolated RCC Footing Using Soft Computing TechniqueBINDUSARA TSNoch keine Bewertungen
- Quality-Of-Service and Error Control Techniques For Mesh-Based Network-On-Chip ArchitecturesDokument30 SeitenQuality-Of-Service and Error Control Techniques For Mesh-Based Network-On-Chip ArchitecturesSrinivas HnNoch keine Bewertungen
- By Robert Prieto, Associate Professor, Universidad: Power Electronics Technology March 2005Dokument5 SeitenBy Robert Prieto, Associate Professor, Universidad: Power Electronics Technology March 2005Constantin DorinelNoch keine Bewertungen
- Vlsi Assingnment 1Dokument26 SeitenVlsi Assingnment 1Info StudioNoch keine Bewertungen
- 1 s2.0 S0167926022000025 MainDokument10 Seiten1 s2.0 S0167926022000025 MainMadhusmita PandaNoch keine Bewertungen
- ELRIS2D A MATLAB Package For The 2D Inversion of DC ResistivityIP Data PROCESSINGDokument21 SeitenELRIS2D A MATLAB Package For The 2D Inversion of DC ResistivityIP Data PROCESSINGNuansa SyairNoch keine Bewertungen
- Simulation Thesis ExampleDokument5 SeitenSimulation Thesis Exampledwk3zwbx100% (2)
- Scour PaperDokument6 SeitenScour Papermohammedasim1999Noch keine Bewertungen
- Nara@ime.a-Star - Edu.sg: Si Nanowire CMOS Transistors and Circuits by Top-Down Technology ApproachDokument1 SeiteNara@ime.a-Star - Edu.sg: Si Nanowire CMOS Transistors and Circuits by Top-Down Technology ApproachDinesh SinghNoch keine Bewertungen
- Evaluating Network Test Scenarios For Network Simulators SystemDokument18 SeitenEvaluating Network Test Scenarios For Network Simulators SystemAK GamsNoch keine Bewertungen
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesVon EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesNoch keine Bewertungen
- Building Wireless Sensor Networks: Application to Routing and Data DiffusionVon EverandBuilding Wireless Sensor Networks: Application to Routing and Data DiffusionNoch keine Bewertungen
- Impact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesDokument10 SeitenImpact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesIAEME PublicationNoch keine Bewertungen
- A Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurDokument7 SeitenA Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurIAEME PublicationNoch keine Bewertungen
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDokument14 SeitenModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationNoch keine Bewertungen
- Broad Unexposed Skills of Transgender EntrepreneursDokument8 SeitenBroad Unexposed Skills of Transgender EntrepreneursIAEME PublicationNoch keine Bewertungen
- Voice Based Atm For Visually Impaired Using ArduinoDokument7 SeitenVoice Based Atm For Visually Impaired Using ArduinoIAEME PublicationNoch keine Bewertungen
- A Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiDokument16 SeitenA Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiIAEME PublicationNoch keine Bewertungen
- A Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaDokument9 SeitenA Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaIAEME PublicationNoch keine Bewertungen
- Dealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsDokument8 SeitenDealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsIAEME PublicationNoch keine Bewertungen
- Influence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiDokument16 SeitenInfluence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiIAEME PublicationNoch keine Bewertungen
- Attrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesDokument15 SeitenAttrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesIAEME PublicationNoch keine Bewertungen
- Role of Social Entrepreneurship in Rural Development of India - Problems and ChallengesDokument18 SeitenRole of Social Entrepreneurship in Rural Development of India - Problems and ChallengesIAEME PublicationNoch keine Bewertungen
- A Multiple - Channel Queuing Models On Fuzzy EnvironmentDokument13 SeitenA Multiple - Channel Queuing Models On Fuzzy EnvironmentIAEME PublicationNoch keine Bewertungen
- EXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESDokument9 SeitenEXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESIAEME PublicationNoch keine Bewertungen
- Application of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDDokument19 SeitenApplication of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDIAEME PublicationNoch keine Bewertungen
- Various Fuzzy Numbers and Their Various Ranking ApproachesDokument10 SeitenVarious Fuzzy Numbers and Their Various Ranking ApproachesIAEME PublicationNoch keine Bewertungen
- A Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksDokument10 SeitenA Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksIAEME PublicationNoch keine Bewertungen
- Optimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsDokument13 SeitenOptimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsIAEME PublicationNoch keine Bewertungen
- Knowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentDokument8 SeitenKnowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentIAEME PublicationNoch keine Bewertungen
- Quality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceDokument7 SeitenQuality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceIAEME PublicationNoch keine Bewertungen
- Analysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsDokument13 SeitenAnalysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsIAEME PublicationNoch keine Bewertungen
- A Overview of The Rankin Cycle-Based Heat Exchanger Used in Internal Combustion Engines To Enhance Engine PerformanceDokument5 SeitenA Overview of The Rankin Cycle-Based Heat Exchanger Used in Internal Combustion Engines To Enhance Engine PerformanceIAEME PublicationNoch keine Bewertungen
- Sentiment Analysis Approach in Natural Language Processing For Data ExtractionDokument6 SeitenSentiment Analysis Approach in Natural Language Processing For Data ExtractionIAEME PublicationNoch keine Bewertungen
- Prediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsDokument13 SeitenPrediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsIAEME PublicationNoch keine Bewertungen
- Financial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelDokument9 SeitenFinancial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelIAEME PublicationNoch keine Bewertungen
- Moderating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorDokument7 SeitenModerating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorIAEME PublicationNoch keine Bewertungen
- Formulation of The Problem of Mathematical Analysis of Cellular Communication Basic Stations in Residential Areas For Students of It-PreparationDokument7 SeitenFormulation of The Problem of Mathematical Analysis of Cellular Communication Basic Stations in Residential Areas For Students of It-PreparationIAEME PublicationNoch keine Bewertungen
- Ion Beams' Hydrodynamic Approach To The Generation of Surface PatternsDokument10 SeitenIon Beams' Hydrodynamic Approach To The Generation of Surface PatternsIAEME PublicationNoch keine Bewertungen
- Analysis On Machine Cell Recognition and Detaching From Neural SystemsDokument9 SeitenAnalysis On Machine Cell Recognition and Detaching From Neural SystemsIAEME PublicationNoch keine Bewertungen
- A Review of Particle Swarm Optimization (Pso) AlgorithmDokument26 SeitenA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationNoch keine Bewertungen
- Evaluation of The Concept of Human Resource Management Regarding The Employee's Performance For Obtaining Aim of EnterprisesDokument6 SeitenEvaluation of The Concept of Human Resource Management Regarding The Employee's Performance For Obtaining Aim of EnterprisesIAEME PublicationNoch keine Bewertungen
- Business Canadian 8th Edition Griffin Test Bank DownloadDokument48 SeitenBusiness Canadian 8th Edition Griffin Test Bank DownloadEric Pepper100% (28)
- Handout Sa Personal Development G 11Dokument2 SeitenHandout Sa Personal Development G 11Alecks Luis JacobeNoch keine Bewertungen
- Psycolinguistic - Ahmad Nur Yazid (14202241058)Dokument3 SeitenPsycolinguistic - Ahmad Nur Yazid (14202241058)Galih Rizal BasroniNoch keine Bewertungen
- Born: Died:: 26 April 1920 in Kumbakonam, Tamil Nadu State, IndiaDokument7 SeitenBorn: Died:: 26 April 1920 in Kumbakonam, Tamil Nadu State, IndiaAtul Singh ChauhanNoch keine Bewertungen
- Competence-Based Learning Materials: Sector: TourismDokument68 SeitenCompetence-Based Learning Materials: Sector: TourismAnalizaViloriaNoch keine Bewertungen
- Jamila Chapter 2 and 3 With CorrectionsDokument18 SeitenJamila Chapter 2 and 3 With CorrectionsFAGAS FoundationNoch keine Bewertungen
- List OpenedSchoolDokument17 SeitenList OpenedSchoolRamesh vlogsNoch keine Bewertungen
- Graduate Nurse Resume ExamplesDokument9 SeitenGraduate Nurse Resume Examplesoyutlormd100% (1)
- Impulse Control DisorderDokument22 SeitenImpulse Control DisorderAhmad AltarefeNoch keine Bewertungen
- Catchup Math - Grade 72Dokument3 SeitenCatchup Math - Grade 72MARINELIA CLAMOSA100% (1)
- Dissertation IntroductionDokument3 SeitenDissertation IntroductionAnonymous 0FWhoTuNoch keine Bewertungen
- DLP Multimedia ElementsDokument11 SeitenDLP Multimedia ElementsThyne Romano AgustinNoch keine Bewertungen
- VILLAVERT Lesson 1 Worksheet Activity 2Dokument1 SeiteVILLAVERT Lesson 1 Worksheet Activity 2VILLAVERT DAINIEL MATTHEU B.Noch keine Bewertungen
- Analysing A Sample LSA (Skills) BEDokument23 SeitenAnalysing A Sample LSA (Skills) BECPPE ARTENoch keine Bewertungen
- Aa-Matrix Company ProfileDokument23 SeitenAa-Matrix Company ProfileBilly Joe BreakfastNoch keine Bewertungen
- Permit To StudyDokument5 SeitenPermit To StudyMichael Vallejos Magallanes ZacariasNoch keine Bewertungen
- HS 2nd Yr Assamese Syllabus 2016Dokument1 SeiteHS 2nd Yr Assamese Syllabus 2016Principal Universal AcademyNoch keine Bewertungen
- Queens Alumni Review 2012 - Spotlight: Bruce AlexanderDokument2 SeitenQueens Alumni Review 2012 - Spotlight: Bruce Alexanderalpha_abebeNoch keine Bewertungen
- YeshivishDokument5 SeitenYeshivishdzimmer6Noch keine Bewertungen
- Rotenberg Resume15Dokument2 SeitenRotenberg Resume15api-277968151Noch keine Bewertungen
- Articles Training GuideDokument156 SeitenArticles Training GuidescribdgiridarNoch keine Bewertungen
- ATG - NovicioDokument4 SeitenATG - Noviciorichie cuizon100% (1)
- Change Your Belief, Change Your LifeDokument1 SeiteChange Your Belief, Change Your LifeEric RichardsonNoch keine Bewertungen
- EMB-135-145 Rev 10Dokument18 SeitenEMB-135-145 Rev 10Jean-Michel ZituNoch keine Bewertungen
- Grade 3 - FilipinoDokument46 SeitenGrade 3 - FilipinoVanessa Buates BolañosNoch keine Bewertungen
- Daily Lesson Plan in Grade 10 MathematicsDokument6 SeitenDaily Lesson Plan in Grade 10 MathematicsRandy Asilum AlipaoNoch keine Bewertungen
- ww2 PFTDokument15 Seitenww2 PFTLPicarodaNoch keine Bewertungen
- Nursing MGT For StrokeDokument7 SeitenNursing MGT For StrokeRubijen NapolesNoch keine Bewertungen
- Grade 8 Music 3rd QuarterDokument38 SeitenGrade 8 Music 3rd Quarternorthernsamar.jbbinamera01Noch keine Bewertungen