Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Experiment 8 Series and Parallel Circuits Physics LabDokument7 SeitenExperiment 8 Series and Parallel Circuits Physics Labvada_soNoch keine Bewertungen
- 2.post + Drive Test 2G and 3GDokument62 Seiten2.post + Drive Test 2G and 3GsitouNoch keine Bewertungen
- 3com Baseline Plus Switch 2900 Gigabit Family: Switching SwitchingDokument4 Seiten3com Baseline Plus Switch 2900 Gigabit Family: Switching SwitchingTerry McginnisNoch keine Bewertungen
- TX R&S SU4200 - Operating - ManualDokument188 SeitenTX R&S SU4200 - Operating - ManualCiobanita Paul Adrian65100% (1)
- Green ComputingDokument4 SeitenGreen ComputingVinay PatilNoch keine Bewertungen
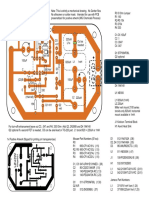
- Desulfator PCB PDFDokument1 SeiteDesulfator PCB PDFMarco Antonio NardyNoch keine Bewertungen
- RadwinDokument12 SeitenRadwinJose VazNoch keine Bewertungen
- ABB String InvertersDokument4 SeitenABB String InvertersJosephine LegakNoch keine Bewertungen
- 1253Dokument8 Seiten1253Yash SinghNoch keine Bewertungen
- Mobile Phone Parts Functions & Identification (The Big Parts) Cute MobileTechDokument13 SeitenMobile Phone Parts Functions & Identification (The Big Parts) Cute MobileTechCharles AbrahamNoch keine Bewertungen
- Harmonics in Three Phase TransformersDokument3 SeitenHarmonics in Three Phase TransformersSaurabhThakurNoch keine Bewertungen
- GSM Security Concerns: OperatorsDokument36 SeitenGSM Security Concerns: Operatorsgkutty9Noch keine Bewertungen
- DigitalSignalProcessing Course McGillDokument6 SeitenDigitalSignalProcessing Course McGillSalman NazirNoch keine Bewertungen
- APZ21240 HardwareDokument5 SeitenAPZ21240 Hardwareledungvms0% (1)
- Module 5 - Digital Techniques Electronic Instrument Systems PDFDokument42 SeitenModule 5 - Digital Techniques Electronic Instrument Systems PDFanilmathew244Noch keine Bewertungen
- Magellan Maestro 4700: User ManualDokument49 SeitenMagellan Maestro 4700: User Manualcriggs63Noch keine Bewertungen
- 03 RA4133 RL20 LTE KPI Architecture E01Dokument46 Seiten03 RA4133 RL20 LTE KPI Architecture E01Teguh YuliantoNoch keine Bewertungen
- Kaifa Meter Nameplate and LCD Description 20200513Dokument51 SeitenKaifa Meter Nameplate and LCD Description 20200513AmrNoch keine Bewertungen
- Television: Installing The TV To The WallDokument2 SeitenTelevision: Installing The TV To The WallAbhishekNoch keine Bewertungen
- Aeng 514 FinalDokument722 SeitenAeng 514 FinalPaul GernahNoch keine Bewertungen
- Hannstar J mv-4 94v-0 0823 - Dell - Studio - 1435 - 1535 - QUANTA - FM6 - DISCRETE - REV - 3A PDFDokument58 SeitenHannstar J mv-4 94v-0 0823 - Dell - Studio - 1435 - 1535 - QUANTA - FM6 - DISCRETE - REV - 3A PDFPaxOtium75% (4)
- HL-740 (TM) 7-5Dokument17 SeitenHL-740 (TM) 7-5REMZONANoch keine Bewertungen
- Lenovo IdeaPad U350 UserGuide V1.0Dokument138 SeitenLenovo IdeaPad U350 UserGuide V1.0Marc BengtssonNoch keine Bewertungen
- From TDM To Voip: Why The Migration & How To PlanDokument8 SeitenFrom TDM To Voip: Why The Migration & How To Planbuco1234Noch keine Bewertungen
- Application Note 9093, From ON SemiconductorDokument7 SeitenApplication Note 9093, From ON SemiconductorPaul-Lucian SiposNoch keine Bewertungen
- Ev Tx1152 PDFDokument2 SeitenEv Tx1152 PDFChrisNoch keine Bewertungen
- Gigabyte Motherboard ManualDokument32 SeitenGigabyte Motherboard ManualbobbydebNoch keine Bewertungen
- CIM Motor Curve Am 0255Dokument1 SeiteCIM Motor Curve Am 0255Julio CostaNoch keine Bewertungen
- Manual D1750Dokument48 SeitenManual D1750Liaquat Najmi67% (3)
- Next Generation ExchangeDokument15 SeitenNext Generation ExchangeVinay TannaNoch keine Bewertungen