Das könnte Ihnen auch gefallen
- Simulación de circuitos electrónicos con OrCAD® PSpice®Von EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Noch keine Bewertungen
- La Biblia Del TV LED Tomo 1Dokument184 SeitenLa Biblia Del TV LED Tomo 1juan maly100% (2)
- Módulo CCP, PIC18F4550Dokument20 SeitenMódulo CCP, PIC18F4550carlos noelNoch keine Bewertungen
- Investigación Sobre Modulo CCP (Capture, Compare, PWM)Dokument10 SeitenInvestigación Sobre Modulo CCP (Capture, Compare, PWM)JP Cylia Toapanta100% (2)
- Practica TemporizadoresDokument10 SeitenPractica TemporizadoresJennifer Otazú ValdiviaNoch keine Bewertungen
- Proyecto Con Microcontrolador Pic16f628a1Dokument13 SeitenProyecto Con Microcontrolador Pic16f628a1Omar Ramirez HerreraNoch keine Bewertungen
- Ilovepdf MergedDokument57 SeitenIlovepdf MergedAlan Varela GarcíaNoch keine Bewertungen
- Resumen CCPDokument10 SeitenResumen CCPDanielSaniNoch keine Bewertungen
- Módulo CCP y Módulo EEPROMDokument19 SeitenMódulo CCP y Módulo EEPROMGabriel Llerena QuenayaNoch keine Bewertungen
- Modulo CCPDokument20 SeitenModulo CCPjesusdruizvNoch keine Bewertungen
- CCP Con CCSDokument17 SeitenCCP Con CCSGabo CasarrubiasNoch keine Bewertungen
- Microcontroladores II en C. Tema 3Dokument32 SeitenMicrocontroladores II en C. Tema 3Eduardo CastañedaNoch keine Bewertungen
- MPLABX C18 Control de PWMDokument17 SeitenMPLABX C18 Control de PWMkhriz_69Noch keine Bewertungen
- PC4 LaboratorioDokument7 SeitenPC4 LaboratorioEdgar Andres Cevallos RamirezNoch keine Bewertungen
- Modulo CCP (PWM)Dokument21 SeitenModulo CCP (PWM)Edson AguirreNoch keine Bewertungen
- PWMDokument13 SeitenPWMIsaac Noyola ManzanoNoch keine Bewertungen
- Control PWM de Un Motor DC Con Microcontroladores PICDokument5 SeitenControl PWM de Un Motor DC Con Microcontroladores PICJehison EscobarNoch keine Bewertungen
- Presentación PIC GAMA MEDIADokument25 SeitenPresentación PIC GAMA MEDIAdocto_luckyNoch keine Bewertungen
- Pic Modo CapturaDokument4 SeitenPic Modo CapturaJulian David RodriguezNoch keine Bewertungen
- Una Señal PWMDokument5 SeitenUna Señal PWMonepiece24Noch keine Bewertungen
- Ensayo Características y Descripción Del Módulo CCP Del MicrocontroladorDokument4 SeitenEnsayo Características y Descripción Del Módulo CCP Del MicrocontroladorArthur HerreraNoch keine Bewertungen
- MÓDULO CCP (CapturaDokument27 SeitenMÓDULO CCP (CapturaVeruska San Miguel0% (1)
- Soluciones Ejercicios Tema3 Estudiantes 05 06Dokument30 SeitenSoluciones Ejercicios Tema3 Estudiantes 05 06Milton AlvesNoch keine Bewertungen
- 10 - Módulo CCPDokument48 Seiten10 - Módulo CCPKevin René Alarcón CalderónNoch keine Bewertungen
- Práctica 9 Microprocesadores II PWMDokument6 SeitenPráctica 9 Microprocesadores II PWMBoris ZuñigaNoch keine Bewertungen
- Variador de Velocidad AC Con Triac y PICDokument10 SeitenVariador de Velocidad AC Con Triac y PICJose PocomuchaNoch keine Bewertungen
- Modulo PWMDokument6 SeitenModulo PWMpedro_aguilar_43Noch keine Bewertungen
- Práctica 9 Microprocesadores Ii PWMDokument4 SeitenPráctica 9 Microprocesadores Ii PWMArturo72Noch keine Bewertungen
- Medir Velocidad Con EncoderDokument10 SeitenMedir Velocidad Con EncoderbgodinezcNoch keine Bewertungen
- Choper de FrenadoDokument32 SeitenChoper de FrenadoRomulo TorresNoch keine Bewertungen
- Proyecto Control de Motor DCDokument7 SeitenProyecto Control de Motor DCPedro Ar MolinaNoch keine Bewertungen
- PWM Con El Modulo CCP Del Pic 16f877aDokument4 SeitenPWM Con El Modulo CCP Del Pic 16f877aVictor RodriguezNoch keine Bewertungen
- Diferencia Entre El Pic16f84a y El Pic16f628a - Marco Quispe PalaciosDokument9 SeitenDiferencia Entre El Pic16f84a y El Pic16f628a - Marco Quispe PalaciosMarco Quispe Palacios50% (2)
- PC4 LaboratorioDokument10 SeitenPC4 LaboratorioEdgar Andres Cevallos RamirezNoch keine Bewertungen
- Pic18f2550 - PWMDokument5 SeitenPic18f2550 - PWMJHON ERIC RODRIGUEZ CABEZASNoch keine Bewertungen
- Timers CCP Pic 18f877aDokument28 SeitenTimers CCP Pic 18f877aanon_376202896100% (1)
- Pic16f877 3Dokument39 SeitenPic16f877 3topotopoNoch keine Bewertungen
- Modulo CCP MicroDokument23 SeitenModulo CCP MicroAlberto Hinojosa100% (1)
- PIC16F873 v1Dokument22 SeitenPIC16F873 v1Mary RodríguezNoch keine Bewertungen
- PIC18F2550 - CCPX en Modo Comparación y CapturaDokument4 SeitenPIC18F2550 - CCPX en Modo Comparación y CapturaOliver Andreé Morales Aquino100% (1)
- Configuracion Del Modulo CCPDokument16 SeitenConfiguracion Del Modulo CCPJuan Diego CuestaNoch keine Bewertungen
- Tema 6 - MicrocontroladoresDokument20 SeitenTema 6 - MicrocontroladoresJulio Cesar Pampa MamaniNoch keine Bewertungen
- Modo de Captura en El Módulo CCPDokument7 SeitenModo de Captura en El Módulo CCPelkillyNoch keine Bewertungen
- Informe Final Laboratorio 2 MicroDokument7 SeitenInforme Final Laboratorio 2 MicroJosue Marcelo ChavarriaNoch keine Bewertungen
- Praticas MicrosDokument19 SeitenPraticas MicrosArroz Frito Poki de LimónNoch keine Bewertungen
- Clase 07 Timer2 CCP Rev20110Dokument3 SeitenClase 07 Timer2 CCP Rev20110jonyrodriguezNoch keine Bewertungen
- Módulo CCP, Comparador y CapturaDokument13 SeitenMódulo CCP, Comparador y CapturaARAM RIVAS GOMEZNoch keine Bewertungen
- Report e LedsDokument12 SeitenReport e LedsJose Antonio Huerta CaballeroNoch keine Bewertungen
- Tema 6 MicrocontroladoresDokument20 SeitenTema 6 MicrocontroladoresWilson CanoNoch keine Bewertungen
- Control de Velocidad PWM para Motores de Corriente DirectaDokument6 SeitenControl de Velocidad PWM para Motores de Corriente DirectaeeindustrialNoch keine Bewertungen
- LCD Mas Pic16f877Dokument17 SeitenLCD Mas Pic16f877freimarNoch keine Bewertungen
- Manejo Timers PDFDokument51 SeitenManejo Timers PDFJulian AranaNoch keine Bewertungen
- MicrochipDokument6 SeitenMicrochipDany Omar ValenciaNoch keine Bewertungen
- PWM DiapositivasDokument19 SeitenPWM DiapositivasJesus Alfredo100% (1)
- In For Me Practica 2Dokument10 SeitenIn For Me Practica 2Jose OrtizNoch keine Bewertungen
- Laboratorio 9 Modulo ADC y PWM Con El PIC 16F877ADokument9 SeitenLaboratorio 9 Modulo ADC y PWM Con El PIC 16F877AacajahuaringaNoch keine Bewertungen
- Control neuronal y difuso para sistemas fotovoltaicosVon EverandControl neuronal y difuso para sistemas fotovoltaicosNoch keine Bewertungen
- 100 circuitos de shields para arduino (español)Von Everand100 circuitos de shields para arduino (español)Bewertung: 3.5 von 5 Sternen3.5/5 (3)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaVon EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaNoch keine Bewertungen
- Televisión digital y telecomunicaciones en comunidades de propietariosVon EverandTelevisión digital y telecomunicaciones en comunidades de propietariosNoch keine Bewertungen
- Compilador C CCS y Simulador Proteus para Microcontroladores PICVon EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICBewertung: 2.5 von 5 Sternen2.5/5 (5)
- ProyectoDokument15 SeitenProyectosebastianNoch keine Bewertungen
- ParcialDokument4 SeitenParcialCarlos Felipe Velasquez OsorioNoch keine Bewertungen
- Version2 Pca 9685Dokument16 SeitenVersion2 Pca 9685Sandra JaramilloNoch keine Bewertungen
- Fuentes Conmutadas InversoraDokument4 SeitenFuentes Conmutadas InversoraMarcoNoch keine Bewertungen
- Desarrollo Inversor Con SG3525Dokument4 SeitenDesarrollo Inversor Con SG3525arturo vega100% (1)
- Tecnologia Del AutomovilDokument106 SeitenTecnologia Del AutomovilGuille Comunicar100% (1)
- PWM PotenciaDokument8 SeitenPWM PotenciaRicardo Sanchez HernandezNoch keine Bewertungen
- Manual Scena 2017Dokument80 SeitenManual Scena 2017eliseoNoch keine Bewertungen
- 8 Conversión AD y DADokument12 Seiten8 Conversión AD y DAMARA TERESA CRUZ PINEDANoch keine Bewertungen
- Oficio 43 NOVEDADESDokument14 SeitenOficio 43 NOVEDADESJulian MendozaNoch keine Bewertungen
- Convertidores CCDokument33 SeitenConvertidores CCMijail PichaNoch keine Bewertungen
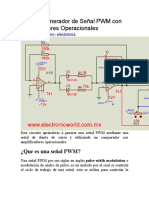
- Circuito Generador de Señal PWM Con Amplificadores OperacionalesDokument10 SeitenCircuito Generador de Señal PWM Con Amplificadores Operacionalesdrivers automotrizNoch keine Bewertungen
- Perfil Proyecto de Aplicación Grupo 1 Telecomunicaciones 2Dokument12 SeitenPerfil Proyecto de Aplicación Grupo 1 Telecomunicaciones 2Joel SalahNoch keine Bewertungen
- Robot de 5 Grados de LibertadDokument29 SeitenRobot de 5 Grados de LibertadEdison SegoviaNoch keine Bewertungen
- Clase 01 Arduino ThinkercadDokument30 SeitenClase 01 Arduino ThinkercadNicolas ChavezNoch keine Bewertungen
- Prácticas Con Arduino UnoDokument22 SeitenPrácticas Con Arduino UnoDiego Fernando Hurtado CollazosNoch keine Bewertungen
- Inversor PWM OPWM y PWM ProgramableDokument6 SeitenInversor PWM OPWM y PWM ProgramableRigo Martinez MNoch keine Bewertungen
- Remote Control of DC Motor-Section-II-Controller DC Motor by ArduinoDokument11 SeitenRemote Control of DC Motor-Section-II-Controller DC Motor by ArduinoAlEjAnDrO CoNtReRaSNoch keine Bewertungen
- Sanchez Jose Dispensador Automatico PastillasDokument50 SeitenSanchez Jose Dispensador Automatico PastillasFrankNoch keine Bewertungen
- Electronica de Potencia - Inversores y Aplicaciones 2020Dokument52 SeitenElectronica de Potencia - Inversores y Aplicaciones 2020Josimar OrtegaNoch keine Bewertungen
- Laboratorio - 2 UsartDokument4 SeitenLaboratorio - 2 UsartJuan PerezNoch keine Bewertungen
- Curso Interconexion de Redes Solucionespdf663 111007112028 Phpapp02 PDFDokument123 SeitenCurso Interconexion de Redes Solucionespdf663 111007112028 Phpapp02 PDFVictor Hugo Benitez PaezNoch keine Bewertungen
- Regulador de POTENCIA para Corriente Continua PWMDokument11 SeitenRegulador de POTENCIA para Corriente Continua PWMMarcosKramerNoch keine Bewertungen
- Brazo RoboticoDokument21 SeitenBrazo Roboticopanfiloramirez931Noch keine Bewertungen
- Eplex Solución de Problemas Guía: ContenidoDokument30 SeitenEplex Solución de Problemas Guía: ContenidogregorioNoch keine Bewertungen
- ALECOP Catalogo GeneralDokument182 SeitenALECOP Catalogo GeneralPaul Galvez100% (1)
- MCB-IIIX (Informacion General) PDFDokument12 SeitenMCB-IIIX (Informacion General) PDFangela1590Noch keine Bewertungen
- 4.-GUÍA DE PRÁCTICA DE TALLER Control de Velocidad Motor DCDokument2 Seiten4.-GUÍA DE PRÁCTICA DE TALLER Control de Velocidad Motor DCSANTIAGO FERNANDO ANDRADE ZURITANoch keine Bewertungen