MODELADO Y SIMULACIN DE SISTEMAS CON
MUESTREO NO CONVENCIONAL
TESIS DOCTORAL
Por: Carlos Mario Vlez Snchez
Director: D. Julin Salt Llobregat
UNIVERSIDAD POLITCNICA DE VALENCIA
DEPARTAMENTO DE INGENIERA DE SISTEMAS Y AUTOMTICA
VALENCIA - ESPAA
18 de junio de 2001
Dedicatoria
A mi esposa Ivette y a mi hijo Mario
Alejandro, mis dos grandes amores e
inspiradores.
Reconocimientos
"La investigacin cientfica consiste en ver lo que todo el mundo ha
visto, pero pensando en lo que nadie ha pensado". (A. Szent-Gyrgyi)
Al culminar un trabajo del cual nos sentimos satisfechos, siempre pensamos en todos
aquellos que lo hicieron posible. Estoy agradecido sinceramente con muchas personas
e instituciones, algunas de las cuales quiero ahora mencionar.
Mis ideales, formacin y creencias se las debo a mi madre, padre y hermanos.
Recuerdo especialmente a mi padre (q.e.p.d.), a quien quisiera tener en estos
momentos.
Nada de esto hubiera sido posible sin la orientacin de Julin Salt. Su forma de ser y
de hablar del control multifrecuencia me anim a incursionar e investigar en dicha
rea. El trabajo, ms que el resultado final, fue para mi una experiencia increble por
todo lo que represent interactuar con l, con mis compaeros y profesores del
doctorado y por lo que aprend y viv durante estos aos.
Mi esposa y mi hijo sufrieron los sacrificios para llegar a este instante. Con su amor y
paciencia se convirtieron en la razn para continuar, cuando no tena aliento para
hacerlo.
En los momentos ms difciles encontr en Dios una luz y mucha paz.
La Universidad EAFIT me apoy decididamente en los aos finales, incluso cuando
ya no tena la posibilidad de continuar con mi investigacin.
Gracias a mi amigo Gerardo Arango, la persona que ms ha apoyado mi carrera
acadmica.
Recuerdo a la Universidad Catlica de Oriente en Rionegro y a todos mis compaeros
all, en especial al Pbro. Daro Gmez Zuluaga. Ellos apoyaron mis primeros aos de
trabajo en el doctorado.
Agradezco a Espaa, a Valencia, a la Universidad Politcnica de Valencia, al
Departamento de Ingeniera de Sistemas y Automtica y a Gustavo Vivas por haber
apoyado mi proyecto de formacin.
Valencia, 28 de mayo de 2001
Resumen
En la tesis se implementa en MATLAB/SIMULINK una herramienta CACSD (el
Multirate Control Toolbox) que simplifica y clarifica la simulacin, el modelado y el
diseo de los sistemas multifrecuencia.
Para este fin se obtuvo inicialmente un modelo multifrecuencia que sintetiza en gran
parte el estado actual de los sistemas multifrecuencia. El modelo presenta las
caractersticas comunes de los mtodos de modelado multifrecuencia (representacin
invariable en el tiempo, aplicacin a sistemas SISO y MIMO, aplicacin a sistemas
con muestreo regular o irregular, nmero y perodos de muestreo arbitrarios de las
entradas y salidas), adems de una presentacin compacta fcil de implementar en un
algoritmo (incluyendo retardos) y la posibilidad de modelado del offset en entradas y
salidas (til para algunos casos especiales de muestreo, como se ver a lo largo del
trabajo).
Como ilustracin, en el diseo se muestran las posibilidades de aplicacin de
reguladores convencionales a sistemas de control multifrecuencia, utilizando los
grados de libertad adicionales que ofrece este tipo de muestreo no convencional y
teniendo en cuenta que a un sistema multifrecuencia le puede corresponder una
representacin invariable en el tiempo a un perodo global, conservando las
caractersticas del sistema original multifrecuencia. El diseo se integra en el Toolbox.
Al principio se hace una descripcin general del estado del arte del modelado y
control de sistemas multifrecuencia.
El trabajo se realiz bajo la asesora del Doctor Julin Salt Llobregat y la
colaboracin del Departamento de Ingeniera de Sistemas y Automtica de la
Universidad Politcnica de Valencia.
Resum
En la tesi simplementa en MATLAB/SIMULINK una ferramenta CACSD (el
Multirate Control Toolbox) que simplifica i aclareix la simulaci, el modelat i el
disseny dels sistemes de control multifrequncia.
Per a aquest fi es va obtenir inicialment un model multifrequncia que sintetitza en
gran part lestat actual del modelat dels sistemes multifrequncia. El model presenta
les caracterstiques comunes a tots els mtodes de modelat multifrequncia
(representaci invariable en el temps, aplicaci a sistemes SISO i MIMO, aplicaci a
sistemes amb mostreig regular o irregular, nombre i perides de mostreig arbitraris de
les entrades i eixides), a ms duna presentaci compacta fcil dimplementar en un
algoritme (incloent retards) i la possibilitat de modelat de loffset en entrades i
eixides (til per a alguns casos especials de mostreig, com es veur al llarg del
treball).
Com a il.lustraci, en el disseny es mostren les possibilitats daplicaci de reguladors
convencionals a sistemes de control multifrequncia, emprant els graus de llibertat
addicionals que ofereix aquest tipus de mostreig no convencional i tenint en compte
que a un sistema multifrequncia li pot correspondre una representaci invariable en
el temps a un peride global, conservant les caracterstiques del sistema original
multifrequncia. El disseny sintegra en la Toolbox.
Al principi es fa una descripci de lestat de lart del modelat i control de sistemes
multifrequncia.
El treball es va realitzar sota lassessoria del Doctor Julin Salt Llobregat i la
col.laboraci del Departament dEnginyeria de Sistemes i Automtica de la
Universitat Politcnia de Valncia.
Abstract
In the dissertation is developed the Multirate Control Toolbox in
MATLAB/SIMULINK, which simplifies the simulation, modeling and design of
multirate control systems.
For this purpose, a multirate modeling method was obtained initially, which
synthesizes the state of art of multirate control systems modeling. The new model has
the common characteristics of the more multirate modeling methods (linear time-
invariant representation, application to SISO and MIMO systems with regular or
irregular sampling schemes); moreover, it has a compact representation that is easy
to implement by means of a computer algorithm (including delays) and the
possibility of inputs and outputs offset modeling (the inclusion of offsets is useful for
some special cases of multirate sampling, such as will be looked lengthwise of work)
As an illustration of model advantages, in the design of multirate controllers are
indicated the application possibilities of conventional single-rate control design to
multirate control systems, using the degrees of freedom that allows this type of non-
conventional sampling and considering that a multirate system has a time-invariant
representation, which maintains the characteristics of original multirate system. The
proposed design methods are integrated in the Multirate Control Toolbox.
At the beginning of the work is presented a general state-of-art description of
multirate systems modeling and control.
The work was developed under the advice of the Doctor Julin Salt Llobregat, and
the collaboration of Engineering Systems and Control Department (DISA) of the
Polytechnic University of Valencia, Spain.
xi
Contenido
DEDICATORIA .......................................................................................I
RECONOCIMIENTOS............................................................................III
RESUMEN ............................................................................................. V
RESUM .............................................................................................. VII
ABSTRACT .......................................................................................... IX
CONTENIDO........................................................................................ XI
LISTA DE FIGURAS ........................................................................... XIV
CAPTULO 1. INTRODUCCIN ............................................................... 1
1.1. MOTIVACIN Y ALCANCE DE LA TESIS ......................................................................... 1
1.2. OBJETIVOS ....................................................................................................... 2
1.2.1. OBJETIVO GENERAL....................................................................................... 2
1.2.2. OBJETIVOS ESPECFICOS................................................................................. 2
1.3. CONTRIBUCIONES ............................................................................................... 3
1.4. ORGANIZACIN DEL TRABAJO.................................................................................. 4
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA........ 7
2.1. INTRODUCCIN .................................................................................................. 7
2.2. DEFINICIN DE SISTEMA MULTIFRECUENCIA ................................................................. 8
2.3. APLICACIONES DEL CONTROL MULTIFRECUENCIA ............................................................ 9
2.4. ASPECTOS HISTRICOS DEL MODELADO DE SISTEMAS MULTIFRECUENCIA ............................. 14
2.5. MTODOS DE CONTROL MULTIFRECUENCIA................................................................. 17
2.6. REVISIN DE MTODOS DE MODELADO DE SISTEMAS MULTIFRECUENCIA .............................. 20
2.6.1. DESCOMPOSICIN FRECUENCIAL O DE INTERRUPTORES ........................................... 20
2.6.2. OPERADORES DE KRANC............................................................................... 21
2.6.3. MTODO DE ARAKI - YAMAMOTO..................................................................... 23
2.7. RESUMEN DEL CAPTULO...................................................................................... 26
CAPTULO 3. MODELADO MULTIFRECUENCIA ...................................... 27
3.1. INTRODUCCIN ................................................................................................ 27
xii
3.2. NOTACIN DE PARMETROS E NDICES ..................................................................... 29
3.3. DEDUCCIN DEL MODELO .................................................................................... 31
3.3.1. DEDUCCIN DE LA ECUACIN DE ESTADO MULTIFRECUENCIA ..................................... 32
3.3.2. DEDUCCIN DE LA ECUACIN DE SALIDA MULTIFRECUENCIA...................................... 38
3.3.3. ECUACIONES DINMICAS. MODELO MULTIFRECUENCIA IRREGULAR .............................. 44
3.4. CARACTERSTICAS DEL MODELO ............................................................................. 46
3.4.1. CARACTERSTICAS GENERALES........................................................................ 46
3.4.2. ESTABILIDAD............................................................................................ 48
3.4.3. RANGO DE LAS MATRICES.............................................................................. 48
3.5. DEDUCCIN DE CASOS PARTICULARES...................................................................... 51
3.5.1. MODELO CON MUESTREO IRREGULAR Y SIN OFFSET EN LAS ENTRADAS .......................... 52
3.5.2. MODELO CON MUESTREO REGULAR ................................................................... 54
3.5.3. MODELO ZOH KRANC ................................................................................. 56
3.5.4. MODELO MRIC IRREGULAR CON OFFSET EN LAS ENTRADAS ...................................... 57
3.5.5. MODELO MRIC IRREGULAR SIN OFFSET EN LAS ENTRADAS ....................................... 58
3.5.6. MODELO MRIC CON MUESTREO REGULAR........................................................... 59
3.5.7. MODELO MROC IRREGULAR CON OFFSET EN LAS SALIDAS........................................ 61
3.5.8. MODELO MROC CON MUESTREO REGULAR.......................................................... 64
3.5.9. MODELO DE MUESTREO EN SERIE DE ENTRADAS .................................................... 68
3.5.10. MODELO DE MUESTREO EN SERIE DE SALIDAS..................................................... 69
3.6. CONCLUSIONES DEL CAPTULO............................................................................... 52
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA ............... 73
4.1. INTRODUCCIN ................................................................................................ 73
4.2. PLANTEAMIENTO DEL PROBLEMA DE DISEO ............................................................... 75
4.2.1. PROBLEMA CON UN GRADO DE LIBERTAD............................................................. 80
4.2.2. PROBLEMA CON DOS GRADOS DE LIBERTAD ......................................................... 82
4.2.3. CONDICIONES DEL DISEO ............................................................................ 84
4.3. REDISEO DIGITAL DE REGULADORES CONTINUOS. MAPEO DEL MODELO.............................. 84
4.3.1. IDEAS PRELIMINARES................................................................................... 84
4.3.2. DEDUCCIN DEL MTODO.............................................................................. 87
4.3.3. CARACTERSTICAS DEL MTODO ...................................................................... 89
4.3.4. PROCEDIMIENTO GENERAL ............................................................................. 90
4.4. MTODO DE ASIGNACIN DE POLOS ........................................................................ 91
4.4.1. IDEAS PRELIMINARES................................................................................... 91
4.4.2. DEDUCCIN DEL MTODO.............................................................................. 92
4.4.3. CARACTERSTICAS DEL MTODO ...................................................................... 94
4.4.4. PROCEDIMIENTO GENERAL ............................................................................. 95
4.5. PROBLEMA DE RIZADO EN ESQUEMAS MRIC. ELIMINACIN DEL RIZADO CON INTEGRADORES...... 96
4.6. CONCLUSIONES DEL CAPTULO............................................................................... 99
xiii
CAPTULO 5. EJEMPLOS Y SIMULACIN ............................................ 101
5.1. INTRODUCCIN ...............................................................................................101
5.2. BLOQUES DE MATLAB/SIMULINK DEL MULTIRATE CONTROL TOOLBOX.........................105
Sistema multifrecuencia irregular ........................................................................................ 105
Sistema multifrecuencia regular .......................................................................................... 106
Discretizador multifrecuencia irregular ................................................................................. 106
Discretizador multifrecuencia regular ................................................................................... 106
Operador de Kranc ............................................................................................................ 106
5.3. FUNCIONES DEL MULTIRATE CONTROL TOOLBOX......................................................107
5.4. EJEMPLOS......................................................................................................108
5.4.1. MODELADO MULTIFRECUENCIA .......................................................................108
Sistema SISO. Muestreo sin offset en la entrada ................................................................... 108
Sistema SISO. Muestreo con offset en la entrada .................................................................. 110
Sistema MIMO. Muestreo con offset en las entradas .............................................................. 111
Sistema con retardo .......................................................................................................... 113
5.4.2. RANGO DE LAS MATRICES DE SISTEMAS MULTIFRECUENCIA ......................................114
5.4.3. DISCRETIZACIN DE REGULADORES CONTINUOS ..................................................116
5.4.4. MAPEO DEL MODELO...................................................................................118
5.4.5. REGULADOR DE ASIGNACIN DE POLOS EN ESQUEMAS MRIC ...................................119
Muestreo irregular de una planta SISO de fase mnima .......................................................... 120
Muestreo irregular de una planta SISO de fase no mnima...................................................... 121
Muestreo regular de una planta SISO de fase mnima ............................................................ 123
Muestreo regular de una planta MIMO.................................................................................. 124
Asignacin de polos por realimentacin del estado................................................................. 125
5.4.6. ASIGNACIN DE POLOS EN UN ESQUEMA DE MUESTREO EN SERIE DE LAS ENTRADAS .........126
5.4.7. ELIMINACIN DEL RIZADO CON ADICIN DE UN INTEGRADOR....................................127
Planta SISO con muestreo regular ....................................................................................... 127
5.4.8. REGULADOR DE ASIGNACIN DE POLOS EN ESQUEMAS FOLI ....................................129
Planta inestable y de fase no mnima................................................................................... 129
Planta estable y de fase mnima.......................................................................................... 131
5.4.9. INCIDENCIA DEL MUESTREO IRREGULAR EN EL RIZADO ...........................................132
5.4.10. DISEO CON CONSIDERACIONES DE RANGO......................................................134
5.4.11. SIMULACIN DE SISTEMAS PERIDICOS ..........................................................137
5.5. CONCLUSIONES DEL CAPTULO..............................................................................140
CAPTULO 6. CONCLUSIONES Y RECOMENDACIONES......................... 143
ANEXO. FUNCIONES DEL MULTIRATE CONTROL TOOLBOX ................. 149
BIBLIOGRAFA ................................................................................. 164
NDICE............................................................................................. 173
xiv
Lista de figuras
FIG. 2.1 SISTEMA MULTIFRECUENCIA SISO...................................................................................8
FIG. 2.2 SISTEMA MULTIFRECUENCIA MIMO..................................................................................8
FIG. 2.3. APLICACIN DEL CONTROL MULTIFRECUENCIA EN ROBTICA..................................................... 11
FIG. 2.4. APLICACIN DEL CONTROL MULTIFRECUENCIA A PROCESOS INDUSTRIALES ..................................... 11
FIG. 2.5. APLICACIN DEL CONTROL MULTIFRECUENCIA A VEHCULOS TERRESTRES...................................... 12
FIG. 2.6. APLICACIN DEL CONTROL MULTIFRECUENCIA A SISTEMAS DE POLIMERIZACIN.............................. 12
FIG. 2.7. APLICACIN DEL CONTROL MULTIFRECUENCIA A SISTEMAS NEUMTICOS....................................... 13
FIG. 2.8. APLICACIN DEL CONTROL MULTIFRECUENCIA A LA AVINICA................................................... 13
FIG. 2.9. DESCOMPOSICIN FRECUENCIAL................................................................................... 21
FIG. 2.10 INTERPRETACIN DE LOS PROCESOS DE VECTORIZACIN Y REDUCCIN........................................ 22
FIG. 2.11 SISTEMA CONSIDERADO POR ARAKI - YAMAMOTO............................................................... 24
FIG. 3.1 SISTEMA CON MUESTREO IRREGULAR CONSIDERADO EN EL TRABAJO ............................................. 28
FIG. 3.2 ESQUEMA DE MUESTREO IRREGULAR (CON OFFSET) CONSIDERADO EN EL TRABAJO............................. 28
FIG. 3.3 ESQUEMA DE MUESTREO IRREGULAR CON SINCRONIZACIN DE ENTRADAS ...................................... 52
FIG. 3.4 ESQUEMA DE MUESTREO REGULAR.................................................................................. 54
FIG. 3.5 ESQUEMA DE MUESTREO MRIC IRREGULAR SIN SINCRONIZACIN DE ENTRADAS Y SALIDAS ................... 57
FIG. 3.6 ESQUEMA DE MUESTREO MRIC IRREGULAR CON SINCRONIZACIN DE ENTRADAS Y SALIDAS .................. 58
FIG. 3.7. ESQUEMA DE MUESTREO MRIC REGULAR......................................................................... 59
FIG. 3.8. ESQUEMA DE MUESTREO MROC IRREGULAR SIN SINCRONIZACIN DE ENTRADAS Y SALIDAS ................. 61
FIG. 3.9. ESQUEMA DE MUESTREO MROC REGULAR........................................................................ 64
FIG. 3.10. MODELO DE MUESTREO EN SERIE DE ENTRADAS ................................................................ 69
FIG. 3.11. MODELO DE MUESTREO EN SERIE DE SALIDAS................................................................... 70
FIG. 4.1. DISEO CON UN GRADO DE LIBERTAD ............................................................................. 75
FIG. 4.2 DISEO CON DOS GRADOS DE LIBERTAD .......................................................................... 76
FIG. 4.3. SISTEMA MULTIFRECUENCIA CORRESPONDIENTE A UN DISEO CON UN GRADO DE LIBERTAD .................. 77
FIG. 4.4. ESQUEMA DE MUESTREO FOLI (THE OUTPUS FIRST, THE INPUTS OF LAST) DE LA PLANTA................... 80
FIG. 4.5 REGULADOR DE ASIGNACIN DE POLOS POR REALIMENTACIN DE LA SALIDA EN UN ESQUEMA MRIC CON
REGULADOR ESTTICO .................................................................................................... 91
FIG. 5.1. BLOQUES DE SIMULACIN DEL MCT ............................................................................ 105
FIG. 5.2 DIAGRAMA DE SIMULACIN QUE COMPARA LAS RESPUESTAS TEMPORALES DE UN SISTEMA SISO CONTINUO Y
SU MODELO MULTIFRECUENCIA ......................................................................................... 109
FIG. 5.3 MUESTREO MULTIFRECUENCIA IRREGULAR DE UN SISTEMA SISO Y COMPARACIN CON LA RESPUESTA
CONTINUA (CON SINCRONIZACIN DE LA ENTRADA EN T
O
) .......................................................... 110
FIG. 5.4 MUESTREO MULTIFRECUENCIA IRREGULAR DE UN SISTEMA SISO Y COMPARACIN CON LA RESPUESTA
CONTINUA (SIN SINCRONIZACIN DE LA ENTRADA EN T
O
)........................................................... 111
xv
FIG. 5.5 DIAGRAMA DE SIMULACIN QUE COMPARA LAS RESPUESTAS TEMPORALES DE UN SISTEMA MIMO CONTINUO Y
SU MODELO MULTIFRECUENCIA ......................................................................................... 112
FIG. 5.6 MUESTREO MULTIFRECUENCIA IRREGULAR DE UN SISTEMA MIMO Y COMPARACIN CON LA RESPUESTA
CONTINUA (SIN SINCRONIZACIN DE LAS ENTRADAS EN T
O
)........................................................ 112
FIG. 5.7. MUESTREO MULTIFRECUENCIA IRREGULAR DE UN SISTEMA SISO CON RETARDO Y COMPARACIN CON LA
RESPUESTA CONTINUA (CON OFFSET DE LAS ENTRADAS) ............................................................. 113
FIG. 5.8 COMPARACIN DE RESPUESTAS CON UN REGULADOR MIMO CONTINUO Y SU EQUIVALENTE DISCRETO
MULTIFRECUENCIA....................................................................................................... 117
FIG. 5.9. DIAGRAMA DE SIMULACIN DE UN SISTEMA DE CONTROL MULTIFRECUENCIA POR MAPEO DEL MODELO CON
REALIMENTACIN DE LA SALIDA ........................................................................................ 119
FIG. 5.10. RESPUESTA TEMPORAL DE UN SISTEMA DE CONTROL MULTIFRECUENCIA POR MAPEO DEL MODELO CON
REALIMENTACIN DE LA SALIDA ........................................................................................ 119
FIG. 5.11. ACCIN DE CONTROL EN UN SISTEMA DE CONTROL MULTIFRECUENCIA POR MAPEO DEL MODELO CON
REALIMENTACIN DE LA SALIDA ........................................................................................ 119
FIG. 5.12 DIAGRAMA DE SIMULACIN DE UN SISTEMA SISO EN UN ESQUEMA IRREGULAR MRIC..................... 120
FIG. 5.13 RESPUESTA DE UN SISTEMA SISO CON UN REGULADOR DE ASIGNACIN DE POLOS EN UN ESQUEMA DE
MUESTREO MRIC IRREGULAR. CASO DE FASE MNIMA............................................................... 121
FIG. 5.14. ACCIN DE CONTROL EN UN SISTEMA SISO CON UN REGULADOR DE ASIGNACIN DE POLOS Y UN ESQUEMA
DE MUESTREO MRIC IRREGULAR. CASO DE FASE MNIMA ........................................................... 121
FIG. 5.15. RESPUESTA DE UN SISTEMA SISO CON UN REGULADOR DE ASIGNACIN DE POLOS EN UN ESQUEMA DE
MUESTREO MRIC IRREGULAR. CASO DE FASE MNIMA............................................................... 122
FIG. 5.16. ACCIN DE CONTROL EN UN SISTEMA SISO CON UN REGULADOR DE ASIGNACIN DE POLOS CON UN
ESQUEMA DE MUESTREO MRIC IRREGULAR. CASO DE FASE NO MNIMA. ........................................... 122
FIG. 5.17 DIAGRAMA DE SIMULACIN DE UN SISTEMA SISO EN UN ESQUEMA MRIC REGULAR....................... 123
FIG. 5.18 RESPUESTA DE UN SISTEMA SISO CON UN REGULADOR DE ASIGNACIN DE POLOS CON UN ESQUEMA DE
MUESTREO MRIC REGULAR. ........................................................................................... 124
FIG. 5.19. ACCIN DE CONTROL EN UN SISTEMA SISO CON UN REGULADOR DE ASIGNACIN DE POLOS CON UN
ESQUEMA DE MUESTREO MRIC REGULAR ............................................................................. 124
FIG. 5.20. RESPUESTA DE UN SISTEMA MIMO CON UN REGULADOR DE ASIGNACIN DE POLOS CON UN ESQUEMA DE
MUESTREO MRIC. ...................................................................................................... 125
FIG. 5.21. ACCIONES DE CONTROL EN UN SISTEMA CON MUESTREO EN SERIE .......................................... 126
FIG. 5.22. VARIABLES CONTROLADAS EN UN SISTEMA CON MUESTREO EN SERIE ....................................... 126
FIG. 5.23 RESPUESTA DE UN SISTEMA SISO CON UN REGULADOR DE ASIGNACIN DE POLOS CON ADICIN DE UN
INTEGRADOR, EN UN ESQUEMA DE MUESTREO MRIC................................................................. 129
FIG. 5.24. ACCIN DE CONTROL DE UN SISTEMA SISO CON UN REGULADOR DE ASIGNACIN DE POLOS CON ADICIN DE
UN INTEGRADOR, EN UN ESQUEMA DE MUESTREO MRIC............................................................. 129
FIG. 5.25. RESPUESTA TEMPORAL EN UN ESQUEMA FOLI Y CON UN REGULADOR DE ASIGNACIN DE POLOS POR
REALIMENTACIN DE LA SALIDA ........................................................................................ 130
FIG. 5.26. ACCIN DE CONTROL DE UN REGULADOR DE ASIGNACIN DE POLOS POR REALIMENTACIN DE LA SALIDA EN
UN ESQUEMA FOLI ..................................................................................................... 130
FIG. 5.27. COMPARACIN DE LAS RESPUESTAS TEMPORALES DE UN SISTEMA DE FASE NO MNIMA CON UN REGULADOR
DE ASIGNACIN DE LA SALIDA Y ESQUEMAS FOLI Y MRIC.......................................................... 130
FIG. 5.28. COMPARACIN DE LAS RESPUESTAS TEMPORALES DE UN SISTEMA DE FASE MNIMA CON UN REGULADOR DE
ASIGNACIN DE LA SALIDA Y ESQUEMAS FOLI Y MRIC ............................................................. 131
FIG. 5.29. COMPARACIN DE LAS ACCIONES DE CONTROL EN UN SISTEMA CON UNA PLANTA DE FASE MNIMA, UN
REGULADOR DE ASIGNACIN DE LA SALIDA Y ESQUEMAS FOLI Y MRIC............................................ 132
FIG. 5.30. DIAGRAMA DE SIMULACIN DE UN SISTEMA DE CONTROL MULTIFRECUENCIA POR REALIMENTACIN DEL
ESTADO.................................................................................................................. 134
FIG. 5.31. CAJA DE DILOGO EN UN BLOQUE TPICO DEL MULTIRATE CONTROL TOOLBOX ............................. 134
FIG. 5.32. RESPUESTA EN LAZO CERRADO DE UN SISTEMA MULTIFRECUENCIA CON REALIMENTACIN DEL ESTADO.
POLOS DESEADOS EN [0, 0]. KX = [-0.6542, 1.7013; 0.0468 1.7013].................................. 135
FIG. 5.33. RESPUESTA EN LAZO CERRADO DE UN SISTEMA MULTIFRECUENCIA CON REALIMENTACIN DEL ESTADO.
POLOS DESEADOS EN [-0.4, -0.4]. KX = [1.2793 -3.3271; -0.0915 -3.3271]...................... 135
xvi
FIG. 5.34. RESPUESTA EN LAZO CERRADO DE UN SISTEMA MULTIFRECUENCIA CON REALIMENTACIN DEL ESTADO.
POLOS DESEADOS EN [0.4, 0.4]. KX = [-2.5877 6.7296; 0.1851 6.7296] ......................... 136
FIG. 5.35. RESPUESTA EN LAZO CERRADO DE UN SISTEMA MULTIFRECUENCIA CON REALIMENTACIN DEL ESTADO.
POLOS DESEADOS EN [0.4, 0.4]. KX = [-0.0420 -2.0057; -2.2974 -1.1212]. USO DE LA FUNCIN
MEVAO................................................................................................................. 136
FIG. 5.36. SISTEMA PERIDICO............................................................................................ 137
FIG. 5.37. DIAGRAMA DE SIMULACIN DE UN SISTEMA PERIDICO ...................................................... 139
FIG. 5.38. EVOLUCIN DEL ESTADO DE UN SISTEMA PERIDICO ......................................................... 139
FIG. 5.39. ACCIONES DE CONTROL DE UN SISTEMA PERIDICO .......................................................... 139
Modelado y simulacin de sistemas con muestreo no convencional
1
Captulo 1. Introduccin
1.1. MOTIVACIN Y ALCANCE DE LA TESIS
En la literatura se encuentran varios tipos de modelado de sistemas multifrecuencia y
diversos esquemas de control adecuados a stos. Dicha variedad es injustificada, ya
que se trata del mismo problema y todos los modelos son equivalentes, como lo han
demostrado diferentes autores. Por ejemplo, Meyer [52] muestra que el modelado de
Kranc puede ser fcilmente extendido a sistemas MIMO y obtiene un mtodo de
modelado bastante general que es idntico a otros que se agrupan bajo el trmino de
la tcnica del lifting (estirado), la cual a su vez proviene del rea ms general de los
sistemas peridicos. La idea principal de la metodologa (obtencin de un sistema
invariable en el tiempo con un vector estirado de entradas y salidas) coincide con las
ideas originales de vectorizacin y reduccin planteadas y descritas por otros autores
([13],[79]).
Adems, aunque la mayora de mtodos mencionan la posibilidad de tratar el
problema de muestreo irregular (o no uniforme, el cual se describe en el epgrafe 3.1),
ste no ha sido abordado con la suficiente profundidad. El trabajo de Salt [67] abre
un camino importante en el modelado de este tipo de sistemas y motiva, con las ideas
que all se exponen, a un estudio ms profundo del tema. Por ejemplo, al anlisis de
la posibilidad de extensin a sistemas ms generales y la explotacin de la
irregularidad para efectos del diseo y cumplimiento de especificaciones. La utilidad
del muestreo irregular se observa en sistemas como el de la Fig. 2.6 (pgina 12).
CAPTULO 1. INTRODUCCIN
Modelado y simulacin de sistemas con muestreo no convencional
2
En este contexto, el presente trabajo realiza una serie de aportes relacionados con la
sistematizacin del estudio y simulacin de sistemas multifrecuencia a partir de un
modelo nico de propiedades importantes e interesantes (muestreo regular e irregular,
fcil deduccin de casos particulares encontrados en la literatura, posibilidad de offset
en entradas y salidas) y con la aplicacin a sistemas multifrecuencia de mtodos
convencionales de control para sistemas monofrecuencia, muy bien definidos y claros,
pero con explotacin de los grados de libertad adicionales que ofrecen los esquemas
multifrecuencia. Para esto se buscan coincidencias en el planteamiento de los
distintos diseos con el fin de proponer mtodos ms generales. Adems, se
desarrollan y aplican herramientas CACSD (Computer Aided Control Systems
Design) y de simulacin digital (en MATLAB/SIMULINK), que facilitan el proceso
de diseo y estudio del comportamiento de varios mtodos de control.
Por supuesto, quedan algunas preguntas por resolver y otras que no se resolvieron a
total satisfaccin, y que tras el desarrollo de este documento se expondrn. stas se
plantean a modo de recomendacin para futuras investigaciones.
1.2. OBJETIVOS
1.2.1. Objetivo general
Sistematizar el modelado, simulacin y diseo de sistemas de control multifrecuencia
con metodologas claras y precisas, semejantes a la de sistemas convencionales,
partiendo de un modelo que sintetice en gran parte el estado actual de los sistemas
multifrecuencia.
1.2.2. Objetivos especficos
Presentar el estado del arte del control multifrecuencia. Mostrar el desarrollo
histrico del rea de control multifrecuencia en aspectos de modelado y diseo, y
hacer una clasificacin adecuada de las diversas metodologas empleadas, con
miras a la deteccin de concordancias en su evolucin.
Desarrollar un mtodo de modelado de sistemas multifrecuencia que sintetice y
generalice algunos de los mtodos ms conocidos en la literatura y permita el
diseo de reguladores multifrecuencia siguiendo la idea de que a un sistema
multifrecuencia le corresponde una representacin invariable en el tiempo.
CAPTULO 1. INTRODUCCIN
Modelado y simulacin de sistemas con muestreo no convencional
3
Concluir las caractersticas y propiedades del mtodo de modelado obtenido.
Indicar las ventajas y desventajas del nuevo modelo. Mostrar que en efecto el
modelo contiene mtodos de modelado previos, por medio de la obtencin de casos
particulares.
Desarrollar herramientas en MATLAB/SIMULINK para el clculo y simulacin
de sistemas multifrecuencia, que permitan de manera sistemtica y clara el estudio
de las ideas y de los mtodos de diseo propuestos, adems de otros encontrados
en la bibliografa.
Sistematizar el diseo de reguladores multifrecuencia y analizar su aplicabilidad,
propiedades, extensiones y caractersticas. Buscar ideas comunes en varios
mtodos y generalizar su utilizacin. Explotar los grados de libertad adicionales
que ofrecen los esquemas multifrecuencia para efectos del diseo.
Ilustrar con ejemplos las posibilidades de la herramienta desarrollada, mostrando
aspectos relevantes en el modelado y diseo en algunos esquemas especiales de
muestreo
1.3. CONTRIBUCIONES
La principal contribucin es el desarrollo de una serie de herramientas en
MATLAB/SIMULINK (Multirate Control Toolbox) que facilitan y simplifican el
estudio de sistemas multifrecuencia. El Toolbox es interesante e imprescindible en el
trabajo ya que permite: i) el clculo y simulacin hbrida de sistemas multifrecuencia
de una manera muy intuitiva; ii) el estudio de fenmenos como el de las oscilaciones
ocultas; iii) el anlisis de los efectos del muestreo irregular y el offset en entradas y
salidas; iv) la implementacion de diversos esquemas de control; v) el clculo
interactivo de algunos mtodos de control. El Toolbox se puede extender fcilmente a
sistemas peridicos, como se mostrar.
La base de la caja de herramientas (toolbox) desarrolladas es un mtodo que permite
el modelado de sistemas multifrecuencia con mltiples entradas y salidas (MIMO),
aplicable a esquemas de muestreo irregular y con offset en entradas y salidas. Esta
caracterstica hace posible el modelado de sistemas con esquemas de muestreo ms
general, como el caso del muestreo en serie (un solo sensor o actuador aplicado
secuencialmente a varias seales). El muestreo irregular aporta un grado ms de
libertad que es aprovechado, por ejemplo, para el cumplimiento de algunas
condiciones de diseo (por ejemplo, el rango de algunas matrices).
CAPTULO 1. INTRODUCCIN
Modelado y simulacin de sistemas con muestreo no convencional
4
En el diseo se presentan dos mtodos generales de control multifrecuencia
(asignacin de polos y mapeo del modelo) que permiten la aplicacin de los
respectivos mtodos convencionales. Los mtodos han sido presentados de muchas
maneras en la literatura sobre el tema. En el trabajo, el inters de estos mtodos se
concentra en la posibilidad de su integracin con el Toolbox y la aplicacin a cierto
esquema de muestreo, interesante y poco comn, al que se le llam FOLI (ver Fig.
4.4, pgina 80), y el cual da una gran flexibilidad en la seleccin de la dimensin de
todas las matrices del modelo multifrecuencia y mayor libertad en el diseo, adems
de ser til en algunos sistemas de control distribuido donde hay un medio de
comunicacin compartido, de manera que no siempre est disponible la comunicacin
entre el regulador y la planta. El esquema FOLI es posible modelarlo con el mtodo
propuesto en esta tesis y, aunque posiblemente se puede hacer con otros mtodos, no
se encontr en la literatura estudiada. Los reguladores se probaron con diversos
ejemplos, los cuales entregan resultados aceptables en algunos casos, aunque con la
conservacin de un problema muy comn en este tipo de sistemas: el rizado en la
respuesta temporal. Los mtodos se implementan en el Toolbox. La aplicacin al caso
de muestreo en serie merece especial inters (ejemplo 5.4.6).
Al final se presentan algunos ejemplos que aclaran muchos de los conceptos generales
de los sistemas multifrecuencia y, en particular, de los estudiados a lo largo del
documento.
1.4. ORGANIZACIN DEL TRABAJO
El trabajo est organizado de la siguiente forma. En el Captulo 2 se presenta una
breve perspectiva del estado del arte del control multifrecuencia y se desarrollan
conceptos, ideas y mtodos importantes para el trabajo y comprensin del rea en
general, adems de la terminologa que se usar a lo largo del texto. Se hizo una
revisin bastante exhaustiva en diversas bases de datos importantes para hacer una
clasificacin de los distintos temas dentro del rea del control multifrecuencia.
En el Captulo 3 (Modelado) se deduce el modelo multifrecuencia utilizado en el
trabajo como base para la simulacin y el diseo. La deduccin se hace
detalladamente a partir del mtodo de sustituciones progresivas. Se presentan y
discuten algunas propiedades y caractersticas importantes del modelo para efectos
del diseo. Se deducen casos particulares muy comunes en la literatura.
El Captulo 4 (Diseo) presenta un planteamiento general del problema de diseo
utilizando diversas configuraciones (un grado de libertad y dos grados de libertad). A
partir de los distintos esquemas se obtienen varios mtodos de control. Al final se
CAPTULO 1. INTRODUCCIN
Modelado y simulacin de sistemas con muestreo no convencional
5
analizan las caractersticas comunes a ellos. Una vez ms, se trata de mejorar el
comportamiento y las condiciones de diseo con la flexibilidad del muestreo irregular;
es decir, llevando el problema a un manejo matemtico ms sencillo.
En Captulo 5 (Ejemplos y simulacin), se explica la implementacin de las
herramientas de clculo y diseo desarrolladas en MATLAB (Multirate Control
Toolbox) y se aplica a la ilustracin, por medio de ejemplos, de las ideas y mtodos
expuestos en el trabajo. Se compara la herramienta desarrollada con otras
posibilidades de implementacin y se muestran las ventajas del Toolbox finalmente
presentado. Las funciones y bloques de simulacin se utilizan en cada uno de los
ejemplos, mostrando la versatilidad en su manejo y las posibilidades que ofrece para
el estudio de aspectos especficos. Son numerosos ejemplos que complementan la
teora al permitir un mejor anlisis de los resultados. Los ejemplos se discuten de tal
manera que se puede empezar por all el estudio del trabajo y referirse a los aspectos
tericos bsicos en los epgrafes correspondientes. Es por esta facilidad que se
considera el Toolbox en el trabajo como una parte fundamental de ste y que se
seguir mejorando y complementando a medida que se obtengan nuevos mtodos y
metodologas de modelado y diseo. En definitiva, la separacin de ejemplos en un
captulo y su combinacin con el Toolbox permite mostrar el cumplimiento del
objetivo propuesto al iniciar este trabajo: sistematizacin en la aplicacin de las ideas
y de los mtodos presentados en el trabajo.
Al final del trabajo (en las conclusiones) se resumen los principales resultados
obtenidos y el trabajo que se propone para investigar y desarrollar en el futuro, en un
rea que puede pensarse como la generalizacin de los mtodos convencionales de
control, pero que presenta tantos problemas como posibilidades.
CAPTULO 1. INTRODUCCIN
Modelado y simulacin de sistemas con muestreo no convencional
6
Modelado y simulacin de sistemas con muestreo no convencional
7
Captulo 2. Estado del arte
del control multifrecuencia
2.1. INTRODUCCIN
En este captulo se hace una referencia de los aspectos histricos relacionados con el
rea del control multifrecuencia, mostrando los aspectos de modelado y diseo ms
relevantes para el trabajo actual. Se clasifican las diversas metodologas empleadas,
con miras a la deteccin de puntos de tangencia e ideas sobresalientes en su
evolucin.
Se realiza una cuidadosa revisin bibliogrfica, acudiendo a bases de datos disponibles
(muchas de ellas a travs de Internet). Se propone una clasificacin de acuerdo a los
temas tratados en las revistas y memorias de los eventos internacionales de control
ms importantes.
Al final, se especifican los mtodos que sirven de base para la investigacin actual: el
mtodo de operadores de Kranc y el mtodo de Araki - Yamamoto. Estos mtodos se
deducen de una manera muy directa e intuitiva a partir de sustituciones progresivas
y podran ser extendidos al caso de esquemas de muestreo ms generales, como el
muestreo irregular de entradas y salidas. El anlisis de los dos mtodos aporta ideas
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
8
importantes a la deduccin de un modelo ms general de muestreo multifrecuencia
(como se presentar en el siguiente captulo).
2.2. DEFINICIN DE SISTEMA MULTIFRECUENCIA
Un sistema multifrecuencia es un sistema digital en el cual dos o ms variables son
actualizadas a frecuencias distintas. Las variables pueden pertenecer a un mismo lazo
de control (Fig. 2.1) o a diferentes lazos, como en el caso de sistemas multivariables
(Fig. 2.2).
Fig. 2.1 Sistema multifrecuencia SISO
Fig. 2.2 Sistema multifrecuencia MIMO
Los sistemas multifrecuencia son un caso especial de sistemas peridicos (el esquema
de muestreo se repite cada perodo global, igual al mnimo comn mltiplo de los
perodos de muestreo de todas las seales del sistema) o variables en el tiempo, por lo
que muchos conceptos e ideas de estos ltimos son aplicables a aquellos. Por ejemplo,
el mtodo del lifting es concebido para los sistemas peridicos en general. El
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
9
lifting es un mtodo muy utilizado en el modelado de sistemas multifrecuencia y
consiste bsicamente en la obtencin de un modelo monofrecuencia invariable en el
tiempo equivalente del sistema multifrecuencia, pero con mayor nmero de entradas y
salidas que el sistema original (vectores estirados). El proceso de lifting conserva las
operaciones algebraicas en los sistemas, en las normas de seales (picos, potencia,
sumas) y sistemas, en la estabilidad. Sin embargo, el diseo introduce la restriccin
de causalidad en el compensador (epgrafe 4.2).
El control multifrecuencia presenta ciertas propiedades que lo hacen interesante al
momento de disear reguladores digitales de altas prestaciones que tengan en cuenta
las distintas dinmicas de los elementos del sistema. Aunque es posible muestrear un
sistema a la mayor frecuencia posible, sto puede traer problemas numricos y de
resolucin. Adems, como lo han demostrado varios autores, la introduccin
intencionada de esquemas multifrecuencia puede mejorar el comportamiento de un
sistema, en comparacin con la aplicacin de esquemas monofrecuencia.
El concepto de multifrecuencia ha sido utilizado ampliamente en el rea del
procesamiento digital de seales (DSP). All hay un extenso material representado en
artculos, libros y herramientas (por ejemplo, para MATLAB). Una simple consulta
sobre multifrecuencia (Multirate) por Internet o en bases de datos especializadas,
arroja una gran cantidad de fuentes de informacin en el rea del procesamiento
digital, muy superior al rea del control. El presente trabajo no aborda en ningn
sentido este tipo de problemticas.
2.3. APLICACIONES DEL CONTROL MULTIFRECUENCIA
El control multifrecuencia se ha aplicado en diversos entornos y sistemas y por
diferentes razones. A continuacin se presentan algunos casos y ejemplos donde se
han aplicado sus diversos mtodos.
En el control digital de un proceso con una frecuencia de control diferente a la de
medida. Por ejemplo, en sistemas de control de vuelo ([21],[93],[94]), donde el
computador de control hace un muestreo a una frecuencia diferente a la del
subsistema radar; en sistemas robotizados ([67],[58]), donde una videocmara
(sensor) se usa para detectar movimientos a una frecuencia menor que la
requerida para el control (las cmaras de alta frecuencia son muy costosas); en un
sistema de posicionamiento de la cabeza en una unidad de disco de un
computador ([16],[70]), donde la posicin de la cabeza se lee a una frecuencia dada
por la velocidad de rotacin y se desea lograr una respuesta suave adaptando el
actuador de momento de la cabeza a una velocidad mayor; en torres de destilacin
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
10
([59],[63]), donde la estimacin de la composicin se hace a una frecuencia mucho
menor que la estimacin de la temperatura, flujo y presin.
En el modelado ms realista del muestreo [26], como en sistemas con varios
multiprocesadores donde no es correcto considerar que todos ellos estn
sincronizados y trabajan al mismo perodo de muestreo. En este caso es posible
mejorar la respuesta del sistema con un esquema de muestreo multifrecuencia, ya
que es posible distribuir las tareas de control en varios procesadores con
caractersticas diferentes. Si los procesadores no son disparados por un pulso de
reloj comn y sus clculos, muestreo y retencin no estn sincronizados, se tiene el
caso de controladores multifrecuencia asncronos [66] o irregulares [67].
En sistemas multivariables, donde es conveniente disponer de diferentes
frecuencias de muestreo en diferentes lazos (el ancho de banda de sensores y
actuadores es muy diferente) para reducir la carga de clculo del computador y
dejar ms tiempo para otras tareas (supervisin, por ejemplo), mejorar la
precisin y disminuir los costos (los computadores y sensores de menor frecuencia
son ms baratos). Restricciones en los sensores y actuadores hacen que no sea
posible muestrear a la mxima frecuencia. Ver, por ejemplo, [33],[44] y [82].
En sistemas donde se desee mejorar las especificaciones temporales o frecuenciales
de un proceso (sobreimpulso, tiempo de establecimiento, oscilaciones ocultas,
mrgenes de fase y ganancia, sensibilidad, rechazo de perturbaciones), la
controlabilidad o la observabilidad. Un controlador multifrecuencia es en general
variable en el tiempo, con las respectivas ventajas como mejoramiento del margen
de ganancia, estabilizacin simultnea, control descentralizado, mapeo del modelo,
reduccin de la sensibilidad, rechazo de perturbaciones, entre otras (ver, por
ejemplo, [8],[7],[42]).
En el diseo, ya que se tiene mayor libertad para la implementacin de
reguladores como: asignacin de polos y ceros, mapeo del modelo, estabilizacin
simultnea, estabilizacin con mrgenes de ganancia arbitrariamente grandes,
control descentralizado.
En [8] se da una detallada explicacin de las ventajas directas del control
multifrecuencia. Es interesante resaltar que el control multifrecuencia ha sido
utilizado en diversas reas y sistemas como: robots, discos duros, avinica, columnas
de destilacin, reactores, procesadores, deteccin de fallos, industria del polister,
submarinos, sistemas elctricos, gas, PVC, sistemas neumticos y motores. En
revistas y memorias de eventos se encuentran ms de 80 artculos con referencia clara
y directa a la aplicacin del control multifrecuencia [16]. En las figuras que aparecen
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
11
a continuacin se muestran algunas de las aplicaciones directas que se encontraron en
la bibliografa.
Fig. 2.3. Aplicacin del control multifrecuencia
en robtica
Fig. 2.4. Aplicacin del control multifrecuencia a
procesos industriales
El control multifrecuencia aplicado al sistema de la Fig. 2.3 (control de posicin y
fuerza en un manipulador robtico, [10]), donde las medidas de la posicin y la fuerza
se toman a diferentes frecuencias, mejorando la estabilidad y permitiendo un mejor
uso de los recursos de cmputo.
Un regulador multifrecuencia autosintonizado aplicado a la planta multivariable (dos
entradas y dos salidas) de la Fig. 2.4 (columna de destilacin, [77]) proporciona un
mejor desempeo que estrategias PI y PID, para el caso cuando existe una
perturbacin en el flujo de alimentacin. En el caso multivariable (se consideran las
interacciones entre los diferentes lazos) no siempre es satisfactorio considerar un solo
perodo de muestreo, ya que algunas variables se miden con un analizador y dichas
medidas pueden tardar un tiempo mayor que la constante de tiempo dominante del
proceso (puede ser de horas). Muestrear todas las variables a dicho perodo puede
degradar el comportamiento del sistema.
En la Fig. 2.5 (vehculo con un remolque, sistema no holonmico, [14],[55]) se aplica
el control multifrecuencia a un problema de planificacin del movimiento. Dicho
control se calcula e implementa de una manera sencilla (normalmente slo se requiere
de la inversin de matrices) y permite una gua exacta de un estado inicial a un
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
12
estado final. En el sistema se combina la realimentacin multifrecuencia con la
planeacin de la ruta para ir de un punto a otro, paso por paso. El muestreo
multifrecuencia es introducido intencionalmente para lograr varios objetivos de
manera simultnea: regulacin, estabilizacin, desacoplamiento, seguimiento,
cancelacin de ceros inestables, linealizacin.
Fig. 2.5. Aplicacin del control multifrecuencia a
vehculos terrestres
Fig. 2.6. Aplicacin del control multifrecuencia a
sistemas de polimerizacin
La Fig. 2.6 corresponde a un sistema de enfriamiento de un reactor (produccin de
PVC, [34]). Junto con un controlador predictivo basado en el modelo se utiliza un
muestreo multifrecuencia, el cual permite una compensacin rpida de los efectos de
las perturbaciones y una capacidad para reflejar el efecto de las restricciones futuras
en el control actual mientras se mantiene una complejidad computacional factible. La
seleccin de los perodos de muestreo debe reflejar un compromiso entre la capacidad
del controlador para compensar los efectos de las perturbaciones (muestreo rpido) y
la capacidad para predecir la parte relevante de la trayectoria del proceso (muestreo
lento), necesaria para incorporar restricciones futuras (por ejemplo en la capacidad de
enfriamiento). Un esquema de muestreo irregular se usa para preservar los nodos en
los cuales las trayectorias discretizadas son evaluadas, para los diseos de control
subsecuentes (el perfil de control es reutilizable entre las iteraciones, lo cual acelera el
tiempo de clculo).
Al sistema de la Fig. 2.7 (servo-sistema electro-neumtico, [74]) se le aplica un control
adaptativo por modelo de referencia (MRAC) multifrecuencia, ya que la planta es de
fase no-mnima y el MRAC convencional no es aplicable. Se adopta un operador
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
13
delta. La efectividad del diseo se corrobora con las pruebas experimentales
realizadas.
Fig. 2.7. Aplicacin del control multifrecuencia a
sistemas neumticos
Fig. 2.8. Aplicacin del control multifrecuencia a
la avinica
En el sistema de la Fig. 2.8 (simulador de vuelo de laboratorio, [93]) se aplica un
regulador esttico MROC (ver epgrafe 3.5.7) a un sistema inestable. Dicho regulador
mantiene el desempeo que se logra con un regulador de realimentacin del estado. El
uso de observadores de estado en este ltimo caso conlleva a una degradacin del
comportamiento en lazo cerrado e incluso a la prdida de condiciones como la
estabilidad simultnea. El sistema es linealizado alrededor de un punto de operacin
nominal y dos puntos de operacin de posibles fallos. El controlador permite un
seguimiento rpido y sin sobreimpulso de cambios tipo escaln, con el cumplimiento
de las restricciones en las seales de control y los estados.
A pesar de las numerosas aplicaciones que ha tenido en los ltimos aos el control
multifrecuencia, sus ventajas reales sobre los sistemas monofrecuencia es un tema
actual de discusin. En particular, debido a las diferentes escalas de tiempo es
delicado definir apropiadamente normas para la comparacin del comportamiento.
Muchos autores han afirmado que el control multifrecuencia puede tener problemas
de sensibilidad y robustez [56]; adems, la seal de control puede tomar valores muy
altos y con cambios bruscos que pueden llevar a problemas de oscilaciones ocultas y a
un mal condicionamiento del modelo multifrecuencia.
No obstante las dificultades encontradas, cada da se van superando los obstculos y
se proponen estrategias ms acordes con los problemas reales de control. Por ejemplo,
en [36] y [59] se muestran las claras ventajas de un regulador multifrecuencia sobre la
versin monofrecuencia.
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
14
2.4. ASPECTOS HISTRICOS DEL MODELADO DE SISTEMAS
MULTIFRECUENCIA
Desde sus inicios en 1955 se han propuesto y utilizado diversas tcnicas para el
anlisis y diseo de sistemas multifrecuencia, esencialmente para el estudio del
comportamiento intermuestreo o debido a las diferentes constantes de tiempo internas
de los sistemas dinmicos en consideracin ([8],[13],[27]). En los primeros trabajos el
sistema multifrecuencia se descompona en sistemas monofrecuencia y se aplicaban
tcnicas clsicas de anlisis y diseo (bsicamente la transformada Z modificada). La
primera tcnica de anlisis de sistemas multifrecuencia se conoce como
descomposicin frecuencial y fue desarrollada por Sklansky y Ragazzini en 1955 [72].
Una filosofa alternativa se conoce como descomposicin de interruptores y fue
presentada por Kranc en 1957 [45]. Jury en 1967 [40] demostr que los dos enfoques
anteriores eran equivalentes. Otros autores que siguieron esta lnea fueron Whitbeck y
Didaleusky [94], quienes 23 aos ms tarde (en 1980), al introducir vectores en la fase
de modelado (descomposicin vectorial de interruptores), facilitaron la manipulacin
de los diagramas de bloques, adems de permitir el anlisis de sistemas con muestreo
irregular (se interesaron en sistemas de vuelo). Las tcnicas de descomposicin se
describen brevemente en el epgrafe 2.6.1 y con ms detalle en [13].
Todos los mtodos anteriores son aplicados en el dominio de la frecuencia y son muy
difciles de aplicar por sus extremas complejidades matemticas; adems, no
relacionan ninguna funcin de transferencia al sistema. En 1986 Thompson ([75],[79])
presenta una tcnica, conocida como mtodo de los operadores de Kranc, que soslaya
estos inconvenientes al permitir, mediante la introduccin de los llamados operadores
de Kranc, el estudio sistemtico de la descomposicin de conexiones y su adecuada
implementacin por computador. El mtodo de los operadores de Kranc es un mtodo
matricial basado en la ecuacin de estado del sistema SISO.
El enfoque temporal fue introducido por Kalman y Bertram en 1959 [41], pero se
desarroll poco hasta los trabajos de Barry [11] en 1975, Amit [3] y Broussard y
Glasson [12] (aplicacin a sistemas de vuelo) en 1980, en los cuales se aplic el
muestreo multifrecuencia al diseo de controladores ptimos. Barry describe el diseo
de un regulador multifrecuencia y muestra que su comportamiento es superior a un
regulador monofrecuencia con la misma frecuencia base.
En 1975 Meyer y Burrus [48] analizan los sistemas peridicos y sistemas
multifrecuencia a partir de una representacin equivalente invariable en el tiempo.
Este enfoque sera adoptado por la mayora de autores en diversas formas, como se
muestra a continuacin.
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
15
El mtodo de sustituciones progresivas (1986) es utilizado por Araki y Yamamoto [6]
para el modelado sistemas MIMO y simplifica algunos de los problemas de los
enfoques anteriores. El modelo es de gran dimensin, con vectores ampliados de
estado, entradas y salidas. Este modelo fue restringido a un sistema con igual nmero
de entradas y salidas y a una configuracin de retroalimentacin desacoplada
utilizando compensacin esttica. En 1990 Godbout, Jordan y Apostolakis [28]
desarrollaron un modelo para un sistema de control en lazo cerrado que incorpora
muestreo multifrecuencia con compensacin dinmica, pero su dimensin es an
mayor que la del modelo de Araki - Yamamoto. Ms tarde, en 1991, Apostolakis y
Jordan [3] redujeron las dimensiones de dicho modelo de una manera informal.
Los primeros estudios acerca de la implementacin de reguladores multifrecuencia en
procesadores los realizan Knowles y Edwards en 1965 [42]. En ellos se estudian efectos
de cuantificacin y seleccin de la frecuencia de muestreo a partir de la
descomposicin frecuencial de interruptores. En 1986 se muestra una aplicacin del
control multifrecuencia al control de manipuladores flexibles [43]. En 1987 Jordan y
Godbout [39] aplican el muestreo multifrecuencia en la seleccin ptima del perodo
de muestreo de un proceso.
Alrededor de los aos de 1986 a 1989 se comienza a ver un auge en la teora y
aplicacin del control multifrecuencia, debido seguramente a la aparicin de modelos
ms fciles de aplicar en un ordenador y procesadores ms rpidos. Se concentra el
estudio en las propiedades y caractersticas de los mtodos de modelado propuestos y
en el diseo directo de reguladores.
En 1990 David G. Meyer [52] demostr que un sistema multifrecuencia cae dentro de
un caso especial de operador, el cual l introduce y llama shift-varying operator.
Este operador generaliza el concepto de periodicidad. Adems, para ese operador
existe un operador equivalente shift-invarying operator, el cual conserva todas las
propiedades algebraicas y analticas del sistema multifrecuencia original (en su
artculo, se analiza el caso particular de la estabilidad BIBO). Desde la perspectiva de
este nuevo operador, las diferentes representaciones de sistemas multifrecuencia son
equivalentes e incluso Meyer obtiene una generalizacin del operador de Kranc a
sistemas MIMO. El mismo Meyer [50] propuso dos aos antes un mtodo CAD
(Diseo Asistido por Computador) para el diseo de reguladores multifrecuencia, con
el cual pretende hacer ms eficiente y natural dicho proceso. El mtodo tiene como
base la representacin invariable en el tiempo de los sistemas multifrecuencia, la
parametrizacin de Youla de reguladores ([96],[20]) y el uso de un lenguaje de
especificacin de control.
Es interesante la aplicacin de modelos multifrecuencia a sistemas monofrecuencia
convencionales o con una relacin explcita entre la representacin externa e interna.
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
16
Albertos en 1990 [1] desarroll un mtodo (BMIO, Block Multirate Input - Output
Model) que permite una representacin en ecuaciones en diferencias (con bloques de
entradas y salidas) de plantas y reguladores multifrecuencia. Sus beneficios, como la
posibilidad de aplicacin de horizontes mviles, se han expuesto en trabajos
posteriores [2].
Un caso de inters en los ltimos aos es el caso del muestreo multifrecuencia
irregular. Aunque varios autores han tratado el tema, es un campo poco explorado.
Entre los trabajos ms importantes en el tema estn los realizados por Salt y
Albertos ([67],[68],[69], [2]). En el ltimo trabajo [2] se utiliza de una manera bastante
directa el muestreo irregular y se estudia la incidencia del esquema de muestreo en la
controlabilidad y el diseo de reguladores (se explota el horizonte recesivo). La
utilidad del muestreo irregular se observa en sistemas como el de la Fig. 2.6 (pgina
12, referencia [34]) con el fin de acelerar el tiempo de clculo.
En estos enfoques es comn la representacin por medio de una ecuacin de estado
invariable en el tiempo (LTI) y ampliada del sistema multifrecuencia. La ecuacin
est dada a un perodo global T
o
, igual al mnimo comn mltiplo de todos los
perodos de muestreo existentes en el sistema y contiene ms entradas y salidas que el
sistema original (el estado se actualiza normalmente cada perodo global, aunque
algunos autores han propuesto mtodos con medidas intermedias [24]). Este enfoque
se conoce como lifting (estiramiento). El concepto del lifting es bsico en el
trabajo de Kranc, Araki-Yamamoto, Meyer-Burrus y otros. El mtodo fue
desarrollado inicialmente en 1985 por Khargonekar [42]. Una descripcin del mtodo
se encuentra en [75] y [76]. Varios autores ([47],[52]) han mostrado que esta
representacin conserva muchas de las propiedades del sistema multifrecuencia
original (alcanzabilidad, controlabilidad, observabilidad, estabilidad, picos, potencia
de seales, sumas de seales, lgebra de bloques, etc.). En [47] se analizan las
condiciones de alcanzabilidad, controlabilidad y observabilidad de sistemas
multifrecuencia a partir de la teora de los sistemas peridicos y se muestra como un
sistema multifrecuencia se puede representar con un modelo linear peridico variable
en el tiempo y como pasar a una representacin lineal invariable en el tiempo. Se
concluye que la estabilidad, alcanzabilidad, controlabilidad y observabilidad del
sistema multifrecuencia se puede concluir tanto de la representacin peridica como
de la invariable en el tiempo. Algunos teoremas especifican las condiciones para
conservar dichas caractersticas.
El enfoque temporal en variables de estado es el mtodo preferido para el modelado
de sistemas multifrecuencia, debido a la reduccin de este tipo de sistemas a
representaciones invariables en el tiempo que amplan el nmero de entradas y salidas
del sistema (sistemas MIMO). Es importante indicar que no es posible obtener una
representacin externa para los sistemas multifrecuencia [84], exceptuando el caso de
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
17
esquemas MRIC (Multirate Input Control, ver epgrafe 3.5.4). Los esquemas de
muestreo MRIC y MROC (Multirate Output Control, ver epgrafe 3.5.7) para
sistemas MIMO son muy estudiados en la bibliografa ([7],[31],[32]). Esta terminologa
se ha impuesto para clasificar este tipo especial de sistemas, pudindose extender a
sistemas SISO, con preferencia sobre las expresiones N-delay Input y N-delay
Output.
Una descripcin ms detallada de algunos de los mtodos citados anteriormente se
encuentra en el trabajo de Camia [13].
2.5. MTODOS DE CONTROL MULTIFRECUENCIA
A continuacin se hace una clasificacin por tema de los principales mtodos
encontrados en la bibliografa y que nos pueden dar una idea del estado del arte del
diseo de reguladores multifrecuencia.
La metodologa utilizada para dicha clasificacin se presenta a continuacin. Se
recurri a Internet para tener acceso a las bases de datos de las principales revistas y
memorias de eventos de control en el mundo. Adems, se utilizaron bases de datos
como ProQuest y un detenido seguimiento de las referencias bibliogrficas de muchos
de los artculos ledos. Se obtuvo una muestra bibliogrfica con 380 artculos de
revistas y eventos, que puede ser bastante representativa (no se incluyen todas las
referencias en este trabajo, pues no todas son soporte para el mismo). No se
incluyeron proyectos y tesis. Se trat de eliminar artculos relacionados entre s (por
ejemplo, un trabajo presentado en un evento y luego publicado en una revista). Se
tuvo acceso al texto completo de 230 artculos (61%).
Las revistas consultadas desde sus inicios fueron, entre otras:
IEEE Transactions on Automatic Control
IEEE Transactions on Control Systems Technology
IEEE Control System Magazine
Automatica
Control Engineering Practice
Anual Reviews in Control
International Journal of Control
IEE Proceedings on Control Theory and Applications
European Journal of Control
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
18
Journal of Dynamic Systems, Measurement and Control
Journal of Dynamical and Control Systems
Journal of Guidance, Control and Dynamics
Journal of Process Control
SIAM - Journal on Control and Optimization
Se pudo consultar bases de datos con las memorias de prestigiosos eventos de control
en el mbito mundial como:
IEEE Conference on Decision and Control
American Control Conference
European Control Conference
IEEE Conference on Control Application
IFAC World Congress
Asian Control Conference
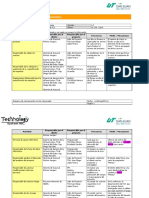
En la TABLA 2.1 se muestran los temas ms tratados en la bibliografa analizada. La
clasificacin se hizo con base en el ttulo y/o resumen del artculo y, en muchos casos,
en el texto completo. Si se trataban varios temas se hizo la clasificacin por el aspecto
ms relevante. Obviamente, la clasificacin puede estar sujeta a algunas omisiones.
En general, de dicha tabla y de un estudio detallado de los artculos, se puede
concluir lo siguiente:
La mayor cantidad de resultados se han obtenido en el rea de control ptimo.
Hay una buena cantidad de artculos (24%) dedicado a aspectos de aplicacin del
control multifrecuencia en reas muy diversas.
En el diseo se parte de modelos particulares. El diseo aplicado al caso general
de muestreo es poco tratado, pero sobresalen mtodos basados en la
parametrizacin de Youla ([52],[96],[20]).
El modelo de muestreo ms utilizado es el MRIC (ver epgrafe 3.5.4), debido a que
la condicin de causalidad (Definicin 4.1) se cumple sin ningn problema (los
trminos directos en el compensador tienen la forma triangular inferior por
bloques). Es un esquema muy frecuente en sistemas reales y es posible ubicar
arbitrariamente los polos y ceros de fase no-mnima de la planta [56].
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
19
TABLA 2.1. MTODOS DE CONTROL MULTIFRECUENCIA ENCONTRADOS EN LA
BIBLIOGRAFA
TEMA CANTIDAD
Estado del arte 3
Modelado y anlisis 49
Muestreo irregular 3
Muestro asncrono, aperidico 9
CACSD 6
Estimacin 17
Rediseo, Discretizacin 10
Control ptimo 45
Control adaptativo 23
Control no lineal 10
Control robusto 26
Control descentralizado 4
Control predictivo 11
Asignacin (polos, ceros, estructura) y cancelacin 21
Mapeo del modelo (model matching) 7
Aspectos de diseo (desacoplamiento de perturbaciones, MROC,
MRIC, estabilizacin, parametrizacin, SLC, intermuestreo)
34
Control inteligente 3
Aplicacin (robtica) 18
Aplicacin (disco duro) 13
Aplicacin (vuelo) 12
Aplicacin (columna de destilacin) 7
Aplicacin (reactores) 10
Aplicacin (Procesador, deteccin de fallos, PWM) 11
Aplicacin (polister, submarinos, sistemas elctricos, gas, PVC,
sistemas neumticos, motores)
19
El control multifrecuencia en esquemas de muestreo MRIC presenta problemas de
rizado. Este es uno de los temas de ms inters terico. Su anlisis y solucin se
ha planteado de diversas maneras, entre las que se incluye el uso de integradores y
filtros. Una excelente descripcin y explicacin de este problema se encuentra en
[75].
El caso de diseo a partir de modelos MROC (ver epgrafe 3.5.7) se resuelve con
la actualizacin de las seales de control cada perodo global (se cumple con la
condicin de causalidad introduciendo un retardo de un perodo global en la
actualizacin de las entradas:
(( 1) ) ( ) ( )
D
o o o
k T kT kT + = - Cx y Gu . Es decir, la
accin de control aplicada en el inicio de un horizonte o perodo global dado
depende de las entradas en el horizonte anterior. Ver epgrafe 3.5.7.
En general, la restriccin de causalidad es garantizada de varias maneras:
discretizando reguladores continuos, recurriendo a esquemas MRIC, utilizando la
parametrizacin de Youla o parametrizacin Q ([96],[20],[51]), usando operadores
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
20
anidados (nest operators) [62], usando precompensadores antes de la planta.
Todas las polticas sugeridas se pueden agrupar en dos clases [8]: una poltica
constructiva (uso de compensadores correctos) y una poltica analtica
(parametrizacin de Youla). Este tema se trata con mayor profundidad en el
epgrafe 4.2.
Siempre es posible garantizar la ubicacin de polos y ceros con reguladores
estticos multifrecuencia, aunque puede haber una degradacin en el
comportamiento.
Existe poca bibliografa acerca del control con muestreo irregular. No se explota la
irregularidad del muestreo (grado de libertad adicional) para el cumplimiento de
aspectos como el comportamiento intermuestreo, condicionamiento y rango de las
matrices, diseo en general, etc.
2.6. REVISIN DE MTODOS DE MODELADO DE SISTEMAS
MULTIFRECUENCIA
Los siguientes mtodos sirven de fundamento al modelo planteado en este trabajo. Al
presentarlos se pretende introducir algunas de las ideas y terminologa. Por supuesto
que existen muchos otros mtodos y estrategias. Algunos de estos mtodos se
obtienen y describen en el Epgrafe 3.5, como casos particulares del mtodo general
obtenido en el presente trabajo.
2.6.1. Descomposicin frecuencial o de interruptores
En este mtodo se modela un muestreador como una combinacin de muestreadores
ms lentos puestos en paralelo. En general, se convierte un muestreador de perodo
N T
o
/ (N es un nmero natural) en N muestreadores de perodo T, tal y como se
muestra en la Fig. 2.9.
En la Fig. 2.9, T
o
es el perodo global del sistema, igual al mnimo comn mltiplo de
todos los perodos de muestreo en el sistema:
1 2
m.c.m.( , ,...)
o
T T T =
(2.1)
Una vez hecha la descomposicin de cada muestreador, el anlisis se hace aplicando la
transformada Z modificada. Es importante anotar que con esta tcnica se obtiene la
salida, pero no una funcin de transferencia que relacione la salida con la entrada.
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
21
Debido a la complejidad de los clculos, este mtodo no se aplica con frecuencia. Sin
embargo, su idea ayuda a comprender los otros mtodos. Ntese que el sistema
multifrecuencia se lleva a un sistema monofrecuencia invariable en el tiempo a
perodo global. Esta idea original permanece en la mayora de los mtodos de
modelado multifrecuencia analizados en la literatura.
Fig. 2.9. Descomposicin frecuencial
2.6.2. Operadores de Kranc
Este mtodo permite el estudio sistemtico de la descomposicin de interruptores, a
partir de la descripcin matricial del sistema (ecuaciones de estado).
Sea el sistema que se muestra en la siguiente figura.
El sistema continuo ( ) s G se discretiza en un esquema multifrecuencia para obtener
( )
o
T
z G
( ) s
=
A B
G
C D
y ( )
To
z
=
A B
G
C D
% %
% %
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
22
El modelo multifrecuencia tiene la siguiente forma:
1 1 1
2 2 2
(( 1) ) ( ) ( )
0, 1, 2, 3, ...
( ) ( ) ( )
donde,
1
1
D
o o o
D
o o o
T
D
o o o o
T
D
o o o o
k T kT kT
k
kT kT kT
(kT ) u(kT ) u(kT T ) u(kT (N )T )
(kT ) y(kT ) y(kT T ) y(kT (N )T )
+ = +
= +
= + + -
= + + -
x Ax Bu
y Cx Du
u
y
% %
% %
%
L
L
(2.2)
( ) s G es la cudruple asociada al sistema en variables de estado y ( )
To
z G es la
cudruple del sistema digital multifrecuencia a perodo T
o
(operador de Kranc). T
o
/m
es el perodo del muestreador de entrada; T
o
/n es el perodo del muestreador de
salida; T
o
/k es el perodo bsico (m.c.d.).
El operador de Kranc trabaja con la ecuacin de estado del sistema, discretizada al
mximo comn divisor (m.c.d.) (T = T
o
/k), aunque se define para el mnimo comn
mltiplo (T
o
). El operador de Kranc es una ecuacin de estado que considera las
salidas a perodo
2
T y las entradas a perodo
1
T . Para ello convierte N
1
entradas
espaciadas cada T
o
/N
1
segundos en N
1
entradas en un instante
o
kT (proceso de
vectorizacin); adems, convierte N
2
salidas calculadas en un instante
o
kT en
2
N
salidas espaciadas cada
2
o
T N segundos (proceso de reduccin). La esencia del
trabajo con los operadores de Kranc est en el clculo de la cudruple
A B C D
% % % %
y de la vectorizacin de la entrada. De ah en adelante se trabaja con la ecuacin de
estado a perodo T
o
como es habitual. Al final, se aplica un proceso de reduccin
sobre la salida.
Fig. 2.10 Interpretacin de los procesos de vectorizacin y reduccin
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
23
Existen varios tipos de operadores de Kranc ([78], [79]), segn el tipo de cudruple
original que se tenga (continua o discreta). Por ejemplo, el ZOH Kranc corresponde al
siguiente sistema:
El respectivo operador de Kranc es:
( 1) ( 2)
1 11 12 1
1 2
...
...
( )
: : : : :
...
k k
m m
k
m m
To
m
n nm
n n
D D D
z
D D D
- -
=
A A XB A XB XB
C
G
C
(2.3)
donde,
1 ( 1)
2
1
0
...
( )
, si ( 1) ( 1) 0
, en otro caso
, si 0 1 1
0 , en otro caso
k k
i
m n
i
k
m
ij ij ij
q
l
ij
ij
D q
k k k
l q i j
n m m
k k k
D (i ) - (j - ) <
n m m
- -
-
=
= + + + + =
= Y + W
= + - - - -
Y =
-
W =
X I A A A C CA
C B
A
0
(2.4)
Esta representacin se seguir a lo largo del trabajo, mostrando la clara extensin de
este mtodo al muestreo irregular y sistemas MIMO.
2.6.3. Mtodo de Araki - Yamamoto
En 1986 Araki y Yamamoto [6] desarrollaron un modelo interno multifrecuencia para
sistemas MIMO. Este mtodo da la base terica sobre la cual se pueden desarrollar
los mtodos modernos de diseo. Para su deduccin asumieron un sistema
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
24
estrictamente propio ( D = 0 en la ecuacin de estado), un regulador esttico, un
nmero de entradas igual al de las salidas y un muestreo regular de las variables con
utilizacin de retenedores de orden cero. Para la deduccin del modelo de Araki -
Yamamoto se utiliza el mtodo de sustituciones progresivas. El sistema que se estudia
se da en la Fig. 2.11.
Fig. 2.11 Sistema considerado por Araki - Yamamoto
En este mtodo se parte de la siguiente ecuacin de la planta MIMO:
= +
= +
x Ax Bu
y Cx Du
(A, B, C) es un sistema controlable y observable, n es el orden del sistema y p el
nmero de E/S. Se asume que la planta est precedida por retenedores de orden cero
(ZOH). El mtodo nos lleva a una ecuacin de estado monofrecuencia (semejante a la
del mtodo de Kranc) a perodo global
1 2
m.c.m.( , ,...)
o
T T T = en lazo abierto:
1 2 1
(( 1) ) ( ) ( )
( ) ( ) ( )
donde,
[ ]
D D
o o o
D D
o o o
D D D D D D D
k T kT kT
kT kT kT
+ = +
= +
= = = + = +
D
D
x Ax Bu
y Cx Du
A A B B C C L A L D C L B D
% %
% %
% % % %
(2.5)
En el modelo, n es el orden del sistema, p el nmero de entradas y salidas, T
i
es el
perodo de muestreo de cada variable, T es el mximo comn divisor de todos los
perodos,
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
25
1
...
o o
p
i
i
T T
N T N N N
T N
= = = + +
Las matrices (
1 2
, , , ,
D D D
A B C L L ) y los parmetros se definen en el artculo de Araki
- Yamamoto. El superndice D en los vectores indica que es un vector estirado
(coleccin de todos los valores de la respectiva variable, a su intervalo de muestreo,
durante el perodo T
o
). La matriz
D
D tiene la forma dada en la ecuacin (2.6). En el
artculo mencionado D = 0 ; los resultados que aqu se presentan son una
generalizacin de los que all se presentan [88].
,
,
[ ], , 1, 2, ...,
[ ], 0 1 1
0 1 1
, 1
0 en otro caso
D D
ij
D D
ij ij i
j
ij j j j
D
ij
i j p
d , ,..., N
, ,..., N
d l l ( )l
d
= =
= = -
= -
< +
D D
D
(2.6)
Dimensiones de las matrices en el modelo de Araki - Yamamoto:
, , ,
Nn Nn Nn N N Nn N N
A B C D
% % % %
(2.7)
El anlisis de sistemas SISO con esta metodologa es difcil de tratar y requiere de la
introduccin de muestreadores ficticios (como se muestra en el artculo original de
Araki y Yamamoto) hasta completar un sistema de dos entradas y dos salidas. La
razn es que en esta metodologa (con un nmero de entradas igual al nmero de
salidas) a una entrada con un perodo dado le corresponde una salida con el mismo
perodo. Si el sistema tiene una entrada (perodo T
1
) y una salida (perodo T
2
) con
diferentes perodos, es necesario introducir una entrada (perodo T
2
) y una salida
(perodo T
1
) para completar las condiciones del modelo. Siguiendo la misma idea, se
podra extender el modelo al caso de un nmero de entradas diferente de las salidas.
Este modelo sirvi de base para el desarrollo de otros mtodos, como el de Godbout,
Jordan y Apostolakis ([28],[4]).
CAPTULO 2. ESTADO DEL ARTE DEL CONTROL MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
26
2.7. RESUMEN DEL CAPTULO
En este captulo se present el estado del arte del modelado y control de sistemas
multifrecuencia. Se observa que la mayora de mtodos de modelado actuales para los
sistemas peridicos (entre ellos los sistemas multifrecuencia) utilizan representaciones
en variables de estado, de tiempo discreto e invariables en el tiempo, con ms
entradas y salidas que el sistema original. Esta preferencia se debe a la posibilidad de
aplicar mtodos de control diseados, estudiados y probados adecuadamente para
sistemas monofrecuencia. Utilizando una terminologa muy difundida en la literatura,
se agrupar este tipo de mtodos bajo el trmino de lifting, que podra traducirse
como estirado. El sistema obtenido se denominar lifted system (sistema
estirado). El trmino estirado hace referencia al estiramiento de entradas y salidas
a la que se llega al convertir el modelo del sistema a un modelo de tiempo discreto
invariable en el tiempo.
Al final del captulo se plantean tres modelos basados en sustituciones progresivas
que sirven de base al modelo que se obtiene y analiza en el siguiente captulo e
introduce la terminologa e ideas bsicas del presente trabajo.
Se logr determinar que: i) el modelado irregular es poco explotado y analizado en la
literatura; ii) faltan herramientas de clculo y simulacin de sistemas multifrecuencia
que faciliten la comprensin y anlisis de stos; iii) existen muchos mtodos de
modelado (que podran ser resumidos en uno solo); iv) muchos mtodos de control
parten de un modelado y anlisis especfico que podra obviarse de utilizar un mtodo
general; v) los problemas ms preocupantes del control multifrecuencia son la
restriccin de causalidad y el rizado; vi) es recomendable dar respuestas sistemticas
a muchos de los problemas del rea de los sistemas multifrecuencia.
Modelado y simulacin de sistemas con muestreo no convencional
27
Captulo 3. Modelado
multifrecuencia
3.1. INTRODUCCIN
Los mtodos de modelado expuestos en el captulo anterior se aplican a sistemas
multifrecuencia con muestreo regular (es decir, aunque cada variable puede
muestrearse con un perodo arbitrario, ste es constante). En el presente captulo se
expone la generalizacin de los resultados mencionados anteriormente para el caso de
sistemas multifrecuencia con mltiples entradas y salidas, con muestreo irregular o no
uniforme (cada variable se muestrea arbitrariamente durante el perodo global como
se muestra en la Fig. 3.2) y sin sincronizacin de entradas y salidas cada perodo
global (sin embargo, la secuencia se repite en dicho perodo). El caso de muestreo
irregular ha sido explorado muy poco; uno de los trabajos ms interesantes en este
campo es el realizado por Salt ([67],[68],[69]), quien estudia y modela el caso
particular de un sistema SISO en el que la salida se muestrea cada perodo global T
o
,
mientras que la entrada se muestrea N veces de manera irregular en dicho intervalo.
En [2] se hace una generalizacin al caso de sistemas MIMO con muestreo irregular
(dentro del mtodo BMIO [1]), pero con sincronizacin de las entradas cada perodo
global.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
28
El muestreo irregular es til al dar un grado de libertad adicional en el diseo de
reguladores y al permitir un modelado ms realista del muestreo de las seales.
En el modelado multifrecuencia general se pueden introducir entradas y salidas
adicionales para alcanzar ciertas propiedades deseadas: rango de las matrices,
matrices de dimensiones deseadas (por ejemplo cuadradas, con la posibilidad de
inversin exacta), condicin para la asignacin de polos, etc. De esta manera, adems
de ajustarse a unas condiciones dadas (variables con diferente dinmica), se puede
explotar dicha libertad en el muestreo para conseguir ciertos objetivos. En el
muestreo irregular se puede utilizar, adems de lo anterior, la secuencia de muestreo
para otros objetivos (se puede proponer dicha secuencia como parmetro de diseo).
En general, las ventajas del muestreo irregular (adems de una representacin ms
realista del muestreo) no han sido suficientemente definidas en la escasa bibliografa
del tema. Queda un gran camino por recorrer. Una aproximacin a las ventajas se
tratar de definir en este trabajo.
Se considera en el presente trabajo un sistema multifrecuencia irregular de orden n
con m entradas y p salidas, tal y como se muestra en la Fig. 3.1. En la Fig. 3.2 se
ilustra un caso del muestreo irregular a estudiar, donde no hay sincronizacin de
entradas y salidas cada perodo global (se llamar offset a este desfase de las entradas
y salidas).
Fig. 3.1 Sistema con muestreo irregular considerado en el trabajo
Fig. 3.2 Esquema de muestreo irregular (con offset) considerado en el trabajo
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
29
En la Fig. 3.1 y
i j
T T
%
representan esquemas o secuencias de muestreo,
posiblemente irregular. La Fig. 3.2 es un ejemplo de la posibilidad de dicho muestreo.
Se observa la irregularidad del muestreo y la presencia de offset de la entrada
j
u y la
salida
i
y (
1
0 0
i j
l , l
%
). El offset es el lapso de tiempo entre el instante de
muestreo global y la primera muestra de una seal y se refiere a la posibilidad de que
las entradas y salidas puedan no estar sincronizadas cada perodo global. El esquema
general se repite cada perodo global.
En el trabajo se obtiene y trabaja con una representacin interna. No es posible, en
general, obtener la funcin de transferencia de un sistema multifrecuencia ([84],[5]).
Slo es posible obtener la funcin de transferencia en el caso de un esquema de
muestreo MRIC. La razn es simple: cuando slo se expanden las entradas de la
planta (esquema MRIC) es posible construir las seales de salida como el producto de
un vector de entradas (correspondiente a una entrada estirada) por la matriz de
funciones de transferencia; la operacin es completamente lineal. En el caso cuando se
expanden las salidas (por ejemplo, en esquemas MROC), la salida no se puede
reconstruir a partir de las salidas estiradas como una simple superposicin de seales.
La salida se puede obtener como la suma de sus diferentes componentes, pero no se
pueden separar las entradas de las funciones de transferencia (ver [28], [6]).
3.2. NOTACIN DE PARMETROS E NDICES
Como puede verse en la Fig. 3.1, se considera un sistema de m entradas y p salidas,
muestreo irregular, sin sincronizacin de las entradas y salidas cada perodo global
(esquema de muestreo arbitrario). La notacin que se utiliza en el modelo se presenta
a continuacin (se sigue a Thompson [79] y Araki - Yamamoto [6]).
T es el perodo base y T
o
es el perodo global. El perodo base T es el mximo comn
divisor de todos los perodos de muestreo de las entradas y salidas del sistema. El
perodo global es el intervalo de repeticin del esquema de muestreo (en el caso de
muestreo regular es igual al mnimo comn mltiplo de todos los perodos de
muestreo). La relacin entre el perodo global y el perodo base est dada por la
siguiente expresin:
o
T NT =
(3.1)
m es el nmero de entradas
1, 2, 3, . . . , j m =
(3.2)
p es el nmero de salidas
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
30
1, 2, 3,..., i p =
(3.3)
j j
T T
=
% %
es el conjunto de los instantes de muestreo de la entrada
j
u (esquema de
muestreo de la entrada
j
u ).
1,2,3,...
j
,N =
%
(3.4)
i i
T T
=
es el conjunto de los instantes de muestreo de la salida
i
y (esquema de
muestreo de la salida
i
y ).
1 2 3,
i
, , .. .,N =
(3.5)
j
N
%
es el nmero de muestras de la entrada
j
u en el perodo global T
o
.
i
N es el nmero de muestras de la salida
i
y en el perodo global T
o
.
N es el nmero total de muestras de todas las entradas.
1
...
m
N N N = + +
% %
(3.6)
N es el nmero total de muestras de todas las salidas.
1
...
p
N N N = + +
(3.7)
j j
l l
=
% %
es el conjunto de tamaos de cada intervalo de muestreo de la entrada
j
u ,
siendo T la unidad bsica (ver Fig. 3.2). Es decir,
, 1 j j
j
T T
l
T
-
-
=
% %
%
, 1 2 1
j
, , ...,N = +
%
1
1
j
N
j
l N
+
=
=
%
%
Por definicin,
0 0
, 1
0 ,
j
j
j N
T T T
+
= =
%
% %
(3.8)
[ ]
i i
l l
= es el conjunto de tamaos de cada intervalo de muestreo de la salida
i
y ,
siendo T la unidad bsica (ver Fig. 3.2). Es decir,
, 1 i i
i
T T
l
T
-
-
= , 1 2 1
i
, , ..., N = +
1
1
i
N
i
l N
+
=
=
Por definicin,
0 0 , 1
0 ,
i
i i N
T T T
+
= =
(3.9)
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
31
Se aclara que en las expresiones anteriores
, 1
, 1
, , ,
i
j
jo io i N
j N
T T T T
+
+
%
% %
no representan
instantes de muestreo, sino valores definidos para hacer ms generales dichas
expresiones. Los esquemas de muestreo en realidad tienen como primer instante de
muestreo
1 1
o
j i
T T
%
y como ltimo o
i
j
iN
jN
T T
%
%
.
3.3. DEDUCCIN DEL MODELO
Se considera el siguiente sistema continuo MIMO de orden n, controlable y
observable, con m entradas y p salidas. La condicin de controlabilidad y
observabilidad es un requisito para el diseo de distintos tipos de reguladores.
1 1 1
( ) ( )
( ) ( )
donde,
, ,
c c
c c
T T T
m p n
t t
t t
u u y y x x
= +
= +
= = =
x A x B u
y C x D u
u y x
&
L L L
(3.10)
Donde,
x(t) es el vector de estado.
1 n
x
u(t) es el vector de entradas.
1 m
u
y(t) es el vector de salidas.
1 p
y
, , ,
n n n m p n p m
c c c c
A B C D
Aunque las plantas continuas normalmente son estrictamente propias (
c
= D 0 ), aqu
se considera el caso general para efectos de discretizacin de reguladores continuos.
Por ejemplo, los reguladores continuos estticos slo tienen la matriz
c
D .
El modelo discreto monofrecuencia a perodo base T del sistema es (incluyendo
retardos, en cuyo caso el estado ser de orden mayor):
0
(( 1) ) ( ) ( )
( ) ( ) ( )
( ) , ( ) , ,
c c
T
T
c c c
h T hT hT
hT hT hT
T e T e d
+ = +
= +
= = = = = =
A A
x Ax Bu
y Cx Du
A A B B B C C D D
(3.11)
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
32
La matriz B se expresa en columnas y C y D en filas, con el fin de facilitar la
deduccin de las expresiones matemticas que se presentarn ms adelante en este
captulo. Es decir,
1 1
1
, ,
m
p p
= = =
C D
B B B C D
C D
L M M
La discretizacin se hace aplicando los mtodos bien conocidos de la teora de control
de sistemas de datos muestreados [9]. Para determinar las matrices A(T) y B(T) se
utiliza la solucin de la ecuacin de estado continua y se supone que la seal de
entrada es muestreada y pasada a travs de un retenedor de orden cero, de manera
que la seal permanece constante entre dos instantes de muestreo, es decir,
( ) ( ) t hT = u u para ( 1) hT t h T < +
(3.12)
Este modelo (3.11) es la base para la deduccin del modelo multifrecuencia. Por
tanto, es equivalente dar el modelo del sistema en continuo o discreto a mximo
comn divisor. Se puede utilizar un modelo bsico discreto a un perodo menor que
sea divisor del mximo comn divisor, siempre que se utilice una aproximacin con
retenedor de orden cero dada en (3.11). Si se discretiza utilizando otro mtodo, el
modelo multifrecuencia, aunque correcto, puede dar resultados inesperados. Por
ejemplo, si se parte de un modelo discretizado con el mtodo de Tustin, el modelo a
un perodo mayor no corresponde con el modelo discretizado directamente del modelo
continuo con dicho perodo (es decir, la rediscretizacin no es correcta). Es muy
importante esta observacin y se recordar cuando sea necesario.
En lo que sigue, se deduce por sustituciones progresivas el modelo interno de tiempo
discreto multifrecuencia de manera detallada. Se trata de no incluir restricciones y
abordar casos ms generales de muestreo irregular con offset de entradas y salidas.
3.3.1. Deduccin de la ecuacin de estado multifrecuencia
En el mtodo de sustituciones progresivas se obtiene el vector de estado y salida en
cada instante de muestreo base y se reemplaza esta informacin en las ecuaciones
correspondientes a los siguientes instantes. De esta manera se va formando un vector
de entradas y salidas durante cierto horizonte (perodo global). Luego, considerando
que se utilizan retenedores de orden cero, se mantiene constante la entrada de manera
que las expresiones se simplifican y algunas matrices simplemente se suman. Al final
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
33
se reorganizan los resultados con fines de una presentacin ms compacta. En
sntesis, el mtodo busca extender la expresin (3.12) para esquemas de muestreo
multifrecuencia irregulares.
Por sustituciones progresivas, partiendo del modelo (3.11), se llega a las siguientes
ecuaciones a perodo base:
2
1
( ) ( ) ( )
( 2 ) ( ) ( ) ( ) ( ) ( )
( ) (( 1) ) ( ) ( )
... ( ( 2) ) ( ( 1) )
o o o
o o o o o o
N N
o o o o
o o
kT T kT kT
kT T kT T kT T kT kT kT T
kT NT k T kT kT
kT N T kT N T
-
+ = +
+ = + + + = + + +
+ = + = + +
+ + - + + -
x Ax Bu
x Ax Bu A x ABu Bu
x x A x A Bu
ABu Bu
M
En forma matricial, tomando como base la ltima de las anteriores ecuaciones, la
expresin anterior toma la siguiente forma:
1 1 1 2 2 2
1 2 1 2
1
1
(( 1) ) ( )
| |
( )
( )
( ( 1) )
( ( 1) )
N
o o
N N N N N N
m m
o
m o
o
m o
k T kT
u kT
u kT
u kT N T
u kT N T
- - - - - -
+ = +
+
- - -
- - -
+ -
+ -
x A x
A B A B A B A B A B A B L L L
M
M
M
Reorganizando la anterior expresin, de manera que los instantes de muestreo de
cada entrada queden en un orden secuencial, se llega a la siguiente expresin:
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
34
1 2
0 0
0
0
0
(( 1) ) ( ) | |
( )
( )
( ( 1) )
N N N
j j j j
j
j
j
k T kT
u kT
u kT T
u kT N T
- -
+ = +
- - -
+
+ -
- - -
x A x A B A B AB B K K K
M
M
M
Esta expresin contiene entradas muestreadas al mximo comn divisor (perodo base
T). Esta expresin fue utilizada inicialmente por algunos autores. Sin embargo, es
claro que se puede simplificar, puesto que cada seal de entrada permanece constante
por perodos de tiempo que son mltiplos del perodo base. Reteniendo las entradas
en intervalos irregulares
j
T
%
, se llega a la siguiente expresin:
1
, 1
1 1 2
1 1
, 1
0 0
...
1 1 ... 1
0
,
(( 1) ) ( )
| |
(( 1)
j
j N
j j j j
j j
j N
j
N
l l
l l l
N N N
j j j
l l l
j
j
k T kT
u k T T
+
+
+ +
+
- - -
= = + = + + +
+ = +
+
- - -
- +
x A x
A B A B A B
%
%
% %
% % %
% % %
%
K K K
M
%
0 1
0
,
)
( )
( )
j
j
N
j j
j
j N
u kT T
u kT T
+
+
- - -
%
%
M
%
M
Al introducir
0
,
(( 1) )
j
j
j N
u k T T - +
%
%
se permite la retencin de la ltima seal del
intervalo global anterior (ms adelante se introducir en el vector de estados). Con
esto es posible considerar el caso de la no sincronizacin (offset) de las seales de
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
35
entrada y salida cada perodo global T
o
. Si hay sincronizacin (no hay offset),
entonces
1
0
j
l =
%
.
La definicin de cada uno de los parmetros se da en el Epgrafe 3.2.
Al utilizar el subndice definido en la ecuacin (3.4) y realizando la siguiente
sustitucin:
( )
1 , 1 j j
l ... l b
+
= + + -
% %
se tiene:
( )
( )
1 , 1
1 , 1
1 , 1
1
, 1
1 , 1 1
, 1
...
0
...
... 1 1
1
...
0
j j
j j
j j j
j
j
j j
j
l l
N b N l l
j j
b l l l
l
N l
N l l
j j
l
+
+
+
+
+
+ =
+
+ +
- + - + +
= + + + = -
-
-
- + +
=
= =
= =
A B A B
A A B A X B
% %
% %
% % %
%
%
% %
%
El siguiente lema contribuye a la simplificacin de la expresin anterior.
Lema 3.1. ( ) ( )
p
T pT = X B B
Introduciendo la representacin
1
0
p
p
-
=
=
X A tiene lugar la siguiente igualdad
( ) ( )
p
T pT = X B B
(3.13)
Demostracin
Sea,
1
1
0 1
0
( )( ) , ,
p
p
p
-
-
=
= = - - = =
X A I A I A X 0 X I
(3.14)
Entonces,
2 1 ( 1)
0
( ) ( 2 ) ( ( 1) )
0
( ... ) ( )
( ... )
c c c
c c c c
T
p T p T
p c
T
T T N T
c
e e e d
e e e e d
- -
+ + + -
= + + + + = + + +
= + + + +
A A A
A A A A
X B I A A A B I B
B
L
Con el siguiente cambio de variables , kT d d = + = se llega a la
siguiente expresin:
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
36
2
0 ( 1) 0
...
c c c c
T T pT pT
p c c c c c c
T p T
e d e d e d e d
-
= + + + =
A A A A
X B B B
Lo que demuestra el lema.
De esta manera, utilizando el lema anterior e introduciendo
,
=(( 1) )
j
o
j
j N
u k T T - +
%
%
como una variable de estado adicional se obtiene el siguiente resultado (se incrementa
el orden del sistema en un nmero igual al de las variables de entrada no
sincronizadas en T
o
):
1
1
1 2
1 2
1 1
1
1 1 1 1 1
1
2
(( 1) ) ( ) ( )
donde,
, ... | | ... ... | ( ) ( ) | ...
, ... , ,
j
j
D D
o o o
mxn mxm
N N l
o
j j j j
l
D D D D
m
j j
k T kT kT
T T T
-
+ = +
=
= = = -
= = =
x Ax Bu
A A
A
O O
A A A A X B A B
B
B B B B B b
B
%
%
% %
% %
%
% % % %
%
% %
%
1
1
, 1
1
2
1
2 2
1
2
1, si
, , k 1,2,...,N ,
0, en otro caso
j
j
N l
D
j j
l
D
j
D D D
j jk jk
D
m
k N
+
=
+
-
=
= = = =
b A X B
B
B B b b
B
%
%
%
%
M
(3.15)
y
1
0 0 0 0 1 2
,
0 0 0 1 1
1, ,
( ) | ( ) ( ) ( ) |
( ) ( ) ( ) (( 1) ) (( 1) )
j
m
T
D
j j j j j
j N
T
D
o n o m
N m N
kT u kT T u kT T u kT T
kT x kT x kT u k T T u k T T
= + + +
= - + - +
u
x
%
% %
% % %
L L L
% %
L L
(3.16)
Si
1
0
j
T =
%
(no hay offset en las entradas) entonces
2
= A 0
%
y
2
= B 0
%
y las
expresiones anteriores se simplifican y el orden del sistema multifrecuencia es igual al
del sistema original continuo (si hay offset el orden se incrementa en el nmero de
entradas con offset).
Las expresiones anteriores son complejas, pero fciles de implementar en un programa
para computador.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
37
El siguiente lema puede ser muy til para efectos de clculos, simplificacin o
deduccin de casos particulares, adems de su interpretacin fsica directa, muy bien
explicada en el trabajo de Salt [67].
Lema 3.2
El coeficiente
1 D
j
b se puede representar de la siguiente manera incremental
1
( ) ( )
D
o o
j j j j j j
T T T T
= - - - = D b B B B
% %
(3.17)
Demostracin
De acuerdo a la definicin dada en (3.15)
1
1
, 1
1
, 1 , 1
, 1 , 1
( ) ( )
( ) ( )
j
j
N l
D
o
j j j j j
l
o
j j j j
T T l T
T T T T
+
=
+
-
+ +
+ +
= = -
= - -
b A X B A B
A B
%
%
% %
% % %
1 1
, 1
1 1
, 1
1
( )
1
0
0
j
c
j j
j
T l
N l T N l r
D
j j cj
l
r
e d
+ +
+
= =
+
-
- - + +
=
= =
A
b A X B B
%
% %
%
Realizando el cambio de variables
1
1
( ) ,
j
T N l r d d
+
=
= - + + =
%
se
obtiene,
1 1
, 1
1 1
, 1
1 1
1 1
) 1
1
1
0
)
j j j
j
c c
j j
N l r T N l l T
l
D
j cj cj
r
N l r T N l T
e d e d
+ +
+
= =
+
+ +
= =
- + + + - +
-
=
- + + -
= =
A A
b B B
% % %
%
% %
1 1
, 1
1 1
1
1 1
1
0 0
0 0
j j j
c c
j j
c c
N l l T N l T
D
j cj cj
N l T N l T
cj cj
e d e d
e d e d
+ +
+
= =
+
= =
- + -
- -
= -
= -
A A
A A
b B B
B B
% % %
% %
As queda demostrado el lema.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
38
3.3.2. Deduccin de la ecuacin de salida multifrecuencia
Por sustituciones progresivas, partiendo del modelo (3.11) se llega a la siguiente
expresin:
1 2
( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ( 1) ) ( ) ( ) ... ( ( 2) )
( ( 1) )
o o o
o o o o o o
N N
o o o o
o
kT kT kT
kT T kT T kT T kT kT kT T
kT N T kT kT kT N T
kT N T
- -
= +
+ = + + + = + + +
+ - = + + + + - +
+ + -
y Cx Du
y Cx Du CAx CBu Du
y CA x CA Bu CBu
Du
M
En forma matricial y reagrupando cada una de las salidas, de manera que los
instantes de muestreo de la misma salida queden en orden secuencial, se tiene:
0
0
0
1
0
( )
( )
( )
( ( 1) )
i i
i
i
N
i i
y kT
y kT T
kT
y kT N T
-
- - - - - -
+
= +
+ -
- - - - - -
C
C A
x
C A
M M
M
M
M M
1
1
0 1
0 2
2 3
0
...
...
... ( )
...
( )
... ( )
i
N N
m
i i i
u kT hT
u kT hT
u kT hT
- -
- - - - - - - -
+
-
+
+ +
+
- - - - - - - -
D 0
0 D
0 0 0 0
C B 0 0 0
C A B C A B C B 0
M M
M M
M M M M M
M
M M
0 1
0 2
0
1
1
( )
( )
( )
...
...
m
u kT hT
u kT hT
u kT hT
- - -
+
- -
+
- - -
+
- - -
D 0
0 D
M
M
M
M M
M
Reagrupando el vector de entradas, de manera que los instantes de muestreo de la
misma entrada queden en orden secuencial, se tiene:
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
39
0
0
0
2 3 1
0
... ( )
...
( )
( )
( ( 1) )
i i
i j i
i
N N N
i j i i i
y kT
y kT T
kT
y kT N T
- - -
--- --- - - - - -
+
= +
+ -
--- ---
0 0 0 0 C
C B 0 0 0 C A
x
C A B C A B C A
M M M
M M M M M M
M
M M
0
0
0
( )
( )
... ( ( 1) )
j
j
j i j j
u kT
u kT T
u kT N T
---
+
+
+ -
- - - - - ---
C B 0
M
M
M M
0
0
0
( ) 0 ... 0
0 ... 0 ( )
0 0 ...
( ( 1) )
j ij
ij j
ij
j
u kT d
d u kT T
d
u kT N T
- - - - - - -
+
+
+ -
- - - - - - -
M M M
M M M M M
M M
M
La ecuacin anterior contiene entradas y salidas muestreadas a mximo comn
divisor T. Sin embargo, la expresin se puede simplificar. Reteniendo la entrada ( )
j
u t
en intervalos
j
l T
%
y seleccionando la salida ( )
i
y t cada
i
l T
intervalos, se reduce la
expresin anterior y se llega a la siguiente representacin:
1
1 2
1
0 1
0 2
0
...
0
( )
( )
( )
( )
i
i i
i iN
i
i
l
i i i
l l
i i i
l l
i iN
i
y kT T
y kT T
kT
y kT T
+
+ +
-
- - -
- - -
+
+
= +
+
- - -
- - -
C A
C A
x D
C A
M
M
M
%
M M
M
M
0
,
0 1
0
,
(( 1) )
( )
( )
j
j
j
j N
j j
j
j N
u k T T
u kT T
u kT T
- -
- +
+
+
- - -
%
%
%
%
M
%
M
La deduccin de la matriz D
%
es un poco ms compleja. Se divide la deduccin en dos
partes. La primera corresponde al muestreo irregular de las salidas sin incluir la
matriz D en la retencin de las entradas. La segunda parte incluye slo D.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
40
1 2
,
D D D D
ij ij ij ij
= = +
D D D D D
%
(1)
1 D
ij
D
Aqu se considera la parte corresponde al muestreo irregular de las salidas sin incluir
la matriz D en la retencin de las entradas. Se toman solamente los bloques que
relacionan los instantes de muestreo de una salida con los instantes de muestreo de
una entrada; los dems bloques tienen una forma parecida y la deduccin es
semejante a la que se muestra a continuacin.
2 3 4
0 0 0 0 0 ( )
0 0 0 0
( )
0 0 0
( 2 )
0 ( ( 1) )
(
o
i
o i j
i
i j i j o
i
N N N
o i j i j i j i j i
o
j
y kT
y kT T
y kT T
y kT N T
u kT
- - -
+
+ =
+ -
C B
C AB C B
C A B C A B C A B C B
L
L
L
M M M O M M
M
L
)
( )
( 2 )
( ( 1) )
o
j
o
j
o
j
u kT T
u kT T
u kT N T
+
+
+ -
M
Esta expresin contiene las muestras de la entrada y salida cada perodo base T.
Tomando la salida en los instantes de muestreo irregular (sin retener la entrada), se
llega a:
1 1
1 2 1 2
1 1
1 2
0 1 0
1 2
0 2 0
... 1 ... 2
0 0
( ) ( )
( ) ( )
( ) ( ( 1)
i i
i i i i
i i iN iN
i i
i
l l
i j i j i i j
l l l l
i i j i j i j
l l l l
i iN j
i j i j
y kT T u kT
y kT T u kT T
y kT T u kT N T
- -
+ - + -
+ + - + + -
+
+ +
=
+ + -
C A B C A B
C A B C A B
C A B C A B
L
L
M M M M O
L
)
Reteniendo ahora la entrada:
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
41
1 1 2
1 1
1
1 1 2
1 2 1 2
1
1
1 1
1 1
0 1
0 2
1 1
0
... ...
1
( )
( )
( )
j j j
i i
j
j j j
i i i i
j
i
j
i i iN
i
l l l
l p l p
i j i j
p p l
i i
l l l
l l p l l p
i i
i j i j
p p l
i iN
l
l l p l l
i j i
p
y kT T
y kT T
y kT T
+
- -
= = +
+
+ - + -
= = +
+ + - + +
=
+
+
=
+
C A B C A B
C A B C A B
C A B C A
% % %
%
% % %
%
%
L
L
M
M M O
1 2
1
0
0 1
0
1
(( 1) )
( )
( )
j
j
j j
iN
i
j
j
jN
j j
j
jN
l l
p
j
p l
u k T T
u kT T
u kT T
+
-
= +
- -
+
+
B
%
%
% %
%
%
%
M
%
L
La matriz del medio en la ecuacin anterior tiene
i
N filas y ( 1)
j
N +
%
columnas. Se
utilizan los ndices y , dados en (3.5) y (3.4) respectivamente (adicionando el
valor 0 = ), para concretar el resultado anterior y darle una forma ms
estructurada.
1 1
,
, 1, 2, ..., , 0, 1, 2, ...,
ij ij i j
d N N
= = =
D
%
donde,
1
1
1
1
1
,
1
j
i
j
l
l p
ij i j
p l
d
+
=
=
=
-
= +
C A B
%
%
Realizando el siguiente cambio de variable
1
1
j
q l p
+
=
= -
%
se tiene que
1
1 1
, 1
0
1
,
1
i j
j
l l q
ij i j
q l
d
+
= =
+
- +
= -
=
C A B
%
%
se llega a la siguiente igualdad:
, 1
1
1
, ,
0
1
1 1
,
( )
, si 0
( )
, en otro caso
j
l
ij i ij j
q
r
i j
ij
d q
r q l l
q
+
-
=
+
= =
=
= + -
C B
A
0
%
%
(3.18)
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
42
(2)
2 D
ij
D
Aqu se considera la parte corresponde al muestreo irregular de las salidas incluyendo
slo la matriz D en la retencin de las entradas. Se toman solamente los bloques que
relacionan los instantes de muestreo de una salida con los instantes de muestreo de
una entrada; los dems bloques tienen una forma parecida y la deduccin es
semejante a la que se muestra a continuacin
( ) ( ) 0 0 0
( ) 0 0 0 ( )
0 0 0 ( 2 ) ( 2 )
0 0 0
( ( 1) ) ( ( 1) )
o o
i j ij
o o
i ij j
o o ij i j
ij o o
i j
y kT u kT d
y kT T d u kT T
d y kT T u kT T
d
y kT N T u kT N T
+ +
+ +
=
+ - + -
L
L
L
M M M O M M M
L
Esta expresin contiene las muestras de la entrada y salida cada perodo base T.
Tomando la salida en los instantes de muestreo irregular (sin retener la entrada), se
llega a:
1 1
1 2 1 2
1 1
0 1 0 1 1 ( 1)
0 2 0 1 ( ) 1 ( 1)
1 ( ... ) 1 ( ... 1)
0 0
( ) ( )
( ) ( )
( ) ( ( 1) )
i i
i i i i
i i iN iN
i i
i
i i j ij l N l
ij i i j l l N l l
ij l l N l l
i iN j
y kT T u kT d
d y kT T u kT T
d
y kT T u kT N T
- -
+ - - -
+ + - - - -
+
+ +
=
+ + -
0 0
0 0
0 0
M M
( )
1
est en la columna 1
ij i
d l
=
+
Para efectos de simplificacin, se considera la siguiente matriz:
1 1
1 2 1 2
1 1
1 1 ( 1)
1 ( ) 1 ( 1)
1 ( ... ) 1 ( ... 1)
i i
i i i i
i i iN iN
i i
ij l N l
ij l l N l l
ij l l N l l
d
d
d
- -
+ - - -
+ + - - - -
=
0 0
0 0
E
0 0
Reteniendo la entrada segn el esquema de muestreo seleccionado, se tiene que:
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
43
1
1
1
1
1 1
1
,
1
1
1 1 1
1 1
, si 1, est en el intervalo 1,
E
0, en otro caso
1 1 , 0
j
j
l
ij i j j
p
ij
p l
i i j j j j
d p l l l
l l l l l l
+
=
=
+
= =
=
= +
+
= = =
= =
= + +
= =
+ + -
%
%
% %
% % % %
1
1 1
, 1 , 1
1 1
1 1
1
0 1 , 0
j
i i j j j j
l
l l l l l l
+
= =
+ +
= =
= =
- -
- - - <
%
% % % %
Resumiendo se obtiene el siguiente resultado:
2
,
, 1
1
1
,
, 1, 2, ..., , 0, 1, 2, ...,
, si 0 -
0, en otro caso
D
ij ij i j
ij i j j
ij
N N
d l l l
+
=
=
= = =
<
D
%
% %
(3.19)
Reuniendo los resultados anteriores, incluyendo
0
(( 1) )
j
j
jN
u k T T - -
%
%
en el estado, se
llega al siguiente modelo de la ecuacin de salida.
1
, 1
1 2
1 1 1
2 2 2
, , , 0
1
, , ,
0
( ) ( ) ( )
, ,
,
, , ( )
i
j
D D
o o o
l
D D D D
i i i i i
D D D
ij ij ij
l
D D D
ij ij ij ij i ij
q
kT kT kT
d
d d q
=
+
-
=
= +
=
= = =
= =
= = =
y Cx Du
C C C
C C C c c C A
C c c
D D D C
%
% %
% % %
%
%
%
,
0 0 0 0 1 2
( ) | ( ) ( ) ( ) |
i
j ij
T
D
i i i i i iN
kT y kT T y kT T y kT T
= + + +
B
y L L L
(3.20)
En el siguiente epgrafe se renen todos los resultados anteriores.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
44
3.3.3. Ecuaciones dinmicas. Modelo multifrecuencia irregular
El siguiente conjunto de ecuaciones sintetiza el modelo multifrecuencia que se
utilizar para el anlisis, simulacin y diseo en los siguientes captulos.
0 0 0 0 1 2
0 0 0 0 1 2
0 1
(( 1) ) ( ) ( )
( ) ( ) ( )
donde
( )
( )
( )
j
i
D D D
o o o
D D D
o o o
T
D
j j j j j
j,N
T
D
i i i i i iN
D
o
k T kT kT
kT kT kT
kT | u (kT T ) u (kT T ) u (kT T ) |
kT | y (kT T ) y (kT T ) y (kT T ) |
kT x (kT )
+ = +
= +
= + + +
= + + +
=
x Ax Bu
y Cx Du
u
y
x
%
% %
% %
% % %
L L L
L L L
0 0 1
1
1 1
m
T
n o m
,N m,N
x (kT ) u ((k )T T ) u ((k )T T )
- + - +
% %
% %
L L
1, 2, 3, ..., 1, 2, 3, ..., i p j m = =
(3.21)
Las matrices, parmetros e ndices se definen a continuacin (los ndices y parmetros
se definieron previamente en el epgrafe 3.2).
j j
T T
=
% %
es el conjunto de los instantes de muestreo de la entrada
j
u (esquema de
muestreo de la entrada
j
u ).
i i
T T
=
es el conjunto de los instantes de muestreo de la salida
i
y (esquema de
muestreo de la salida
i
y ).
j
N
%
es el nmero de muestras de la entrada
j
u en el perodo global T
o
.
i
N es el nmero de muestras de la salida
i
y en el perodo global T
o
.
1 2
1 2 2 2 1
0
, , ,
N D
j j j
mxn mxm
= = = =
A A
A A A A A A b
0 0
% %
% % % % %
o
T
N
T
=
(3.22)
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
45
1
1
, 1
1
1 1 1 1 2 2 2 2
2
1
, , 1 , 1
2
1
, , , ,
( ) ( )
1, si
0, en otro caso
j
j
D D D D D D
j j j j j jk
N l
D
o
j j j j j j j
l
j
D
jk
T T T T
k N
+
=
+
-
+ +
=
= = = = =
= = - - =
=
B
B B B B b B B B b
B
b A X B A B B
b
%
%
%
% % %
%
% % %
%
, 1 2 k , ,...,N
1, 2, ...
j
, N =
%
1
...
m
N N N = + +
% %
o
T
N
T
=
, 1 j j
j
T T
l
T
-
-
=
% %
%
(3.23)
1
1 2 1 1 2 2
1 1 1
2
, 0
, ,
,
i
D D
i i
l
D D D
i i i i
D D
i ij
d
=
= = =
= =
=
C C C C C C C
C c c C A
C
% % % % %
1 2
i
, ,.. .,N =
, 1 i i
i
T T
l
T
-
-
=
(3.24)
, 1
,
1
, , ,
0
1
1 1
,
, 1
1
1
,
,
( )
, si 0
( )
, en otro caso
, si 0 -
0,
j
D D D
ij ij ij
l
ij i ij j ij
q
r
i j
ij
ij i j j
ij
d
d q
r q l l
q
d l l l
+
-
=
+
= =
+
=
=
= =
= +
= + -
<
=
D D D
C B
A
0
%
%
%
% %
en otro caso
1 2
i
, ,.. .,N = 1, 2, ...
j
, N =
%
, 1 j j
j
T T
l
T
-
-
=
% %
%
, 1 i i
i
T T
l
T
-
-
=
(3.25)
A continuacin se enunciarn algunas caractersticas del modelo anterior y se
deducirn algunos modelos particulares que se encontraron en la bibliografa.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
46
3.4. CARACTERSTICAS DEL MODELO
3.4.1. Caractersticas generales
La representacin (3.21) guarda una gran similitud con el operador de Kranc
presentado por Thompson [79] y con el mtodo de Araki Yamamoto [6]. Del modelo
se deduce de una manera sencilla y directa el operador ZOH Kranc para sistemas
SISO con muestreo regular, el modelo ZOH Kranc MIMO (presentado por Meyer
[52]) y otros modelos (ver epgrafe 3.5). Vlez y Salt [89] obtuvieron previamente una
representacin semejante a la anterior, pero con sincronizacin de todas las entradas
y salidas cada perodo global.
Se destacan en este modelo los siguientes aspectos:
Modelado de sistemas multifrecuencia con muestreo regular o irregular (muestreo
arbitrario, pero que se repite cada perodo global T
o
).
El muestreo regular es normal en los diferentes mtodos de modelado de sistemas
multifrecuencia. El muestreo irregular es poco mencionado y explotado. Aqu se
extiende el mtodo de Salt para sistemas MIMO. La sencillez del mtodo se ve
claramente reflejado en las simulaciones y pruebas que se realizan con el fin de
estudiar el efecto del muestreo irregular en el comportamiento dinmico de las
plantas sometidas a muestreo multifrecuencia (ver ejemplos en el epgrafe 5.4 y,
en particular, el ejemplo 5.4.9).
No es necesaria la sincronizacin de entradas y salidas cada perodo global.
Es decir, se puede considerar un offset de las entradas y salidas (ver Fig. 3.2).
Esta caracterstica permite el anlisis de casos de muestreo en serie [17], donde un
sensor o un actuador se utiliza alternativamente entre varias variables de un
proceso. Este caso concreto no es modelado anteriormente, sobre todo de una
manera tan concisa y fcil de simular como la que se presenta en este trabajo (ver
el ejemplo 5.4.6). Otra aplicacin se tiene en el caso del modelado de sistemas
digitales conectados en red, donde se tiene diferentes relojes, normalmente no
sincronizados entre s. Esta aplicacin es un rea de gran inters, que se sale del
alcance del presente trabajo. Finalmente, el mtodo permite modelar casos como
el muestreo FOLI presentado ms adelante (Fig. 4.4).
Consideracin de un nmero arbitrario de entradas y salidas.
El caso de sistemas con una entrada y una salida es un caso particular del modelo.
Esta caracterstica es comn a todos los mtodos modernos de modelado de
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
47
sistemas multifrecuencia. El presente modelo no aporta nada nuevo al respecto,
adems de adaptarse a las tendencias modernas.
Aplicacin a sistemas con retardo y sin retardo.
La inclusin de retardos en las entradas se lleva a cabo de una manera muy
directa: se obtiene el modelo digital extendido con los retardos, tal y como se
expone en [8]. Ver ejemplo 5.4.1. El retardo se incluye en el modelo de una
manera convencional.
Representacin invariable en el tiempo y causal (observar la forma de la matriz
D
%
, triangular superior por bloques).
El presente modelo no aporta nada nuevo al respecto, adems de adaptarse a un
requisito obvio de este tipo de representaciones de sistemas multifrecuencia.
Sistema de dimensin mnima (no a mximo comn divisor).
Se aprovecha la retencin de las seales de entrada para simplificar el modelo. En
el caso de sincronizacin de todas las entradas y salidas cada perodo global, el
orden del modelo multifrecuencia es del mismo orden del sistema original
continuo. Esta caracterstica facilita el anlisis y diseo, pues existe una relacin
ms directa con el sistema original. Aunque internamente el modelo
multifrecuencia se basa en el modelo del sistema a mximo comn divisor, las
ecuaciones retienen las entradas de forma tal que hay una simplificacin de todas
las ecuaciones.
Dimensiones de los vectores y matrices en (3.21):
( ) ( ) ( )
( )
( ) 1 1 1
n m n m n m N
N n m N N
n m D N D N
+ + +
+
+
A B
C D
x u y
% %
% %
(3.26)
Fcil obtencin de casos particulares
Ver epgrafe 3.5. Slo Meyer se preocup por mostrar su modelo como una
generalizacin del mtodo de Kranc para sistemas SISO. Aqu la deduccin de
casos particulares es directa, ilustrativa e interesante.
Fcil implementacin en computador
La implementacion del mtodo es directa en entornos CACSD (Computer Aided
Control System Design). Su sencillez permite simular diferentes casos, como los
expuestos en el epgrafe 3.5 y los ejemplos del Captulo 5 (MRIC, MROC,
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
48
irregular, regular, en serie, con o sin offset, SISO, MIMO, discretizacin de
reguladores, etc.), de manera muy flexible, pudindose analizar diferentes aspectos
de las realizaciones de manera rpida y comprensible. El Multirate Control
Toolbox para MATLAB, presentado y aplicado en el Captulo 5, abarca todas las
ideas y posibilidades expuestas en el trabajo. Adems, puede ser fcilmente
extendido a sistemas peridicos (por ejemplo, un sistema en lazo cerrado con
diferentes reguladores en diferentes intervalos de muestreo).
Es posible seleccionar el perodo global T
o
(horizonte) de manera arbitraria.
Es posible conservar el esquema de muestreo, pero aumentando el perodo global.
De esta manera, en general, no aumenta ni el tamao de los vectores estirados ni
el orden del sistema multifrecuencia, slo el valor numrico de las matrices. Pero
si se desea, se puede aumentar el nmero de muestras en ese intervalo
(aumentando la dimensin de los vectores estirados) y utilizar esta caracterstica
para diversos fines, como lo menciona Albertos [1].
3.4.2. Estabilidad
La condicin para que el sistema multifrecuencia (3.21) sea estable es que todos los
valores propios de la matriz A
~
se encuentren dentro del crculo unitario. A la matriz
A
~
se le denomina (en trminos de los sistemas peridicos) matriz de monodroma.
Como es sabido [8], si el sistema continuo es estable, entonces el sistema discreto
tambin es estable sin importar el tamao del perodo de muestreo. Sin embargo, la
estabilidad se puede perder en lazo cerrado. En el siguiente captulo se estudiar el
caso de la estabilidad en lazo cerrado de un sistema multifrecuencia. En general, la
estabilidad de un sistema multifrecuencia en lazo cerrado depende del esquema de
muestreo. Como lo ha mostrado Salt ([69],[67]) detalladamente, a partir del mtodo
del lugar de las races, el muestreo MRIC puede mejorar el comportamiento de un
sistema monofrecuencia (por ejemplo, con un regulador PID).
3.4.3. Rango de las matrices
En los mtodos de control que se expondrn ms adelante es importante que las
matrices B
%
y C
%
sean de rango completo. El rango de una matriz puede determinarse
a partir de la descomposicin en valores singulares. Valores singulares cercanos a cero
pueden llevar a un diseo con ganancias de control demasiado grandes. El muestreo
multifrecuencia irregular permite garantizar el rango de las matrices de un sistema a
pesar de que algunas variables sean muestreadas de manera incorrecta.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
49
A continuacin se dan algunas definiciones importantes. La primera definicin
especifica las condiciones para que un sistema muestreado sea controlable y
observable.
Definicin 3.1. Condicin de regularidad del muestreo [8]
Para garantizar la completa controlabilidad y observabilidad al muestrear con
perodo T (monofrecuencia) un sistema continuo, se debe cumplir la condicin
de regularidad del muestreo: Para un entero q, la relacin
(2 ) , 1 q T i i = -
,
no es igual a la diferencia de dos valores propios de la matriz
c
A del sistema
continuo.
Aunque esta condicin es fcil de cumplir, valores del perodo de muestreo cercanos a
los valores crticos pueden llevar a comportamientos indeseados, como oscilaciones
ocultas.
Definicin 3.2. Vector de ndices de controlabilidad
Dada la siguiente matriz de controlabilidad de un sistema MIMO
1 1
1 1 1
| |
n n
c m m m
- -
=
M B AB AB B AB AB L L L
(3.27)
El vector de ndices de controlabilidad CIV es el conjunto mnimo de enteros
[ ]
1 2
, ,...,
c m
n n n n = % % % % para el cual se conserva la controlabilidad del sistema.
Es decir,
1
1
1
1 1 1
rank( | | )
m
n
n
m m m
n
-
-
=
B AB AB B AB AB
%
%
L L L (3.28)
con n igual al orden del sistema. Pueden existir varias combinaciones para los
ndices
j
n% , pero siempre
1
m
n n n + + = % % L .
Definicin 3.3. Vector de ndices de observabilidad
Dada la siguiente matriz de observabilidad de un sistema MIMO
( ) ( ) ( ) ( ) ( ) ( )
T
1 1
1 1 1
| |
T T T T T T
n n
o p p p
- -
=
M C CA CA C C A C A L L L (3.29)
El vector de ndices de observabilidad OIV es el conjunto mnimo de enteros
[ ]
1 2
, , ...,
o p
n n n n = para el cual se conserva la observabilidad del sistema. Es
decir,
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
50
( ) ( ) ( ) ( ) ( ) ( )
1
T
1 1
1 1 1
rank( | | )
p
T T T T T T
n n
p p p
n
- -
=
C C A C A C C A C A L L L
(3.30)
con n igual al orden del sistema. Pueden existir varias combinaciones para los
ndices
i
n , pero siempre
1
p
n n n + + = L .
Ahora se presentan algunas afirmaciones que permiten garantizar el rango completo
de las matrices del modelo matemtico de sistemas multifrecuencia. Ver [2], [22] y
[32] para las respectivas demostraciones. Esta informacin es til en el diseo de
reguladores.
Lema 3.3. Rango de las matrices y B C
% %
La matriz ( ) B C
% %
es de rango completo si y slo si: (i) el sistema continuo es
controlable (observable); (ii) para un entero q y un perodo de muestreo T, la
relacin (2 ) , 1 q T i i = - , no es igual a la diferencia de dos valores propios
de la matriz
c
A del sistema continuo (se cumple casi siempre, exceptuando
algunos puntos); (iii) se selecciona para cada entrada (salida) un nmero de
muestras
j j
N n
%
% (
i i
N n ), donde
j
n% es el ndice de controlabilidad (
i
n es
el ndice de observabilidad) de la planta continua.
En el lema se utiliza (en el clculo de los ndices de controlabilidad y observabilidad)
el hecho de que para casi cualquier esquema de muestreo, la condicin de
controlabilidad y observabilidad del sistema discreto y del sistema continuo es la
misma [15].
Para el caso de muestreo irregular el lema anterior puede aplicarse de la siguiente
manera: si con cierto perodo de muestreo se pierde el rango, es decir,
rank( )
c
n n = < B
%
( rank( )
o
n n = < C
%
), entonces al menos
1
( )
c
n n q - =
(
2
( )
o
n n q - = ) intervalos irregulares deben garantizar el rango.
Diferentes pruebas (ver ejemplo 5.4.2) indican que en efecto el rango de las matrices
del sistema multifrecuencia con muestreo irregular se puede variar dependiendo del
esquema de muestreo que se tome.
Un anlisis semejante al anterior se ha realizado anteriormente, pero en otros
contextos, como el expuesto por Troch ([83]): la observabilidad y controlabilidad se
pueden mejorar utilizando el muestreo arbitrario de las variables del sistema; el grado
de libertad en esta seleccin se puede usar para derivar un criterio para la seleccin
de los instantes de muestreo de manera que sean los mejores con relacin al
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
51
condicionamiento de las matrices debido a los errores de medida, de redondeo e
incertidumbre de los parmetros.
En el ejemplo 5.4.10 se aplica las consideraciones anteriores en el diseo de un
sistema de control multifrecuencia por realimentacin del estado. Dicho ejemplo es
importante analizarlo con sumo detalle por todo lo que implica: aplicacin de
mtodos convencionales a sistemas multifrecuencia, uso del muestreo irregular,
implicaciones del muestreo en el rango de las matrices, incidencia del mtodo de
diseo en el comportamiento intermuestreo.
3.5. DEDUCCIN DE CASOS PARTICULARES
En este epgrafe se deducen varios modelos que se encuentran en la bibliografa y
otros ms. Estos modelos particulares son tiles para validar el modelo obtenido y
para sentar la base para el diseo directo de reguladores (se discretiza la planta por
estos mtodos y a partir del modelo multifrecuencia se disea directamente el
regulador digital).
El modelo general obtenido permite el modelado de todos los casos encontrados en la
bibliografa. En el captulo que se expone a continuacin se hacen simplificaciones en
aspectos como:
Muestreo irregular, pero con consideracin de la sincronizacin de entradas y
salidas (no hay offset). Este mtodo ha sido expuesto por autores como Salt y
Albertos ([67],[68],[2]).
Restriccin al caso de muestreo regular. Se trata de modelos como el de ZOH
Kranc MIMO (expuesto por Meyer [50],[52]) y ZOH Kranc SISO (expuesto por
Thompson [78]).
Esquemas de muestreo particulares: muestreo en serie. El muestreo en serie se ha
tratado en la bibliografa por Choe y Araki [17], pero no con el alcance y
generalizacin expuesto aqu.
Esquemas de muestreo particulares: muestreo MRIC ([7],[22],[23],[31],[67] y otros).
Para el caso de muestreo irregular esto equivale a la generalizacin del mtodo de
Salt [67] para sistemas MIMO. El caso del MRIC regular es el mtodo clsico
citado por varios autores.
Esquemas de muestreo particulares: muestreo MROC. El modelo MROC tiene
una forma diferente a la expuesta en los trabajos de Hagiwara y Araki [32] y
otros.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
52
De este marco seguramente quedan excluidos algunos modelos clsicos y otros nuevos.
EL BMIO [1], por ejemplo, no se presenta aqu debido a otros aspectos fundamentales
que este mtodo incorpora (como la representacin en ecuaciones en diferencias),
aunque puede ser calculado por el mtodo del presente trabajo.
La idea es mostrar la generalidad del mtodo y la forma de abordar los casos
particulares, mostrando la consistencia y sistematicidad de su aplicacin.
3.5.1. Modelo con muestreo irregular y sin offset en las entradas
Este caso se ilustra en la Fig. 3.3. A diferencia del esquema sin sincronizacin, las
entradas se muestrean todas al mismo tiempo (la sincronizacin de las salidas no
aporta ninguna simplificacin considerable) en los instantes de muestreo global.
Aunque se conserva la irregularidad del muestreo, la sincronizacin descarta el
estudio de esquemas como el muestreo en serie de las entradas (epgrafe 3.5.9). Este
modelo es ms simple que el modelo general, ya que no se incrementa el orden del
modelo multifrecuencia debido al offset, como se ve en la forma de la matriz A
~
en el
modelo (3.21) del trabajo, y facilita el anlisis y el diseo, ya que el orden del modelo
es mnimo e igual al orden del modelo continuo de la planta.
Fig. 3.3 Esquema de muestreo irregular con sincronizacin de entradas
En este caso el modelo (3.21) se simplifica teniendo en cuenta que algunos parmetros
son iguales a cero.
Todas las entradas estn sincronizadas, es decir,
1
0
j
l =
%
1
0
j
T =
%
Con la sincronizacin de las entradas se reduce el orden de las matrices:
2 2 2
, , , ( ) ( )
D
o o
kT kT = = = = A 0 B 0 C 0 x x
% % %
As, se obtiene:
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
53
(( 1) ) ( ) ( )
( ) ( ) ( )
D
o o o
D D
o o o
k T kT kT
kT kT kT
+ = +
= +
x Ax Bu
y Cx Du
% %
% % (3.31)
Donde,
1
1
, 1
1
, , 1 , 1
,
( ) ( )
,
j
j
i
N
D D D
j j j
N l
D
o
j j j j j j j
l
D D D
i i i
l
D
i i
T T T T
+
=
+
=
-
+ +
=
= =
= = - - =
= =
=
A A
B B B b
b A X B A B B
C C C c
c C A
%
%
%
%
% % %
%
, 1
,
1
, , ,
0
1
1 1
,
,
, ,
( )
, si 0
( )
, en otro caso
, si 0
j
D D D
ij ij ij
l
ij i ij j ij
q
r
i j
ij
ij
ij
d
d q
r q l l
q
d
+
-
=
+
= =
= =
= +
= + -
D D D
C B
A
0
%
%
%
, 1
1
1
0 0 0 1
,
0 0 0 0 1 2
-
0, en otro caso
( ) | ( ) ( ) |
( ) | ( ) ( ) ( ) |
j
i
i j j
T
D
j j j
j N
T
D
i i i i i iN
l l l
kT u kT T u kT T
kT y kT T y kT T y kT T
+
=
=
<
= + +
= + + +
u
y
%
% %
% %
L L L
L L L
Este modelo es una extensin al muestreo irregular de los mtodos de modelado
matemtico basados en el lifting que se encuentran en la bibliografa. La mayora
de mtodos coinciden en la condicin de sincronizacin.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
54
3.5.2. Modelo con muestreo regular
Este es el caso tpico de modelado de sistemas multifrecuencia presentado por varios
autores ([28], [47], [52], [78]), en los cuales cada una de las variables se muestrean de
manera regular (aunque en general con diferentes perodos). El modelo corresponde a
una extensin del mtodo ZOH Kranc a sistemas MIMO. Este esquema se muestra en
la Fig. 3.4:
Fig. 3.4 Esquema de muestreo regular
En este caso los parmetros e ndices toman los siguientes valores.
Con muestreo regular los intervalos de muestreo son constantes:
1 1 2
1 1 2
j i i j
j j j
i i i
l l , l l
T ( )T , , ,...,N
T ( )T , , ,..., N
= =
= - =
= - =
% %
% % %
Algunos parmetros toman una forma ms simple:
1 1
1 1
j j j j j j
i i j j
N l N l l (N )l
l ( )l , l ( )l
= =
- = - = -
= - = -
% % % % % %
% %
Es decir, en el caso de muestreo regular muchos de los parmetros coinciden,
simplificando considerablemente las expresiones.
Condicin de sincronizacin de entradas y salidas:
1 1
0
j i
l l = =
%
En el caso de sincronizacin no es necesario tener en cuenta el trmino
(( 1) )
j
o
j
jN
u k T T - +
%
%
(este trmino aparece cuando la respectiva entrada presenta
offset respecto al instante de muestreo global). Por tanto:
D
jo
= b 0
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
55
Los vectores de entrada y salida contienen las muestras distribuidas de manera
regular:
0 0 0 0
0 0 0 0
( ) | ( ) ( ) ( ( 1) ) |
( ) | ( ) ( ) ( ( 1) ) |
T
D
j j j j j j
T
D
i i i i i i
kT u kT u kT T u kT N T
kT y kT y kT T y kT N T
= + + -
= + + -
u
y
% % %
L L L
L L L
El modelo es entonces:
(( 1) ) ( ) ( )
( ) ( ) ( )
D
o o o
D D
o o
k T kT kT
kT kT kT
+ = +
= +
x Ax Bu
y Cx Du
% %
% % (3.32)
Donde,
D D ( 1) ( 1)
i i
( )
, [ ] , ( ) ( )
, , ( )
j j
j
i
N
o
D D D D N l N
j j j j j j j j
l
D D l
i i i i i
T
T T
T
- -
- -
= =
= = = =
= = = =
A A A
B B B b b A X B A B
C c c c c C A C A
% %
%
%
% % %
%
1
, , , ,
0
,
,
[ ], [ ] , ( )
si 1 1 0
( )
en otro caso
si 0 1 1
0 en otro caso
j
l
D D D D
ij ij ij ij i ij j ij
q
r
i j j
ij
ij i j j
ij
d d q
r q ( )l ( )l l
q
d ( )l ( )l l
-
=
= = = +
= + - - - -
- - - <
=
D D D C B
A
0
%
%
% %
% %
1 1
1 1
m.c.m.( , ..., , , ..., )
... N= ...
1, 2, ..., 1, 2, ...
o o
o m p
i j
i
j
o o
i j i i j j
i
j
p m
T T
T NT N N N N N N N
T
T
N N
l l T l T T l T
N
N
N N N N N
i p j
= = = =
= = = =
= + + + +
= =
% % %
%
% % %
%
% %
, 1, 2, ..., 1, 2, ...,
i j
m N N = =
%
Como se mencion anteriormente, este modelo fue obtenido en diversas formas y
analizado en forma detallada previamente. Varios autores han mostrado que esta
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
56
representacin conserva todas las propiedades del sistema multifrecuencia original
(alcanzabilidad, controlabilidad, observabilidad, estabilidad, etc).
3.5.3. Modelo ZOH Kranc
Se considera el modelo anterior 3.5.1, pero para plantas SISO. En este caso:
1 1
1
1
1 1
1
m.c.m.( , )
o o
m p
T T
N N
T
T
N N N
= =
= =
=
%
%
%
A partir de (3.32) se puede conseguir el siguiente modelo ms simple:
1 1
1
1
1
1
1
( 1) /
1 1 1 1
1
( 1)
(( 1) ) ( ) ( )
( ) ( ) ( )
, , 1, 2, ..., , ...
D
o o o
D D
o o
N
N
D D D N k N
N
N
N
D
N N
N
k T kT kT
kT kT kT
N
-
-
-
+ = +
= +
=
= = = = = + +
= =
x Ax Bu
y Cx Du
A A
B B b b A XB X I A
C
CA
C C
CA
% %
%
% %
% %
%
% %
%
M
1
1
11 11, 11,
0
, ( )
N
N
D D D
q
d d q
-
=
= = = +
D D C B
%
%
(3.33)
Este es el conocido modelo de operadores de Kranc presentado por Thompson ([78],
[79] y epgrafe 2.6.2) e implementado en el programa CC.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
57
3.5.4. Modelo MRIC irregular con offset en las entradas
En el siguiente caso se considera un muestreo en el cual todas las seales de salida de
la planta se muestrean a un mismo perodo T
o
y cada seal de entrada se muestrea de
manera irregular. El esquema se conoce como MRIC (Multirate Input Control). El
respectivo esquema de muestreo se ilustra en la Fig. 3.5:
Fig. 3.5 Esquema de muestreo MRIC irregular sin sincronizacin de entradas y salidas
Los parmetros del modelo toman en este caso particular los siguientes valores.
En el caso de una sola muestra de la salida sin offset:
1
1, 0 ,
i
l N p = = =
Una muestra por cada salida da un total de N p = muestras en total.
Para las entradas irregulares: 1 2
j
, ,...,N =
%
Reemplazando en (3.21) se obtiene:
1
1 1 1
1 1
1
1
,1
, ,
si 0
( )
en otro caso
i
D D l
i i i i
r
j
ij
r q l
q
+
=
= = = =
= -
C C C C A C C C
A
0
% %
%
Donde,
1
max
1
0 1 2 1
1
j,
j,
q , , ,...,l
q l
+
+
= -
= -
%
%
y
( )
, 1 ,1 , 1
1 ... 0
j j j
l l l
+ +
- - + +
% % %
no se cumple para ningn valor de los
parmetros (dicha expresin es siempre negativa). As que
,1
( ) 0
ij
q
= siempre.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
58
Igualmente,
, 1
1
,
, si 0 , no se cumple
0, en otro caso
ij j j
ij
d l l
+
=
- <
% %
y
,
0
ij
=
Como conclusin: = D 0
%
.
El modelo para este caso particular es:
1
1 2
2
(( 1) ) ( ) ( )
( ) ( )
, ,
D D D
o o o
o
k T kT kT
kT kT
+ = +
= = =
x Ax Bu
y Cx
B
A A
A B C C O
O O
B
% %
%
%
% %
% % %
%
1 2 1 2
, , , A A B B
% % % %
se definen en (3.21)
(3.34)
La popularidad del esquema MRIC se debe, entre otras razones, a que la condicin de
causalidad siempre se cumple durante el diseo directo de reguladores digitales.
3.5.5. Modelo MRIC irregular sin offset en las entradas
El respectivo esquema de muestreo se ilustra en la Fig. 3.6:
Fig. 3.6 Esquema de muestreo MRIC irregular con sincronizacin de entradas y salidas
En este caso, como hay sincronizacin:
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
59
1
2 2 2
0
, y
j
l =
= = = A 0 B 0 C 0
%
% % %
A partir de (3.34) y con las condiciones anteriores se llega al siguiente modelo, mucho
ms simplificado:
1
(( 1) ) ( ) ( ) ( )
( ) ( )
D
o o o o
o o
k T T kT kT
kT kT
+ = +
x A x Bu
y Cx
%
1
B
%
se define en (3.21)
(3.35)
Obsrvese que el vector de salidas es el vector convencional, sin seales estiradas.
Este modelo es una generalizacin del mtodo de Salt ([67],[68],[69]) a sistemas
MIMO. El modelo MRIC en otra forma fue analizado por otros autores.
3.5.6. Modelo MRIC con muestreo regular
En el siguiente caso se considera un muestreo regular en el cual todas las seales de
salida de la planta se muestrean a un mismo perodo T
o
y cada seal de entrada se
muestrea a un perodo /
o
j j
T T N =
% %
. Las entradas y salidas estn sincronizadas.
El esquema de muestreo de un modelo MRIC con muestreo regular se muestra en la
Fig. 3.7:
Fig. 3.7. Esquema de muestreo MRIC regular
En este caso cada salida se muestrea una sola vez en el perodo global:
1,
i i
N l N = = .
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
60
Los intervalos de muestreo estn uniformemente espaciados a lo largo del intervalo
global:
, , 1, 2, ...,
o
j j j
j j
T N
N l N
T N
= = =
% % %
% %
El nmero total de muestras de las salidas (se muestrean una sola vez en el intervalo
global) y entradas es:
1
...
m
N p
N N N
=
= + +
% %
En la siguiente representacin se utiliza la notacin introducida por Salt en
incrementos de las entradas e incrementos de B. La demostracin detallada de las
expresiones se encuentra en su trabajo [67]. Esta forma tiene un significado fsico
claro, que hace muy interesante su estudio.
Para la deduccin del modelo se parte de la ecuacin (3.35) con los valores de los
parmetros e ndices especificados arriba. El modelo respectivo es:
1 1
(( 1) ) ( ) ( ) ( ) ( ( 1) )
( ) ( )
(incrementos de )
(( 1) ) ( ) ( ) ( (
j
N
m
o o o o
j j j j
j
o o
o o o o
j
k T T kT T u kT T
kT kT
k T T kT T
= =
+ = + + -
+ = + - -
x A x B
y Cx
B
x A x B
%
% %
1 1
1) ) ( )
( ) ( )
(incrementos de las entradas)
donde.
( ) ( ) ( ) ( ( 1) ) ( )
and
( ) , si =1
( 1
j
j
N
m
o
j j
j
o o
N
o o
j j j j j j j j j
o
j
j
o
j j j
T u kT
kT kT
T T T T T T T
u kT
u
u kT ( )T ) u (
= =
-
= = - - - -
=
- - -
y Cx
B A B B B
%
%
%
% % % % %
%
2 ), en otro caso
o
j
kT ( )T
- -
%
(3.36)
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
61
3.5.7. Modelo MROC irregular con offset en las salidas
En el siguiente caso se considera un muestreo irregular en el cual todas las seales de
entrada de la planta se muestrean a un mismo perodo global T
o
y cada seal de
salida se muestrea determinado nmero de veces en ese mismo perodo. A este
esquema se le conoce como MROC (Multirate Output Control). El esquema de
muestreo se ilustra en la Fig. 3.8:
Fig. 3.8. Esquema de muestreo MROC irregular sin sincronizacin de entradas y salidas
En este caso, los parmetros tienen los valores que se muestran a continuacin.
Las entradas se muestrean una sola vez en el intervalo global:
1 2
0, , 1
j j
l l N = = =
% %
.
El nmero total de muestras de las entradas es:
, 1, 2, ...,
i
N m N = =
Las entradas estn sincronizadas. Si no hay offset de las entradas, las siguientes
matrices son iguales a cero:
2 2 2
, , = = = A 0 B 0 C 0
% % %
.
Con las simplificaciones anteriores las matrices del modelo multifrecuencia pueden
reducirse teniendo en cuenta lo siguiente.
( )
N
o
T = = A A A
%
1 2
2 2
1 1 1 1 ( )
1
, ( ) ( )
j j
j j
D D D N l l
o
j j j j j j
l l
T T
- +
= = = = = =
B B B B b A X B X B B
% %
% %
% %
1
1 1 1 1 1
, ,
i
l
D D D D
i i i i i
= = = =
C C C C C C C A
% %
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
62
, 1
1
, 1 , 1 , 1
0
1
, 1
,
( )
, 0
( )
, en otro caso
D D D
ij ij ij
N
D
i j ij ij ij
q
r
i
ij
d
d q
r q l N
q
-
=
=
= =
= +
= + -
D D D
C B
A
0
%
Se puede ver que en este caso,
1
1 1
1 1 1
1 1 1 1
0 ,
0 , 0 ,
i
i i i
N
i i
N N N
i i i i
q l N N l
q l l q l q l
+
= =
+ + +
= = = + = +
+ - =
+ - -
As se tiene,
1
1
1
1
1
1
1
, 1 , 1
1
0
1
1
1
, 1
( ) ( )
, 0
( )
, en otro caso
N
i
i
i
N
i
i
i
N l
N
N
i ij ij
s
q l
N
r
i i
ij
q s q l s
r s l l N
s
+
= +
+
= +
- -
-
+
= +
=
=
+
= +
=
= = - =
= + + -
A
0
Pero,
1
1
1
1
1
1
1
1 1
1
1
, 1
0
1 1
( )
i
i
i
N
i i
i
N
N
i i i
l
N
s
ij
l
s
q l
l l l
y
q
=
+
=
= +
+
+
=
= + =
-
-
=
=
- - = -
= =
A X
De otro lado,
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
63
ij
1
, 1
, si 0
0 , en otro caso
i
ij
d l N
<
La expresin anterior siempre se cumple, por lo que
, 1 ij ij
d
=
De esta manera, aplicando el Lema 3.1 se obtiene:
( )
1
, 1
1
i
D
i j ij i j i ij i j i ij ij
l
d d l T d T d
=
= + = + = +
C X B C B C B
Despus de las anteriores manipulaciones matemticas se llega al siguiente modelo:
1
, 1 , 1
(( 1) ) ( ) ( ) ( ) ( )
( ) ( ) ( )
donde,
, ,
, , ( )
i
o o o o o
D
o o o
l
D D D D
i i i i i
D D D D
ij ij i j i ij ij ij
k T T kT T kT
kT kT kT
d d T d
=
+ = +
= +
= = =
= = = +
x A x B u
y Cx Du
C C C C C C A
D D D C B
% %
%
%
(3.37)
Los vectores de entrada y salida son (slo el vector de salidas est en la forma
estirada):
0 0 0 0 1 2
0 0 0 0
( ) ( ) ( ) ( )
( ) | ( ) ( ) ( ( 1) ) |
T
m
T
D
i i i i i i
kT u kT u kT u kT
kT y kT y kT T y kT N T
=
= + + -
u
y
L
L L L
La ecuacin (3.37) se puede llevar fcilmente a la forma que aparece en el trabajo de
Hagiwara, Fujimura y Araki [32]:
( ) ( ) ( )
D
o o o
kT kT kT = - Cx y Du
% %
(3.38)
El modelo presentado aqu es del mismo alcance que el presentado en [32]. All se
considera un muestreo irregular con offset en la medicin de las variables de salida de
la planta y se hace un anlisis muy detallado del modelo.
En [94] Whitbeck y Didaulesky tratan el esquema MROC con muestreo irregular sin
offset para sistemas SISO (lo llaman muestreo de orden mltiple). All se introduce el
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
64
concepto de pseudo - medicin para referirse a la capacidad que tiene este tipo de
esquemas de muestreo para realimentar un vector de salidas con informacin de una
misma variable bsica. Esta idea (utilizada tambin ms tarde por Hagiwara y Araki)
permite la construccin de un regulador de realimentacin de la salida equivalente a
un regulador de realimentacin del estado, pero sin la utilizacin de un observador de
estado o un filtro de Kalman.
3.5.8. Modelo MROC con muestreo regular
Este es un caso particular del Modelo (3.37), en el cual todas las seales de entrada
de la planta se muestrean a un mismo perodo T
o
y cada seal de salida se muestrea a
un perodo /
o
i i
T T N = .
Fig. 3.9. Esquema de muestreo MROC regular
Las entradas y salidas estn sincronizadas. Se parte de la ecuacin (3.37) con los
siguientes valores de los parmetros e ndices.
Muestreo regular de las salidas:
1
1
( 1) , , 0 , ( 1)
i i i i i i i
T T l l l l l
=
= - = = = -
El modelo es:
(( 1) ) ( ) ( ) ( ) ( )
( ) ( ) ( )
o o o o o
D
o o o
k T T kT T kT
kT kT kT
+ = +
= +
x A x B u
y Cx Du
% %
( 1) 1
, 1 , 1
, , ( )
, , (( 1) )
i
D D D D l
i i i i i i i
D D D D
ij ij i j i ij ij ij
T
d d T d
- -
= = = =
= = = - +
C C C C C C A C A
D D D C B
%
%
(3.39)
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
65
El modelo MROC regular es utilizado en [31], donde tiene una representacin
diferente a la que se da aqu. El modelo anterior se puede llevar a la forma estndar
dada en [31]:
(( 1) ) ( ) ( )
D
o o o
k T kT kT + = - Cx y Gu
(3.40)
En efecto, despejando ( )
o
kT x de la primera expresin en la ecuacin (3.39) se tiene:
1 1
( ) ( ) (( 1) ) ( ) ( ) ( )
o o o o o o
kT T k T T T kT
- -
= + - x A x A B u
Esta expresin es correcta si ( )
o
T A es una matriz de rango completo. Esta condicin
es adicionalmente un requisito para el diseo y se garantiza con un correcto muestreo
como se explica con ms detalle en el Epgrafe 3.4.3.
Reemplazando la igualdad anterior en la segunda expresin (3.39) se obtiene:
1 1
( ) (( 1) ) ( ) ( ) ( ) ( )
D
o o o o o o
T k T kT T T kT
- -
+ = - -
CA x y D CA B u
% % %
Comparando esta expresin con (3.40) se deduce la siguiente equivalencia entre el
modelo expuesto aqu y el modelo expuesto por Hagiwara y Araki en [31]:
1
1
( )
( ) ( )
o
o o
T
T T
-
-
=
= -
C CA
G D CA B
%
% %
(3.41)
Este resultado es interesante, pues enlaza dos representaciones diferentes en su forma,
pero totalmente equivalentes una a la otra. El modelo (3.41) incluye plantas propias
(no slo estrictamente propias).
A continuacin se demuestra en ms detalle la expresin anterior.
Lema 3.4. Equivalencia entre modelos MROC
Los modelos (3.39) y (3.40) son equivalentes si el modelo multifrecuencia es de
rango completo. Esta equivalencia est dada por las siguientes igualdades:
1
1
( )
( ) ( )
o
o o
T
T T
-
-
=
= -
C CA
G D CA B
%
% %
Demostracin
Se transforman las matrices
C y
G hasta llevarlas a la forma dada en [31]. Es
decir,
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
66
0
( 1)
( 1)
0
0
i i
c
c i i
i i
c i i c
c
i
i
c
NT
c
i
NT
i
N T
N T
i c
i
T
i
T
c
i
e d
e
e
e d
e
e d
-
-
- -
- -
-
-
- - - - -
- - - - -
= =
- - - - -
- - - - -
A
A
A
A
A
A
C B
C
C
C B
C G
C
C B
M
M
M
M
M
M
Se tiene que:
(
1 1
( 1) ( 1)
( ) ( )
c i i
c i i c i
c o
c i i i i
NT
i i i
l T
N
i i
i
T
o o
N l N T
i i
e
e
e
T T e
e
-
- -
- - -
- -
- - - - - - - - - - - - - - -
= = = =
- - - - - - - - - -
A
A
A
A
A
C C C
C A C
C
C CA A
C A C
M
M M
%
M M
M M
1)
i
c i
T
T
i
e
-
- - - - -
A
C
M
M
Se tuvo en cuenta que
o
i i
T N T =
De otro lado,
, 1 , 1
, , (( 1) )
D D D D
ij ij i j i ij ij
d d T
= = = -
D D D C B
%
Se considera una planta estrictamente propia, por tanto 0
ij
d =
,11
,21
, 1
(0)
( )
(( 1) )
i
D
ij i j
D
i j i ij
D
ij
D
i j i i
ij N
d
T d
N T
d
= =
-
C B
C B
D
C B
M M
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
67
La matriz D
%
puede llevarse a la siguiente forma:
1
1
1
(0) (0)
( ) ( )
(( 1) ) (( 1) )
m
i i
m
i i i i
m
i i i i i i
T T
N T N T
--- --- ---
=
- -
--- --- ---
C B C B
C B C B
D
C B C B
M
K
L
%
M M
L
M
0
( 1)
0
0
(0)
( )
(( 1) )
i
c
i i
c
T
i
c
i
i i
N T
i i i
c
i
e d
T
N T
e d
-
---
---
= =
-
---
---
A
A
C B
C B
C B
D
C B
C B
M
M
%
M M
M
M
Combinando los resultados anteriores se tiene:
( 1)
0
( 1)
0
0
( )
c i i
i
c
c i i
i i c i
c
i
NT
T
i
c i
N T
i
o
N T
T
i
c
i
e
e d
e
T
e
e d
-
- -
-
-
-----
---
-----
-
= - =
-----
---
A
A
A
A
A
C
C
C B
C
G B
C
C B
M
M
M
M
M
M
M
0
( 1)
0 0
( 1)
0 0
i i
c c i i
i i i
c c c i i
i i i i
c c c i
NT
NT
c
T NT
N T
c c
i i
N T NT
T
c c
i i
e e d
e d e e d
e d e e d
-
- -
-
-
-
-
-----
A A
A A A
A A A
B
C B C B
C B C B
M
M
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
68
( )
0
( ( 1) )
0 0
( 1)
( )
0 0
i i
c c i i i i
i i i
c c i i
i i i i
c c i
NT
NT NT
c
i
T NT
N T
c
i
N T NT
T
c
i
e e d
e d e d
e d e d
- -
- -
-
-
- - - - -
-
-
=
-
- - - - -
A A
A A
A A
C B
C B
G
C B
M
M
M
0
( 1)
0
0
i i
c
i i
c
i
c
NT
c
i
N T
c
i
T
c
i
e d
e d
e d
-
- -
-
- - - - -
=
- - - - -
A
A
A
C B
C B
C B
M
M
M
En la expresin anterior se hizo el siguiente cambio de variables en cada una
de las integrales:
, 1, 2, ...,
i i
sT s N = - =
El lema queda demostrado.
En [31],[23],[92] y [94] se da una detallada descripcin del modelo y de aspectos
relacionados con el control. La caracterstica ms importante de los esquemas de
muestreo MROC es la posibilidad, bajo ciertas condiciones (planta observable y
seleccin de perodos de muestreo de acuerdo a los ndices de observabilidad), de
establecer una ley de control con realimentacin de la salida equivalente a una ley de
control con realimentacin del estado.
Es interesante ver como la notacin introducida al principio del captulo, basndose
en la notacin de Araki Yamamoto pero llevndola a un plano ms general,
coincide completamente con la notacin de Hagiwara Araki para el modelo MROC
regular. Este resultado puede llevar a la conclusin que la notacin fue seleccionada
adecuadamente, de manera que se pueden obtener modelos particulares conservando
las notaciones propias de cada uno de stos.
3.5.9. Modelo de muestreo en serie de entradas
El modelo (3.34) incluye el modelo de muestreo en serie de entradas, en el cual las
entradas del sistema se aplican de manera escalonada (secuencial), mientras que la
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
69
salida se da a perodo global. Este esquema se da, por ejemplo, en el caso de seales
de control enviadas por un computador, una tras de otra, a travs de un medio
compartido de comunicacin.
El esquema de muestreo se ilustra en la siguiente figura:
Fig. 3.10. Modelo de muestreo en serie de entradas
En este caso, se tiene el mismo modelo (3.34) con los siguientes parmetros.
Cada entrada se muestrea una sola vez en el intervalo global (todas las entradas,
menos la primera, presentan offset), por tanto: ( 1)
j
T j T = -
%
Cada salida se muestrea una sola vez al principio del intervalo global: 0
i
T = ,
1
0
i
l = .
Todas las entradas y salidas se muestrean una sola vez:
1 , 1 , 1 , 1 ,
j i
N N N m = = = = =
%
.
Los vectores estirados son:
0 0 0 0 1 2
0 0 0 0 1 2
( ) ( ) ( ) ( ( 1) )
( ) ( ) ( ) ( )
T
D
m
T
p
kT u kT u kT T u kT N T
kT y kT y kT y kT
= + + -
=
u
y
L
L
El modelo es semejante al dado por la ecuacin (3.34).
3.5.10. Modelo de muestreo en serie de salidas
El modelo (3.37) incluye el caso de muestreo en serie de las salidas, en el cual las
entradas se obtienen a perodo global mientras que las salidas se dan de manera
escalonada. Es el caso de la utilizacin de un sensor para varias variables.
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
70
En la Fig. 3.11 se muestra el respectivo esquema de muestreo en serie de las salidas.
Fig. 3.11. Modelo de muestreo en serie de salidas
El nmero de muestras de cada seal de entradas y salidas en un perodo global es
igual a uno: 1, 1, ,
o
N p T pT = = = =
Cada salida se muestrea una sola vez y, en general, con offset:
1
( 1) , 1
i i
T i T l i = - = -
Cada entrada se muestrea una sola vez en los instantes de muestreo global:
1 2
0, 0,
j j j
T l l N = = =
% % %
.
Como las seales de entrada no tienen offset, entonces:
2 2 2
, , = = = A 0 B 0 C 0
% % %
El modelo en serie de las salidas es idntico al modelo (3.37), donde se tiene una sola
muestra de cada una de las seales de salida. Es decir,
1
2
1
,11
,11
(( 1) ) ( ) ( ) ( ) ( )
( ) ( ) ( )
,
(( 1) )
o o o o o
D D
o o o
p
p
D D D
ij ij ij
D
i j ij ij
k T T kT T kT
kT kT kT
d
d i T d
-
+ = +
= +
= =
= - +
x A x B u
C
C A
y x Du
C A
D D D
C B
%
M
(3.42)
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
71
3.6. CONCLUSIONES DEL CAPTULO
En este captulo se dedujo un mtodo de modelado de sistemas multifrecuencia a
partir de sustituciones progresivas, y se discutieron algunas caractersticas del mismo.
El mtodo de modelado introducido presenta ciertas caractersticas interesantes tanto
para el anlisis como para la simulacin. Entre ellas estn: muestreo irregular,
posibilidad de offset en entradas y salidas, aplicacin a sistemas MIMO,
representacin invariable en el tiempo, fcil implementacin en computador,
deduccin sencilla y directa de casos particulares de muestreo. El modelo utiliza el
enfoque del lifting (en el sentido explicado con anterioridad), en el cual se
enmarcan la mayora de mtodos de modelado de sistemas peridicos y
multifrecuencia; la diferencia est su presentacin concreta y manejo claro de sus
parmetros.
Se estudiaron igualmente las condiciones para la estabilidad y rango completo de las
matrices del modelo multifrecuencia. Se destaca la posibilidad de garantizar el rango
completo con un muestreo irregular. En un ejemplo se ilustra lo relacionado con este
tema. Estos aspectos se utilizan ms adelante en el diseo, tal y como se muestra en
el ejemplo 5.4.10.
A partir del modelo se dedujeron varios casos particulares que confirman la validez
del mtodo. Entre los casos particulares se encuentran algunos que no estn en la
bibliografa, al menos en la forma planteada aqu (por ejemplo, los casos de muestreo
en serie 3.5.10 y 3.5.9, y el modelo MROC 3.5.8 y 3.5.7 en la forma dada). Estos
casos particulares simplifican el anlisis y diseo en casos particulares debido a su
representacin simplificada. En el siguiente captulo se disearn reguladores para
algunos de estos casos particulares y otros esquemas de muestreo, pero buscando
aspectos comunes que permitan diseos ms generales. Es interesante la aplicacin
que se hace para un tipo de muestreo no presentado antes en la bibliografa: el
esquema FOLI (Fig. 4.4). Este esquema es fundamental para el captulo de diseo y
solamente puede ser modelado (hasta donde se conoce) con el modelo propuesto aqu.
La representacin externa del modelo no se trat, debido a que sta es posible slo
para esquemas de muestreo MRIC y no para casos ms generales, los cuales son de
inters en este trabajo. La representacin interna es el mtodo ms indicado para el
estudio de sistemas multifrecuencia con muestreo arbitrario, ya que en general se
tiene un estiramiento de las entradas y salidas, llevando el sistema a un caso
MIMO, generalmente.
En el Captulo 5 se muestran las funciones desarrolladas para el modelado, anlisis y
simulacin a partir del modelo presentado. Tambin se disearon funciones para el
clculo directo del modelo con cualquier esquema de muestreo, clculo de los vectores
CAPTULO 3. MODELADO MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
72
de ndices de controlabilidad y observabilidad, obtencin de la controlabilidad y
observabilidad para diferentes combinaciones de estos ndices.
El modelo se implement en MATLAB/SIMULINK y puede ser utilizado para el
clculo y simulacin de sistemas multifrecuencia con una gran variedad de esquemas
de control. El modelo representa de esta manera el ncleo de dicha herramienta con
extensin a prcticamente todos los casos de muestreo encontrados en la bibliografa
y otros que se puedan pensar (tipo FOLI).
De esta manera, se cuenta con un modelado con unas propiedades y caractersticas
que se tratarn de explorar en el diseo de reguladores multifrecuencia, acompaado
de unas adecuadas herramientas de clculo [91].
Modelado y simulacin de sistemas con muestreo no convencional
73
Captulo 4. Diseo de
reguladores multifrecuencia
4.1. INTRODUCCIN
En el Captulo 3 se obtuvo un modelo multifrecuencia que se aplica ahora en el
diseo de reguladores. En el Captulo 5 se ilustran, por medio de ejemplos y
programas de MATLAB escritos para ese fin y presentados en este trabajo, los
mtodos descritos a continuacin.
Para el diseo se tiene en cuenta que el modelo es una representacin invariable en el
tiempo del sistema multifrecuencia y que el modelo conserva todas las caractersticas
del sistema multifrecuencia original. De esta manera, se pueden aplicar mtodos de
control clsico y moderno para sistemas discretos monofrecuencia, bajo ciertas
condiciones. La principal condicin es la restriccin de causalidad (Definicin 4.1,
Pgina 78).
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
74
El marco de aplicacin particular de los mtodos presentados y del esquema FOLI es
el control en sistemas distribuidos. En un proceso de manufactura existe una gran
cantidad de dispositivos de medicin y control separados y conectados por un medio
comn de comunicacin. En muchas ocasiones la comunicacin directa entre el
controlador y la planta no est siempre disponible, introduciendo retardos e
irregularidad en los procesos de muestreo. Por tanto se debe utilizar el canal de
medicin y control de manera alternativa por un lapso de tiempo determinado
(ventana de tiempo): las muestras de cierta variable controlada se encapsulan dentro
de un marco, el cual es enviado al controlador despus de que el medio compartido es
concedido; de la misma manera, las acciones de control calculadas por un controlador
son enviadas a travs del medio compartido y son aplicadas a la planta por el
actuador. En lugar de utilizar dichas ventanas para una sola muestra, podran
utilizarse de una manera ms efectiva para el cumplimiento de varios fines
complementarios: tomar varias medidas con fines de pseudo - medicin y aplicar
varias acciones de control con el fin de suavizar el control, lograr una mejor
estabilidad, etc. En este caso se llega a un esquema multifrecuencia irregular y a un
esquema FOLI.
Adems del objetivo prctico, se tiene un inters matemtico al considerar que las
frecuencias de accin y medicin pueden seleccionarse con cierto grado de libertad y
tratar de extender las tcnicas clsicas de diseo. Se pretende llevar, en lo posible, un
problema de diseo multifrecuencia a un problema estndar monofrecuencia.
Bsicamente se toman dos esquemas de diseo: un grado de libertad y dos grados de
libertad, y dos esquemas de muestreo FOLI y MRIC. En el MRIC es interesante el
caso de control con muestreo en serie de la accin de control.
En el epgrafe 2.5 se mostr una clasificacin de los mtodos de diseo encontrados en
la bibliografa, acompaada de un anlisis de dicha informacin. Ahora se ampla un
poco ms dicho anlisis.
En general, los mtodos de diseo parten de modelos muy especficos. En esencia
muchos de ellos son equivalentes. En el trabajo se tratar de agruparlos en torno a un
solo mtodo de modelado, tratando de definir aspectos comunes.
Los aspectos ms relevantes que se consideran actualmente en el diseo de
reguladores multifrecuencia son:
Rizado de la respuesta temporal.
Mejor seleccin de los perodos de muestreo, dado un regulador (segn estabilidad,
mrgenes, etc.).
Diseo directo de reguladores.
Ubicacin de ceros
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
75
Robustez
En el trabajo se hace especial nfasis al problema de rizado, diseo directo de
reguladores y mejor seleccin de los perodos de muestreo. El problema de rizado se
presenta especialmente en esquemas de muestreo MRIC o semejantes y se han
propuesto en la bibliografa diversas formas para corregirlo. La idea general es que el
problema se debe a una incorrecta seleccin del mtodo de control. Ms adelante se
presenta una visin general del problema y se proponen algunas soluciones.
En lo que sigue se presentan dos mtodos de diseo (mapeo del modelo y asignacin
de polos). La visin general consiste en utilizar el mtodo de modelado desarrollado
en el trabajo, de manera que el diseo de reguladores multifrecuencia se realice de
una manera directa, clara, sencilla y con ms grados de libertad. Muchos mtodos
han sido expuestos de alguna manera por otros autores, cada uno de los cuales parte
de ideas y modelos diferentes. Aqu se trata de presentar todos estos mtodos desde
un punto de vista unificado, llevndolos a esquemas ms generales (el esquema FOLI
es ms general que el MRIC).
Los mtodos que se obtienen son probados e ilustrados por medio de ejemplos y la
aplicacin del Multirate Control Toolbox. A partir de cada ejemplo se estudian las
caractersticas de cada mtodo, como su complejidad de diseo, generalidad,
comportamiento intermuestreo, etc. La herramienta desarrollada y aplicada al estudio
de estos mtodos result muy apropiada y permite abordar los problemas propuestos
y otros que ya se tienen en mente (sistemas peridicos, robustez, etc.).
4.2. PLANTEAMIENTO DEL PROBLEMA DE DISEO
A continuacin se muestran los diagramas de bloques de los dos esquemas de diseo
que se considerarn. Esta seleccin se hace teniendo en cuenta los esquemas ms
encontrados en las bibliografa y la generalidad que ellos representan.
Fig. 4.1. Diseo con un grado de libertad
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
76
El diseo con un grado de libertad corresponde a un regulador de realimentacin de
la salida.
El diseo con dos grados de libertad se representa aqu para el caso de realimentacin
del estado o de la salida con prealimentacin.
Fig. 4.2 Diseo con dos grados de libertad
Los reguladores y
r x
K K se consideran aqu estticos, mientras que
y
K puede ser un
regulador dinmico. El caso de reguladores estticos (por realimentacin del estado o
de la salida) es ms sencillo de abordar y existen herramientas de cmputo para su
clculo. Una de las ventajas del control multifrecuencia es que siempre es posible
seleccionar un esquema de muestreo de manera que con un regulador esttico se
pueden cumplir las exigencias del diseo (ver, por ejemplo, el epgrafe 4.4.1).
En el caso de reguladores estticos las dimensiones de las matrices son:
N N N n N N
r x y
K K K
(4.1)
El diseo con un grado de libertad de la Fig. 4.1 se representa con mayor detalle en
la Fig. 4.3.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
77
Fig. 4.3. Sistema multifrecuencia correspondiente a un diseo con un grado de libertad
En lo que sigue del captulo se partir de los siguientes modelos multifrecuencia de la
planta y de los reguladores (en general, dinmicos). Se busca abordar los problemas
de la manera como se hace con los sistemas monofrecuencia: la planta se discretiza de
acuerdo a algn modelo (aqu se hace con un modelo multifrecuencia) y se propone
un modelo discreto con ciertos parmetros por disear (modelo multifrecuencia del
regulador).
El modelo multifrecuencia de la planta es el siguiente, de acuerdo a la ecuacin
(3.21):
( ) ( ) ( )
( )
( ) 1 1 1
(( 1) ) ( ) ( )
( ) ( ) ( )
D D D
o o o
D D D
o o
n m n m n m N
N n m N N
D n m D N D N
k T kT kT
kT kT kT
+ + +
+
+
+ = +
= +
x Ax Bu
y Cx Du
A B
C D
x u y
% %
% %
% %
% %
(4.2)
El modelo multifrecuencia (4.2) de la planta se obtiene aplicando (3.21) segn el
modelo propuesto. En principio se considera que los perodos de muestreo de las
seales de control y controladas estn dados (por el teorema de Shannon). Sin
embargo, en algunos casos se pueden establecer criterios para su seleccin (por
ejemplo, de manera que se conserve la controlabilidad y observabilidad del sistema).
Se propone el siguiente modelo multifrecuencia del regulador ) (
o R
z G , semejante al
modelo multifrecuencia de la planta, pero cuyos parmetros de diseo (desconocidos)
son las matrices , , ,
R R R R
A B C D
% % % %
del regulador dinmico.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
78
1
(( 1) ) ( ) ( ) ( )
( ) ( ) ( ) ( )
R R R R
R
D D
o o o o
R R R R
D D D
o o o
R R
n n n N N n N N
R R R R
n
R
k T kT kT kT
kT kT kT kT
+ = + -
= + -
x A x B r y
u C x D r y
A B C D
x
% %
% %
% % % %
(4.3)
Partiendo de la representacin invariable en el tiempo, el problema de diseo del
regulador multifrecuencia se limita, desde este punto de vista, al clculo de la
cudruple , , ,
R R R R
A B C D
% % % %
(diseo con un grado de libertad), ,
r x
K K (diseo con
dos grados de libertad y realimentacin del estado) ,
r y
K K (diseo con dos grados
de libertad y realimentacin de la salida), segn ciertas especificaciones de diseo.
El principal problema para el diseo de reguladores multifrecuencia es la llamada
restriccin de causalidad, la cual se define a continuacin.
Definicin 4.1. Restriccin de causalidad
El regulador multifrecuencia , , ,
R R R R
A B C D
% % % %
satisface la restriccin de
causalidad si para
D
ij R
=
D D
%
y
,
D D
ij ij
d
=
D , se tiene que
,
0
D
ij
d
= siempre
que
i j
T T
<
%
(las salidas actuales no dependen de las entradas futuras). Si la
restriccin es
i j
T T
%
(las salidas actuales no dependen de las entradas
futuras ni presentes), entonces se tiene una restriccin de causalidad estricta.
En otras palabras, se cumple la restriccin de causalidad si
R
D
%
tiene una
estructura triangular inferior por bloques.
Para el diseo de reguladores multifrecuencia que satisfagan la condicin de
causalidad se han sugerido dos polticas generales [8]:
Una constructiva, que usa compensadores correctos que satisfacen la condicin
de causalidad. En este caso se introducen restricciones o elementos
complementarios que garantizan la causalidad. Se pueden incluir aqu la
utilizacin de un esquema de muestreo particular (como el MRIC), uso de
precompensadores (Khargonekar, se introduce un retardo adicional), operadores
anidados, discretizacin de reguladores continuos.
Una analtica, que usa la parametrizacin de Youla (o parametrizacin Q, ver
[96],[20]) con la condicin de causalidad. La parametrizacin Q permite
parametrizar todo controlador que puede estabilizar un modelo discreto de una
planta, por medio de una sola funcin Q(z) ([20], [50], [65]). Este es un caso
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
79
general que admite cualquier esquema de muestreo. La causalidad se asegura en el
diseo mismo (sin ninguna condicin externa).
En el trabajo se aplica para el diseo de reguladores multifrecuencia la poltica
constructiva: se utiliza un esquema de muestreo particular o la discretizacin en lazo
abierto o cerrado (mapeo del modelo). El siguiente lema simplifica el diseo directo
de reguladores multifrecuencia y se usar ms adelante.
Lema 4.1. Condicin para = D 0
%
La matriz D
%
del modelo multifrecuencia (3.21) es una matriz nula si se
cumplen las siguientes condiciones: (i) el sistema continuo es estrictamente
propio; (ii) cualquier muestra de cualquier entrada es posterior o igual a
cualquier muestra de cualquier salida.
Demostracin
En la ecuacin (3.21) la matriz D
%
tiene la siguiente forma:
, 1
1
, , , ,
0
1
1 1
,
,
1
1
,
, , ( )
, si 0
( )
, en otro caso
, si 0 -
j
l
D D D
ij ij ij ij i ij j ij
q
r
i j
ij
ij i j j
ij
d d q
r q l l
q
d l l l
+
-
=
+
= =
+
=
=
= = = Y + W
= + -
Y =
<
W =
D D D C B
A
0
%
%
%
% %
1
0, en otro caso
Si el sistema continuo es estrictamente propio (D = 0) entonces
,
0
ij
W = .
Para que
,
( )
ij
q
Y = 0 se requiere que
1
1 1
0
i j
q l l
+
= =
+ - <
%
.
Donde,
1
0 1 2 1
j,
q , , ,...(l )
+
= -
%
. La desigualdad anterior se debe cumplir para
el mayor valor de q. Es decir,
, 1 , 1
1 1 1 1
1 0 1
i i j j j j
l l l l l l
+ +
= = = =
- + - - < < +
% % % %
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
80
Multiplicando la expresin anterior por el perodo base T y simplificando se
tiene:
1 1
1 2 1 , 1 1 2 1 , 1
( ) ( )
( ) ... ( ) ( ) ... ( )
i j
i j i i i i j j j j
i j
l T l T T
T T T T T T T T T T T
T T T
= =
- -
< +
+ - + + - < + - + + - +
< +
%
% % % % %
%
Sin prdida de generalizacin, esta ltima desigualdad se puede escribir como:
i j
T T
%
. El lema queda demostrado.
Las condiciones del lema anterior se cumplen claramente para un esquema de
muestreo MRIC y un esquema como el que se muestra en la Fig. 4.4. El esquema
FOLI (The Outpus First, the Inputs of Last) corresponde al caso cuando se
muestrean primero todas las salidas y luego todas las entradas de la planta, con lo
que se garantiza que el respectivo regulador ser causal, en el modelo de la planta
= D 0
%
y se tiene ms libertad para obtener matrices de un orden y condiciones
determinadas. La causalidad se logra debido a que el regulador primero obtendr
todas las medidas necesarias y luego actuar, sin posibilidad de que una accin
dependa de una medida futura. Este esquema es posible slo con el mtodo de
modelado multifrecuencia propuesto en el presente trabajo (debido al offset de las
entradas).
Fig. 4.4. Esquema de muestreo FOLI (The Outpus First, the Inputs of Last) de la planta
4.2.1. Problema con un grado de libertad
Ahora se examina el caso de un regulador de realimentacin de la salida. Partiendo
de los modelos multifrecuencia de la planta (4.2), del regulador (4.3) y del diagrama
de bloques del sistema (Fig. 4.1 o Fig. 4.3), se puede aplicar el lgebra de bloques
habitual de los sistemas monofrecuencia para llegar al modelo en lazo cerrado.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
81
Reemplazando unas ecuaciones en otras hasta eliminar el vector ( )
D
o
kT u ) se obtiene:
(( 1) ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
D D D D
o o o o o
R R R R
D D D D
o o o o o
R R R R
k T kT kT kT kT
kT kT kT kT kT
+ = + + -
= + + -
x Ax BC x BD r BD y
y Cx DC x DD r DD y
% % % % % % %
% % % % % % %
Despejando ( )
D
o
kT y de la segunda de las anteriores ecuaciones y reemplazando en la
primera y en la ecuacin (4.3) del regulador, se llega a:
( ) ( ) ( ) ( )
(( 1) ) ( ) ( ) ( ) ( ) ( )
( )
(( 1) ) ( ) (
D D D
o o o o
R R R
D D D D
o o o o o o
R R R R R R R
D
o
R R
D
o o o
R R R R
kT kT kT kT
k T kT kT kT kT kT
kT
k T kT kT
= + +
+ = + + - - -
-
+ = +
y NCx NDC x NDD r
x Ax BC x BD r BD NCx BD NDC x
BD NDD r
x A x B r
% % % % %
% % % % % % % % % % % %
% % % %
% %
1
) ( ) ( ) ( )
donde,
( )
D D
o o o
R R R R R R
R
N
kT kT kT
-
- - -
= +
B NCx B NDC x B NDD r
N I DD
% % % % % % % %
% %
Pero,
( ) ( ) ( )
1 1
y
R R R R R R R R R R R
R R R R
- -
- = - + = + + - =
- =
BD BD NDD BD I I DD DD BD I DD I DD DD BD N
B B NDD B N
% % % % % % % % % % % % % % % % % % % % % %
% % % % %
De esta manera se consigue el siguiente modelo en lazo cerrado de un sistema con
realimentacin de la salida:
(( 1) ) ( )
( )
(( 1) ) ( )
( )
( ) (
( )
D D
o o
D
o
o o
R R
D
o
D D
o
o
R
k T kT
kT
k T kT
kT
kT
kT
- - +
= +
+
- -
= +
R R R R R
R R R R R
R R
A BD NC BC BD NDC BD N x x
r
x x B N B NC A B NDC
x
y NC NDC NDD r
x
% % % % % % % % % % % %
% % % % % % %
% % % % %
1
( ) ( ) ( )
( )
)
donde,
( )
R R R
R
o
R
N
n m n n m n n m n N
cl cl
N n m n N N
cl cl
kT
-
+ + + + + +
+ +
= +
N I DD
A B
C D
% %
% %
% %
(4.4)
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
82
Para el caso de compensacin esttica:
R
= D F
% %
y las dems matrices son ceros. En
ese caso la ecuacin anterior toma una forma ms simple:
(( 1) ) ( ) ( ) ( )
( ) ( ) ( )
D D D
o o o
D D D
o o o
k T kT kT
kT kT kT
+ = - +
= +
x A BFNC x BFNr
y NCx NDFr
% % % % % %
% % % (4.5)
A partir de esta expresin se puede realizar el diseo, por ejemplo, por asignacin de
polos (ver epgrafe 4.4).
4.2.2. Problema con dos grados de libertad
Igual que en el caso anterior, aplicando el lgebra de bloques al diagrama de la Fig.
4.2 se tiene que (caso general de un regulador dinmico):
(( 1) ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
(( 1) ) ( ) ( )
D D D D D
o o r o x o o o
R R R
D D D D D
o o r o x o o o
R R R
D
o o o
R R R R
k T kT kT kT kT kT
kT kT kT kT kT kT
k T kT kT
+ = + - - -
= + - - -
+ = +
x Ax B K r K x C x D y
y Cx D K r K x C x D y
x A x B y
% % % %
% % % %
% %
Reagrupando trminos y despejando se llega al siguiente resultado:
( ) ( ) ( ) ( ) ( )
(( 1) ) ( ) ( ) ( )
( )
(( 1) ) (
D D D
o x o o r o
R R
D D
o x x o o
R R R R R
D
r r o
R
o x
R R
kT kT kT kT
k T kT kT
kT
k T
= - - +
+ = - - - + - +
+ -
+ = -
y N C DK x NDC x NDK r
x A BK BD N C DK x BD NDC BC x
BK BD NDK r
x B N C DK
% % % % %
% % % % % % % % % % % %
% % % %
% % %
) ( ) ( ) ( )
D D
o o r o
R R R R R
kT kT kT
+ - +
x A B NDC x B NDK r
% % % % % %
De esta manera se obtiene el siguiente modelo en lazo cerrado de un sistema con un
regulador de realimentacin del estado esttico, realimentacin de la salida dinmico
y regulador de prealimentacin:
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
83
( ) (( 1) ) ( )
(( 1) ) ( )
( )
( )
D D
x x o o R R R R
o o
x R R
R R R R
r r
R
D
o
r
R
k T kT
k T kT
kT
- - - - +
= +
+
- -
-
+
A BK BD N C DK BD NDC BC x x
x x
B N C DK A B NDC
BK BD NDK
r
B NDK
y
% % % % % % % % % % % %
% % % % % % %
% % % %
% %
1
( )
( ) ( ) ( )
( )
donde, ( )
D
o
D D
o x r o
R
o
R
R
N
kT
kT kT
kT
-
= - - +
= +
x
N C DK NDC NDK r
x
N I DD
% % % % %
% %
(4.6)
Para el caso de una realimentacin esttica de la salida, la ecuacin anterior se puede
simplificar. En este caso,
, , ,
y
R R R R
= = = = A 0 B 0 C 0 D K
% % % %
El modelo multifrecuencia respectivo es,
( )
( )
( )
(( 1) ) ( )
( )
( ) ( ) ( )
D D
o x y y x o
D
r y r o
D D D
o x o r o
k T kT
kT
kT kT kT
+ = - - + +
+ -
= - +
x A BK BK NC BK NDK x
BK BK NDK r
y NC NDK x NDK r
% % % % % %
% % %
% % %
(4.7)
Adems, si se considera un esquema de muestreo FOLI (Fig. 4.4, Pgina 81,
, = = D 0 N I
%
) y una realimentacin del estado solamente (
y
= K 0), se tiene:
( )
(( 1) ) ( ) ( )
( ) ( )
D D D
o x o r o
D D
o o
k T kT kT
kT kT
+ = - +
x A BK x BK r
y C x
% % %
% (4.8)
Igualmente, si se considera un esquema de muestreo FOLI ( , = = D 0 N I
%
, Lema 4.1,
Fig. 4.4) y una realimentacin de la salida solamente (
x
= K 0 ), se tiene:
( )
(( 1) ) ( ) ( )
( ) ( )
D D D
o y o r o
D D
o o
k T kT kT
kT kT
+ = - +
x A BK C x BK r
y C x
% % % %
%
(4.9)
Las dimensiones de las matrices se dan en (4.1).
El diseo con dos grados de libertad se utiliza en el mtodo de rediseo o mapeo del
modelo, desarrollados en el epgrafe 4.3.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
84
4.2.3. Condiciones del diseo
En los siguientes epgrafes se partir de las ecuaciones anteriores para el diseo de
diferentes tipos de reguladores multifrecuencia. Es importante resaltar que las
deducciones anteriores son comunes para todos los mtodos, por lo que stos pueden
parecer muy resumidos.
Se desarrollarn a continuacin mtodos de control relacionados con los siguientes
aspectos:
Rediseo de reguladores continuos o discretos monofrecuencia (a perodo base).
Mapeo del modelo o cancelacin. Se busca que la respuesta en lazo cerrado
coincida con la de un modelo de referencia o unas especificaciones dadas.
Ubicacin de polos.
Explotacin del muestreo irregular para efectos de la simplificacin de los clculos
y mejoramiento del comportamiento del sistema en lazo cerrado.
Eliminacin del rizado intermuestreo.
4.3. REDISEO DIGITAL DE REGULADORES CONTINUOS. MAPEO DEL
MODELO
4.3.1. Ideas preliminares
El mtodo ms sencillo pero inexacto de diseo de reguladores multifrecuencia
consiste en la discretizacin directa de reguladores continuos (estticos o dinmicos
con uso de retenedores de orden cero) obtenidos previamente. Este tema ha sido
tratado por varios autores [80] y se menciona aqu brevemente. La idea general
consiste en discretizar un regulador continuo o de tiempo discreto monofrecuencia (a
perodo base T definido en el epgrafe 3.2), aplicando el modelo multifrecuencia
(3.21). Ver el ejemplo 5.4.3.
En particular, la discretizacin de un regulador esttico continuo es, aplicando el
modelo multifrecuencia (3.21):
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
85
,
, 1
1
1
,
, si 0 -
0, en otro caso
D D D
ij ij ij
ij i j j
ij
f
f l l l
f
+
=
=
= =
<
F F F
%
% %
(4.10)
Es decir, el regulador multifrecuencia esttico discretizado (con retenedores de orden
cero a la salida) a partir de un regulador continuo esttico, corresponde a un
regulador continuo metido entre un mar de ceros (ver al final del ejemplo 5.4.3).
La discretizacin multifrecuencia de reguladores continuos (o rediscretizacin de
reguladores discretos monofrecuencia a perodo base) asegura la causalidad del diseo
(el modelo multifrecuencia en s es causal), no presenta problemas de rizado (este
aspecto se explica mejor en el epgrafe 4.5) y conserva todas las caractersticas de la
discretizacin monofrecuencia (por medio de la transformacin bilineal, aproximacin
de Euler, etc.), adems de otras adicionales:
La aproximacin es mejor en cuanto menores sean los perodos de muestreo de las
diferentes seales. Existen ciertos valores ptimos para dicha discretizacin, por
fuera de los cuales hay una prdida de las prestaciones del regulador. Un completo
estudio de este comportamiento para sistemas multifrecuencia lo da Salt [67]. En
el caso multifrecuencia es posible mejorar la respuesta de un regulador discreto
monofrecuencia, tal y como se muestra en [69]. Por ejemplo, un regulador PID
digital al llevarlo a multifrecuencia puede mejorar sus prestaciones.
Si el perodo de muestreo es demasiado largo, la discretizacin del regulador
continuo no asegura la estabilidad en lazo cerrado del sistema. Si se utiliza un
esquema de muestreo multifrecuencia irregular es posible lograr la estabilidad en
lazo cerrado cuando se tienen restricciones de muestreo en la salida de una planta
y con dichas restricciones el regulador monofrecuencia correspondiente da un
comportamiento inestable.
La escala de frecuencias se distorsiona.
En general, es difcil hacer coincidir los estados del sistema digital a los del
sistema continuo original. Una solucin es el rediseo en lazo cerrado que se
explica ms adelante en este mismo epgrafe.
Otro enfoque ([9],[46],[97],[98]) propone mtodos para el rediseo de reguladores
continuos con base en las caractersticas en lazo cerrado (problema de rediseo
digital). Es decir, mtodos en los cuales se pretende disear un regulador discreto
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
86
(realimentacin del estado o de la salida) que permita obtener una respuesta en lazo
cerrado con un comportamiento coincidente en los instantes de muestreo con la
respuesta con el regulador continuo. En particular, que permita que todos los estados
del sistema muestreado en lazo cerrado coincidan con los estados del sistema original
continuo en todo instante de muestreo. En estos mtodos el regulador continuo
original es del tipo de realimentacin del estado.
Sin embargo, los distintos mtodos propuestos (monofrecuencia) no aseguran, en
general, el comportamiento deseado (estabilidad en lazo cerrado y respuesta
temporal), debido a que son mtodos aproximados. La aproximacin surge debido a
que no siempre es posible el despeje directo de las matrices de diseo (generalmente
la dimensin del vector de entradas es menor que la del estado) y es necesario recurrir
a algoritmos aproximados para el clculo de dichos reguladores (ver, por ejemplo,
[54]).
El enfoque de rediseo digital puede ser tratado como un problema de mapeo o
emparejamiento del modelo (model matching), donde el modelo deseado (modelo de
referencia) puede ser el modelo en lazo cerrado obtenido con un regulador continuo.
La idea principal del mtodo del mapeo del modelo consiste en especificar un modelo
deseado en lazo cerrado (continuo o discreto), el cual puede obtenerse a partir de:
Ciertas especificaciones de diseo.
Reduccin de un diagrama en lazo cerrado con un regulador continuo
(discretizacin en lazo cerrado).
En resumen, el mtodo de mapeo o emparejamiento del modelo consiste en obtener
un controlador para una planta dada de manera que el sistema en lazo cerrado est
caracterizado por un modelo de referencia deseado. A estos reguladores se les conoce
tambin como reguladores de cancelacin o reguladores mediante igualacin o
acoplamiento a un modelo [57].
El diseo de un controlador convencional por mapeo del modelo requiere de una
cancelacin de los ceros de la planta, por lo que no es aplicable a plantas de fase no
mnima. Sin embargo, en el caso de reguladores multifrecuencia se puede llegar a un
diseo semejante sin una cancelacin directa de los ceros, pudindose aplicar a
plantas de fase no mnima (ver comentarios abajo). Adems, como es posible
aumentar el nmero de entradas del modelo multifrecuencia (lifting), se puede
siempre seleccionar un esquema de muestreo de manera que las matrices necesarias
sean cuadradas. La desventaja es la presencia de rizado y grandes sobreimpulsos en la
respuesta temporal debido a los cambios bruscos en la seal de control del regulador
multifrecuencia.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
87
En el caso multifrecuencia se han propuesto mtodos de rediseo en lazo cerrado
([23],[64],[95]) y de mapeo del modelo ([18],[35]). La idea general consiste en ampliar
el nmero de entradas de manera que las matrices obtenidas sean cuadradas y su
inversin sea un proceso sencillo.
Fujimoto y otros [23] obtienen un mtodo de rediseo a partir de un regulador de
realimentacin del estado y aplicacin de un esquema de muestreo MRIC
(posiblemente irregular, aunque no tratan explcitamente ese caso). El enfoque es
semejante al presentado a continuacin, pero con una estructura de control y unos
clculos ms complejos. El mapeo se logra con un regulador dinmico. Se deja como
tema abierto la seleccin ptima del esquema de muestreo irregular.
El rediseo digital ptimo se trata en [64]. La discretizacin multifrecuencia de
controladores continuos se considera utilizando diferentes criterios de optimizacin,
teniendo en cuenta la restriccin de causalidad. El rediseo se hace desde la
perspectiva de los mtodos convencionales de discretizacin, generalizados para
esquemas multifrecuencia. Se utilizan reguladores de realimentacin de la salida. El
mapeo es bueno, pero no total.
Colaneri y Kucera [18] tratan el problema de mapeo del modelo para sistemas
peridicos a partir del equivalente LTI obtenido por la tcnica del lifting. Se resalta
la posibilidad de mapear un sistema peridico a un sistema invariable en el tiempo
por medio de una realimentacin del estado.
Una completa descripcin de las posibilidades del muestreo multifrecuencia en el
mtodo de mapeo de modelo la dan In y Zhang en [35]. El regulador que disean
puede realizar una asignacin arbitraria de polos y ceros y mapeo del modelo, incluso
con ceros inestables, para plantas SISO. El comportamiento intermuestreo es bueno.
El respectivo regulador multifrecuencia (dinmico, MRIC, estable, de realimentacin
de la salida) se da al mximo comn divisor de todos los perodos de muestreo del
sistema, por lo que es factible un tratamiento en trminos de funcin de transferencia.
4.3.2. Deduccin del mtodo
A continuacin se presenta un mtodo de mapeo del modelo que tiene la mayora de
caractersticas de los mtodos anteriores, pero que adems es fcil de entender e
implementar. Sus propiedades se discuten al final.
Se considera una planta MIMO controlable y observable y un esquema de muestreo
FOLI (Fig. 4.4). La mayora de clculos preliminares se realizaron en los epgrafes
anteriores. La ventaja del esquema de muestreo FOLI radica en que = D 0
%
(Lema
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
88
4.1) y siempre es posible obtener matrices B
%
y C
%
de rango completo e incluso
cuadradas, con lo que la operacin de inversin de dichas matrices es siempre posible.
El modelo en lazo cerrado de un sistema con un regulador multifrecuencia FOLI
esttico
y
K de realimentacin de la salida se da en la ecuacin (4.9) y se repite a
continuacin:
( )
(( 1) ) ( ) ( )
( ) ( )
D D D
o y o r o
D D
o o
k T kT kT
kT kT
+ = - +
x A BK C x BK r
y C x
% % % %
%
N N N N
r y
K K
(4.11)
Se desea obtener un comportamiento en lazo cerrado dado por el siguiente modelo de
referencia:
(( 1) ) ( ) ( )
( ) ( )
D D D
o o o
d d
D D
o o
d
k T kT kT
kT kT
+ = +
x A x B r
y C x
% %
% (4.12)
Se ve claramente que N N = .
El modelo deseado corresponde a un modelo multifrecuencia a perodo global. Existen
varias posibilidades de obtener el modelo deseado:
Ubicando los polos y ceros en continuo y discretizando en un esquema
multifrecuencia (semejante al de la planta) el modelo a perodo global. Este es el
mtodo ms claro y directo para plantas SISO.
Discretizando en un esquema multifrecuencia el sistema en lazo cerrado con un
regulador satisfactorio, continuo o discreto a perodo base. Este es el mtodo ms
claro y directo para plantas MIMO.
Especificando directamente el modelo multifrecuencia deseado a perodo global
(poco claro, ya que para un sistema SISO el respectivo modelo sera uno MIMO).
Se considera aqu que los modelos estn en una forma tal que:
d
= C C
% %
(4.13)
Esta ltima condicin es fcil de cumplir si se utiliza la siguiente transformacin
lineal de las variables de estado en el modelo deseado (la deduccin es directa si se
compara el modelo deseado transformado con el modelo multifrecuencia de la planta):
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
89
*
1
d
-
=
=
x Tx
T C C
% % (4.14)
La matriz C
%
se puede invertir siempre que se cumplan las condiciones que se
especifican ms adelante.
Comparando las ecuaciones (4.11) y (4.12) se llega a las siguientes igualdades:
y
d
r
d
- =
=
A BK C A
BK B
% % % %
% % (4.15)
Teniendo en cuenta que el modelo multifrecuencia con offset de las entradas es de
orden (n + m) y de acuerdo a lo expuesto en el epgrafe 3.4.3 (condiciones para el
rango completo de las matrices), se selecciona aqu 1
j j
N n = +
%
% (
j
n% son los ndices
de controlabilidad de la planta continua) y 1
i i
N n = + (
i
n son los ndices de
observabilidad de la planta continua), de manera que en la planta multifrecuencia las
matrices
( ) ( ) n m n m + +
B
%
y
( ) ( ) n m n m + +
C
%
son matrices cuadradas de rango
completo.
Es fcil de despejar de la ecuacin (4.15) las matrices ,
y r
K K :
1 1
1
( )
y
d
r
d
- -
-
= -
=
K B A A C
K B B
% % % %
% % (4.16)
El clculo de las matrices del regulador no considera ninguna aproximacin, es un
clculo exacto. El buen condicionamiento de la matriz C
%
se puede lograr con una
adecuada seleccin del esquema de muestreo de acuerdo a lo expuesto en el epgrafe
3.4.3.
4.3.3. Caractersticas del mtodo
El mtodo es aplicable a plantas MIMO estables e inestables. En el ejemplo 5.4.4
se muestra la aplicacin del mtodo propuesto.
El clculo de las matrices del regulador es sencillo y directo (multiplicacin e
inversin de matrices) ya que las matrices son cuadradas. Si se toman ms
muestras de las necesarias puede utilizarse el clculo de pseudoinversas (en el
contexto de los sistemas compartidos no se justifica tomar ms muestras de las
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
90
necesarias, por razones de optimizacin de los recursos). Se puede implementar
fcilmente el mtodo en un programa de cmputo como MATLAB. De hecho,
para el clculo de dicho controlador se dise un programa en MATLAB, el cual
se muestra en el captulo de ejemplos.
El regulador diseado es completamente causal, debido al esquema de muestreo
seleccionado (FOLI), en el cual toda accin de control se basa en muestras de las
salidas en instantes anteriores (ver Fig. 4.4).
La aplicacin del mtodo a sistemas distribuidos con un medio de comunicacin
compartido es posible slo con el mtodo de modelado presentado en el presente
trabajo. Es de resaltar la forma en que se maneja el esquema de muestreo con
fines de lograr: el rango completo de las matrices, la causalidad y la sencillez de
los clculos ( = D 0
%
e inversin de matrices).
Aunque el diseo es sencillo existe una diferencia entre el modelo deseado y el
obtenido, ya que el regulador multifrecuencia contiene un retardo debido al offset
de las entradas. Este retardo se puede disminuir si se reduce el tiempo en el cual
se aplica la primera seal de control. Sin embargo, en sistemas distribuidos con un
medio de comunicacin compartido dicho retardo es inevitable.
El esquema de muestreo MRIC es un caso particular del esquema FOLI, pero con
menos libertad en el diseo. En este caso el diseo es semejante al expuesto aqu si
se considera una realimentacin del estado y no de la salida. En este caso
particular no hay offset de las entradas del modelo multifrecuencia y, debido a que
se utiliza un regulador esttico, el modelo de referencia es del mismo orden de la
planta y contiene un nmero de entradas y salidas igual a p, nmero de salidas de
la planta. Es decir, el modelo de referencia es de fcil interpretacin desde el
punto de vista del control convencional.
4.3.4. Procedimiento general
El mtodo se puede aplicar siguiendo estos pasos:
1. Especificar los modelos internos de la planta y de referencia, en tiempo continuo o
discreto a perodo base.
2. Determinar el vector de ndices de controlabilidad CIV y el vector de ndices de
observabilidad OIV (Definicin 3.2). Seleccionar los perodos de muestreo de las
entradas y salidas de manera que 1
j j
N n = +
%
% y 1
i i
N n = + , respectivamente.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
91
3. Definir el esquema de muestreo multifrecuencia acorde con un esquema FOLI
(primero se toman todas las muestras de las salidas y luego de las entradas).
Disminuir el offset de las entradas al mnimo posible.
4. Calcular los modelos multifrecuencia de la planta y de referencia aplicando el
mtodo desarrollado en el trabajo. Como el modelo deseado debe incluir offset
( ( )
D
o
x kT ), se debe muestrear el respectivo modelo continuo utilizando el esquema
de muestreo de la entrada de la planta.
5. Transformar el modelo de referencia multifrecuencia de acuerdo con (4.15) de
manera que
d
= C C
% %
.
6. Calcular el regulador de acuerdo a la ecuacin (4.16).
Este procedimiento se implement en una macro de MATLAB.
4.4. MTODO DE ASIGNACIN DE POLOS
4.4.1. Ideas preliminares
Un mtodo semejante al que se presenta a continuacin fue desarrollado por varios
autores ([22],[60]) para el caso de muestreo MRIC regular. Aqu se obtiene el
respectivo regulador esttico para el caso de muestreo irregular con o sin offset a
partir del modelo (3.35) propuesto en el trabajo. Adems de eso, se generaliza el
diseo para un esquema FOLI que permite aplicar mtodos convencionales de
realimentacin del estado. El esquema MRIC es un caso particular del esquema
FOLI. El sistema con esquema MRIC se muestra en la siguiente figura.
Fig. 4.5 Regulador de asignacin de polos por realimentacin de la salida en un esquema MRIC con
regulador esttico
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
92
El caso del MRIC con offset en las acciones de control puede aplicarse para el control
de un sistema con muestreo en serie - un caso no estudiado anteriormente en la
literatura.
El contexto de aplicacin de este mtodo es semejante al mtodo del mapeo del
modelo expuesto anteriormente: sistemas distribuidos de control con medio
compartido de comunicacin. Se tiene entonces un esquema de muestreo FOLI o su
caso particular MRIC (las entradas de la planta se muestrean de manera rpida e
irregular, mientras que todas las salidas se muestrean de manera lenta a perodo
global
o
T ).
Los esquemas de muestreo FOLI y MRIC no presentan problemas de causalidad.
Anteriormente Moore [56] hizo un anlisis de los reguladores MRIC para el caso de
muestreo regular y mostr que por medio de un regulador multifrecuencia es posible
obtener una asignacin de polos bajo supuestos ms suaves de la planta: i) se pueden
usar controladores de ms bajo orden que reguladores monofrecuencia; ii) la ubicacin
de polos puede hacerse con compensadores estticos (constantes) si se selecciona el
nmero adecuado de muestras (Lema 3.3); iii) el nmero de entradas y salidas puede
ser arbitrario (para un sistema monofrecuencia el problema de asignacin de polos por
realimentacin de la salida con un regulador esttico slo se pueden ubicar
min( 1, ) m p n + - polos, siendo m y p el nmero de entradas y salidas y n el orden
del sistema, tal y como se haba establecido).
Por las razones anteriores y por la clara utilidad de esquemas MRIC en procesos
industriales (donde el muestreo de las salidas puede ser lento debido a razones
tecnolgicas, mientras las seales de entrada de los actuadores pueden ser
generalmente ms rpidas), este tipo de controladores es muy apreciado. La
introduccin de un muestreo irregular y un esquema FOLI pretende adicionar un
grado de flexibilidad mayor y dar la posibilidad de buscar un mejor comportamiento
del sistema en lazo cerrado, en comparacin con otros sistemas de control semejantes.
4.4.2. Deduccin del mtodo
A continuacin se deduce el respectivo regulador multifrecuencia. Gran parte de la
deduccin lgica se realiz en epgrafes anteriores. Partiendo de esos resultados se
define fcilmente la forma del regulador multifrecuencia.
Teniendo en cuenta que la discretizacin de la planta (con D = 0
%
) corresponde a un
modelo FOLI o MRIC, se puede simplificar la ecuacin (4.5). Se obtiene el siguiente
modelo en lazo cerrado:
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
93
(( 1) ) ( ) ( ) ( )
( ) ( )
D D D
o o o
D D
o o
k T kT kT
kT kT
+ = - +
x A BFC x BFr
y Cx
% % % % % %
% (4.17)
En el caso MRIC:
(( 1) ) ( ) ( ) ( )
( ) ( )
D
o o o
D
o o
k T kT kT
kT kT
+ = - +
x A BFC x BFr
y Cx
% % % % %
(4.18)
La ecuacin caracterstica del sistema en lazo cerrado es:
0
o n
z - + = I A BFC
% % % %
(4.19)
donde
N
o
z z = .
Si se selecciona el esquema FOLI de manera que C
%
sea una matriz cuadrada,
entonces se puede escribir la ecuacin anterior como:
0
o n
z - + = I A BK
% % %
(4.20)
Esta ecuacin representa la expresin habitual para el mtodo de ubicacin de polos
por realimentacin del estado para el clculo de la matriz K
%
. Una vez calculada esta
matriz, el regulador de asignacin de polos por realimentacin de la salida es:
1 -
= F KC
% % %
(4.21)
Como se mencion en el epgrafe 4.3.2, se debe seleccionar 1
j j
N n +
%
% (
j
n% son los
ndices de controlabilidad de la planta continua) y 1
i i
N n = + (
i
n son los ndices de
observabilidad de la planta continua), de manera que en la planta multifrecuencia la
matriz
( ) ( ) n m n m + +
C
%
es de rango completo.
Si en lugar del esquema ms general FOLI se utiliza un esquema MRIC (como en
Eckardt [22]), la ecuacin (4.19) es de la siguiente forma, muy semejante a la
expresin original pero sin posibilidades de manejo de las dimensiones de la matriz C
por medio del esquema de muestreo:
0
o n
z - + = I A BFC
% % %
(4.22)
Esta ecuacin se puede resolver por mtodos numricos adecuados ([53], [54]).
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
94
En el caso = C I , se tiene un problema de realimentacin del estado. La ecuacin se
reduce a la forma ms simple:
0
o n
z - + = I A BF
% % %
(4.23)
Como puede verse la flexibilidad matemtica es interesante en el muestreo FOLI.
4.4.3. Caractersticas del mtodo
El diseo propuesto slo es posible con la aplicacin de un mtodo de modelado
como el presentado en el trabajo actual. Es de resaltar la forma en que se maneja
el esquema de muestreo con fines de lograr una sencillez de los clculos ( = D 0
%
e
inversin de matrices).
El mtodo permite hallar un regulador de realimentacin de la salida a partir de
la realimentacin del estado, obviando la necesidad de construir un observador de
estado (la idea de pseudo - medicin expuesta en el epgrafe 3.5.7).
Para el caso MRIC, la ecuacin (4.22) corresponde a un problema convencional de
asignacin de polos por realimentacin de la salida. Existen diversos algoritmos y
programas para su solucin. En [54] se da una adecuada descripcin y solucin al
problema. La implementacin numrica en MATLAB/SIMULINK se hace en [53].
El problema de asignacin de polos por realimentacin de la salida tiene solucin
si m p n + . Para el diseo en el caso SISO tambin puede ser til el trazado
del lugar de las races; en el trabajo se elabor y aplic una funcin de MATLAB
para tal fin (ver epgrafe 5.3).
El nmero de incgnitas es igual a Np (nmero de variables en
N p
F
%
). El nmero
de ecuaciones es igual a n (orden del sistema y del polinomio caracterstico). De
esta manera, para la expresin (4.19) tenga solucin se debe cumplir la siguiente
condicin: Np n . De otro lado, el problema de asignacin de polos tiene
solucin si rank( ) n = B
%
. Para cumplir con este requisito se debe muestrear de la
siguiente manera
j j
N n
%
% (Ver Lema 3.3), donde,
j
n% es el ndice de
controlabilidad. Esta condicin incluye la anterior.
El mtodo admite para el caso MRIC, de manera directa, el muestreo irregular
con o sin offset (en el caso de muestreo irregular con offset crece la dimensin del
vector de estados). El regulador de Eckardt y sus condiciones se obtienen aqu,
como un caso particular de muestreo regular, de una manera sencilla y directa. El
diseo planteado sigue la filosofa inicial planteada en el trabajo: adaptar mtodos
de control monofrecuencia al caso multifrecuencia y con generalizacin a esquemas
irregulares de muestreo, como el muestreo en serie. Ver ejemplo 5.4.5.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
95
Para un sistema monofrecuencia el problema de asignacin de polos por
realimentacin de la salida con un regulador esttico no es posible si m p n +
[54]. Slo se pueden ubicar min( 1, ) m p n + - polos (condicin de asignacin). Al
pasar el problema a multifrecuencia se introducen entradas y salidas ficticias
(vectores estirados) que permiten que el problema de asignacin de polos sea
factible. En el caso SISO del ejemplo 5.4.5 se tiene que 2 , 1 y 1 n p m = = = ,
de manera que no es posible ubicar los polos con un regulador esttico
monofrecuencia (fcil de construir); sin embargo, en un esquema multifrecuencia
se puede obtener una entrada adicional que le da salida al problema.
La salida de la planta con este regulador presenta problemas de rizado (fenmeno
no deseado). Este fenmeno se explica en el epgrafe 4.5, donde se da una solucin
alternativa al problema con el uso de integradores.
El diseo da mejores respuestas para sistemas de fase no mnima o inestables que
mtodos semejantes como el de Eckardt [22] (ver ejemplo 5.4.8). Sin embargo, en
general, se conservan muchos problemas en el comportamiento del sistema.
La realizacin del regulador FOLI o MRIC es completamente causal, como
siempre sucede con estos reguladores. Por ello el respectivo diseo es
completamente realizable.
El caso de realimentacin del estado se considera como un caso particular cuando
= C I . Las ecuaciones (4.20) y (4.23) se pueden resolver por mtodos conocidos
para sistemas convencionales. Por ejemplo, en MATLAB se tiene la funcin
PLACE. Es interesante destacar que en este caso el diseo puede no llevar a un
sistema con rizado; si se aplica el mtodo de realimentacin de la salida, s se
presenta un rizado en la respuesta temporal. Este hecho muestra que este
fenmeno indeseado puede resolverse con un correcto diseo. El ejemplo 5.4.10
ilustra este aspecto con ms detalle (ver especialmente la Fig. 5.35).
4.4.4. Procedimiento general
Los pasos para la aplicacin de este mtodo son bastante simples:
1. Definir el esquema de muestreo FOLI o MRIC (regular o irregular) de la planta
(SISO o MIMO). Determinar el vector de ndices de controlabilidad CIV y el
vector de ndices de observabilidad OIV (Definicin 3.2). Seleccionar los perodos
de muestreo de las entradas y salidas de manera que 1
j j
N n +
%
% y 1
i i
N n = + ,
respectivamente.
2. Especificar la ubicacin deseada de los polos a perodo global.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
96
3. Obtener el modelo multifrecuencia de la planta.
4. Calcular el regulador a partir del modelo multifrecuencia de la planta, utilizando
mtodos convencionales de ubicacin de polos por realimentacin de la salida o del
estado. En el caso FOLI aplicar luego la ecuacin (4.21).
Este procedimiento se implement en una macro de MATLAB.
4.5. PROBLEMA DE RIZADO EN ESQUEMAS MRIC. ELIMINACIN DEL
RIZADO CON INTEGRADORES
La salida de la planta con reguladores de asignacin de polos en esquemas MRIC o
semejantes presenta rizado (fenmeno no deseado). Por este hecho, este regulador en
su forma original no ha sido recomendado para aplicaciones industriales. Araki y
Hagiwara [7] y Tangirala ([76],[75]) hacen un anlisis del problema anterior con
muestreo regular.
La explicacin fsica al problema de rizado se discute a continuacin (se hace para un
sistema SISO, pero extensible al caso MIMO). El rizado se debe a la forma de diseo
directo de los reguladores multifrecuencia, la cual estira una accin de control y
considera cada una de ellas de manera independiente, sin tener en cuenta que algunas
de ellas corresponden a la misma accin de control fsica. Este olvido lleva a
problemas indeseados debido a que no hay nada que restrinja los cambios bruscos de
cada entrada estirada. Este rizado aparece tanto en la respuesta estacionaria como
transitoria.
El problema lo explica Tangirala ([76],[75]) matemticamente como una consecuencia
de la diferencia entre las ganancias en estado estacionario de la matriz de funciones
de transferencia multifrecuencia de la planta o, lo que es equivalente (el regulador se
calcula a partir del modelo de la planta), a valores finales distintos de cada una de las
acciones de control del vector estirado (la misma accin de control fsica se
estabiliza en valores diferentes). Tangirala propone (para el caso SISO) la utilizacin
de un integrador a muestreo rpido en la entrada de la planta. Cabe anotar que dicha
solucin aplica para la respuesta estacionaria, pero no para la respuesta transitoria,
ya que cada accin de control se sigue aplicando de manera independiente (ver Fig.
5.23).
El problema en mencin se puede empeorar si adems se tienen esfuerzos de control
grandes. Por tanto, y como en el caso monofrecuencia, las oscilaciones se pueden
reducir o eliminar si se ubican los polos en lugares no muy distantes de los polos
originales, disminuyendo la accin de control necesaria para dicha ubicacin.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
97
El esquema MROC no presenta este problema pues las salidas del regulador no se
expanden. La discretizacin de reguladores continuos, la rediscretizacin
multifrecuencia de reguladores discretos a perodo base o el rediseo en lazo cerrado
tampoco conllevan a un rizado, debido a que el diseo no se hace a partir del modelo
multifrecuencia de la planta (con diferencias en las ganancias), sino del modelo
continuo o monofrecuencia (slo se retienen las acciones de control un intervalo
mayor al perodo base). En todos estos casos la accin de control se aplica de manera
suave.
En sntesis, el fenmeno del rizado no es un problema intrnseco de los esquemas
MRIC multifrecuencia, sino una falla del mtodo de diseo adoptado. Es as como se
han propuesto mtodos de diseo que dan buenos reguladores, muchos de ellos con un
enfoque de optimizacin. Se busca obtener acciones de control suaves que conecten de
alguna manera las acciones de control del vector estirado correspondiente. Araki [8]
plantea algunas soluciones encontradas en la bibliografa para eliminar el rizado. De
esta manera, se pueden reunir las diferentes propuestas en las siguientes:
Usar un observador diseado por el mtodo LQG, esto es, un filtro de Kalman.
Fijar la estructura del regulador y optimizar los parmetros con respecto a cierto
criterio. Los ejemplos numricos muestran que los perodos de muestreo deben ser
lo suficientemente grandes para obtener buenos resultados [8].
Usar la idea del control predictivo generalizado: usar las N muestras de la accin
de control que minimicen la integral cuadrtica de tiempo finito.
Realizar el diseo a perodo global, pero con las matrices de diseo a perodo base.
El regulador obtenido est a perodo base y al rediscretizar a multifrecuencia se
obtienen las caractersticas deseadas. Esta en la idea general aplicada por In y
Zhang [35].
Adicionar filtros con caractersticas integradoras. Este es un mtodo sencillo de
aplicar para eliminar el rizado en estado estacionario.
Surge la inquietud de si el muestreo irregular puede contribuir al mejoramiento del
problema del rizado. Un simple ejemplo muestra que entre todas las posibilidades de
muestreo irregular, la que da una relacin ms cercana a uno de las ganancias en
estado estacionario, corresponde al muestreo regular. Es decir, el muestreo irregular
empeora el problema del rizado, bajo las mismas condiciones de diseo (ejemplo
5.4.9). Lo que s puede mejorar el muestreo irregular es, entre otras cosas [19], el
rango o la condicin de las matrices del modelo multifrecuencia.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
98
A continuacin se presenta el mtodo de utilizacin de filtros integradores al diseo
por asignacin de polos (epgrafe 4.4), el cual extiende la idea de Tangirala [75] y
Eckardt [22] al muestreo irregular y plantas MIMO. El procedimiento general es el
siguiente:
La planta con m entradas se discretiza con un esquema multifrecuencia de manera
que se cumplan las condiciones del mtodo de diseo (
j j
N n
%
% , ndices de
controlabilidad), teniendo en cuenta que debido a la inclusin de integradores el
orden de la planta es ahora (n + m).
Obtener el modelo multifrecuencia de un integrador de orden m (nmero de
entradas de la planta). Los esquemas de muestreo de entradas y salidas del
integrador son iguales y corresponden al esquema de muestreo de las entrads de la
planta. Este paso se debe realizar debido al caso general irregular y MIMO, para
el cual no funciona adicionar un integrador a la planta y luego discretizar. El
integrador continuo de orden m es (integra cada entrada): , x = u y = x & .
Conectar en serie el integrador multifrecuencia y el modelo multifrecuencia de la
planta. Con esto se logra que las ganancias en estado estacionario de las funciones
de la matriz de transferencia del regulador sean iguales:
,1 ,2 ,
(1) (1) ... (1)
R R R n
G G G = = = .
Calcular el regulador al modelo anterior integrador - planta multifrecuencia.
El regulador que se aplicar finalmente (un regulador dinmico) es la conexin del
regulador esttico y el integrador multifrecuencia.
En el ejemplo 5.4.7 se aplica el mtodo anterior a casos de muestreo regular e
irregular, SISO y MIMO, plantas con ceros inestables y efecto del esfuerzo de control
en la respuesta transitoria.
El ejemplo 5.4.10 muestra como el muestreo irregular puede mejorar el rango de las
matrices del sistema multifrecuencia y como la seleccin del mtodo de diseo (para
sistemas monofrecuencia, en este caso de ubicacin de polos por realimentacin del
estado) influye en el comportamiento intermuestreo de la respuesta en lazo cerrado.
En dicho caso un diseo de realimentacin del estado da un resultado excelente
(incluso con un regulador esttico) si se compara con el diseo por realimentacin de
la salida (teniendo en cuenta que C = I ).
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
99
4.6. CONCLUSIONES DEL CAPTULO
En este captulo se dedujeron dos mtodos generales de control multifrecuencia
(mapeo del modelo y ubicacin de polos) y se trataron aspectos de diseo y
comportamiento. El mtodo del mapeo corresponde a un diseo con dos grados de
libertad, mientras el de ubicacin de polos slo considera un grado de libertad. En
cada mtodo se aplicaron y se percibieron los problemas tpicos del diseo
multifrecuencia. Es as como paralelo a un nuevo diseo se ilustraron nociones e ideas
del control multifrecuencia en general.
Para ambos diseos propuestos se parti de un esquema FOLI, del cual el esquema
MRIC es un caso particular (la primera accin de control se hace igual a cero). El
esquema FOLI se puede estudiar nicamente con el modelo propuesto, de acuerdo a
lo que se pudo ver en la bibliografa registrada. Las principales ventajas de dicho
esquema son: cumplimiento de la restriccin de causalidad y simplificacin de los
clculos (eliminacin de trminos y obtencin de matrices de rango completo),
utilizando las respectivas ventajas de los esquemas MRIC y MROC. En el Lema 4.1
se muestra claramente que la condicin = D 0
%
, que simplifica los clculos, se cumple
slo para los casos MRIC y FOLI.
Los diferentes resultados se aplicaron al caso de muestreo MRIC con el fin de
comparar los resultados con informacin conocida y permitir el clculo del control
para un esquema de muestreo en serie de la accin de control. Se muestra como el
esquema FOLI supera al mtodo MRIC en aspectos como la ubicacin de ceros en
plantas de fase no mnima. No obstante, quedan abiertos an muchos aspectos por
investigar.
Aunque la principal aplicacin del esquema FOLI y los mtodos de control aqu
expuestos es en el mbito de los sistemas distribuidos con un medio de comunicacin
compartido, es importante resaltar la forma como se llev un problema del mbito
multifrecuencia al monofrecuencia por medio de una seleccin del esquema de
muestreo. En este caso se considera (a diferencia de otros trabajos y de acuerdo a la
propuesta de Araki [8]) que las frecuencias de accin y medida se pueden seleccionar
de acuerdo a los objetivos de diseo. El problema se reduce entonces a uno en el cual
la tcnica convencional de realimentacin del estado es siempre aplicable. Los
reguladores son, de esta manera, diseados de manera directa.
Los mtodos se implementaron en MATLAB y se ilustran en el siguiente captulo.
Los diferentes ejemplos muestran que, en general:
El diseo es sencillo y directo.
CAPTULO 4. DISEO DE REGULADORES MULTIFRECUENCIA
Modelado y simulacin de sistemas con muestreo no convencional
100
Se ubican bien los polos y ceros, aunque se puede presentar un rizado
intermuestreo, el cual se puede eliminar en la respuesta estacionaria por medio de
un integrador. En el trabajo se generaliza la idea del uso del integrador a un
muestreo irregular.
En algunas ocasiones el rizado se puede eliminar con un adecuado diseo que
tenga en cuenta aspectos como la aplicacin de mtodos exactos y esfuerzo de
control.
La ubicacin de ceros de fase no mnima es posible, ya que no hay cancelacin
directa de trminos. En comparacin con esquemas MRIC, ste es un gran paso
adelante.
Se cuenta con gran flexibilidad durante el diseo al poder seleccionar esquemas
adecuados de muestreo irregular.
Modelado y simulacin de sistemas con muestreo no convencional
101
Captulo 5. Ejemplos y
simulacin
5.1. INTRODUCCIN
En este captulo se describe el toolbox para MATLAB/SIMULINK (Multirate
Control Toolbox MCT) que se desarroll para facilitar el estudio de los mtodos de
control multifrecuencia desarrollados en el trabajo. Con ayuda del Toolbox se
resuelven y simulan los problemas planteados a lo largo del trabajo. La simulacin es
sencilla y los diagramas se construyen de acuerdo a las reglas para sistemas
monofrecuencia.
El programa CC [79] permite la simulacin de sistemas multifrecuencia SISO y
MIMO utilizando el mtodo de Kranc (esquema de muestreo regular). All los
clculos y simulaciones se realizan utilizando la lnea de comandos directamente o a
travs de macros.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
102
Para MATLAB/SIMULINK ([86], [87]) no existen herramientas de simulacin de
sistemas multifrecuencia con el alcance planteado aqu: representacin en variables de
estado para sistemas SISO y MIMO, simulacin hbrida (posibilidad de ver el efecto
intermuestreo en la respuesta temporal de la planta), simulacin multifrecuencia con
reguladores continuos o discretos a mximo comn divisor (sin necesidad de realizar
el paso previo de discretizacin) y reguladores discretos multifrecuencia (calculados de
manera directa por algn mtodo de diseo), implementacin de distintos esquemas
de muestreo (regular o irregular, MRIC o MROC, en serie, etc.), implementacin
semejante a la de sistemas monofrecuencia (los operadores de vectorizacin y
reduccin se incluyen en cada bloque, de manera que estos procesos quedan ocultos al
usuario).
El MATLAB/SIMULINK ofrece la posibilidad de simular sistemas multifrecuencia en
tres sentidos:
1. Definir bloques en un diagrama de simulacin con diferentes perodos de muestreo
(ver [87], pgina 10-10). Este caso es poco interesante para la mayora de casos
que se trata: anlisis, diseo, seleccin del perodo de muestreo, etc. Es decir, se
pueden simular sistemas de tiempo discreto con diferentes perodos de muestreo en
el mismo diagrama.
2. Utilizar el mtodo de descomposicin de interruptores (ver epgrafe 2.6.1). Esta
opcin es til en el caso cuando un sistema multifrecuencia se puede representar
fcilmente por medio de funciones de transferencia.
3. Por medio de la programacin de las llamadas S-Function (ver [87], pgina 8-46).
Esta es la opcin ms potente y til. La idea recomendada en [87] consiste en
definir una serie de perodos de muestreo por medio de la funcin
ssSetSampleTime() y manejados por la macro ssIsSampleHit que determina si
el tiempo actual es un evento de muestreo para un tiempo de muestreo especfico.
En la S-Function se puede encapsular el cdigo que define el comportamiento con
una sentencia que determina si un evento de muestreo ha ocurrido en el valor de
tiempo actual: if ssIsSampleHit() {}. No se ve claramente como puede
adaptarse este mtodo a la idea general del lifting, de la utilizacin de la
representacin invariable en el tiempo y de la definicin de un perodo global. El
manejo es complejo e inimaginable para un muestreo irregular. Por ejemplo, con
ssSetSampleTime(S,1,0.25) se define el perodo de 0.25 (0,0.25,0.5,0.75,), pero,
y si no se desea hacer nada a los 0.5 seg (muestreo irregular)? El autor del
presente trabajo no conoce casos prcticos de aplicacin de este enfoque de una
manera verstil (se mencionan ejemplos muy simples, parecidos al caso 1, en los
cuales se selecciona la salida de un bloque en dependencia del instante del
tiempo). En todo caso, la idea requiere de todo un desarrollo que puede y debe
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
103
llevar a un producto con caractersticas semejantes al ya desarrollado en este
trabajo, el cual se presenta como una interesante y novedosa posibilidad.
En el presente trabajo, la simulacin de sistemas multifrecuencia con el Toolbox se
realiza utilizando las S-Function (no con el enfoque 3 anterior), las cuales permiten
trabajar de una forma ms flexible con los parmetros de un sistema dinmico
(condiciones iniciales, dimensiones de las matrices, nmero de entradas y salidas,
estados continuos y discretos, perodos de muestreo, almacenamiento de estados y
condiciones, etc.). Aunque la estructura de programacin de una S-Function es
bastante estndar (sfuntmpl.m es una plantilla documentada de MATLAB que sirve
de punto de partida), sus posibilidades son casi ilimitadas, dndole una gran
posibilidad de extensin al MATLAB/SIMULINK. Sin embargo, la utilizacin de
estas funciones sera poco prctica si no se tuviera la posibilidad de esconder
(enmascarar) los detalles de programacin a un usuario normal. Este proceso se puede
hacer utilizando la opcin de enmascaramiento (mask) del SIMULINK. Una
mscara es una caja de dilogo que solicita la informacin exacta requerida para los
clculos; detrs de la mscara se realizan los clculos intermedios y se llaman las
funciones necesarias. La combinacin de S-Functions con la opcin de
enmascaramiento hace del Multirate Control Toolbox una herramienta potente y de
fcil uso.
Existen algunas herramientas adicionales para el anlisis y diseo de sistemas
multifrecuencia en MATLAB. En [61] se desarrollan funciones orientadas
especialmente al diseo (control ptimo), utilizando la lnea de comandos del
MATLAB y una interfaz grfica (GUI) con un esquema de control fijo (un grado de
libertad). Como mtodo de modelado multifrecuencia se utiliza el lifting operator.
El usuario ingresa, entre otros parmetros, el modelo multifrecuencia de la planta y
los perodos de muestreo de cada variable. Slo se permite el muestreo regular y no es
posible armar diagramas de simulacin ms generales y complejos. Otras desventajas
radican en la necesidad de especificar el modelo multifrecuencia de la planta y en
utilizar el esquema general de un regulador ptimo. A diferencia de estas
herramientas, en esta tesis se desarrollan bloques de simulacin flexibles y fciles de
configurar de acuerdo a cualquier tipo de esquema de control, utilizando cualquier
esquema de muestreo (regular o irregular, con sincronizacin o sin sincronizacin cada
perodo global).
El Multirate Control Toolbox es una caja de herramientas, con funciones y bloques
de simulacin, que permite el clculo y anlisis de sistemas multifrecuencia y su
simulacin, de tal manera que se trabaja de la forma habitual como se hace con los
sistemas convencionales, requiriendo la especificacin slo del modelo continuo de la
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
104
planta (representacin externa o interna). Para el diseo se desarrollaron funciones
que de manera interactiva solicitan la informacin necesaria para el diseo y entregan
los parmetros finales del regulador, de acuerdo con los mtodos presentados en los
captulos anteriores.
Se busc en Internet y en la pgina Web de los desarrolladores de MATLAB
herramientas semejantes a la que se presenta aqu. Se encontraron algunas funciones
pero aplicadas al procesamiento digital de seales (DSP). En el rea del control no se
hall ninguna referencia al tema, adems de la idea general y el ejemplo expuestos
anteriormente.
La idea bsica de simulacin con el Multirate Control Toolbox (MCT) es la de
muestrear cada seal de entrada a perodo base, verificar si en ese instante se debe
tomar alguna muestra, formar el vector estirado (vectorizacin), calcular la salida
estirada, verificar si en ese instante debe aplicar alguna salida (reduccin). La
simulacin puede ser lenta si el perodo base es muy pequeo. El proceso es
transparente y claro. Las mscaras facilitan la parametrizacin de los bloques. Esta
idea es equivalente a la que se utilizara si se implementara un regulador
multifrecuencia en un ordenador, con la diferencia que en lugar de hacer un rastreo
cada perodo base, se definen tareas que respondan en determinados instantes de
muestreo.
El desarrollo del MCT fue publicado en eventos internacionales ([89],[90]),
destacndose el 8
th
IFAC Symposium on Computer Aided Control System Design
(UK, September 2000).
Un aspecto importante del Toolbox es su posibilidad de simular sistemas peridicos.
Por ejemplo, sistemas en los cuales un regulador cambia peridicamente entre
diferentes intervalos de muestreo. El ejemplo 5.4.11 muestra dicha aplicacin.
Los ejemplos desarrollados en este captulo, adems de ilustrar, son un complemento
importante a los aspectos tericos desarrollados a lo largo del trabajo. Sin el MCT
sera difcil estudiar el comportamiento del sistema con cada uno de los reguladores
diseados, hasta el punto de ver el comportamiento intermuestreo y el efecto directo
de cada uno de los parmetros. Las ventajas son evidentes: disee, pruebe y ajuste.
Esta etapa es tan sencilla que no parece que se est trabajando con un sistema
multifrecuencia (ver ejemplos ms abajo).
Los ejemplos muestran:
Aspectos de modelado tanto para el caso de muestreo regular como irregular.
Aspectos de modelado tanto para el caso de muestreo con sincronizacin de
entradas y salidas como sin sincronizacin.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
105
En estos dos casos se conjuga un mtodo de modelado bastante general con su
implementacin directa y sencilla.
Anlisis del rango de las matrices del modelo multifrecuencia e incidencia en el
comportamiento temporal de sistemas con muestreo irregular.
Desarrollo y anlisis de los diferentes mtodos de control multifrecuencia
obtenidos en el trabajo.
Discusin de los mtodos y de su campo de aplicacin.
El MCT propuesto en este trabajo es el resultado de ms de dos aos de revisin y
refinamiento de las funciones y los bloques, buscando siempre generalidad y
simplicidad en la manera de utilizarlos. Por supuesto, se seguir trabajando en nuevas
caractersticas y extensiones.
5.2. BLOQUES DE MATLAB/SIMULINK DEL MULTIRATE CONTROL
TOOLBOX
Los bloques de SIMULINK son la herramienta bsica para la simulacin de sistemas
multifrecuencia con la metodologa expuesta anteriormente en este trabajo. A pesar
de su sencillez encierran interiormente un trabajo representado en varias funciones,
como se menciona a continuacin.
Si st ema Si st ema
Mul t i f r ecuenci a
REGULAR
Si st ema Si st ema
Mul t i f r ecuenci a
I RREGULAR
Oper ador
de Kr anc
Di screti zador Di screti zador
Mul t i f r ecuenci a
REGULAR
Di cret i zador Di cret i zador
Mul t i f r ecuenci a
I RREGULAR
Fig. 5.1. Bloques de simulacin del MCT
Sistema multifrecuencia irregular
Es el bloque principal del Toolbox. Se basa en la funcin mrsim. Permite la
implementacin de un sistema multifrecuencia de manera directa. Se especifica: el
modelo multifrecuencia del regulador (o un sistema en general) en variables de estado
, , ,
R R R R
A B C D
% % % %
, el esquema de muestreo regular o irregular de las entradas
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
106
(variable Tinp), el esquema de muestreo regular o irregular de las salidas (variable
Tout) y el perodo global (variable To).
Sistema multifrecuencia regular
Tiene el mismo alcance del bloque anterior, pero permite ingresar el perodo de
muestreo regular de cada seal en lugar del esquema de muestreo. Se basa en el
anterior y su nica funcin es facilitar el ingreso de datos.
Discretizador multifrecuencia irregular
Este bloque se basa en el bloque Sistema multifrecuencia irregular. Se incluye para
facilitar la simulacin con un regulador que se obtiene por el mtodo de discretizacin
multifrecuencia de un regulador continuo (o rediscretizacin de un regulador discreto
monofrecuencia a perodo base). A diferencia del bloque Sistema multifrecuencia
irregular donde se introduce el modelo multifrecuencia directamente, aqu se
especifica el modelo continuo del regulador (incluyendo los retardos), adems del
esquema de muestreo irregular de las entradas, el esquema de muestreo irregular de
las salidas y el perodo global (variable T
o
).
Discretizador multifrecuencia regular
Es un caso particular del Discretizador multifrecuencia irregular para el caso de
muestreo regular de un regulador continuo o un regulador discreto a perodo base.
Simplifica la especificacin de los parmetros del sistema. Se indican los perodos de
muestreo de entradas y salidas en lugar de los esquemas de muestreo.
Operador de Kranc
Implementa el Operador de Kranc para sistemas SISO. El modelo continuo o discreto
(dependiendo del tipo de operador) se ingresa como una funcin de transferencia o
matrices de representacin interna. Se basa en el bloque Sistema multifrecuencia
irregular y se incluye por su relativa popularidad y como base para la comparacin
con otros mtodos.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
107
5.3. FUNCIONES DEL MULTIRATE CONTROL TOOLBOX
Las siguientes funciones son la base para la implementacin en SIMULINK y
MATLAB de los diferentes bloques (como S-Functions). Adems, se tienen funciones
para ser ejecutadas desde el MATLAB directamente en el ANEXO se encuentra el
cdigo y una descripcin ms detallada de estas funciones).
MULTIRATE. Esta funcin entrega el modelo multifrecuencia en variables de estado
de un sistema continuo aplicando la metodologa expuesta en este trabajo.
MRSIM. Funcin base para la simulacin de sistemas multifrecuencia (S-Function).
GCDVEC. Esta funcin entrega el mximo comn divisor de un vector de nmeros
reales.
LCMVEC. Esta funcin entrega el mnimo comn mltiplo de un vector de nmeros
reales.
SERIEX. Esta funcin calcula la serie matricial dada por
1
0
p
p
-
=
=
X A .
C2DDELAY. Esta funcin entrega el modelo discreto en variables de estado de un
sistema continuo con retardo en las entradas (vector de estado ampliado).
KRANC. Esta funcin corresponde a la implementacin de los tres tipos de
operadores de Kranc
MRCONTROL. Macro para el clculo interactivo de los mtodos de control
desarrollados en el trabajo. Con la macro se piden datos como: modelo de la planta,
esquema de muestreo de entradas y salidas, polos o modelo deseados, etc. La funcin
entrega informacin intermedia como la controlabilidad y observabilidad tanto del
sistema continuo como multifrecuencia y los vectores de ndices de controlabilidad y
observabilidad. Al final se da el regulador correspondiente y se abre un modelo de
SIMULINK.
MRLOCUS. Funcin para el clculo y trazado del lugar de las races de un sistema
multifrecuencia SISO con muestreo MRIC. Se pide el modelo continuo del sistema, el
perodo global y los esquemas de muestreo que se desean analizar. La funcin traza
los respectivos lugares de las races y las respuestas temporales para ganancias
unitarias. La funcin es til para el proceso de diseo.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
108
5.4. EJEMPLOS
Los siguientes ejemplos ilustran y complementan los diferentes aspectos tericos
trabajados a lo largo del texto. stos fueron desarrollados utilizando las funciones
descritas en los epgrafes 5.2 y 5.3. Se pretende mostrar una forma sistemtica de
aplicacin de la metodologa desarrollada a lo largo del trabajo y complementar
aspectos tericos a partir del anlisis de los ejemplos.
5.4.1. Modelado multifrecuencia
Esta serie de ejemplos ilustra la aplicacin del modelo obtenido en este trabajo y su
clculo por medio de Multirate Control Toolbox. Se aplica el modelo y funciones a un
sistema SISO y un sistema MIMO. Se pueden incluir retardos.
Sistema SISO. Muestreo sin offset en la entrada
Sea el siguiente sistema SISO:
( )
2
1 2 1
0
1 0
- - +
= +
x x u &
(5.1)
Se toma el siguiente esquema de muestreo irregular sin offset en la entrada:
Tinp = [0, 0.3, 1.2]
Tout = [0.2, 0.7, 1.3, 1.4]
To = 1.6
El modelo multifrecuencia del sistema anterior es, aplicando el modelo (3.21) del
trabajo, con sincronizacin de la entrada (el primer instante de muestreo es cero),
pero sin sincronizacin de la salida:
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
109
(1.6 )
0.12351 0.66435 0.0090616 2.27311 0.20293
(1.6( 1)) (1.6 )
(1.6 0.3) 0.6112 0.0012692 0.021311 0.05892 0.054274
(1.6 1.2)
(1.6 0.2)
(1.6 0.7)
(1.6 1.3)
u k
k k
u k
u k
y k
y k
y k
-
+ = +
+ - -
+
+
+
+
x x
0.50918 1.665 0.15318 0 0
0.41977 1.39 0.075047 0.20293 0
(1.6 )
0.090008 0.76285 0.070182 0.089003 0.089003
0.0015502 0.81144 0.04191 0.18593 0.15318
(1.6 1.4)
k
y k
-
- - -
= +
- - -
- - -
+
x
(1.6 )
(1.6 0.3)
(1.6 1.2)
u k
u k
u k
+
+
Como hay sincronizacin de las entradas a perodo T
o
, se puede eliminar la primera
columna de y B D
% %
(la funcin de MATLAB realiza esta eliminacin
automticamente y a partir de ahora no se mencionar este aspecto). El muestreo es
arbitrario. Obsrvese que el perodo global T
o
puede ser seleccionado tambin de
manera arbitraria.
La funcin multirate calcula el modelo multifrecuencia del sistema, elimina las
columnas de ceros (cuando no hay offset en las entradas), indica los parmetros del
modelo (perodo global e instantes de muestreo de las entradas y salidas en los
vectores estirados). El clculo del modelo con las funciones diseadas es bastante
sencillo: se especifica el modelo (continuo o a perodo base), el esquema de muestreo
de entradas y salidas y el perodo global.
Sal i das
x' = Ax+Bu
y = Cx+Du
Model o c ont i nuo
Si stema Si stema
Mul t i f r ecuenci a
I RREGULAR
Mo d e l o
mul t i f r ecuenci a
1
Ent r ada
Fig. 5.2 Diagrama de simulacin que compara las respuestas temporales de un sistema SISO continuo
y su modelo multifrecuencia
Los resultados muestran la excelente concordancia entre la salida de la planta
continua y el modelo multifrecuencia. Puede observarse tambin el comportamiento
irregular de la salida multifrecuencia, lo que valida (al igual que otros ejemplos) las
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
110
funciones y bloques de MATLAB/SIMULINK para la simulacin de sistemas
multifrecuencia con cualquier esquema de muestreo.
En la Fig. 5.3 se muestra el resultado de la simulacin (obsrvese el muestreo
irregular).
0 1 2 3 4 5 6 7 8 9 10
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Respuest a MF
Respuesta conti nua
Fig. 5.3 Muestreo multifrecuencia irregular de un sistema SISO y comparacin con la respuesta
continua (con sincronizacin de la entrada en T
o
)
Sistema SISO. Muestreo con offset en la entrada
Para el caso de muestreo irregular, pero sin sincronizacin de entradas y salidas (con
offset), se obtienen tambin excelentes resultados. Sea el siguiente esquema de
muestreo:
Tinp = [0.8, 1.0, 1.2]
Tout = [0.2, 0.7, 1.3, 1.4]
To = 1.6
Se aplica el modelo (3.21) sin sincronizacin de entradas y salidas (el primer instante
de muestreo es diferente de cero).
El resultado de la simulacin se muestra en la Fig. 5.4 (obsrvese el muestreo
irregular y el offset de la salida).
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
111
0 1 2 3 4 5 6 7 8 9 10
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Respuesta MF
Respuesta continua
Fig. 5.4 Muestreo multifrecuencia irregular de un sistema SISO y comparacin con la respuesta
continua (sin sincronizacin de la entrada en T
o
)
Se observa en la grfica anterior el offset de la salida y la excelente concordancia en
los diferentes instantes de muestreo.
Sistema MIMO. Muestreo con offset en las entradas
Sea el siguiente sistema MIMO:
2.5 0 0 2.5 0
4 1 0
0 2 0 10 1.2 ,
1/3 0 1
0 0 1 5 / 6 1
-
-
= - + - =
-
-
x x u y x
(5.2)
Se toma el siguiente esquema de muestreo irregular sin sincronizacin de entradas y
salidas:
Tinp = {[0, 0.3, 0.75], [0.2, 0.64]}
Tout = {[0.36, 0.49, 0.7, 0.93], [0, 0.5, 0.77]}
To = 1
Dentro de cada par de llaves se encuentra en corchetes el esquema de muestreo de
cada una de las entradas o salidas (el muestreo podra ser en serie).
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
112
Se calcula el respectivo modelo multifrecuencia a partir de (3.21) con el esquema de
muestreo especificado.
La siguiente figura muestra el diagrama de simulacin:
Sal i das
x' = Ax+Bu
y = Cx+Du
Model o c ont i nuo
Si st ema Si st ema
Mul t i f r ecuenci a
I RREGULAR
Mo d e l o
mul t i f r ecuenci a
[ 1 2]
Ent r adas
Fig. 5.5 Diagrama de simulacin que compara las respuestas temporales de un sistema MIMO continuo
y su modelo multifrecuencia
Resultado de la simulacin (obsrvese el muestreo irregular):
0 1 2 3 4 5 6 7 8 9 10
-0.5
0
0.5
1
1.5
2
2.5
Salida 1 continua
Salida 2 continua
Salida 2 MF
Salida 1 MF
Fig. 5.6 Muestreo multifrecuencia irregular de un sistema MIMO y comparacin con la respuesta
continua (sin sincronizacin de las entradas en T
o
)
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
113
Sistema con retardo
Se toma el sistema SISO (5.1), pero se adiciona ahora un retardo de 0.5 seg en la
entrada. Se obtiene un modelo con ms variables de estado, como es bien conocido de
la teora de control convencional [8].
El esquema de muestreo es:
Tinp = {[0.8, 1.0, 1.2]}
Tout = {[0.2, 0.7, 1.3, 1.4]}
To = 1.6
Se calcula el respectivo modelo multifrecuencia a partir de (3.21) con el esquema de
muestreo especificado.
Resultado de la simulacin (Obsrvese el muestreo irregular y el retardo):
0 1 2 3 4 5 6 7 8 9 10
-0.1
-0.05
0
0. 05
0. 1
0. 15
0. 2
0. 25
Sal i da MF
Sal i da cont i nua con ret ardo
Fig. 5.7. Muestreo multifrecuencia irregular de un sistema SISO con retardo y comparacin con la
respuesta continua (con offset de las entradas)
Este ejemplo muestra la posibilidad que tiene el modelo multifrecuencia propuesto
para el modelado de sistemas con retardo (adems de otras caractersticas estudiadas
anteriormente). Los clculos se hacen de una manera muy natural, pues es necesario
especificar un solo parmetro adicional: el tiempo de retardo.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
114
5.4.2. Rango de las matrices de sistemas multifrecuencia
En este ejemplo se analiza la incidencia del muestreo en el rango de las matrices de
un modelo multifrecuencia, de acuerdo a lo explicado en el epgrafe 3.4.3. El modelo
propuesto en el trabajo, en comparacin con otros mtodos, permite estudiar
fcilmente la influencia del muestreo irregular en dicho rango.
Se toma como ejemplo el siguiente sistema continuo MIMO de orden cuatro y dos
entradas y dos salidas:
2
0 1
2 ( 1) 0 0
0 3 4 1 0 0
1 0 0 0
,
1 0 0 0 2 6
0 0 2 0
2 0
0 0 0 3
- - +
= + =
x x u y x &
(5.3)
El sistema continuo es controlable y observable. El modelo discreto monofrecuencia
del sistema anterior no es controlable ni observable a perodo T = 1,2,3,... El
problema se presenta debido a que no se cumplen las condiciones de regularidad del
muestreo (Definicin 3.1, pgina 49). En efecto, los valores propios del modelo
anterior son 1 2 3 i
-
y aplicando la condicin de regularidad del muestreo se
tiene que la diferencia entre dos valores propios no debe satisfacer la siguiente
igualdad (los nicos valores que pueden traer algn problema son los dos primeros):
1 2
1 2
2
, 1, 2, 3,...
Donde
1 y 1
Por tanto,
2
2 o 1 2 3
q
i q
T
i i
q
i i T q , , ,...
T
- = =
= - + = - -
= = =
Se requiere que las matrices y B C
% %
sean de rango completo (igual a cuatro, orden
del sistema). Los vectores de ndices de controlabilidad y observabilidad son:
CIV = [2, 2]
OIV = [2, 2]
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
115
De esta manera, para garantizar que las matrices y B C
% %
sean de rango completo se
deben evitar que para cierto perodo, y
j i
T T
%
sean mltiplos de 1 y muestrear las dos
entradas y dos salidas con las siguientes multiplicidades:
1 2 1 2
2 2 N N N N = = = =
% %
Para el clculo de los vectores de ndices de controlabilidad y observabilidad se utiliz
la funcin CO, diseada especialmente para facilitar este tipo de clculos. A partir del
modelo es posible determinar: (i) controlabilidad y observabilidad con las respectivas
tolerancias; (ii) las matrices de controlabilidad y observabilidad; (iii) hasta 100
posibles combinaciones de vectores de ndices de controlabilidad y observabilidad.
Esta ltima informacin es muy valiosa en el anlisis y diseo de sistemas
multifrecuencia.
Los resultados del anlisis del rango de y B C
% %
con diferentes esquemas de muestreo
regular e irregular, se muestran en la siguiente tabla.
TABLA 5.1. INCIDENCIA DEL ESQUEMA DE MUESTREO IRREGULAR EN EL RANGO DE
LAS MATRICES y B C
% %
N Esquema de
muestreo
Condiciones
rank( ) B
%
rank( ) C
%
1 Regular
5 . 1 , 5 . 1 , 1
~
, 3
~
, 3
2 1 2 1
= = = = = T T T T T
o
2 (tol=10
-18
) 4 (tol=1.55)
2 Regular
1 2 1 2
3, 1, 1, 1.5, 1.5
o
T T T T T = = = = =
% % 3 (tol=10
-15
) 4 (tol=1.55)
3 Regular
1 2 1 2
3, 1.5, 1.5, 1, 1
o
T T T T T = = = = =
% % 4 (tol=0.22) 3 (tol=10
-15
)
4 Regular
1 2 1 2
6, 1, 2, 2, 3
o
T T T T T = = = = =
% % 3 (tol=10
-12
) 3 (tol=10
-15
)
5 Irregular
1 2 1 2
6, [0, 3.5], [0, 3.5], [0, 2.5], [0, 2.5]
o
T T T T T = = = = =
% %
4(tol=0.084) 4 (tol=1.05)
6 Irregular
1 2 1 2
6, [0, 4.5] , [0, 4.5], [0, 1.5], [0, 1.5]
o
T T T T T = = = = =
% % 4 (tol=0.21) 4 (tol=1.55)
7 Irregular
1 2 1 2
6, [0,5.5] , [0, 5.5], [0, 0.5], [0, 0.5]
o
T T T T T = = = = =
% % 4 (tol=0.73) 4 (tol=0.75)
La tolerancia se refiere al valor singular ms cercano a cero de la respectiva matriz.
El rango de una matriz es igual al nmero de valores singulares diferentes de cero
[73]. Un valor singular pequeo puede caer en el rango de aproximacin de un
programa y ser motivo de desconfianza.
Un anlisis de los resultados anteriores permite ver lo siguiente:
Las condiciones dadas en el epgrafe 3.4.3 del sistema multifrecuencia se
corroboran aqu completamente: seleccionando adecuadamente la secuencia de
muestreo en un perodo global, se puede garantizar el rango completo de las
matrices y B C
% %
del sistema multifrecuencia.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
116
Si al muestrear en un esquema multifrecuencia regular no se obtienen los rangos
deseados (no se cumple la condicin de regularidad), entonces se puede optar por
un esquema irregular sin necesidad de incrementar el nmero de muestras. Esta
posibilidad es til si se tienen limitaciones en el muestreo o no se desea aumentar
la carga computacional, como por ejemplo en sistemas distribuidos. Los casos 5 - 7
de la tabla anterior ilustran esta idea (para mejorar el rango se podra optar por
un perodo menor de 0.5, pero con un incremento en los clculos en un perodo de
6 segundos). En [83] se describen otras ventajas del muestreo irregular en relacin
a otras caractersticas como la controlabilidad, observabilidad, condicionamiento
de las matrices, reduccin del efecto de ruidos de medida y cuantificacin.
Los casos 5 - 7 muestran el efecto de los intervalos irregulares de muestreo en el
rango. En este caso, al parecer es recomendable seleccionar los intervalos
irregulares adecuados al final (principio) del perodo global para mejorar la
tolerancia del rango de B
%
(C
%
).
Las consideraciones anteriores pueden ser tiles en el diseo, como se muestra en
el ejemplo 5.4.10.
5.4.3. Discretizacin de reguladores continuos
Se aplica en este ejemplo el mtodo de discretizacin multifrecuencia general en lazo
abierto, explicado en el epgrafe 4.3. Se toma un regulador continuo y se discretiza
segn el modelo multifrecuencia obtenido y analizado en el trabajo.
Para el sistema MIMO (5.2) se dise el siguiente regulador continuo dado en [6]:
1 0 0 0 0
0 0 0 0 1
0 0 1 0 2.5
20/13 6/13 0 10/13 12 / 65
0 0 25/26 10/13 25 / 52
c
c
c
= +
-
= +
-
x x e
u x e
(5.4)
Sea el siguiente esquema de muestreo irregular con offset (sin sincronizacin) de la
segunda entrada:
Tinp = {[0, 0.1, 0.2], [0.05, 0.15, 0.25]}
Tout = {[0: 0.05: 2.5], [0: 0.05: 0.25]}
T
o
= 0.3
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
117
Al discretizar el regulador continuo anterior con el esquema propuesto y simular, se
obtiene la respuesta temporal que se muestra abajo.
De esta manera se presenta una forma muy clara pero inexacta de disear reguladores
multifrecuencia: diseo de un regulador continuo y su posterior discretizacin en un
esquema multifrecuencia. Este tipo de diseo no presenta ninguno de los problemas
tpicos del control multifrecuencia, como son: causalidad, rizado de la respuesta
temporal, complejidad del diseo.
La concordancia entre la respuesta continua y la discreta es bastante aceptable.
0 2 4 6 8 10
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Fig. 5.8 Comparacin de respuestas con un regulador MIMO continuo y su equivalente discreto
multifrecuencia
Una forma de mejorar la exactitud del diseo consiste en la discretizacin en lazo
cerrado, tal y como se explica en el epgrafe 4.3 y se muestra en el ejemplo 5.4.4.
En el caso de tener un regulador esttico continuo (o discreto a perodo base) el
respectivo regulador multifrecuencia contiene los mismos valores del regulador
continuo, pero con ceros adicionales. As, al regulador esttico diseado en continuo
1 2
3 4
=
F
le corresponde, con un esquema de muestreo
Tinp = {[0, 0.2],[0, 0.3]}
Tout = {[0, 0.1, 0.2, 0.4],[0]}
To = 0.5,
el siguiente regulador esttico multifrecuencia:
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
118
1 0 2 0
1 0 2 0
0 1 2 0
0 1 0 2
3 0 4 0
=
F
%
5.4.4. Mapeo del modelo
En este ejemplo se ilustra el mtodo de mapeo del modelo en un esquema de
muestreo FOLI irregular. Los aspectos tericos se explican con detalle en el epgrafe
4.3. El mtodo utiliza una realimentacin de la salida.
Modelo de la planta:
1
( )
(0.5 1)( 1)
p
G s
s s
=
- -
Modelo deseado:
2
16
( )
( 4)
d
G s
s
=
+
Para lograr el mapeo del modelo con un regulador multifrecuencia esttico se requiere
que:
1 1
1 1
2, 1
3, 3
0.16
[0.08, 0.12, 0.14] [0, 0.04, 0.08]
o
n m p
N n m N n m
T
T , T
= = =
= + = = + =
=
= =
%
%
El esquema FOLI requiere de la introduccin intencional del offset en la entrada (0.08
segundos).
El mtodo de mapeo del epgrafe 4.3 da el siguiente regulador (se calcul con la
macro mrcontrol):
118.42 350.5091 236.7438 7.13 0.28 1.74
1.4607 153.81 160.32 5.48 5.93 8.51
23.31 103.96 80.58 1.74 1.09 3.75
y r
,
- -
= - = -
- - -
K K
Los resultados de la simulacin se muestran en las siguientes figuras.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
119
Seal de
cont r ol
Sal i da
[ 1: 1: p]
Ref er enci a
x' = Ax+Bu
y = Cx+Du
Pl ant a cont i nua
x' = Ax+Bu
y = Cx+Du
Model o de r ef er enci a
Si st ema Si st ema
Mul t i f r ecuenci a
I RREGULAR
Ky
Si st ema Si st ema
Mul t i f r ecuenci a
I RREGULAR
Kr
Fig. 5.9. Diagrama de simulacin de un sistema de control multifrecuencia por mapeo del modelo con
realimentacin de la salida
0 1 2 3 4 5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Respuesta temporal
t (seg)
y
(
t
)
Respuesta de l a pl anta
Respuest a deseada
Fig. 5.10. Respuesta temporal de un sistema de
control multifrecuencia por mapeo del
modelo con realimentacin de la salida
0 1 2 3 4 5
-4
-2
0
2
4
6
8
10
Accin de control
t (seg)
u
(
t
)
Fig. 5.11. Accin de control en un sistema de
control multifrecuencia por mapeo del
modelo con realimentacin de la salida
De las grficas se observa el excelente comportamiento del sistema en lazo cerrado
con una planta inestable y un regulador por mapeo de modelo con realimentacin de
la salida. La diferencia entre las respuestas real y deseada se debe al offset del modelo
multifrecuencia irregular introducido.
5.4.5. Regulador de asignacin de polos en esquemas MRIC
En este epgrafe se ilustra con varios ejemplos y en detalle el mtodo de asignacin de
polos explicado en el epgrafe 4.4 para el caso de muestreo MRIC, con la idea de
compararlo con otros semejantes de otros autores. En el ejemplo siguiente se mostrar
la misma aplicacin pero en un esquema FOLI.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
120
Muestreo irregular de una planta SISO de fase mnima
El ejemplo se toma del trabajo de Eckardt [22], donde se presenta un mtodo de
asignacin de polos bajo otra perspectiva, aplicada a sistemas con muestreo regular.
Aqu se presenta la extensin a un muestreo irregular, tomando como base los
perodos de muestreo presentados all (el procedimiento es aplicable a plantas
inestables, pero aqu se aplica a la planta estable para comparar resultados).
Sea el siguiente modelo continuo de la planta SISO:
1
( )
(0.5 1)( 1)
p
G s
s s
=
+ +
(5.5)
El esquema de muestreo irregular multifrecuencia sin offset en la entrada, es:
[ ] [ ]
1 1
0, 0.1 0 , 1/6
o
T , T T = = =
%
El modelo multifrecuencia de la planta es:
0.5865 0.13 0.06961 0.06036
, , 0 1 , 0 0
0.2599 0.9764 0.01941 0.004163
-
= = = = =
A B C C D
% % % %
Para el clculo de
N p
F
%
se utiliza la funcin mevao para MATLAB dada en [53].
Aplicando (4.19) se obtiene el siguiente regulador esttico multifrecuencia, para una
ubicacin de polos en 4 0 5134 s , z . = - = :
37.2186
-44.7551
=
F
%
Diagrama de simulacin:
Sal i da del
si stema
Regul ador Regul ador
Mul t i f recuenci a
Irregul ar
1
Ref erenci a
1
0.5s +1.5s+1
2
Pl ant a
Mux
Acci n de
cont rol
Fig. 5.12 Diagrama de simulacin de un sistema SISO en un esquema irregular MRIC
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
121
Los resultados de la simulacin se muestran a continuacin. Se observan las
oscilaciones en la respuesta estacionaria del sistema. Este efecto indeseado se puede
eliminar introduciendo un integrador (ver ejemplo ms adelante, en esta serie de
casos).
0 0.5 1 1.5 2 2.5 3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Seal controlada
t (seg)
y
(
t
)
Fig. 5.13 Respuesta de un sistema SISO con un
regulador de asignacin de polos en un
esquema de muestreo MRIC irregular. Caso
de fase mnima
0 0.5 1 1.5 2 2.5 3
-50
-40
-30
-20
-10
0
10
20
30
40
Seal de control
t (seg)
u
(
t
)
Fig. 5.14. Accin de control en un sistema SISO
con un regulador de asignacin de polos y
un esquema de muestreo MRIC irregular.
Caso de fase mnima
Muestreo irregular de una planta SISO de fase no mnima
Ahora se realiza el mismo diseo, pero con una planta inestable y de fase no mnima.
Sea la siguiente planta:
3
( )
(0.5 1)( 1)
p
s
G s
s s
-
=
- -
(5.6)
El esquema de muestreo irregular multifrecuencia sin offset en la entrada, es:
[ ] [ ]
1 1
0, 0.1 0 , 1/6
o
T , T T = = =
%
El regulador multifrecuencia es (aplicando la funcin mevao), para una ubicacin de
polos en 4 0 5134 s , z . = - = :
-125.6459
199.2773
=
F
%
Los resultados se muestran en la siguiente grfica, comparados con el caso de la
planta de fase mnima.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
122
0 0.5 1 1.5 2 2.5 3 3.5 4
-30
-20
-10
0
10
20
30
Variable controlada
t (seg)
y
(
t
)
G(s)=(s-3)/[(0.5s-1)(s-1)]
G(s)=1/[(0.5s+1)(s+1)]
Fig. 5.15. Respuesta de un sistema SISO con un regulador de asignacin de polos en un esquema de
muestreo MRIC irregular. Caso de fase mnima
0 0.5 1 1.5 2 2.5 3 3.5 4
-200
-150
-100
-50
0
50
100
150
200
Accin de control
t (seg)
u
(
t
)
G(s)=(s-3)/[(0.5s-1)(s-1)]
G(s)=1/[(0.5s+1)(s+1)]
Fig. 5.16. Accin de control en un sistema SISO con un regulador de asignacin de polos con un
esquema de muestreo MRIC irregular. Caso de fase no mnima.
Como puede verse, el sistema presenta oscilaciones inadmisibles que llevan a la
conclusin de que este tipo de regulador no es apto para plantas de fase no mnima
[22]. La inclusin de un integrador empeora an ms la respuesta transitoria.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
123
Muestreo regular de una planta SISO de fase mnima
En este problema se tiene un esquema regular. En este caso es el mismo ejemplo
presentado por Eckardt [22].
El modelo de la planta se da en (5.5). El esquema de muestreo regular
multifrecuencia es:
1 1
1 1
1 12 1/6
1, 2, 2, 1/6, 1, 2, 2
o
T / , T
m p n N n T l N N
= =
= = = = = = = = =
%
% %
Modelo multifrecuencia de la planta:
0.5866 0.1299 0.05639 0.07356
0.2599 0.9764 0.01717 0.006392
0 1 0 0
-
= =
= = =
A B
C C D
% %
% %
Para el clculo de
N p
F
%
se utiliza la funcin mevao para MATLAB dadas en [53].
Aplicando (4.19) se obtiene el siguiente regulador esttico multifrecuencia, para una
ubicacin de polos en 4 0 5134 s , z . = - = :
44.4632
-35.5689
=
F
%
Diagrama de simulacin (se utiliza el bloque con muestreo regular):
Sc ope
Regul ador Regul ador
Mul t i f r ecuenci a
Regul ar
1
Ref er ence
1
0. 5s +1. 5s+1
2
Pl ant
Mu x
Fig. 5.17 Diagrama de simulacin de un sistema SISO en un esquema MRIC regular
Los resultados de la simulacin se muestran en las siguientes figuras.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
124
0 0.5 1 1.5 2 2.5 3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Seal control ada
t (seg)
y
(
t
)
Fig. 5.18 Respuesta de un sistema SISO con un
regulador de asignacin de polos con un
esquema de muestreo MRIC regular.
0 0.5 1 1.5 2 2.5 3
-40
-30
-20
-10
0
10
20
30
40
50
Acci n de control
t (seg)
y
(
t
)
Fig. 5.19. Accin de control en un sistema SISO
con un regulador de asignacin de polos con
un esquema de muestreo MRIC regular
Se observan, como en el ejemplo anterior, las oscilaciones en la respuesta estacionaria
del sistema. Este efecto indeseado se puede eliminar introduciendo un integrador,
como se ver ms adelante en esta serie de casos.
Muestreo regular de una planta MIMO
Sea la siguiente planta MIMO:
2.5 0 0 2.5 0
4 1 0
0 2 0 10 1.2 ,
1/3 0 1
0 0 1 5 / 6 1
-
-
= - + - =
-
-
x x u y x &
(5.7)
Se tiene que T
o
= 0.2, n = 3, p = m = 2.
Sea el siguiente esquema de muestreo:
1 1 2 2
2 y 1 N n N n = = = =
% %
% % .
Es decir,
1 2
0.1 y 0.2 T T = =
% %
.
En este caso el modelo multifrecuencia de la planta es,
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
125
0.6065 0 0 0.1723 0.2212 0
0 0.6703 0 0.7421 0.9063 0.1978
0 0 0.8137 0.0718 0.0793 0.1813
4 1 0
1/3 0 1
= = -
-
= =
-
A B
C D 0
% %
% %
El regulador es, para una ubicacin de los polos en s = -3, es decir, 0.5488
o
z = (se
utiliza la funcin mevao de [53]):
1.8311 4.8331
1.2359 3.8921
0.5112 1.2693
= - -
-
F
%
Resultados de la simulacin:
0 1 2 3 4 5
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
t (sec)
y
(
t
)
Fig. 5.20. Respuesta de un sistema MIMO con un regulador de asignacin de polos con un esquema de
muestreo MRIC.
Asignacin de polos por realimentacin del estado
Este caso particular de realimentacin de la salida (cuando C = I) se muestra en el
ejemplo 5.4.10, donde adems se tienen en cuenta otros aspectos del diseo.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
126
5.4.6. Asignacin de polos en un esquema de muestreo en serie de las
entradas
Sea la misma planta (5.7) con un perodo global T
o
= 0.2 y un muestreo en serie
(MRIC) de las entradas [ ] [ ] [ ] [ ]
1 2 1 2
0 , 0.1 , 0 , 0 T T T T = = = =
% %
.
Al utilizar un muestreo en serie aumenta el orden del modelo multifrecuencia de la
planta. En este caso, slo se tiene una entrada con offset (la segunda), por lo que el
orden se incrementa en uno. El orden entonces es igual a cuatro. Por el mtodo de
asignacin de polos por realimentacin de la salida en un esquema MRIC se puden
asignar un mximo de min(n, p + m + 1) polos, que en el problema actual equivale a
tres polos (la entrada y la salida no se estiran). Si se desean ubicar los cuatro polos
es necesario muestrear una de las dos variables de control al menos dos veces, como
en el siguiente caso: [ ] [ ] [ ] [ ]
1 2 1 2
0.4, 0, 0.2 , 0.1, 0.3 , 0 , 0
o
T T T T T = = = = =
% %
.
Los tres polos se ubican en 0.5488.
Utilizando la funcin mrcontrol del MCT (verifica que se cumplan las condiciones de
diseo) se obtiene el siguiente regulador esttico multifrecuencia:
0.02875 0.4408
0.01812 1.4
=
-
F
%
La respuesta temporal y las acciones de control se muestran en las siguientes figuras.
0 0. 1 0. 2 0. 3 0. 4 0. 5 0. 6 0. 7 0. 8 0. 9 1
0
0. 5
1
1. 5
2
2. 5
3
t (seg)
u
(
t)
Fig. 5.21. Acciones de control en un sistema con
muestreo en serie
0 0. 5 1 1. 5 2 2. 5 3 3. 5 4
-1
-0. 5
0
0. 5
1
1. 5
2
t (seg)
Fig. 5.22. Variables controladas en un sistema con
muestreo en serie
Como puede verse el diseo de un regulador de asignacin de polos de un sistema con
muestreo en serie es directo y sencillo a partir del mtodo de modelado y el mtodo
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
127
de control multifrecuencia desarrolados en el trabajo. Este caso ilustra una de las
ventajas de poder modelar el offset.
5.4.7. Eliminacin del rizado con adicin de un integrador
A continuacin se aplica el mtodo de eliminacin del rizado basado en la adicin de
un filtro integrador multifrecuencia. La idea se explica en el epgrafe 4.5 y se aplica
ahora a plantas SISO y MIMO, con muestreo regular e irregular. Se discuten los
efectos de esta metodologa.
Planta SISO con muestreo regular
Se toma el sistema del ejemplo (5.5), en el cual se mostr que el sistema en lazo
cerrado presenta problemas de rizado. El modelo continuo de la planta en mencin se
muestra a continuacin (se supone que hay restricciones en el muestreo que obliga a
laadopcin de un esquema multifrecuencia):
1
( )
(0.5 1)( 1)
p
G s
s s
=
+ +
El problema de rizado se puede resolver, para el caso de una planta SISO y un
muestreo MRIC regular, adicionando un integrador multifrecuencia. En este caso se
debe muestrear tres veces en el perodo global (el sistema planta - integrador es de
tercer orden y se aplica el Lema 3.3):
1 1
1 1
0.055 0.165, 0.165
1, 3
3, 1, 2, 3
o
T , T T
m p n
N n l N N
= = =
= = =
= = = = =
%
% %
El modelo del integrador multifrecuencia es (u es la entrada del integrador y salida
del regulador esttico):
( )
(( 1) ) ( ) 0.055 0.055 0.055 ( 0.055)
( 0.11)
( ) ( 1 0 0 0
( 0.055) 1 ( ) 0.055 0 0
0.055 0.055 0 1 ( 0.11)
o
o o o
R R
o
o
o o
R
o
u kT
k T kT u kT
u kT
u kT u kT
u kT kT
u kT
+ = + +
+
+ = +
+
x x
x
)
( 0.055)
( 0.11)
o
o
o
u kT
u kT
+
+
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
128
El modelo multifrecuencia del sistema planta - integrador es:
0.5899 0.1290 0.1290
(( 1) ) 0.2579 0.9769 0.02314 ( )
0 0 1
( ) 0.005132 0.002786 0
0.0005968 0.0001575 0 ( 0.055)
0.055 0.055 0.055 ( 0.11)
o o
o
o
o
k T kT
u kT
u kT
u kT
-
+ = +
+ +
+
x x
( ) 0 1 0 ( )
o o
y kT kT
=
x
A perodo global los polos de la planta estn en ( 0.8783 0.0962i ).
Para el clculo de
N p
F
%
se utiliza la funcin mevao para MATLAB dadas en [53].
Aplicando (4.19) se obtiene el siguiente regulador multifrecuencia, para una ubicacin
de polos en 4 0 5134 s , z . = - = :
3186
-5620
2481
=
F
%
Combinando la matriz anterior con el integrador multifrecuencia se obtiene el
siguiente regulador dinmico multifrecuencia:
(( 1) ) ( ) 2.638 ( )
( ) 1 0
( 0.055) 1 ( ) 175.2 ( )
1 133.8 ( 0.11)
o o o
R R
o
o o o
R
o
k T kT e kT
u kT
u kT kT e kT
u kT
+ = +
+ = +
- +
x x
x
El diagrama de simulacin es semejante al dado en la Fig. 5.12.
Los resultados de la simulacin se muestran a continuacin.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
129
0 0.5 1 1.5 2 2.5 3 3.5 4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
t (seg)
y
(
t
)
Referencia
Respuesta
Fig. 5.23 Respuesta de un sistema SISO con un
regulador de asignacin de polos con adicin
de un integrador, en un esquema de
muestreo MRIC
0 0.5 1 1.5 2 2.5 3 3.5 4
-150
-100
-50
0
50
100
150
200
Acci n de control
t (seg)
u
(
t
)
Fig. 5.24. Accin de control de un sistema SISO
con un regulador de asignacin de polos con
adicin de un integrador, en un esquema de
muestreo MRIC
El regulador con un integrador elimina completamente el rizado de la respuesta
estacionaria. Sin embargo, la respuesta transitoria puede incluso empeorar. En
general, el mtodo del integrador no es una solucin efectiva al problema del rizado.
Otros mtodos posibles para la eliminacin del rizado se presentan en el epgrafe 4.5.
El mtodo presentado aqu es sencillo y sigue la misma metodologa de los sistemas
monofrecuencia.
Si se ubican los polos ms cerca de los polos de la planta (por ejemplo en 0.8) se
obtienen menores oscilaciones y menores acciones de control (menor esfuerzo de
control), obviamente.
5.4.8. Regulador de asignacin de polos en esquemas FOLI
Planta inestable y de fase no mnima
En este ejemplo se toma directamente el sistema inestable de fase no mnima dado en
la ecuacin (5.6) y estudiado para el caso de un esquema MRIC en el ejemplo 5.4.5.
All el regulador de asignacin de polos por realimentacin de la salida daba un
comportamiento intermuestreo inaceptable. La respectiva planta es:
3
( )
(0.5 1)( 1)
p
s
G s
s s
-
=
- -
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
130
Ahora se introduce el siguiente esquema FOLI:
To = 0.16
Tinp = [0.06, 0.1, 0.13] , Tout = [0, 0.03, 0.06]
Polos = [0.5134, 0.5134, 0]
Aplicando la funcin mrcontrol se obtiene el siguiente regulador:
54826 10959 54815
73420 146780 73439
99.431 190.13 90.873
-
= -
F
%
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
-4
-3
-2
-1
0
1
2
t (seg)
Referencia
Salida
Fig. 5.25. Respuesta temporal en un esquema
FOLI y con un regulador de asignacin de
polos por realimentacin de la salida
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-60
-40
-20
0
20
40
60
80
100
t (seg)
Acci n de control
u
(
t
)
Fig. 5.26. Accin de control de un regulador de
asignacin de polos por realimentacin de la
salida en un esquema FOLI
0 0. 5 1 1. 5 2 2. 5 3 3. 5 4 4. 5 5
- 30
- 20
- 10
0
10
20
30
t ( seg)
Compar aci n de r espuest as t empor al es
y
(t)
MRI C
Ref er enci a
FOLI
Fig. 5.27. Comparacin de las respuestas temporales de un sistema de fase no mnima con un
regulador de asignacin de la salida y esquemas FOLI y MRIC
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
131
La respuesta temporal del sistema en lazo cerrado y la accin de control del regulador
multifrecuencia se muestran en la Fig. 5.25 y Fig. 5.26 respectivamente. La
comparacin entre las salidas temporales con un esquema FOLI y un esquema MRIC
se da en la Fig. 5.27. Es clara la ventaja del nuevo mtodo, aunque contina el
problema de rizado (un tema por tratar).
Planta estable y de fase mnima
Siguiendo con el caso de muestreo FOLI, se aplica ahora el mtodo a la planta (5.5):
1
( )
(0.5 1)( 1)
p
G s
s s
=
+ +
Se selecciona el siguiente esquema de muestreo:
To = 0.16
Tinp = {[0.06, 0.1, 0.13]} , Tout = {[0, 0.03, 0.06]}
Polos = [0.5134, 0.5134, 0]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
t (seg)
y
(
t
)
MRIC
FOLI
Fig. 5.28. Comparacin de las respuestas temporales de un sistema de fase mnima con un regulador de
asignacin de la salida y esquemas FOLI y MRIC
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
132
La respuesta temporal y la accin de control se muestran en la Fig. 5.28 y Fig. 5.29,
donde adicionalmente se comparan con las respectivas figuras para el muestreo
MRIC. Se observa que la accin de control empeora. El comportamiento es ms
aceptable para el caso del sistema de fase no mnima. De esta manera, a pesar de la
manipulacin matemtica que se logra con el muestreo FOLI, es necesario estudiar
con ms detalle aspectos relacionados con el rizado y la reduccin de la magnitud de
las acciones de control.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-250
-200
-150
-100
-50
0
50
100
150
200
Acci ones de control
t (seg)
u
(
t
)
MRIC
FOLI
Fig. 5.29. Comparacin de las acciones de control en un sistema con una planta de fase mnima, un
regulador de asignacin de la salida y esquemas FOLI y MRIC
5.4.9. Incidencia del muestreo irregular en el rizado
El siguiente ejemplo muestra un caso particular en el que el muestreo irregular
empeora el problema de rizado en esquemas MRIC, de acuerdo a las ideas de
Tangirala. Como lo explica Tangirala [75], el rizado es una consecuencia de la
diferencia de ganancias en estado estacionario en la matriz de funciones de
transferencia del proceso.
De esta manera, se analizar el modelo multifrecuencia de una planta y un regulador
de asignacin de polos por realimentacin de la salida si se aplica un esquema MRIC
en el cual se aplican dos acciones de control durante un perodo global; la primera
accin se aplica en el instante cero y la otra accin en cierto instante T
12
que se vara
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
133
en cierto rango. Para cada valor de T
12
se tendr un modelo multifrecuencia distinto
de la planta y, por tanto, un regulador diferente.
Se desarroll una macro de MATLAB que calcula para el segundo instante de
muestreo T
12
irregular, la relacin entre las ganancias R en estado estacionario de la
matriz de funciones de transferencia del modelo MRIC y el esfuerzo de control de
un regulador de asignacin de polos por realimentacin de la salida, calculado a partir
del modelo multifrecuencia de la planta. El esfuerzo de control se calcula como
2 2
1 2
K K = + .
Se toma una planta de segundo orden.
2
1
( ) 0.16
0.5 1.5 1
o
G s T
s s
= =
+ +
En la TABLA 5.2 se muestran los resultados obtenidos.
Como puede verse, el valor ptimo de muestreo corresponde al muestreo regular. Es
decir, para eliminar el rizado el muestreo irregular al parecer no aporta ninguna
solucin.
Al calcular el regulador multifrecuencia con diferentes esquemas de muestreo irregular
y simular, no se observan diferencias significativas.
TABLA 5.2. COMPARACIN DE REGULADORES MULTIFRECUENCIA CON MUESTREO
IRREGULAR
12
T
% R
0.01 0.0664 403.1169
0.02 0.1424 203.2330
0.03 0.2301 137.3195
0.04 0.3326 105.1449
0.05 0.4537 86.7533
0.06 0.5992 75.6041
0.07 0.7772 69.0379
0.08 0.9997 65.9186
0.09 1.2861 65.8939
0.10 1.6680 69.1937
0.11 2.2030 76.7505
0.12 3.0058 90.8022
0.13 4.3442 116.8902
0.14 7.0216 171.9827
0.15 15.0551 341.4520
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
134
5.4.10. Diseo con consideraciones de rango
En el siguiente ejemplo se muestra las posibilidades que ofrece el muestreo irregular
en el diseo de sistemas de control multifrecuencia.
Se tiene la siguiente planta SISO:
2
1 2 ( 1)
0
1 0
u
- - +
= +
x x &
(5.8)
A perodo T = 2 el modelo discreto monofrecuencia de esta planta no es controlable
(de acuerdo a la Definicin 3.1, pgina 49), por lo que no puede disearse un
regulador de realimentacin del estado. Una opcin es la de muestrear a un perodo
que no sea mltiplo de 1 (2.5, por ejemplo). Si se supone que hay restricciones en la
medida de la variable de salida, se puede recurrir al muestreo multifrecuencia para
tratar de controlar el sistema por medio de un muestreo ms frecuente de la variable
de control (normalmente sin limitaciones). Esto se discute con mayor profundidad en
el epgrafe 3.4.3 y el ejemplo 5.4.2.
Si stema Si stema
Mul t i f recuenci a
I RREGULAR
Sal i da
x' = Ax+Bu
y = Cx+Du
Pl ant a cont i nua
1
Constant
Acci n
de cont rol
Fig. 5.30. Diagrama de simulacin de un sistema
de control multifrecuencia por
realimentacin del estado
Fig. 5.31. Caja de dilogo en un bloque tpico del
Multirate Control Toolbox
Si se aplica un esquema de muestreo MRIC (bifrecuencia) regular con dos muestras
de la accin de control (cada Tinp = 1 con To = 2), el sistema sigue siendo no
controlable (se utiliza la funcin co del MCT).
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
135
Ahora, si se aplica el mismo esquema, pero con un muestreo irregular Tinp = [0, 1.5]
el sistema multifrecuencia s es controlable con una tolerancia aceptable de 0.03125.
Basado en el modelo y esquema anteriores, se disea ahora un regulador MRIC de
asignacin de polos por realimentacin del estado con un esquema de muestreo
irregular, utilizando el mtodo convencional (funcin place de MATLAB) pero
aplicado al modelo multifrecuencia. Se utiliza la funcin mrcontrol del MCT.
En las siguientes figuras se presentan los resultados para diferentes ubicaciones de los
polos (se toman en la planta condiciones iniciales diferentes de cero). Se observa bien
el muestreo irregular de la accin de control. Al utilizar la funcin place no se
presenta el problema de rizado, al contrario de si se usa la funcin mevao (ltima
figura).
0 0. 5 1 1. 5 2 2. 5 3 3. 5 4 4. 5 5
-1.5
-1
-0.5
0
0. 5
1
1. 5
2
2. 5
3
x1
x2
0 0. 5 1 1. 5 2 2. 5 3 3. 5 4 4. 5 5
-2.5
-2
-1.5
-1
-0.5
0
0. 5
Acci n de cont rol
Fig. 5.32. Respuesta en lazo cerrado de un sistema multifrecuencia con realimentacin del estado.
Polos deseados en [0, 0]. Kx = [-0.6542, 1.7013; 0.0468 1.7013]
0 5 10 15
-1
-0.5
0
0. 5
1
1. 5
2
x1
x2
0 5 10 15
-1
0
1
2
3
4
5
Acci n de cont rol
Fig. 5.33. Respuesta en lazo cerrado de un sistema multifrecuencia con realimentacin del estado.
Polos deseados en [-0.4, -0.4]. Kx = [1.2793 -3.3271; -0.0915 -3.3271]
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
136
0 5 10 15
-2
-1
0
1
2
3
4
5
x1
x2
0 5 10 15
-10
-5
0
5
Acci n de cont rol
Fig. 5.34. Respuesta en lazo cerrado de un sistema multifrecuencia con realimentacin del estado.
Polos deseados en [0.4, 0.4]. Kx = [-2.5877 6.7296; 0.1851 6.7296]
0 5 10 15 20 25 30
-1
-0.5
0
0. 5
1
1. 5
2
2. 5
x1
x2
0 5 10 15 20 25 30
-2
-1.5
-1
-0.5
0
0. 5
1
1. 5
2
Acci n de cont rol
Fig. 5.35. Respuesta en lazo cerrado de un sistema multifrecuencia con realimentacin del estado.
Polos deseados en [0.4, 0.4]. Kx = [-0.0420 -2.0057; -2.2974 -1.1212]. Uso de la funcin
MEVAO.
En las grficas se demuestra el excelente comportamiento del sistema en lazo cerrado
(a pesar de utilizar un regulador esttico MRIC, como se menciona en el epgrafe 4.5)
cuando se utiliza la funcin place (realimentacin del estado). Si se aplica la funcin
mevao (realimentacin de la salida, aqu aplica por ser C = I) las salidas (estados)
presentan rizado. Este ejemplo muestra la importancia de seleccionar correctamente
el mtodo de control para un sistema especfico.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
137
5.4.11. Simulacin de sistemas peridicos
El siguiente ejemplo es de inters en el control con muestreo no convencional y
muestra la manera directa como puede implementarse con el Multirate Control
Toolbox. Aunque el problema no tiene relacin directa con el tema de modelado y
diseo expuestos, s complementa el tema del muestreo no convencional y del alcance
del Toolbox desarrollado.
El problema se plantea y resuelve en [81]. La idea principal consiste en disear un
regulador para cada intervalo de muestreo de un sistema multifrecuencia. Es decir, un
regulador vara peridicamente dentro de un perodo global. A continuacin se
describe la planta, esquema de muestreo, reguladores obtenidos y simulacin con el
MCT.
La planta MIMO es la misma planta (5.7) y se escribe de nuevo a continuacin:
2.5 0 0 2.5 0
4 1 0
0 2 0 10 1.2 ,
1/3 0 1
0 0 1 5 / 6 1
-
-
= - + - =
-
-
x x u y x &
El esquema de muestreo se muestra en la Fig. 5.36 (la salida tiene un esquema
semejante).
Fig. 5.36. Sistema peridico
El control peridico en este caso se disea de manera que a partir de la generacin de
un modelo monofrecuencia a perodo base, se consideran las entradas y salidas slo en
los instantes correspondientes de muestreo. En este caso, aunque hay seis perodos
base en un perodo global, hay slo cuatro instantes de inters (0, 0.1, 0.15, 0.2) en
los cuales se adapta la seal de control. Se ve claramente la irregularidad del
muestreo. Se considera aqu por simplicidad que en esos instantes se puede obtener
directamente el estado de la planta (se puede ampliar el problema para el caso de uso
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
138
de observadores de estado, sin ningn problema). En los instantes de (0, 0.05, 0.1,
0.15, 0.2, 0.25) se calculan las respectivas matrices de realimentacin, las cuales en el
artculo en mencin [81] tienen la siguiente forma (se tienen dos acciones de control y
tres estados):
5 1
2 3
4
0.1343 0.6147 0.1130 0 0 0
0 0 0 0.0272 0.1029 0.4091
0 0 0 0.1325 0.6201 0.0875
0 0 0 0.0155 0.1570 0.3983
0.1328 0.6193 0.0914
0 0 0
o
= = =
-
= =
-
=
K K K
K K
K
La simulacin del sistema multifrecuencia con el MCT se hace de una manera muy
directa y original. Si se aplicara el modelo multifrecuencia propuesto en el trabajo al
sistema en mencin (tomando los entradas como salida de la planta), la matriz D
%
del
regulador sera una matriz de 5 12 . En efecto, en un perodo global la primera
accin de control se aplica tres veces (
1
3 N =
%
) y la segunda dos veces (
2
2 N =
%
) para
un total de cinco acciones de control ( 5) N = , mientras que cada variable de estado
se muestrea cuatro veces (
1 2 3
4 N N N = = = ). Ahora (esta es la clave), se
reemplazan en dicha matriz los reguladores anteriores para obtener el siguiente
regulador multifrecuencia peridico:
11 12 13
1
11 12 13
2 2 2 1
11 12 13
1 4 4 4
21 22 23
2
21 22 23
2
3 3 3
0 0 0 0 0 0 0 0 0
( )
0 0 0 0 0 0 0 0 0 ( 0.1)
( 0.2) 0 0 0 0 0 0 0 0 0
( )
0 0 0 0 0 0 0 0 0
( 0.15)
0 0 0 0 0 0 0 0 0
o o o
o
o
o
o
o o o
o
K K K
u kT
K K K u kT
u kT K K K
u kT
K K K
u kT
K K K
+
+
=
+
]
1 1 1 1 2 2 2
2 3 3 3 3
[ ( ) ( 0.1) ( 0.15) ( 0.2) ( ) ( 0.1) ( 0.15) ...
... ( 0.2) ( ) ( 0.1) ( 0.15) ( 0.2)
o o o o o o o
o o o o o
x kT x kT x kT x kT x kT x kT x kT
x kT x kT x kT x kT x kT
+ + + + +
+ + + +
El diagrama de simulacin y los resultados se muestran a continuacin, los cuales
coinciden con aquellos dados en el artculo referenciado anteriormente. Se toman
condiciones iniciales diferentes de cero.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
139
Si st ema Si st ema
Mul t i f r ecuenci a
I RREGULAR
Sal i da
x' = Ax+Bu
y = Cx+Du
Pl ant a cont i nua
K
Mat r i x
Gai n
Est ado
[ 0 0]
Const ant
Acci n
de cont r ol
Fig. 5.37. Diagrama de simulacin de un sistema peridico
0 0.5 1 1.5 2 2.5 3
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
t (seg)
x
i
(
t
)
x1
x2
x3
Fig. 5.38. Evolucin del estado de un sistema peridico
0 0.5 1 1.5 2 2.5 3
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
t (seg)
u
i
(
t
)
u1
u2
Fig. 5.39. Acciones de control de un sistema peridico
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
140
Los resultados obtenidos aqu coinciden con los del artculo si se tiene en cuenta que
estos ltimos consideran el caso del uso de estimadores peridicos de estado. De esta
manera, se mostr en un sencillo ejemplo el caso de los sistemas peridicos y una
nueva aplicacin del Multirate Control Toolbox.
5.5. CONCLUSIONES DEL CAPTULO
En este captulo se describi una serie de herramientas para MATLAB y SIMULINK,
agrupadas con el nombre de Multirate Control Toolbox (MCT), que implementan el
modelo obtenido en el trabajo y los diferentes mtodos de diseo discutidos,
permitiendo su clculo y simulacin de una manera sencilla e intuitiva.
La herramienta es una propuesta entre otras posibles, pero que presenta algunas
caractersticas que la hacen original y que estn ligadas estrechamente con el mtodo
de modelado propuesto:
Posibilidad de clculo y simulacin de sistemas con muestreo irregular arbitrario
de sistemas SISO y MIMO.
Posibilidad de offset de entradas y salidas.
Bloques de simulacin compactos que realizan internamente operaciones de
vectorizacin, reduccin y simplificacin, dejndole la tarea de ingresar la
informacin mnima necesaria.
Diagramas de simulacin semejantes a los correspondientes a sistemas
monofrecuencia, con todas las ventajas intuitivas que esto conlleva.
Posibilidad de anlisis directo del comportamiento intermuestreo de las diferentes
seales, ya que la simulacin se hace de manera hbrida y desde el punto de vista
de un observador externo. Es decir, las seales que corren por el sistema son
seales correctas y no son seales estiradas.
Extensin a la simulacin de sistemas peridicos en los cuales se tienen distintos
reguladores en diferentes intervalos de muestreo.
Adems de los ejemplos aqu propuestos, el MCT se prob y compar con
diferentes ejemplos encontrados en otros trabajos y, en especial, con problemas
con operadores de Kranc. Por esta razn se introdujo en el Toolbox este popular
operador.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
141
El MCT se ir mejorando para incluir o mejorar aspectos como: diseo (inclusin de
manera sistmica de mtodos diseados por otros autores), interfaces grficas de
usuario, manejo ms directo de sistemas peridicos, entre otros.
Finalmente, los diferentes ejemplos expuestos agrupan casos concretos de aplicacin
de los mtodos discutidos con anterioridad. Se hicieron diferentes pruebas y se
consignan los casos ms generales. Se podran incluir otros ejemplos, pero se opt por
poner los suficientemente necesarios.
CAPTULO 5. EJEMPLOS Y SIMULACIN
Modelado y simulacin de sistemas con muestreo no convencional
142
Modelado y simulacin de sistemas con muestreo no convencional
143
Captulo 6. Conclusiones y
recomendaciones
La escuela no debe ser una preparacin para la vida; la
escuela debe ser la vida misma (Elbert Hubbard)
A modo de conclusin es importante resaltar los aspectos ms importantes del trabajo
realizado, en relacin con los objetivos planteados originalmente y los resultados
finalmente obtenidos. Como es normal en esta clase de investigaciones, algunas cosas
se hacen de acuerdo a lo pensado, otras de una manera mucho mejor y otras dejan
muchos interrogantes abiertos. Estos ltimos se condensarn bajo el tema de
recomendaciones para investigaciones futuras, al final del captulo.
Los resultados ms relevantes del trabajo realizado se sintetizan a continuacin.
Se present de una manera resumida, pero bastante completa, el desarrollo
histrico del rea del control multifrecuencia en aspectos relacionados con el
modelado, anlisis, diseo y aplicacin. Varios aspectos e ideas complementarias
se discutieron dentro de las propuestas nuevas y los ejemplos, como es el caso del
problema de rizado, la restriccin de causalidad, los sistemas peridicos, la
representacin externa, algunos mtodos particulares de diseo (Eckardt,
Hagiwara, In, etc). Esta presentacin se facilita con la utilizacin del Multirate
Control Toolbox.
CAPTULO 6. CONCLUSIONES Y RECOMENDACIONES
Modelado y simulacin de sistemas con muestreo no convencional
144
A partir de bases de datos en Internet se hizo una pesquisa bibliogrfica que
permiti obtener la cita bibliogrfica de 380 artculos de revistas y eventos
internacionales de prestigio, desde 1955 hasta enero de 2001. De la mayora de
ellos se obtuvo un resumen y de 230 el texto completo. Esta base sirvi para hacer
una clasificacin y un breve anlisis de las reas y aplicaciones del control
multifrecuencia.
La caracterstica distintiva del modelo propuesto, en relacin a mtodos previos,
es la posibilidad de modelar sistmica y sistemticamente problemas de plantas y
reguladores con offset en las entradas (sobre todo) y en las salidas, con la posible
extensin al muestreo en serie y luego al muestreo FOLI. Aunque originalmente se
plante el problema de obtener a partir del mtodo de sustituciones progresivas
un mtodo de modelado de sistemas multifrecuencia que permita el caso de
muestreo irregular y plantas MIMO propias (D = 0), buscando una generalizacin
del mtodo de Araki - Yamamoto y caractersticas valiosas del modelo de Salt, al
final se encontraron mtodos equivalentes (Godbout et al, Albertos y el mismo
Salt). A partir de la revisin bibliogrfica se detect el caso de esquemas de
muestreo muy particulares, como el del muestreo en serie de entradas, que no
poda se abordado con los modelos anteriores.
Otras caractersticas del nuevo modelo son: su carcter bastante general de
aplicacin a diversos problemas, deduccin clara y precisa de casos particulares de
muestreo (MRIC, MROC, FOLI, en serie, etc.), consideracin de esquemas
irregulares y fcil adaptacin a cambios en dichos esquemas (por ejemplo, el
cambio del perodo global no requiere una redefinicin de otros perodos), fcil
implementacin en herramientas CACSD como MATLAB y SIMULINK,
representacin invariable en el tiempo, aplicacin a sistemas MIMO y SISO (caso
de reguladores propios), manipulacin clara de los parmetros del modelo.
El muestreo irregular mejora el rango de las matrices de los sistemas
multifrecuencia. Se analiz con detenimiento el problema del rango de las matrices
de sistemas multifrecuencia, haciendo nfasis en la incidencia del muestreo
irregular en estas caractersticas. Se mostr en un ejemplo que estas caractersticas
s se pueden mejorar con la adopcin de esquemas irregulares de muestreo. Incluso
se aplic dichas ideas a un problema de diseo concreto, donde el esquema regular
no aporta una solucin, bajo condiciones similares de diseo.
Se presentaron dos reguladores multifrecuencia (asignacin de polos y mapeo del
modelo) con la aplicacin de un esquema de muestreo FOLI. A pesar de la
similitud con otros mtodos de la literatura, los mtodos expuestos explotan el
grado de libertad dado por la irregularidad del muestreo y permiten su aplicacin
CAPTULO 6. CONCLUSIONES Y RECOMENDACIONES
Modelado y simulacin de sistemas con muestreo no convencional
145
en algunos casos especiales de control en sistemas distribuidos con un medio
comn de comunicacin.
El esquema FOLI es una de las posibilidades del mtodo de modelado propuesto.
Esta posibilidad se explota en el diseo, pues permite varias cosas: cumplir con la
restriccin de causalidad, simplificar los clculos ( 0 D =
~
en la planta y obtencin
de matrices cuadradas), dar mayor flexibilidad al muestreo (en el MRIC el
muestreo de las salidas era fijo, a perodo global), lograr diseos semejantes al de
realimentacin del estado pero con realimentacin de la salida (pseudo -
medicin), ilustrar y explotar claramente el grado de libertad adicional en el
control multifrecuencia.
Quedan abiertos algunos interrogantes, no obstante las ventajas y particularidades
del nuevo diseo: eliminar el rizado de los esquemas MRIC con mtodos ms
sistmicos, analizar con ms detalle la incidencia del cambio del muestreo
irregular, estudio de ms ejemplos y casos.
Se desarroll una herramienta CACSD para MATLAB y SIMULINK (Multirate
Control Toolbox) para el modelado, simulacin y diseo de sistemas
multifrecuencia, con base en los mtodos de modelado y diseo propuestos. La
metodologa de implementacin se discuti con cierto detalle y se compar con
ideas semejantes ya desarrolladas. A pesar de que no se hallaron herramientas
semejantes a la presentada, se considera sta como una posibilidad entre otras.
Todas las ideas y mtodos se introdujeron en la herramienta, la cual se us luego
para el estudio de aquellas. Al final se logr un producto compacto y
relativamente claro al usuario. El Toolbox se caracteriza principalmente por su
aplicacin de manera compacta con la informacin mnima necesaria (sistema,
esquemas de muestreo y perodo global), semejanza con los sistemas
monofrecuencia, simulacin hbrida analgica - digital (con la posibilidad de
observar las oscilaciones ocultas), diseo interactivo (la funcin de diseo pide
informacin inicial y entrega informacin intermedia necesaria, como la
controlabilidad y observabilidad y los respectivos vectores de ndices CIV y OIV),
construccin intuitiva y flexible de los diagramas de simulacin (se pueden disear
esquemas complejos de varios grados de libertad), aplicacin a esquemas generales
de muestreo, extensin directa a sistemas peridicos.
El MCT es susceptible de continuo mantenimiento y mejoramiento. Se deben
incluir aspectos como la inclusin de manera sistmica de mtodos diseados por
otros autores, la introduccin de interfaces grficas de usuario (que faciliten su
aplicacin y comprensin), el manejo ms directo de sistemas peridicos (sin
adaptaciones intermedias), entre otros.
CAPTULO 6. CONCLUSIONES Y RECOMENDACIONES
Modelado y simulacin de sistemas con muestreo no convencional
146
El trabajo desarrollado, como se deca, ha abierto varios interrogantes y posibilidades
que se recomiendan a continuacin como futuros trabajos de investigacin. Muchas de
estas ideas ya se estn investigando, pero no se espera a introducirlos por falta de
tiempo.
Diseo de reguladores dinmicos. A pesar del diseo sencillo de reguladores
estticos, stos presentan problemas de comportamiento intermuestreo. La
utilizacin de reguladores dinmicos (por ejemplo, estables) es posiblemente una
solucin al problema, pues permite igualar las ganancias en estado estacionario y
reducir o eliminar el cambio tan frecuente y excesivo de las acciones de control
entre los diferentes instantes de muestreo. Surge la inquietud si esquemas como el
FOLI pueden reducir los clculos para el diseo de los reguladores dinmicos.
Aunque se abri la puerta para el estudio de las incidencias del muestreo irregular
en el comportamiento y diseo, y se entr un poco en el tema, es importante
formalizar y generalizar ms los resultados.
Es importante integrar otros mtodos de control propuestos en la literatura al
esquema de muestreo propuesto (u otros de igual o mayor alcance). El modelo
contiene como casos particulares otros dados en la literatura, a partir de los cuales
se disean reguladores multifrecuencia. Se podrn muchos de estos unificar en
una sola metodologa?
Se podr utilizar la no causalidad de un regulador multifrecuencia para efectos
del diseo, en lugar de luchar con la restriccin de causalidad? Si se utiliza la
referencia en lugar de la medida futura, no se tendr las condiciones para un
regulador predictivo?
Eliminacin del rizado en esquemas MRIC con las diferentes tcnicas propuestas
en el epgrafe 4.5 y su integracin ms sinrgica con los diversos mtodos de
control multifrecuencia.
Aplicaciones reales de los mtodos propuestos, en especial en sistemas
distribuidos.
Estudio de otros mtodos de control, en especial el control robusto y el control
predictivo, que utilicen expresiones e ideas semejantes a la del control
multifrecuencia.
El rea del control multifrecuencia es apasionante y se puede concebir como una
teora general del control en tiempo discreto. Dicha rea no habra sido introducida
en Colombia (e incluso Latinoamrica) sin el aporte y presencia invalorables de la
CAPTULO 6. CONCLUSIONES Y RECOMENDACIONES
Modelado y simulacin de sistemas con muestreo no convencional
147
Universidad Politcnica de Valencia en Colombia, y sin el entusiasmo y dedicacin de
profesores del Departamento de Ingeniera de Sistemas y Automtica (ISA), como
Julin Salt L. Este trabajo es un ejemplo claro de intercambio cultural y cientfico,
sobre ideas de cooperacin internacional. En Colombia existen muchas personas que
valoran el esfuerzo e inters de la UPV y que han empezado a formar grupos de
investigacin y comunidades alrededor de su trabajo de tesis doctoral, algunos de los
cuales, como el de este trabajo que se culmina, es nuevo en nuestro medio.
Tres pasiones, simples pero abrumadoramente fuertes, han
gobernado mi vida: el anhelo de amor, la bsqueda del
conocimiento y una insoportable piedad por el sufrimiento de la
humanidad. (Bertrand Russell)
CAPTULO 6. CONCLUSIONES Y RECOMENDACIONES
Modelado y simulacin de sistemas con muestreo no convencional
148
Modelado y simulacin de sistemas con muestreo no convencional
149
ANEXO. Funciones del
Multirate Control Toolbox
function SM=multirate(S,Tj,Ti,To)
% SM=multirate(S,Tinp,Tout,To)
% OPERADOR MULTIFRECUENCIA - Sistemas con muestreo regular o irregular
% S Modelo del sistema MIMO continuo o discreto a perodo base T, con retardos (si se tienen)
% To Perodo global
% Tinp Esquema de muestreo de las entradas (en segundos). Tinp={...,[Tj1,...,TjNj],...}
% Tout Esquema de muestreo de las salidas (en segundos). Tout={...,[Ti1,...,TiNi],...}
% SM Modelo multifrecuencia (lineal invarable en el tiempo)
%
% NOTA: No olvidar las llaves y corchetes para el muestreo irregular!!!!!
% Si se desea tratar el caso de muestreo regular hacer Tinp=[...], Tout=[...] (sin llaves!!!)
% Se puede omitir To si ste es el m.c.m. de Tinp y Tout.
%
% SM contiene informacin acerca del modelo multifrecuencia en SM.Notes.
%
% Multirate Control Toolbox 4.5.MATLAB 5.3.
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
% Caso de muestreo regular
if tipo_obj(Tj)~=4 & tipo_obj(Ti)~=4
[A1,B1,C1,D1]=ssdata(S);
[p,m]=size(D1);
Ti1={};Tj1={};
if nargin < 4
To=lcmvec([Ti,Tj]);
end
for i=1:p
Tii=[0:Ti(i):To-Ti(i)];
Ti1{i}=Tii;
end
for j=1:m
Tjj=[0:Tj(j):To-Tj(j)];
Tj1{j}=Tjj;
end
Ti=Ti1; Tj=Tj1;
end
% Clculo del modelo discreto a perodo base T.
S=ss(S);
Tgcd=gcdvec([Tj{:} Ti{:} To]);
if S.Ts==0
T=Tgcd;
Sd=c2ddelay(S,T);
elseif (Tgcd/S.Ts)-round(Tgcd/S.Ts) > 0.001
disp(['ERROR: El modelo discreto de entrada est dado a Ts=' num2str(S.Ts) ' y no'])
disp(['a perodo base T=' num2str(Tgcd) ' (igual al mximo comn divisor) o un submltiplo: ' num2str(Tgcd/2) ', '
num2str(Tgcd/3) ',...'])
SM=[];
return
Modelado y simulacin de sistemas con muestreo no convencional
150
else
T=S.Ts;
Sd=S;
end
[A,B,C,D]=ssdata(Sd);
% Factores utilizados para el clculo del modelo multifrecuencia
% N Nmero de perodos T en To
% m Nmero de entradas
% p Nmero de salidas
% n Orden del sistema discreto a perodo T incluyendo el retardo
% Nj Vector con el nmero de muestras de cada entrada: Nj=[Nj1 Nj2 ... Njm]
% Ni Vector con el nmero de muestras de cada salida: Ni=[Ni1 Ni2 ... Nip]
% N__ Dimensin del vector expandido de entradas (nmero de entradas expandidas)
% N_ Dimensin del vector expandido de salidas (nmero de salidas expandidas)
% lj Arreglo, en el cual la fila j contiene un vector con el tamao (en perodos T) de cada intervalo de muestreo.
% lj={[lj{1}(1) lj{1}(2) ... lj{1}(Nj(1))]; [lj{2}(1) lj{2}(2) ... lj{2}(Nj(2))],...}
% li Arreglo, en el cual la fila i contiene un vector con el tamao (en perodos T) de cada intervalo de muestreo.
% li={[li{1}(1) li{1}(2) ... li{1}(Ni(1))]; [li{2}(1) li{2}(2) ... li{2}(Ni(2))],...}
N=round(To/T);
[p,m]=size(D);
n=length(A);
for j=1:m
Nj(j)=length(Tj{j});
end
for i=1:p
Ni(i)=length(Ti{i});
end
N__=sum(Nj);
N_=sum(Ni);
lj={};
for j=1:m
ljj=Tj{j}(1)/T;
for beta=2:Nj(j)
ljb=(Tj{j}(beta)-Tj{j}(beta-1))/T;
ljj=[ljj ljb];
end
ljj=[ljj (To-Tj{j}(Nj(j)))/T];
lj{j}=round(ljj);
end
li={};
for i=1:p
lii=Ti{i}(1)/T;
for alpha=2:Ni(i)
lia=(Ti{i}(alpha)-Ti{i}(alpha-1))/T;
lii=[lii lia];
end
lii=[lii (To-Ti{i}(Ni(i)))/T];
li{i}=round(lii);
end
% Clculo de las matrices necesarias para el modelo multifrecuencia
A1_=A^N;
A2_=[];
for j=1:m
A2_=[A2_ A^(N-lj{j}(1))*seriex(lj{j}(1),A)*B(:,j)];
end
B1_=[];
for j=1:m
Bj=[];
for niu=1:Nj(j)
I=eye(n);
bjn=A^(N-sum(lj{j}(1:niu+1)))*seriex(lj{j}(niu+1),A)*B(:,j);
Bj=[Bj bjn];
end
B1_=[B1_ Bj];
end
B2_=zeros(m,N__);
Modelado y simulacin de sistemas con muestreo no convencional
151
for j=1:m
B2_(j,sum(Nj(1:j)))=1;
end
C1_=[];
for i=1:p
CiD=[];
for miu=1:Ni(i)
CiD=[CiD;C(i,:)*A^sum(li{i}(1:miu))];
end
C1_=[C1_;CiD];
end
D_=[];
C2_=[];
for i=1:p
Di=[]; ci2D=[];
for j=1:m
Dij=[];
for miu=1:Ni(i)
dijm=[];
for niu=0:Nj(j) % niu=0 se utiliza para calcular C2_
psi=zeros(n);
for q=0:lj{j}(niu+1)-1
r=q+sum(li{i}(1:miu))-sum(lj{j}(1:niu+1));
if (r>=0)
psi=psi+A^r;
end
end
ind=sum(li{i}(1:miu))-sum(lj{j}(1:niu));
if(ind>=0)&(ind<lj{j}(niu+1))
sigma=D(i,j);
else
sigma=0;
end
dijmn=C(i,:)*psi*B(:,j)+sigma;
dijm=[dijm dijmn];
end
Dij=[Dij;dijm];
end
Dija=Dij(:,1);
Dijb=Dij(:,2:Nj(j)+1);
ci2D=[ci2D Dija];
Di=[Di Dijb];
end
C2_=[C2_;ci2D];
D_=[D_;Di];
end
% Formacin del modelo multifrecuencia
AA2=[];BB2=[];CC2=[];i=0;
for j=1:m
if sum(abs(A2_(:,j)))~=0
AA2=[AA2 A2_(:,j)];
BB2=[BB2;B2_(j,:)];
CC2=[CC2 C2_(:,j)];
i=i+1;
end
end
A_=[A1_ AA2; zeros(i,i+n)];
B_=[B1_;BB2];
C_=[C1_ CC2];
SM=ss(A_,B_,C_,D_);
%Edicin de la informacin del modelo multifrecuencia
SM.Ts=To;
SM.Notes=['To = ' num2str(To) ' T = ' num2str(T)];
L1={};
Modelado y simulacin de sistemas con muestreo no convencional
152
for i=1:p
L2={};
for miu=1:Ni(i)
L2={L2{:} ['y' num2str(i) '(kTo+' num2str(Ti{i}(miu)) ')']};
end
L1={L1{:} L2{:}};
end
SM.OutputName=L1;
L1={};
for j=1:m
L2={};
for niu=1:Nj(j)
L2={L2{:} ['u' num2str(j) '(kTo+' num2str(Tj{j}(niu)) ')']};
end
L1={L1{:} L2{:}};
end
SM.InputName=L1;
L1={};
for k=1:n
L1={L1{:} ['x' num2str(k)]};
end
for j=1:m
if sum(abs(A2_(:,j)))~=0
L2={['u' num2str(j) '((k-1)To+' num2str(Tj{j}(Nj(j))) ')']};
L1={L1{:} L2{:}};
end
end
SM.StateName=L1;
SM.UserData='Multirate';
function [sys,v0,str,ts]=mrsim(t,v,u,flag,A,B,C,D,Tj,Ti,To,xo)
% [sys,v0,str,ts]=mrsim(t,v,u,flag,A,B,C,D,Tj,Ti,To)
% MRSIM S-Function para la simulacin de un sistema multifrecuencia (regular o irregular)
% A,B,C,D Modelo multifrecuencia.
% flag Parmetro que controla la llamada a las subrutinas en cada etapa de la simulacin
% u Vector de entradas
% v Vector de estado
% t Variable temporal
% Tj Esquema de muestreo de las entradas (en segundos). Tj={...,[Tj1,...,TjNj],...}
% Ti Esquema de muestreo de las salidas (en segundos). Ti={...,[Ti1,...,TiNi],...}
% To Perodo global
% xo Estado inicial
% Parmetros de salida:
% sys Argumento de salida
% v0 Valores del estado inicial
% ADVERTENCIA: El sistema multifrecuencia debe ser causal
%
% Multirate Control Toolbox 4.5.MATLAB 5.3.
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
switch flag,
case 0
% Inicializacin
T=gcdvec([Tj{:} Ti{:} To]);
m=length(Tj);
p=length(Ti);
n=length(A);
for j=1:m
Modelado y simulacin de sistemas con muestreo no convencional
153
Nj(j)=length(Tj{j});
end
N__=sum(Nj);
sizes = simsizes;
sizes.NumContStates = 0; % Nmero de estados continuos
sizes.NumDiscStates = n+N__+p+1; % Nmero de estados discretos: [x' uD' y' k]'
sizes.NumOutputs = p; % Nmero de salidas
sizes.NumInputs = m; % Nmero de entradas
sizes.DirFeedthrough = 1; % Flag para indicar una alimentacin directa
sizes.NumSampleTimes = 1; % Nmero de perodos de muestreo
sys = simsizes(sizes);
if (nargin < 12) | isempty(xo)
v0 = [zeros(1,n+N__+p+1)]';
else
v0 = [xo zeros(1,N__+p+1)]';
end
ts = [T, 0];
case 2
% Actualizacin de los estados discretos v(k+1)
T=gcdvec([Tj{:} Ti{:} To]);
m=length(Tj);
p=length(Ti);
n=length(A);
for j=1:m
Nj(j)=length(Tj{j});
end
for i=1:p
Ni(i)=length(Ti{i});
end
N=round(To/T);
N__=sum(Nj);
x=v(1:n);
uD=v(n+1:n+N__);
y=v(n+N__+1:n+N__+p);
k=v(n+N__+p+1);
% Vector uD
for j=1:m
for niu=1:Nj(j)
if k==round(Tj{j}(niu)/T)
uD(sum(Nj(1:j-1))+niu)=u(j);
end
end
end
% Actualizacin del vector de salida y(KT)
% Es necesario retener y(t) para usarlo cuando el tiempo de muestreo en T no coincida con el de la salida
for i=1:p
for miu=1:Ni(i)
if (k==round(Ti{i}(miu)/T))
if n~=0
y(i)=C(sum(Ni(1:i-1))+miu,:)*x+D(sum(Ni(1:i-1))+miu,:)*uD;
else
y(i)=D(sum(Ni(1:i-1))+miu,:)*uD;
end
end
end
end
% Actualizacin del vector de estado y del tiempo de muestreo kT.
if k==N-1
if n~=0
x=A*x+B*uD;
end
Modelado y simulacin de sistemas con muestreo no convencional
154
k=0;
uD=zeros(N__,1);
else
k=k+1;
end
% Actualizacin del vector de estado v(k+1)
sys=[x' uD' y' k]';
case 3
% Clculo de las salidas
T=gcdvec([Tj{:} Ti{:} To]);
m=length(Tj);
p=length(Ti);
n=length(A);
for j=1:m
Nj(j)=length(Tj{j});
end
for i=1:p
Ni(i)=length(Ti{i});
end
N=round(To/T);
N__=sum(Nj);
x=v(1:n);
uD=v(n+1:n+N__);
y=v(n+N__+1:n+N__+p);
k=v(n+N__+p+1);
% Vector uD
for j=1:m
for niu=1:Nj(j)
if (k==round(Tj{j}(niu)/T))
uD(sum(Nj(1:j-1))+niu)=u(j);
end
end
end
% Actualizacin del vector de salida y(KT)
for i=1:p
for miu=1:Ni(i)
if (k==round(Ti{i}(miu)/T))
if n~=0
y(i)=C(sum(Ni(1:i-1))+miu,:)*x+D(sum(Ni(1:i-1))+miu,:)*uD;
else
y(i)=D(sum(Ni(1:i-1))+miu,:)*uD;
end
end
end
end
sys=y;
otherwise
sys = [];
end
function SDdelay=c2ddelay(Sc,T)
% Sd=c2ddelay(Sc,Ts)
% DESCRIPCIN EN VARIABLES DE ESTADO DE UN SISTEMA CON RETARDO
% Sc Sistema continuo con retardo (Sc.InputDelay)
% Ts Perodo de muestreo
% Entrega el modelo discreto en variables de estado de un sistema continuo con retardos en las entradas.
% Difiere de la funcin c2d del Control Toolbox del MATLAB en que la representacin se da en una sola matriz
% y no como un arreglo.
%
% Multirate Control Toolbox 4.5.MATLAB 5.3.
Modelado y simulacin de sistemas con muestreo no convencional
155
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
A=Sc.A; B=Sc.B; tao=Sc.InputDelay;
Sn=Sc; Sn.Inputdelay=0;
[n,m]=size(B);
I=eye(n);
Fi=expm(A*T);
for j=1:m
if tao(j)==0
l(j)=0;
elseif tao(j)<T
l(j)=1;
else
l(j)=fix(tao(j)/T)+1;
end
end
nAd=sum(l)+n;
Ad1=Fi; Ad2=[]; Bd1=[]; Bd2=[];
for j=1:m
if tao(j)==0
P=c2d(Sn,T);
Gammao=P.B(:,j);
Bd1=[Bd1 Gammao];
elseif tao(j)<T
P1=c2d(Sn,T-tao(j));
P2=c2d(Sn,tao(j));
Gammao=P1.B(:,j);
Gamma1=expm(A*(T-tao(j)))*P2.B(:,j);
Ad1=[Ad1 Gamma1];
Ad2=[Ad2; zeros(1,nAd)];
Bd1=[Bd1 Gammao];
Bd21=[zeros(1,j-1) 1 zeros(1,m-j)];
Bd2=[Bd2;Bd21];
else
taop=tao(j)-(l(j)-1)*T;
P1=c2d(Sn,T-taop);
if taop==0
Gamma1=zeros(n,1);
else
P2=c2d(Sn,taop);
Gamma1=expm(A*(T-taop))*P2.B(:,j);
end
Gammao=P1.B(:,j);
Ad1=[Ad1 Gamma1 Gammao zeros(n,l(j)-2)];
Ad31=[zeros(l(j)-1,1) eye(l(j)-1); zeros(1,l(j))];
Ad3=[zeros(l(j),n + sum(l(1:j-1))) Ad31 zeros(l(j),sum(l(j+1:m)))];
Ad2=[Ad2;Ad3];
Bd1=[Bd1 zeros(n,1)];
Bd21=zeros(l(j),m); Bd21(l(j),j)=1;
Bd2=[Bd2;Bd21];
end
end
Ad=[Ad1;Ad2];
Bd=[Bd1;Bd2];
[p,n]=size(Sc.C);Cd=[Sc.C zeros(p,sum(l))];
Dd=Sc.D;
SDdelay=ss(Ad,Bd,Cd,Dd,'Ts',T,'Notes','System with delay');
function [tipo,tolerancias,CIV,OIV,MatrizC,MatrizO]=co(S,tolmin)
% [tipo,tol,CIV,OIV,MatrizC,MatrizO]=co(S,tolmin)
% Esta funcin verifica que el sistema S sea controlable y observable con una
% tolerancia mnima de TOLMIN. Indica la tolerancia del resultado,
Modelado y simulacin de sistemas con muestreo no convencional
156
% de manera que se puede hacer un anlisis cualitativo del resultado.
% Por defecto, tolmin = 0.01
% tipo - texto que indica si el sistema es controlable y observable (con las respectivas tolerancias)
% tol - tolerancias
% MatrizC - matriz de controlabilidad en la forma [... Bj Bj*A Bj*A^2 ... Bj*A^(n-1)...]
% MatrizO - matriz de observabilidad en la forma [...; Ci; Ci*A; ...; Ci*A^(n-1);...]
% CIV - Matriz con los vectores de ndices de controlabilidad (un vector por fila). Mximo 100 filas.
% OIV - Matriz con los vectores de ndices de observabilidad (un vector por fila). Mximo 100 filas.
% NOTA: si el sistema no es controlable (observable) se entregan las combinaciones para el mximo rango.
%
% Multirate Control Toolbox 4.5.MATLAB 5.3.
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
S=ss(S);
[n,m]=size(S.B);
[p,n]=size(S.C);
Mc=[]; Mo=[];
for i=1:m
for j=1:n
Mc=[Mc S.A^(j-1)*S.B(:,i)];
end
end
for i=1:p
for j=1:n
Mo=[Mo; S.C(i,:)*S.A^(j-1)];
end
end
if nargin<2
tolmin=0.00001;
end
% Clculo de las tolerancias para la controlabilidad
[rc,tolc]=rank1(Mc);
if tolc<tolmin
tipoc=['El sistema NO es CONTROLABLE hasta una tolerancia de: ' num2str(tolmin)];
else
tipoc=['El sistema SI es CONTROLABLE con una tolerancia de: ' num2str(tolc)];
end
% Clculo de las tolerancias para la observabilidad
[ro,tolo]=rank1(Mo);
if tolo<tolmin
tipoo=['El sistema NO es OBSERVABLE hasta una tolerancia de: ' num2str(tolmin)];
else
tipoo=['El sistema SI es OBSERVABLE con una tolerancia de: ' num2str(tolo)];
end
tipo={tipoc;tipoo};
tolerancias=[tolc,tolo];
% Clculo de los vectores de ndices de controlabilidad
Rc=rank(Mc,tolmin);
maxValorC = Rc-m+1;
minVC=ones(1,m); minVC(1,m)=maxValorC;
maxVC=ones(1,m); maxVC(1,1)=maxValorC;
minNC=vec2num(minVC);
maxNC=vec2num(maxVC);
L=minNC;
PosCIV=minVC;
while L<maxNC & sizer(PosCIV)<101
L=L+9;
L1=num2vec(L);
if sum(L1)==Rc & min(L1)~=0
Modelado y simulacin de sistemas con muestreo no convencional
157
PosCIV=[PosCIV;L1];
end
end
[q1,q2]=size(PosCIV);
CIV=[];
for i=1:q1
Mc1=[];
for j=1:m
Mc1=[Mc1 Mc(:,n*(j-1)+1:n*(j-1)+PosCIV(i,j))];
end
if rank(Mc1,tolmin)==Rc
CIV=[CIV;PosCIV(i,:)];
end
end
% Clculo de los vectores de ndices de observabilidad
Ro=rank(Mo,tolmin);
maxValorO = Ro-p+1;
minVO=ones(1,p); minVO(1,p)=maxValorO;
maxVO=ones(1,p); maxVO(1,1)=maxValorO;
minNO=vec2num(minVO);
maxNO=vec2num(maxVO);
L=minNO;
PosOIV=minVO;
while L<maxNO & sizer(PosOIV)<101
L=L+9;
L1=num2vec(L);
if sum(L1)==Ro & min(L1)~=0
PosOIV=[PosOIV;L1];
end
end
[q1,q2]=size(PosOIV);
OIV=[];
for i=1:q1
Mo1=[];
for j=1:p
Mo1=[Mo1; Mo(n*(j-1)+1:n*(j-1)+PosOIV(i,j),:)];
end
if rank(Mo1,tolmin)==Ro
OIV=[OIV;PosOIV(i,:)];
end
end
function g = gcdvec(Q)
% g = gcdvec(Q)
% MXIMO COMN DIVISOR DEL VECTOR Q
%
% Multirate Control Toolbox 4.5.MATLAB 5.3.
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
n=length(Q);
Q=100000*Q;
Q=round(Q);
g=Q(1);
for i=2:n
g=gcd(g,Q(i));
end
g = g/100000;
function SM=kranc(G,Tinp,Tout,type_op)
% SM=kranc(G,Tinp,Tout,type_op)
Modelado y simulacin de sistemas con muestreo no convencional
158
% OPERADOR DE KRANC Operador de Kranc para el clculo del modelo multifrecuencia de sistemas SISO
% G Funcin de transferencia de la palnta
% Tinp Perodo de muestreo de la entrada
% Tout Perodo de muestreo de la salida
% type_op Tipo de operador
% 1. Kranc regular
% 2. ZOH Kranc
% 3. Kranc Digital
% SM - Representacin invariable en el tiempo del Operador de Kranc del sistema multifrecuencia
% SM contiene informacin acerca del modelo multifrecuencia en SM.Notes.
%
% Multirate Control Toolbox 4.5.MATLAB 5.3.
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
G=tf(G);
To=lcmvec([Tinp,Tout]);
T=gcdvec([Tinp,Tout]);
Nj=round(To/Tinp);
Ni=round(To/Tout);
k=round(To/T);
switch type_op,
case 1
[num,den]=tfdata(G);
num=[num{1} 0];
G=tf(num,den);
Gd=c2d(G,T,'zoh');
[numd,dend]=tfdata(Gd);
numd=deconv(numd{1},[1 -1]); numd=conv(numd,[1 0]);
Gd=tf(numd,dend);
Sd=ss(Gd);
[a,b,c,d]=ssdata(Sd);
A=a^k;
B=[];
for i=1:Nj
B=[B a^(k-(i-1)*k/Nj-1)*b];
end
C=[];
for i=1:Ni
C=[C;c*a^((i-1)*k/Ni)];
end
for i=1:Ni,
for j=1:Nj
l=(i-1)*k/Ni-(j-1)*k/Nj-1;
if (l-fix(l)==0) & (l>=0)
psi=a^l;
else
psi=a*0;
end
if (i-1)*k/Ni-(j-1)*k/Nj==0
sigma=d;
else
sigma=0;
end
D(i,j)=c*psi*b+sigma;
end
end
case 2
Gd=c2d(G,T,'zoh');
Sd=ss(Gd);
[a,b,c,d]=ssdata(Sd);
X=a*0;
for i=0:(k/Nj-1)
Modelado y simulacin de sistemas con muestreo no convencional
159
X=X+a^i;
end
A=a^k;
B=[];
for i=1:Nj
B=[B a^((Nj-i)*k/Nj)*X*b];
end
C=[];
for i=1:Ni
C=[C;c*a^((i-1)*k/Ni)];
end
for i=1:Ni,
for j=1:Nj
psi=0*a;
for q=0:k/Nj-1
l=q+(i-1)*k/Ni-(j-1)*k/Nj-k/Nj;
if (l-fix(l)==0) & (l >=0)
psi=psi+a^l;
end
end
ind=(i-1)*k/Ni-(j-1)*k/Nj;
if (ind >=0) & (ind < k/Nj)
sigma=d;
else
sigma=0;
end
D(i,j)=c*psi*b+sigma;
end
end
case 3
S=ss(G);
[a,b,c,d]=ssdata(S);
A=a^Nj;
B=[];
for i=1:Nj
B=[B a^(Nj-i)*b];
end
C=[];
for i=1:Ni
ind=(i-1)*Nj/Ni;
if ind-fix(ind)==0
C=[C;c*a^ind];
else
C=[C;0*c];
end
end
for i=1:Ni,
for j=1:Nj
l=(i-1)*Nj/Ni-j;
if (l-fix(l)==0) & (l>=0)
psi=a^l;
else
psi=a*0;
end
if (i-1)*Nj/Ni-j+1==0
sigma=d;
else
sigma=0;
end
D(i,j)=c*psi*b+sigma;
end
end
end
%Edicin de la informacin del modelo multifrecuencia
SM=ss(A,B,C,D);
SM.Ts=To;
Modelado y simulacin de sistemas con muestreo no convencional
160
SM.Notes=['To = ' num2str(To) ' T = ' num2str(T) ' Tinp = ' num2str(Tinp) ' Tout = ' num2str(Tout)];
L1={};
for miu=1:Ni
L1={L1{:} ['y' num2str(i) '(kTo+' num2str((miu-1)*Tout) ')']};
end
SM.OutputName=L1;
L1={};
for niu=1:Nj
L1={L1{:} ['u' num2str(j) '(kTo+' num2str((niu-1)*Tinp) ')']};
end
SM.InputName=L1;
function l = lcmvec(Q)
% l=lcmvec(Q)
% MNIMO COMN MLTIPLO DE UN VECTOR REAL Q
%
% Multirate Control Toolbox 4.5.MATLAB 5.3.
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
n=length(Q);
Q=Q*100000;
Q=round(Q);
l=Q(1);
for i=2:n
l=lcm(l,Q(i));
end
l = l/100000;
% mrcontrol
% Diseo y simulacin interactivos de reguladores multifrecuencia
% para una planta SISO o MIMO, con un esquema multifrecuencia FOLI o MRIC regular o irregular
%(el programa genera automticamente el esquema de muestreo para este ltimo caso)
%
% Multirate Control Toolbox 4.5. MATLAB 5.3.
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
clc
disp('Diseo y simulacin interactivos de un regulador multifrecuencia')
disp('para una planta SISO o MIMO, con un esquema multifrecuencia FOLI o MRIC regular o irregular ')
disp('(el programa genera automticamente el esquema de muestreo para este ltimo caso)')
disp(' ')
disp('Mtodos de control: 1. Realimentacin de la salida MRIC 2. Realimentacin de la salida FOLI')
disp(' 3. Realimentacin del estado MRIC 4. Mapeo del modelo')
metodo=input('Seleccin del mtodo: ');
disp(' ')
G=input('Modelo continuo de la planta (usar tf o ss): ');
S=ss(G);So=S;
[p,m]=size(S.D);
n=length(S.A);
To=input('Perodo de muestreo global: ');
l=1;
switch metodo
case 1
SEL=input('\nUsar integrador? (1. SI 0. NO): ');
if SEL==1
I=ss(zeros(m),eye(m),eye(m),zeros(m));
Modelado y simulacin de sistemas con muestreo no convencional
161
else
I=eye(m);
end
SI=S*I;
[Tipo_Sistema_continuo,tol,Posibles_CIV]=co(SI);
Tipo_Sistema_continuo
Posibles_CIV
disp('Basado en esta informacin, selecciones el esquema de muestreo de la(s) entrada(s) de la planta')
Tinp=input('Esquema de muestreo de la(s) entrada(s) de la planta {[..],[...],...}: ');
Tout={};
for i=1:p
Tout{i}=[0];
end
SM=multirate(S,Tinp,Tout,To);
IM=multirate(I,Tinp,Tinp,To);
SIM=SM*IM;
[pM,mM]=size(SIM.D); nM=length(SIM.A);
Tipo_Sistema_multifrecuencia=co(SIM)
disp('Incluye el integrador, si lo est usando')
while l==1
pmax=min(nM,mM+pM-1);
mensaje=['\nPolos deseados en lazo cerrado [p1,p2,...]. Mximo ' num2str(pmax) ' polos: '];
P=input(mensaje);
if length(P)<=pmax
l=0;
end
end
K=mevao(SIM.A,SIM.B,SIM.C,P)
SK=ss([],[],[],K,'Ts',To);
SF=IM*SK;
mrcontrol2
case 2
[Tipo_Sistema_continuo,tol,Posibles_CIV,Posibles_OIV]=co(S);
Tipo_Sistema_continuo
Posibles_CIV
Posibles_OIV
disp('Basado en esta informacin, selecciones el esquema de muestreo de la(s) entrada(s)')
disp('y de la(s) salida(s) de la planta. Recuerde que Nj >=nj+1 y Ni=ni+1')
Tinp=input('Esquema de muestreo de la(s) entrada(s) de la planta {[..],[...],...}: ');
Tout=input('Esquema de muestreo de la(s) salida(s) de la planta {[..],[...],...}: ');
SM=multirate(S,Tinp,Tout,To);
[pM,mM]=size(SM.D); nM=length(SM.A);
Tipo_Sistema_multifrecuencia=co(SM)
while l==1
mensaje=['\nPolos deseados en lazo cerrado [p1,p2,...pn]. Exactamente ' num2str(nM) ' polos: '];
P=input(mensaje);
if length(P)==nM
l=0;
end
end
K=place(SM.A,SM.B,P);
F=K*inv(SM.C)
SF=ss([],[],[],F,'Ts',To);
mrcontrol3
case 3
[Tipo_Sistema_continuo,tol,Posibles_CIV,Posibles_OIV]=co(S);
Tipo_Sistema_continuo
Posibles_CIV
disp('Basado en esta informacin, selecciones el esquema de muestreo de la(s) entrada(s) de la planta')
disp('Recuerde que Nj >=nj')
Tinp=input('Esquema de muestreo de la(s) entrada(s) de la planta {[..],[...],...}: ');
Tout={};
for i=1:n
Tout{i}=[0];
end
S.C=eye(n);
SM=multirate(S,Tinp,Tout,To);
Modelado y simulacin de sistemas con muestreo no convencional
162
[pM,mM]=size(SM.D); nM=length(SM.A);
Tipo_Sistema_multifrecuencia=co(SM)
while l==1
mensaje=['\nPolos deseados en lazo cerrado [p1,p2,...pn]. Exactamente ' num2str(nM) ' polos: '];
P=input(mensaje);
if length(P)==nM
l=0;
end
end
F=place(SM.A,SM.B,P)
SF=ss([],[],[],F,'Ts',To);
mrcontrol3
case 4
[Tipo_Sistema_continuo,tol,Posibles_CIV,Posibles_OIV]=co(S);
Tipo_Sistema_continuo
Posibles_CIV
Posibles_OIV
disp('Basado en esta informacin, selecciones el esquema de muestreo de la(s) entrada(s)')
disp('y de la(s) salida(s) de la planta. Recuerde que Nj=nj+1 y Ni=ni+1')
Tinp=input('Esquema de muestreo de la(s) entrada(s) de la planta {[..],[...],...}: ');
Tout=input('Esquema de muestreo de la(s) salida(s) de la planta {[..],[...],...}: ');
SM=multirate(S,Tinp,Tout,To);
[pM,mM]=size(SM.D); nM=length(SM.A);
Tipo_Sistema_multifrecuencia=co(SM)
disp(' ')
Gd=input('Modelo continuo deseado en lazo cerrado (usar tf o ss): ');
Sd=ss(Gd);
SMd=multirate(Gd,Tinp,Tout,To);
M=pinv(SM.C)*SMd.C;
SMd=ss2ss(SMd,M);
Ky=pinv(SM.B)*(SM.A-SMd.A)*pinv(SM.C)
Kr=pinv(SM.B)*SMd.B
SKy=ss([],[],[],Ky,'Ts',To);
SKr=ss([],[],[],Kr,'Ts',To);
mrcontrol4
otherwise
disp('Mtodo no definido')
return
end
disp('Ahora puede correr su simulacin')
function RK1=mrlocus(Gp,Gr,SecTinp,To,Tmax)
% RK1=mrlocus(Gp,Gr,SecTinp,To,Tmax)
% Funcin para el estudio del lugar de las races de sistemas bifrecuencia SISO con muestreo regular o irregular.
% En la grfica del lugar de las races los cuadros de diferente color muestran la ubicacin de las races con K=1.
%
% El modelo multifrecuencia se calcula a partir del modelo continuo o discreto a perodo base (m.c.d.)
% Gp Modelo continuo de la planta SISO.
% Gr Regulador continuo o discreto a perodo base.
% SecTinp Esquemas de muestreo multifrecuencia a analizar
% To Perodo global
% Tmax Tiempo mximo en la respuesta temporal
% RK1 Matriz con las races en K=1 para cada esquema de muestreo (en cada fila)
%
% Ejemplo (regulador PID):
% Gp=tf([1],[1 2 0.75]);
% Kp=6.27; Td=0.83; Ti=5.05; N=8; Gr=Kp*(1+tf([1],[Ti 0])+tf([Td 0],[Td/N 1]));
% Tout={[0],[0,0.1,0.2],[0,0.15],[0:0.05:0.25]}; To=0.3;
% mrlocus(Gp,Gr,Tout,To)
%
% Multirate Control Toolbox 4.5.MATLAB 5.3.
% Designed by Carlos Mario Vlez S.
% Universidad EAFIT - Universidad Politcnica de Valencia
% Medelln, Antioquia, Colombia
Modelado y simulacin de sistemas con muestreo no convencional
163
% E-mail: cmvelez@eafit.edu.co
% 10/03/2001
TextTo=num2str(To);
if nargin<5
Tmax=5;
end
figure(1)
clf
hold on
grid on
x=[-1:0.01:1];y=-sqrt(1-x.^2);plot(x,y,'y');
x=[-1:0.01:1];y=sqrt(1-x.^2);plot(x,y,'y')
figure(2)
clf
hold on
grid on
TextoCell={};
RK1=[];
for NSec=1:length(SecTinp)
SMp=multirate(Gp,{SecTinp{NSec}},{[0]},To);
T=gcdvec([SecTinp{NSec} To]);
SMr=multirate(Gr,{[0]},{SecTinp{NSec}},To);
Serie=series(SMr,SMp);
figure(1)
rlocus(Serie)
[R,K]=rlocus(Serie,1);
RK1=[RK1;R'];
x=real(R); y=imag(R); C=plot_caract(NSec,2);plot(x,y,C);
figure(2)
[S,G]=feedback1(SMr,SMp);S=d2c(S);
Texto=['[' num2str(SecTinp{NSec}) ']'];
TextoCell{NSec}=Texto; TextoCell{NSec+1}=['Esquema de muestreo'];
TextoCell{NSec+2}=['de la accin de control']; TextoCell{NSec+3}=['Bifrecuencia. To= ' TextTo];
[Y,T]=step(S,Tmax);C=plot_caract(NSec);plot(T,Y,C);
legend(TextoCell,0);
pause
end
figure(1)
title('Lugar de las races');
xlabel('Eje real'); ylabel('Eje imaginario');
hold off
plotedit
figure(2)
title('Respuesta temporal en lazo cerrado con K=1');
xlabel('t (seg)'); ylabel('y(t)');
hold off
plotedit
Modelado y simulacin de sistemas con muestreo no convencional
164
Bibliografa
[1] Albertos P., Block Multirate Input-Output Model for Sampled-Data Control
Systems, IEEE Transactions on Control, vol. 35, no. 9, pp. 1085-1088, 1990.
[2] Albertos P., Salt J., Receding horizon control of non-uniformly sampled data
systems, Proceedings of the 1999 American Control Conference, vol. 6, pp.
4300-4304, 1999.
[3] Amit N., Optimal Control of multirate digital control systems, Report
SUDAAR #523, Stanford University, Stanford, CA, 1980.
[4] Apostolakis I.S., Jordan D., A time invariant approach to multirate optimal
regulator design, International Journal of Control, vol. 53, pp. 1233-1254, 1991.
[5] Aracil R., Jimnez A., Feliu V., Multirate sampling technique in digital control
systems simulation, IEEE Transactions on Systems, Man and Cybernetics, vol.
14, no. 5, pp. 776-780, 1984.
[6] Araki M, Yamamoto K., Multivariable multirate sampled-data systems: state-
space description, transfer characteristics, and Nyquist criterion, IEEE
Transactions on Automatic Control, vol. 31, pp. 145-154, 1986.
[7] Araki M., Hagiwara T., Soma H., Application of multilevel sampled-data
controllers to simultaneous pole assigment problem, Proceedings 31th
Conference on Decision and Control, pp. 1762-1767, 1992.
[8] Araki, M., Recent development in digital control theory, Proceedings 12th
IFAC World Congr., vol. 9, pp. 951-960, 1993.
[9] Astrm K. J., Wittenmark B., Computer-Controlled Systems: Theory and
Design, Third Edition, Prentice-Hall, 1997.
[10] Azenha, A.; Tenreiro Machado, J.A., Dynamic analysis in variable structure
position/force hybrid control of manipulators, IEEE International Conference
on Systems, Man, and Cybernetics, vol. 5, pp 4309-4314, 1997.
Modelado y simulacin de sistemas con muestreo no convencional
165
[11] Barry P.E., Optimal control of multirate systems, Report RN-361, Research
Department, Grumman Aerospace Corporatin, 1975.
[12] Broussard J.R., Glasson D.P., Optimal multirate flight control design,
Proceedings of the 1980 Joint Automatic Control Conference, 1980.
[13] Camia C., Modelado y respuesta en frecuencia de los sistemas muestreados
multifrecuencia, Tesis Doctoral, Departamento de Ingeniera de Sistemas y
Automtica ISA, 1999.
[14] Chelouah A., Giamberardino P.D., Monaco S., Normand C.D., Digital control
of nonholonomic systems: two case studies, IEEE Conference on Decision and
Control, vol. 3, pp. 2664-2668, 1993.
[15] Chen C. T., Linear System Theory and Design, Holt Rinehart, Winston, pp.
561-563, 1984.
[16] Chen R., Guo G., Low T.S., An intersample ripple free multirate servo
controller for disk drive actuators, Proceedings 25th Annual Conference of the
IEEE Industrial Electronics Society, vol. 3, pp. 1171-1176, 1999.
[17] Choe Y.W., Araki M., Control of serial sampling systems, IEEE Transactions
on Automatic Control, vol. 37, pp. 1202-1205, 1992.
[18] Colaneri P., Kucera V, The Model matching problem for periodic discrete-time
systems, IEEE Transactions on Automatic Control, vol. 42, pp. 1472-1476,
1997.
[19] Dasgupta S., An approach to multirate control, Proceedings of the 38th IEEE
Conference on Decision and Control, vol. 4, pp. 3446 -3451, 1999.
[20] Desoer C.A., Liu R.W., Murria J., Saeks R., Feedback system design: The
fractional representation approach to anlisis and sntesis, IEEE Transactions
on Automatic Control, vol. 29, no.3, pp 399-412, 1984.
[21] Di Giamberardino P., Djemai M, Monaco S., Normand-Cyrot D., Exact
steering and stabilization of a PVTOL aircraft, Proceedings of the 36th IEEE
Conference on Decision and Control, vol. 3, pp. 2049-2054, 1997.
[22] Eckardt D., Design of finite response controllers by pole assigment in multirate
sampled-data systems, International Journal of Control, vol. 49, no. 4, pp.
1185-1193, 1989.
[23] Er M.J., Anderson B.D., Practical Issues in Multirate Output Controllers,
International Journal of Control, vol. 53, pp. 1005-1020, 1991.
Modelado y simulacin de sistemas con muestreo no convencional
166
[24] Fujimoto H., Kawamura A., Tomizuka M., Proposal of Generalized Digital
Redesign Method in use of N-Delay Control, Proceedings of American Control
Conference, pp. 3290-3294, 1997.
[25] Fujimoto H., et al, Proposal of seeking control of hard disk drives based on
perfect tracking control using multirate feedforward control, Proc.
International Workshop on Advanced Motion Control, pp. 74-79, 2000.
[26] Garrido A.J., De La Sen M., Barcena R., Approximate models to describe real
sampling and hold processes based on multirate sampling techniques,
Proceedings of American Control Conference, vol. 1, no. 6, pp. 195 -199, 2000.
[27] Glasson D. P., Development and Applications of Multirate Digital Control,
Control System Magazine, pp. 2-8, 1983.
[28] Godbout L.F., Jordan D., Apostolakis I.S., Closed-loop model for general
multirate digital control systems, IEE Proceedings, vol. 137, pp. 326-336, 1990.
[29] Godbout L.F., Jordan D., Striefler M. E., Pole placement algorithms for
Multirate-sampled linear systems, Automatica, vol. 30, pp. 723-727, 1994.
[30] Grasselli O.M., Jetto l., Longhi S., Ripple-free dead-beat tracking for multirate
sampled-data systems, International Journal of Control, vol. 61, no. 6, pp.
1437-1455, 1995.
[31] Hagiwara T., Araki M., Design of a stable feedback controller based on the
multirate sampling of the plant output, IEEE Transactions on Automatic
Control, vol. 33, pp. 812-819, 1988.
[32] Hagiwara T., Fujimura T., Araki M., Generalized multirate-output
controllers, International Journal of Control, vol. 52, no.3, pp. 597-612, 1990.
[33] Harley R.G., Westhuizen M.J., Levy D.C., Woodward D., Optimising
multirate motion control algorithms on parallel processors by static scheduling,
IEEE Industry Applications Society Annual Meeting, vol. 3, pp. 1872-1878,
1994.
[34] Havlena V., Barva P., Nonlinear MPC and inferential sensing for PVC
production, IEEE International Conference on Control Applications, vol. 2 ,
pp. 915-920, 1999.
[35] In H., Zhang C., A Multirate Digital Controller for Model Matching,
Automatica, vol. 30, no. 6, pp. 1043-1050, 1994.
Modelado y simulacin de sistemas con muestreo no convencional
167
[36] Ito H, Improvement of deadbeat servomechanism using multirate input
control, Proceedings of American Control Conference, vol. 1, no. 6, pp. 169 -
174, 2000.
[37] Jetto L., Longhi S., Simoultaneous ripple-free tracking problem for multirate
sampled-data systems, Proceedings of 30
th
Conference on Decision and
Control, pp. 2464-2469, 1991
[38] Jetto L., Longhi S., Parameterized solution of the dead-beat ripple-free control
problem for multirate sampled-data systems, Proceedings of the 38th IEEE
Conference on Decision and Control, vol. 4, pp. 3914-3919, 1999.
[39] Jordan D., Godbout L.F., Jun L.F., On the effect of sampling interval variance
on the response of a digital control system, Proceedings of the 10th World
IFAC Congress, pp. 950-960, 1987.
[40] Jury E.I., A note on multirate sampled-data systems, IEEE Transactions on
Automatic Control, vol. 12, pp. 319-320, 1967.
[41] Kalman R.E., Bertram J.E., A unified approach to the theory of samplig
systems, Journal of Franklin Institute, vol. 267, pp. 405-436, 1959.
[42] Khargonekar P.P., Poolla K., Tannenbaum A., Robust control of linear time-
invariant plants using periodic compensation, IEEE Transactions on
Automatic Control, vol. 30, pp. 21-28, 1957.
[43] King J., Gourishankar V.G., Rink R.E., Digital multirate control of flexible-
link manipulators, Proceedings of the IEEE International Conference on
Systems, Man, and Cybernetics, pp. 482-486, 1986.
[44] Knowles J.B., Edwards R., Finite word-length effects in multi-rate direct
digital control systems, Proceedings of IEE, vol. 112, pp. 2376-2384, 1965.
[45] Kranc G.M., Input-output analisys of multirate feedback systems, IRE
Transactions on Automatic Control, PGAC-3, vol 3, pp. 21-28, 1957.
[46] Kuo B.C., Peterson D.W., Optimal discretization of continuous-data control
systems, Automatica, vol. 9, pp. 125-129, 1973.
[47] Longhi S., Structural Properties of Multirate Sampled-Data Systems, IEEE
Transactions on Automatic Control, vol. 39, no.3, 1994.
[48] Masten M.K. (Editor), Modern Control Systems: Study Guide, IEEE.
Modelado y simulacin de sistemas con muestreo no convencional
168
[49] Meyer R.A., Burrus C.S., A unified analysis of multirate and periodically time-
invarying digital filters, IEEE Transactions on Circuits Systems, vol. 22, pp.
162-168, 1975.
[50] Meyer D., Toward a new CAD method for MIMO multirate digital
controllers, Proceedings of 27th Conference on Decision and Control, pp. 889-
1891, 1988.
[51] Meyer D.G., A parametrization of stabilizing controllers for multirate sampled-
data systems, IEEE Transactions on Automatic Control, vol. 35, no. 2, pp.
233-236, 1990.
[52] Meyer D.G., A new class of shift-varying operators, the shift-invariant
equivalents and multirate digital systems, IEEE Transactions on Automatic
Control, vol. 35, pp. 429-433, 1990.
[53] Miminis G.. MATLAB POLEPACK Toolbox, Universidad de Newfoundland,
Canad, ftp://ftp.mathworks.com/pub/contrib/v4/control/polepack.zip.
[54] Misra P., Patel R.V., Numerical Algorithms for Eigenvalue Assignment by
Constant and Dynamic Output Feedback, IEEE Transactions on Automatic
Control, vol. 34, pp. 579-588, 1989.
[55] Monaco S., Normand-Cyrot D., An introduction to motion planning under
multirate digital control, 31th Conference on Decision and Control, pp 1780-
1785, 1992.
[56] Moore K. L., S. P. Bhattacharyya, M. Dahleh, Capabilities and limitations of
multirate control schemes, Automatica, vol. 29, no.4, pp. 941-951, 1993.
[57] Ogata K., Sistemas de control en tiempo discreto, Prentice-Hall, Segunda
edicin, 1996.
[58] Palopoli L., Conticelli F., Allotta B., Multi-level stabilizing control of an
nonholonomic vehicle and its discrete-time multirate implementation,
Proceedings of IEEE International Conference on Robotics and Automation,
vol. 2 , pp. 1830-1835, 2000.
[59] Paraskevopoulos P.N., Arvanitis K.G., Frantzikinakis H.E., Digital control of
distillation columns using singlerate and multirate periodic controllers,
International Conference on Control, vol. 1, pp. 261-267, 1994.
Modelado y simulacin de sistemas con muestreo no convencional
169
[60] Patton R.J., Liu G.P., Patel Y., Sensivity properties of multirate feedback
control systems, based on eigenstructure assignment, IEEE Transactions on
Automatic Control, vol. 40, no. 2, pp. 337-342, 1995.
[61] Qiu L., et al, Development of MATLAB tools and case study for multirate
control design, Proceedings of the 35th IEEE on Decision and Control, vol. 2,
pp. 1278-1283, 1996.
[62] Qiu L., Chen T., Multirate sampled-data systems: All
H suboptimal
controllers and the minimum entropy controller, IEEE Transactions on
Automatic Control, vol. 44, no. 3, pp. 537-550, 1999.
[63] Radhakrishanan T.K., Gangiah K., Yamuna R.K., Multirate multivariable self-
tuning control of distillation columns using Kalman predictor, Chemical
Engineering Communications, vol. 127, pp. 55-74, 1994.
[64] Rafee N., Chen T.,Malik O.P., Multirate discretization of analog controllers,
Canadian Conference on Electrical and Computer Engineering, vol. 2, pp. 554-
557, 1996.
[65] Ravi R., Khargonekar P.P., Minto K.D., Nett C.N., Controller
Parametrization for Time-Varying Multirate Plants, IEEE Transactions on
Automatic Control, vol. 35, no. 11, pp. 1259-1262, 1990.
[66] Ritchey V.S., Franklin G.F., A stability criterion for asynchronous multirate
linear systems, IEEE Transactions on Automatic Control, vol. 34, no. 5, pp.
529-535, 1989.
[67] Salt J., Control de Procesos con Muestreo No-Convencional, Tesis Doctoral,
DISCA, Universidad Politcnica de Valencia, 1992.
[68] Salt J., Albertos P., Tornero J., Modeling of Non-Conventional Sampled Data
Systems, Proceedings of the 2nd IEEE Conference in Control Applications, pp.
631-635, 1993.
[69] Salt J., Albertos P., Tornero J., Digital Control Improvement by Multirate
Control, Proceedings of the 3rd IEEE Conference in Control Applications, vol.
2, pp. 1459-1464, 1994.
[70] Sang E.B., Seung H.L., Design of a multi-rate estimator and its application to
a disk drive servo system, Proceedings of American Control Conference, vol. 5,
pp. 3640-3644, 1999.
Modelado y simulacin de sistemas con muestreo no convencional
170
[71] Scattolini R., Schiavoni N., A multirate model-based predictive control, IEEE
Transactions on Automatic Control, vol. 40, no. 6, pp. 1093-1096, 1995.
[72] Sklansky J., Ragazzini J.R., Analysis of errors in sampled-data feedback
systems, AIEE Transactions, vol. 74, part II, pp. 65-71, 1955.
[73] Skogestad S., Postlethwaite I., Multivariable Feedback Control: Anlisis and
Design, Ed. John Wiley & Sons, 1997.
[74] Tanaka K., Kurigami M., Zhao G., Sakamoto M., Shimizu A., Multi-rate
MRAC using delta-operator for electro-pneumatic servo system, 35th IEEE on
Decision and Control, vol. 1, pp. 39-44, 1996.
[75] Tangirala A.K., Sirish L.S., Chen T., Conditions for Removing Intersample
Ripples in Multirate Control, IEEE Canadian Conference on Electrical and
Computer Engineering, vol. 3, pp. 1585-1589, 1999
[76] Tangirala A.K., Li D., Patwardhan R., Shah S.L., Chen T., Issues in multirate
process control, Proceedings of the 1999 American Control Conference, vol. 4,
pp. 2771-2775, 1999.
[77] Tham M.T., Vagi F., Morris A.J., Wood R.K., Multivariable and multirate
self-tuning control: A distillation column case study, IEE Proceedings. Part D,
vol. 138, no.1, pp. 9-24, 1991.
[78] Thompson P.M., Gain and phase margin of multirate sampled-data feedback
systems, International Journal of Control, vol. 44, pp. 833-846, 1986.
[79] Thompson P.M. (1988), Program CC Version 4: Reference Manual,
Hawthorne, Systems Technology, Inc. , Vol. II, pp. 566-585, 1988.
[80] Tornero J., Gu Y., Tomizuka M., Analysis of multi-rate discrete equivalent of
continuous controller, Proceedings of American Control Conference, vol. 4, pp.
2759-2763, 1999.
[81] Tornero J., Albertos P., Salt J., Periodic optimal control of multirate sampled
data systems, IFAC Workshop on Periodic Systems and Control, 2001.
[82] Torngren M., Wikander J., Decentralization methodology for real-time control
applications, Control Engineering Practice, vol. 4, no.2, pp. 219-228, 1996.
[83] Troch I., Sampling with arbitrary choice of the sampling instants,
Automatica, vol. 9, pp. 117-124, 1973.
Modelado y simulacin de sistemas con muestreo no convencional
171
[84] Truman A.W., An analysys of sub-rate control systems, International Journal
of Control, vol. 63, pp. 365-392, 1996.
[85] Truman A.W., Govan M., Polynomial LQG synthesis of subrate digital
feedback systems, IEE Proceedings on Control Theory and Applications, vol.
147, no. 3, pp. 247 - 256, 2000.
[86] Using MATLAB, Version 5, MathWorks Inc, 1997.
[87] Using SIMULINK: Dynamic System Simulation Software, Users Guide,
Mathworks Inc, 1997.
[88] Vlez C.M., Salt J., Mtodos, conceptos y perspectivas del diseo de
controladores multifrecuencia, VIII Congreso Latinoamericano de Control
Automtico, vol. 2, pp. 541-546, 1998.
[89] Vlez C.M., Salt J., Simulation of multirate control systems in
MATLAB/SIMULINK, Second World Manufacturing Congress, pp. 84-90,
1999.
[90] Vlez C. M., Salt J., Simulation of irregular multirate systems, 8th IFAC
Symposium on Computer Aided Control System Design, 2000. (Preprint).
[91] Vlez C.M., Salt J., Modelacin de sistemas multifrecuencia con muestreo
irregular, IX Congreso Latinoamericano de Control Automtico, pp. 13-19,
2000.
[92] Viassolo D.E., Practical design of multirate output controllers, Proceedings of
the 37th IEEE Conference on Decision and Control, pp 337-342, 1998.
[93] Werner H., Robust control of a laboratory flight simulator by nondynamic
multirate output feedback, Proceedings of the 35th IEEE on Decision and
Control, vol. 2, pp. 1575-1580, 1996.
[94] Whitbeck R.F., Didaleusky D.C.J., Multirate digital control systems in
simulation applications, Report AFWAL-TR-80-3101, vols I, II and III, Fligth
Dynamics Laboratory, Air Force Wright Aeronautical Laboratory, Wright
Patterson Air Force Base, Ohio, 1980.
[95] Yackel R.A., Kuo B.C., Singh G., Digital redesign of continuous systems by
matching of states at multiple sampling periods, Automatica, vol. 10, pp. 105-
111, 1974.
Modelado y simulacin de sistemas con muestreo no convencional
172
[96] Youla D.C. et al, Modern Wiener-Hopf design of optimal controllers Part II:
The multivariable case, IEEE Transactions on Automatic Control, vol. 21, no.
6, pp. 319-338, 1976.
[97] Yuping G., Tomizuka M., Tornero J. , Digital redesign of continuous time
controller by multirate sampling and high order holds, Proceedings of the 38th
IEEE Conference on Decision and Control, vol. 4, pp. 3422-3427, 1999.
[98] Yuping Gu, Tomizuka, M., Multirate digital redesign of continuous time
controllers based on closed-loop performance, Proceedings of American Control
Conference, pp. 1149-1153, 2000.
Modelado y simulacin de sistemas con muestreo no convencional
173
ndice
A
Albertos P., 16, 48, 51, 144, 164, 169, 170
Aplicaciones del control multifrecuencia, 9
Araki, 7, 15, 16, 23, 24, 25, 46, 51, 63, 64, 65, 68, 96, 97,
164, 165, 166
Mtodo de Araki - Yamamoto, 15, 24
Asignacin o ubicacin de polos, 4, 10, 28, 82, 91, 92,
93, 94, 95, 96, 119, 120, 121, 122, 124, 125, 129, 135
Condicin de asignacin, 95
B
BMIO, 16, 27, 52
C
CACSD, 19, 47
Condicin de regularidad del muestreo, 49
Controlabilidad y observabilidad de sistemas
multifrecuencia, 48
Caso de muestreo regular, 50
D
Descomposicin de interruptores, 14, 21, 102
Descomposicin frecuencial, 14, 15
Descomposicin vectorial de interruptores, 14
Diseo con dos grados de libertad, 76, 78, 83
Diseo con un grado de libertad, 76, 77, 78
E
Eckardt, 93, 94, 95, 120, 123, 165
Enfoque temporal, 14
Estabilidad de sistemas multifrecuencia, 48
Estirado ("lifting"), 1, 26
F
FOLI - Esquema de muestreo, 4, 46, 71, 74, 80, 83, 87,
88, 90, 91, 92, 93, 94, 95, 118
I
Integrador multifrecuencia irregular, 98
J
Jordan, 15, 25, 164, 166, 167
K
Kalman, 14, 64, 97, 167
Kranc, 1, 7, 14, 15, 16, 21, 22, 23, 24, 46, 47, 51, 54, 56,
101, 106, 107, 167
Mtodo de los operadores de Kranc, 14
Operador de Kranc, 22
ZOH Kranc, 23, 46, 51, 56
L
Lema 3.1., 35
Lema 3.2, 37
Lema 3.3, 50
Lema 3.4., 65
Lema 4.1., 79
Lifting ("estirado"), 1, 8, 16, 26, 53, 71, 86, 87, 103
M
Mapeo del modelo, 4, 10, 79, 83, 86, 87, 118, 119
MATLAB, 2, 3, 4, 5, 9, 48, 73, 90, 91, 94, 95, 96, 99,
101, 102, 103, 104, 105, 107, 109, 110, 120, 123, 128,
133, 135, 168, 169, 171
Enmascaramiento, 103
SIMULINK, 2, 3, 94, 101, 102, 103, 105, 107, 110,
171
Matriz de monodroma, 48
Meyer, 1, 14, 15, 16, 46, 47, 51, 168
Modelo discreto monofrecuencia a perodo base, 31
Moore, 92, 168
MRIC (Multirate Input Control), 57
N-delay Input, 17
MROC (Multirate Output Control), 61, 65
N-delay Output, 17
Muestreo irregular, 27, 28, 46
Esquema de muestreo irregular, 28
Muestreo regular, 27, 46, 54
Muestreo serial, 3, 46, 51, 52, 68, 69, 70, 71, 126
Multifrecuencia, 8
Multirate Control Toolbox (MATLAB), 3, 5, 48, 75, 101,
103, 104, 108, 134
O
Offset, 29, 34, 46
Sincronizacin, 34
Oscilaciones ocultas o rizado, 3, 4, 10, 13, 19, 26, 49, 75,
95, 117, 127, 135, 136
Uso de integradores, 121, 122, 124, 127, 129
Uso de muestreo irregular, 97
P
Parametrizacin de Youla o parametrizacin Q, 15, 18,
20, 78
Perodo base, 29
Perodo global, 29, 48
Poltica analtica de diseo, 20, 78
Poltica constructiva de diseo, 20, 78, 79
Problema con dos grados de libertad, 82
Problema con un grado de libertad, 80
Procesamiento digital de seales (DSP), 9, 104
Pseudo-medicin, 64, 94
Modelado y simulacin de sistemas con muestreo no convencional
174
R
Realimentacin del estado, 51, 64, 68, 76, 78, 82, 83, 86,
87, 90, 91, 93, 94, 95, 98, 125, 134, 135, 136
Rediseo digital, 85, 86, 87
Reduccin, 22
Restriccin de causalidad, 9, 19, 26, 47, 73, 78, 87
S
Salt, 1, v, 1, 16, 27, 37, 46, 51, 59, 60, 85, 164, 169, 171
S-Function, 102, 103, 107
Shift-invarying operator, 15
Shift-varying operator, 15
Sincronizacin u offset, 46
Sincronizacin u Offset, 34
Sistema multifrecuencia, 8
Sistemas peridicos, 8, 137
Sustituciones progresivas, 4, 7, 15, 24, 26, 32, 33, 38, 71
T
Tangirala, 96, 132, 170
U
Ubicacin de polos, 84
V
Vector de ndices de controlabilidad (CIV), 49
Vector de ndices de observabilidad (OIV), 49
Vectorizacin, 1, 22, 102, 104
Das könnte Ihnen auch gefallen
- Matriz Poder InteresesDokument6 SeitenMatriz Poder Intereseslgrome73100% (1)
- Requisitos Del Plan de ComunicacionesDokument28 SeitenRequisitos Del Plan de Comunicacioneslgrome73Noch keine Bewertungen
- Matriz de Stakeholders - Plantilla y EjemplosDokument10 SeitenMatriz de Stakeholders - Plantilla y EjemplosAlicioQuispe100% (1)
- Plan de Comunicaciones - Roles y ResponsabilidadesDokument24 SeitenPlan de Comunicaciones - Roles y Responsabilidadeslgrome73Noch keine Bewertungen
- Gestion de Valor GanadoDokument53 SeitenGestion de Valor Ganadocristina_07100% (2)
- Esquema de Comunicación Con Los InteresadosDokument3 SeitenEsquema de Comunicación Con Los Interesadoslgrome73Noch keine Bewertungen
- Stakeholder Analysis (Análisis de Los Actores)Dokument3 SeitenStakeholder Analysis (Análisis de Los Actores)lgrome73Noch keine Bewertungen
- Gestión de Los Stakeholders o Interesados Del ProyectoDokument9 SeitenGestión de Los Stakeholders o Interesados Del Proyectolgrome73Noch keine Bewertungen
- Ejemplo Identificacion de Stakeholders IntegracionDokument15 SeitenEjemplo Identificacion de Stakeholders Integracionlgrome73Noch keine Bewertungen
- Matriz de StakeholderDokument26 SeitenMatriz de Stakeholderlgrome73Noch keine Bewertungen
- Registro de Interesados - Edificio de Oficinas Torre BegoniasDokument6 SeitenRegistro de Interesados - Edificio de Oficinas Torre Begoniaslgrome73Noch keine Bewertungen
- Plantilla Entregables TOGAF 9 1Dokument20 SeitenPlantilla Entregables TOGAF 9 1federicoarchaNoch keine Bewertungen
- Mapa de Procesos & Matriz RasciDokument12 SeitenMapa de Procesos & Matriz Rascilgrome73Noch keine Bewertungen
- Matemáticas UniversitariasDokument168 SeitenMatemáticas Universitariaslgrome73Noch keine Bewertungen
- Estrategia de Gestión de Los StakeholdersDokument12 SeitenEstrategia de Gestión de Los Stakeholderslgrome73Noch keine Bewertungen
- Ejemplo Identificacion de Stakeholders IntegracionDokument15 SeitenEjemplo Identificacion de Stakeholders Integracionlgrome73Noch keine Bewertungen
- Tutorial Ecxell 97Dokument53 SeitenTutorial Ecxell 97Orlando Astudillo GomezNoch keine Bewertungen
- PMOInformatica - Plantilla Del Registro de Interesados Del ProyectoDokument5 SeitenPMOInformatica - Plantilla Del Registro de Interesados Del ProyectoGuially Julio Rivera RomeroNoch keine Bewertungen
- Programacion Lineal Capitulo 8Dokument14 SeitenProgramacion Lineal Capitulo 8Eduardo OrozcoNoch keine Bewertungen
- Diferenciabilidad de Funciones - OptimizacionDokument21 SeitenDiferenciabilidad de Funciones - Optimizaciondsteiner100% (1)
- Integral-Cálculo de ÁreasDokument17 SeitenIntegral-Cálculo de ÁreasMónica Lissette SánchezNoch keine Bewertungen
- Abb - Plc-Ac500 - 1txa125004b0703 - 0908Dokument44 SeitenAbb - Plc-Ac500 - 1txa125004b0703 - 0908isaac_2681100% (1)
- Excel7es 02-69Dokument68 SeitenExcel7es 02-69lgrome73Noch keine Bewertungen
- Limites y Continuidad de FuncionesDokument16 SeitenLimites y Continuidad de Funcionesangelluis100% (23)
- Combinatoria PDFDokument7 SeitenCombinatoria PDFrichanNoch keine Bewertungen
- CableadoDokument20 SeitenCableadoAlberto MoralNoch keine Bewertungen
- Aprenda Servlets de Java Como Si Estuviera en SegundoDokument65 SeitenAprenda Servlets de Java Como Si Estuviera en SegundoCarola Prada MartinezNoch keine Bewertungen
- Excel IntermedioDokument55 SeitenExcel Intermediolgrome73Noch keine Bewertungen
- Excel 97Dokument89 SeitenExcel 97lgrome73Noch keine Bewertungen
- Excel BasicoDokument62 SeitenExcel Basicolgrome73Noch keine Bewertungen
- EnsayoDokument26 SeitenEnsayoMartha Gabriela SanchezNoch keine Bewertungen
- Plan de Clases de InglesDokument6 SeitenPlan de Clases de InglesJuli Jimenez AlvarezNoch keine Bewertungen
- Carrera Ingenieria en Sistemas ComputacionalesDokument2 SeitenCarrera Ingenieria en Sistemas ComputacionalesAriel GarciaNoch keine Bewertungen
- Ejemplo 3 Esquema de FundamentosDokument1 SeiteEjemplo 3 Esquema de FundamentosAnonymous 1XOudpMHZANoch keine Bewertungen
- Discapacidad AuditivaDokument77 SeitenDiscapacidad AuditivaTanya PullasNoch keine Bewertungen
- DOI: 10.23857/dc.v5i3.959 Ciencias de La Educación Artículo de InvestigaciónDokument15 SeitenDOI: 10.23857/dc.v5i3.959 Ciencias de La Educación Artículo de InvestigaciónSofia LatorreNoch keine Bewertungen
- Luis Belttran Prieto FigueroaDokument3 SeitenLuis Belttran Prieto FigueroafranciscoNoch keine Bewertungen
- Quiz 1 - Semana 3 - Ra - Primer Bloque-Comercio Internacional - (GRUPO4) PDFDokument11 SeitenQuiz 1 - Semana 3 - Ra - Primer Bloque-Comercio Internacional - (GRUPO4) PDFNANCY SALINAS ROMERONoch keine Bewertungen
- Experimento Super AvanzadoDokument3 SeitenExperimento Super AvanzadoLodis Yiceth Cabrera MoreloNoch keine Bewertungen
- Sílabo de Inventario ForestalDokument4 SeitenSílabo de Inventario ForestalJade ButlerNoch keine Bewertungen
- Determinar Las Necesidades Del EntornoDokument4 SeitenDeterminar Las Necesidades Del Entornomary80% (10)
- Matriz de Consistencia - Sistema de Costos ABCDokument1 SeiteMatriz de Consistencia - Sistema de Costos ABCBrett BrownNoch keine Bewertungen
- Examen Parcial Forma 4Dokument12 SeitenExamen Parcial Forma 4Giulliana Alban50% (2)
- Carga Académica - Mtra. Diana Laura Rodriguez CoscaDokument2 SeitenCarga Académica - Mtra. Diana Laura Rodriguez CoscaDiianaRoOdriiguezNoch keine Bewertungen
- Ortografía Española OctavoDokument571 SeitenOrtografía Española OctavoCamila ledezmaNoch keine Bewertungen
- El Mundo Laboral Redescubriendo Mis Capacidades Como Trabajador PDFDokument92 SeitenEl Mundo Laboral Redescubriendo Mis Capacidades Como Trabajador PDFWilcas EmpresarialNoch keine Bewertungen
- Kant y La Imitación de CristoDokument10 SeitenKant y La Imitación de CristoGR HectorNoch keine Bewertungen
- Currículo InnovadorDokument4 SeitenCurrículo InnovadormerchinNoch keine Bewertungen
- Pensamiento lateral: aprender jugando, aprender pensandoDokument4 SeitenPensamiento lateral: aprender jugando, aprender pensandoOctavio OrtegaNoch keine Bewertungen
- HACIA UNA INTELIGENCIA EVALUATIVADokument19 SeitenHACIA UNA INTELIGENCIA EVALUATIVAOsvaldoNoch keine Bewertungen
- 2° GRADO DOSIFICACIÓN 3er. TRIMESTRE GRADO 2023-2024Dokument25 Seiten2° GRADO DOSIFICACIÓN 3er. TRIMESTRE GRADO 2023-2024fanny RodríguezNoch keine Bewertungen
- Trastornos de Personalidad Psicopatología y Nivel de Riesgo en Una Muestra Chilena de Hombres Maltratadores Ocho Tipos de Maltratadores - 49-55Dokument86 SeitenTrastornos de Personalidad Psicopatología y Nivel de Riesgo en Una Muestra Chilena de Hombres Maltratadores Ocho Tipos de Maltratadores - 49-55CarlNoch keine Bewertungen
- Evaluación diagnóstica de Matemática SEC5Dokument9 SeitenEvaluación diagnóstica de Matemática SEC5Adolfo Yanqui TacayNoch keine Bewertungen
- Gestores bibliográficos en ingenieríaDokument10 SeitenGestores bibliográficos en ingenieríaJames LopezNoch keine Bewertungen
- Lectura 3 - Protocolo Del Formador TutorDokument21 SeitenLectura 3 - Protocolo Del Formador TutorJanette Grández GarcíaNoch keine Bewertungen
- GLOOR, Daniel André (2013), El Arte de Vivir. Corrientes Filosóficas en Tiempos Del Nuevo Testamento. San José. Editorial SEBILADokument160 SeitenGLOOR, Daniel André (2013), El Arte de Vivir. Corrientes Filosóficas en Tiempos Del Nuevo Testamento. San José. Editorial SEBILAMauricio Zúñiga100% (2)
- Subcultura, Contracultura, Tribus Urbanas y CulturasDokument12 SeitenSubcultura, Contracultura, Tribus Urbanas y CulturasDanaé OlivaresNoch keine Bewertungen
- Aprendizaje SignificativoDokument44 SeitenAprendizaje SignificativoJaime Olivos DazaNoch keine Bewertungen
- Plan de Estudios 2012 LepriDokument23 SeitenPlan de Estudios 2012 LepriRaúl David Jiménez SantosNoch keine Bewertungen
- Los Mejores Juegos Scouts I de XDokument3 SeitenLos Mejores Juegos Scouts I de XCespedes DanielNoch keine Bewertungen