TRANSMISSION
O +P lhydraulik und Pneumatik 45 (2001) Nr. 9
Adaptive servo-control concept for
the non-interacting control of
electrohydraulic systems
HEIKO BAUM
Introduction
The requirements to be met by servo-
control structures for fluid systems are
becoming increasing stringent as a result
of their growing complexity. The
majority of servo-control structures are
still based on classical closed-loop
control concepts with PIDT
1
controllers,
which means that there is an increasing
number of interacting parameters to be
taken into consideration when tuning the
controller. Aiming to simplify the
parameterisation work involved in the
design and commissioning of servo-
control systems, a tool has now been
developed within the framework of a
DFG-sponsored project at the IFAS, that
is capable of processing the requisite
closed-loop control concepts in a
practical manner. At the same time, it
releases the commissioning engineer from
the need to acquire an in-depth
knowledge of complicated servo-control
systems.
The design and planning measures to
be implemented for the configuration of a
hydraulic system have already been
presented in the O&P article entitled
"CAE tool for the simplified
commissioning of electrohydraulic
systems with multivariable control
systems" (Baum /BAU00/). That article
also discussed the theoretical aspects of
load sensing, presented a suitable test rig
and described the tools and controller
structures required to isolate the servo-
control system, as well as integrating
these into the DSHplus simulation
program /FLU01/.
The tool is tested on an adaptive
servo-control concept for the
aforementioned load-sensing system in
this article, by way of an example.
Beginning with the field of activity for
the system, as defined in the tender and
performance specifications, the controller
parameters that will be needed later are
already calculated automatically by
means of simulation during the
configuration stage. In addition to this, by
interfacing the control hardware to the
simulation model, the servo-control
concept can be tested and pre-
parameterised before the real drive is
built. The final commissioning of the
load-sensing system and a comparison
between the simulated results and the
measured values clearly illustrate the
potential offered by this tool.
Presenting the servo-control
concept
It is theoretically possible to design both
hydro-mechanical and electrohydraulic
load-sensing systems, including the
associated closed-loop control systems,
for any operating points. In the light of
the various types of load-sensing systems
that can be realised, it is necessary to
restrict the study to the electrohydraulic
load-sensing system presented here. A
detailed analysis on the practical
application of autonomous servo-control
systems can be found in Baum /BAU01/,
which also describes the adaptive servo-
control concept presented here in the
form of extracts.
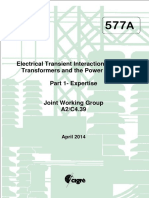
Figure 1 shows a general concept for
isolation of the servo-control system. This
concept makes use of the preliminary
work on hydraulic cylinder drives and
rotary units in the digital control loop
conducted at the IFAS. Without going
into the details of this work any further
detailed information can be found in
Klein /KLE93/, Boes /BOE95/ and
Weishaupt /WEI93/ it is true to say that
the purpose of the adaptive servo-control
systems that were successfully tested on
fluid systems is to use the fluid axis with
user-defined dynamic system
performance to the extent permitted by
the limits of technical feasibility.
One remarkable aspect of the
autonomous servo-control concept that
1: General concept for an autonomous multivariable control system
xreq
xact
x, x, x
xs, xs, xs
Fload ,Mload
axis
axis
Identifi-
cation
Controller
Adaptation
pmax;Tfluid
nreq
nact
Iload ,Tload
Identifi-
cation
Controller
Adaptation
axis
axis
nreq
req
act
nact pump
vol_system
xreq
x
act
axis1
axis1
nact
axis2
axis2
n
req
pmax axis2
pmax axis1
pmax;Tfluid
ppump;Tfluid
Hydraulic cylinder axis
in the digital control loop
Autonomous servo-control
systemfor meshed
multivariable systems
Adaptive angular
travel controller
Pressure supply
to the electro-hydraulic
load-sensing system
Hydraulic rotary unit
in the digital control loop
Dr.-Ing. Heiko Baum
FLUIDON Gesellschaft fr Fluidtechnik mbH
Jlicher Strae 336, 52070 Aachen
currently employed on the scientific staff at the
Institute of Fluid Power Transmission and Control
(IFAS) at RWTH Aachen, Director: Univ. Prof.
Dr.-Ing. H. Murrenhoff
TRANSMISSION
O +P lhydraulik und Pneumatik 45 (2001) Nr. 9
we are aiming for here is that, while every
fluid axis constitutes a closed control
loop in itself, each one also influences the
pressure control loop of the load-sensing
system in its capacity as a load with
known dynamic performance. The known
dynamic performance is nothing more
than the dynamic response determined by
the project engineer's selection of "ideal
poles".
This ideal dynamic performance is
enabled by the fact that the operating-
point-specific feedback vector parameters
for the status control system in these
concepts are either calculated by means
of analysis or read out of tables for
adaptation. Irrespective of the method
used to dimension the various axes,
calculation of the feedback vector can be
essentially disassociated from the design
of the autonomous servo-control system.
Although this reduces the complexity of
the configuration to a considerable extent,
integration into a load-sensing system
does require adaptation to the changing
system pressure of the load-sensing
system.
The only important aspect for the
controller synthesis performed here is that
the various fluid axes which are acting as
loads are only characterised by the
natural frequency
0
and attenuation
parameters from the autonomous servo-
control system's point of view. This is
possible because the studied fluid axes
can be described very well by a second or
third-order PT
N
system for macroscopic
examination, in spite of the fact that they
must be portrayed as higher-order
systems when examined more closely in
the course of configuration. This means
that only the dynamic system
performance identified by the respective
axis controller or defined by the user, and
the controller parameters calculated for
the respective operating point during
decoupling, must be known for open-loop
adaptation of the autonomous servo-
control system. Figure 2 shows the
principle of the way in which this open-
loop adaptation can be realised.
Contrary to what would appear
advisable according to the preliminary
theoretical study, both pressure controller
and angular travel controller have been
realised as full-scale PIDT
1
controllers, as
generally applicable basic controllers are
required. Unsuitable for pressure control,
the controller's I component is set to zero
automatically and eliminated during
automatic parameter computation.
Open-loop adaptation of the controller
actually takes place later as a function of
the respective operating point. Unlike the
other work presented in connection with
open-loop adaptation up to now, the data
records required for this are stored in the
form of a neuronal database rather than
being summarised in tables. The loop
controller parameters depend on the
following influencing variables:
req
as
the volume flow parameter, p
pump
as the
pressure parameter, T
fluid
as a measure of
the changing dynamic system
performance over the fluid temperature
and the dynamic characteristics
0
and
0
of the connected loads.
A PIDT
1
controller also offers an
adequate solution for the interface
controller used to decouple the influence
of the loads from the closed-loop pressure
control system. An analysis of the work
performed in connection with meshed
load-sensing system up to now shows that
the closed-loop pressure control system
can be isolated from the influence exerted
by the loads to an adequate extent by
feeding the sum of the velocity
differences, weighted according to the
active cylinder surfaces or absorption
capacity, back to the angular travel
controller. This is nothing other than the
accumulation of all volume flow values
that the system lacks to achieve the
currently required operating point,
however. All of the system variables
required to determine this value must be
available for calculation of the specified
angular travel, which means that it can be
easily generated within the servo-control
system and used as an input variable for
the interface controller. On the other
hand, a neuronal database is used to apply
open-loop adaptation to the various
operating states.
Automatic generation of loop
controller parameters
The first stage of the work performed
within the framework of configuration
normally involves defining the
requirements profile that constitutes the
framework for development of a fluid
system. The requirements profile is
usually defined by the customer as he has
all of the information required to ensure
subsequent smooth integration of the
drive into the system as a whole at his
disposal.
Practical experience has shown that it
is a good idea to formulate tender and
performance specifications as the basis
for subsequent realisation of the drive
concept on the part of the contractor
(refer to Figure 3).
Tender and performance
specifications offer a means of
formulating the customer's wishes and
requirements in a systematic, rational
req
act
n
act pump
vol_system
x
req
x
act
axis1
axis1
n
act
axis2
axis2
n
req
p
max axis2
p
max axis1
K
p
K
i
K
d
p
LS-req
p
LS-act
p
max load
p
pump
PIDT
1
-Controller
p
pump
Max
K
p
K
i
K
d
req
PIDT
1
-Controller
T
fluid
T
fluid
p
pump
axis1
axis1
axis2
axis2
Q
axes
req
Pressure regulator
with neuronal
adaptation
Parameter
network
Parameter
network
Coupling controller
with neuronal adaptation
Adaptive angular
travel controller
Autonomous servo-control concept
for the pressure supply to the
electro-hydraulic load-sensing system
2: Principle of open-loop adaptation with neuronal networks
TRANSMISSION
O +P lhydraulik und Pneumatik 45 (2001) Nr. 9
manner, and of defining and recording
development objectives in terms of
engineering requirements, as well as the
permitted time scale and budget. Tender
and performance specifications may be
characterised in the following manner
along the lines of VDI/VDE Guideline
3694 of 1991 in accordance with
Kleinaltenkamp /KLE95/:
The tender specification must take the
requirements into consideration from
the user's point of view, including all
boundary conditions. It defines WHAT
is to be solved and FOR WHAT.
The performance specification gives a
detailed description of the application
requirements and describes the
realisation requirements. It defines
HOW the requirements are to met and
WITH WHAT.
In terms of a general, parameter-based
study of the fluid system, the
requirements laid down in the tender and
performance specifications also
characterise the operative range of the
drive and therefore provide the boundary
conditions for subsequent optimisation of
the initial system design. The purpose of
automatic optimisation is then to
transpose this scope of requirements onto
the facilities of the CAE tool.
The simulation mode required to
compute the loop controller parameters is
inevitably oriented to the circuit diagram
for the load-sensing system presented in
Baum /BAU00/. The simulation model is
therefore not described in greater detail in
this article. Figure 4 shows the
simulation model that has been generated
for the purpose of computer-aided
autonomisation. The neuronal networks
and the hardware interface have not been
integrated into this model yet for reasons
related to the computing speed.
The various hydraulic components
and loop-control components have been
combined into seven function groups
according to the tasks that they perform
and are printed against a grey background
for easier orientation. This article does
not describe these function groups in
detail, nor does it specifically present the
simulation results obtained during
automatic operative range simulation. As
the results are identical to those obtained
during simulation of the complete servo-
control concept, apart from open-loop
adaptation of the loop controller
parameters, they will be presented in that
section of the article.
Aiming to present the procedure for
computer-aided autonomisation in the
form of a consistent method, the next
section describes the way in which the
parameters required for adaptation of the
servo-control system are generated
automatically using the facilities
integrated into the CAE tool. Figure 5
shows the steps required for this in their
logical order.
The operative ranges of the system
laid down in the tender and performance
specifications during the drive's design
phase constitute the starting point for
generation of loop-controller parameters.
In this case, these ranges are defined by
the maximum system pressure, the
maximum volume flow and the power
limitations of the drive motor and the
hydraulic components. Efforts should be
made, however, to narrow this maximum
possible operative range down to the
greatest extent possible, allowing for the
drive's later operating environment. This
enables the number of operating points
investigated during parameter
Requirements profile
Tender specification
Scope of requirements
Ideas
Customer
Formulation
Approval
Information
Contractor
Performance
specification
Specification of the
solution concept
Formalisation of the
solution concept
3: Implementation of
the customer's
requirements in a
performance
specification
4: Simulation model
for computer-aided
autonomisation
Speed control
Assessment of the
control quality
Loading unit
and external
control fluid supply
Drive with
LS pump
Meshed
LS control
Hydraulic
axis
Secondary axis
Guetefunktional1
Q
dp
MWDruck
nEMotor
LS_Pumpe
EMotor
Regelventil_Motor
PT2
QSSV
Stoersignal
SSV
Stoergroesse
V2
Leitung
Stellzylinder
1 2
pSteuerdruck
Steuerdruckuebersetzer
Regelventil_Pumpe
PT2
y_Schwenkwinkel_diff y_soll Summe4
1
2
3
Soll_Schwenkwinkel
Ys
PDT1_Schwenkwinkel
pVersorgung
Versorgung
GueteDruck
ITSE
GueteDrehzahl
ITSE
n2
DruckNormierung
n1
DrehzahlNormierung
Guete
D1
D2
Summe1
1
2
3
Summe2
1
2
3
QMotor
QTank
QPumpe
signal_stell
Lastsignal
DBV_Last
Last3
Last2 Last1
RV4 RV3
RV2 RV1
Kupplung
PDT1_ druck
p_diff1
Summe3
1
2
3
y_s_Stell
yK
PDT1_Koppelregler
yD
y_stell_drehzahl
s4
s3
s2
s1
prop_glied
Integrierer Schalter
n_soll
n_ist
n_diff
1
2
3
Lastpumpe
Druckleitung
p_diff
1
2
3 alpha_ reg p_LS_soll
Y_Pumpe
p_B p_A
Lastmotor
Drehzahlvorgabe
LS_Druck
Ruecklauf
Vorlauf
5: Steps for automatic generation of the loop controller parameters
TRANSMISSION
O +P lhydraulik und Pneumatik 45 (2001) Nr. 9
computation to be reduced drastically,
which also reduces the computing time
accordingly.
Characteristic operating points are
selected once the operative range has
been narrowed down. Apart from the
marginal area, these operating points
must also cover the entire operative range
with an adequately dense grid in order to
avoid having to interpolate over
excessively large distances during
subsequent adaptation of the loop
controller parameters. In other respects,
these operating points can also be
described by means of specific operating
parameters, such as rpm, system pressure,
angular travel etc., according to the drive
concept and the selected components.
These parameters are combined to
produce a configuration file for automatic
computation, which is transferred to the
memory.
Having loaded the set of parameters
for an operating point, underlaid
optimisation of the set of loop controller
parameters belonging to the operating
point in question is started automatically.
The variation ranges of the model
parameters to be optimised during the
process are initially defined here in a
similar way as for the parameter
variation. If the boundary conditions for
optimisation have been entered, they may
be started or the configuration transferred
to the memory.
A quality criterion must be defined,
however, before commencing
optimisation, whereby the definition of
this quality criterion assumes central
Neuronal database of the loop controller
parametersimportance with respect to
optimisation of the servo-control system.
It offers a means of assessing the control
results in an objective, reproducible
manner. The integral or planar criteria
that record the quality of the system with
a single numerical value are most suitable
for the current optimisation task. The
speed deviation is analysed, as well as the
difference in pressure and both measures
of quality are weight to calculate an
overall quality value. If there is a sudden
change in load or speed during the
simulation on which optimisation is
based, the time constants for the quality
criteria are reset in order to prevent the
later change in the controlled system
brought about by the optimisation
algorithm being overrated.
If the level of accuracy or maximum
number of simulations defined in the
optimisation algorithm is reached during
the simulation of an operating point, the
loop control parameters of the simulation
7: Neuronal database of the loop controller parameters
Speed range
f or the drive [rpm]
Pressure range
for t he drive [bar]
Variation of loop controller parameter
" Kp_Pressure" over the operative range
5
0
07
0
09
0
0
1
1
0
0
1
3
0
0
1
5
0
0
0
2
0
4
0
6
0
8
0 1
0
0 1
2
0 1
4
0
0
0,375
0,75
1,125
1,5
1,875
2,25
2,625
3
3,375
3,75
4,125
4,5
4,875
5,25
5,625
6
P
a
r
a
m
e
t
e
r
K
p
[
V
/
m
m
]
Pr essure range
for t he drive [bar]
5
0
0
6
0
0
7
0
0
8
0
0
9
0
0
1
0
0
0
1
1
0
0
1
2
0
0
1
3
0
0
1
4
0
0
1
5
0
0
0
20
40
60
80
100
120
140
0
0,0075
0,015
0,0225
0,03
0,0375
0,045
0,0525
0,06
0,0675
0,075
0,0825
0,09
0,0975
0,105
0,1125
0,12
P
a
r
a
m
e
t
e
r
K
d
[
s
]
Variati on of loop control ler parameter
" Kd_Couple" over the operat ive range
Speed range
for t he drive [rpm]
6: Parameter ranges for the pressure regulation system
Variati on of the DSH network l oop cont roll er parameter
" Kp_Pressure" over the operative range
Speed range
for the dri ve [rpm]
Pressure range
for the drive [bar]
5
0
07
0
09
0
0
1
1
0
0
1
3
0
0
1
5
0
0
0
2
0
4
0
6
0
8
0 1
0
0 1
2
0 1
4
0
0,00
0,38
0,75
1,13
1,50
1,88
2,25
2,63
3,00
3,38
3,75
4,13
4,50
4,88
5,25
5,63
6,00
P
a
r
a
m
e
t
e
r
K
p
[
V
/
m
m
]
Pressure range
for the drive [bar]
Variati on of the DSH network l oop cont roll er parameter
" Kd_Coupl e" over the operat ive range
5
0
0
7
0
0
9
0
0
1
1
0
0
1
3
0
0
1
5
0
0
0
20
40
60
80
100
120
140
0,00
0,01
0,02
0,02
0,03
0,04
0,05
0,05
0,06
0,07
0,08
0,08
0,09
0,10
0,11
0,11
0,12
P
a
r
a
m
e
t
e
r
K
d
[
s
]
Speed range
f or the dri ve [rpm]
8: Simulation model with neuronal networks and HIL interface
Interface
from the
hardware
EthaVolSystem
SWVorgabe
nIst nSoll vIst vSoll
Schaltsig2
FG2
DPS1
RS4
EB4
RS3
EB3
RS2
EB2
RS1
EB1
Signal1
Schaltsignal2
OKd
NKd
Kd_Offset
Kd_Network
1
2
3
n
1
2
n
F1
F2
F3
Fn
F1
F2
Fn
SKd
OKp
NKp
Kp_Offset
Kp_Network
1
2
3
n
1
2
n
F1
F2
F3
Fn
F1
F2
Fn
SKp
OKd_Kop
NKd_Kop
Kd_Kop_Offset
Kd_Kop_Network
1
2
3
n
1
2
n
F1
F2
F3
Fn
F1
F2
Fn
SKd_ Kop
OKp_Kop
NKp_Kop
Kp_Kop_Offset
Kp_Kop_Network
1
2
3
n
1
2
n
F1
F2
F3
Fn
F1
F2
Fn
SKp_ Kop
InternerSignal
DVBVerstellung
S_Motordrehzahl_mess
S_Schwenkwinkel_mess
Vb
Rb
Va
Ra
Regelventil_Motor
PT2
K
K
K
K
SRVM S_RVM S4
1
2 3
StZyH
Handschwenkwinkel
StZyR S3
1
2 3
Schaltsig1
FG1
Drehzahl
Last
ZPS1
pLastDBV_mess
Schwenkwinkel_mess
pPB_mess
pPA_mess
pPumpe_mess
nMotordrehzah_mess
Messwerte1
DBVSignal
DBVKennfeld
S_Motordrehzahl
FunktionsGenerator1
pLSDruck S1
1
2
3
SchwenkwinkelPumpe
WU1
mAntriebspumpe
SollLeer
SignalLeer
leer1
Echtzeitdiff S2
1
2
3
MW15
MW14
MW13
LastSignal
Out
M-DA4-2
Sollwerte
Stellwerte
M-AD12/16
Messwerte
DSHplus
Hilfgren
In
M-DA4-2
Stellwerte
M-AD12/16
Messwerte
SORCUSZeit
SIMZeit
PCEchtzeit
PCEchtZeit
SimZeit
SORCUSZeit
MW12
MW11
MW10
Motordrehzahl
Schwenkwinkel_Pumpe
Abntriebsdrehzahl
Antriebsmoment
p_PLastDBV
Antrienbsleistung
p_PB
p_PA
p_Versorgung
p_Pumpe
SollSchwenkwinkel
nDrehzahlIst
nDrehzahlSoll
pLSDruckSoll
PumpenDBV
Kd_Kop
mwdrehzahl
MWDrehzahl
Kp_Kop
LastSig MWDruck
mwpd
Kd
Kp
nEMotor
LS_Pumpe EMotor
V2
Leitung
Stellzylinder
1 2
pSteuerdruck
Steuerdruckuebersetzer
Regelventil_Pumpe
PT2
S_LastDBV
pVersorgung
Versorgung
QMotor
QTank
QPumpe
signal_ LastDBV
Lastsignal
DBV_Last
Last3
Last2 Last1
RV4 RV3
RV2 RV1
Kupplung
S_Schwenkwinkel
Lastpumpe
Druckleitung
Y_Pumpe
p_B p_ A
Lastmotor
Drehzahlvorgabe
LS_Druck
Ruecklauf
Vorlauf
Hydraulic axis
Drive with
LS pump
and
control fluid
supply
Loading unit
Input signal
Interface
to the
hardware
Adaptive angular
travel input
Interface to
measuring data
import
Neuronal database
of loop controller
parameters
TRANSMISSION
O +P lhydraulik und Pneumatik 45 (2001) Nr. 9
mode that apply at this moment are
transferred to the memory. The parameter
variation loads the next operating point
and the optimisation process starts again.
Automatic simulation stops running when
all of the selected operating points have
been computed. The result is a list of data
records containing the parameters that
define the various operating points, as
well as the optimised loop controller
parameters.
The following configuration stage
initially involves processing the
calculated loop-controller parameters in
such a way that they can be used to
design the servo-control hardware. To
this end, the CAE tool offers a function
that enables the selection of specific
parameters from any number of parameter
data records and stores them in a file.
These are the optimised loop control
parameters and the system parameters
that characterise the various operating
points in this case. The selected
parameters served as training data for the
artificial neuronal networks.
Figure 6 shows the changes in loop
controller parameters "K
p
-Pressure" and
"K
d
-Interface" for the pressure regulation
system applied over the defined operative
range of the drive, by way of example, in
order to illustrate the transformation of
the calculated parameter base into the
neuronal parameter base. The angular
travel of the pump has been converted
into motor rpm for this.
The parameter levels for the two
control parameters following training of
the neuronal networks shown in Figure 7
indicate the appearance of the neuronal
data base for the servo-control concept,
calculated from this initial data. If the
original parameter levels are compared
with the neuronal reproductions, it is
evident that the fissured surface of the
exactly calculated values has been
transformed into a homogeneous
parameter level as a result of training the
network.
This corresponds exactly to the good
approximation characteristic of the
neuronal network. Efforts are made to
calculate a solution with the least mean
error for all samples by means of the
training. The reproduced are somewhere
between the maximum and minimum
values of the exactly computed loop
controller parameters, there are no
disadvantages involved in using the
neuronal networks in the adaptive
pressure regulator. It is, however, clearly
evident that, where pronounced changes
are required in the controller parameters
as a function of the operating points,
these are also mapped by the neuronal
parameter levels. When computation of
the neuronal database has been
completed, it is then integrated into the
concept as a whole and undergoes initial
testing in a hardware-in-the-loop
simulation.
The simulation model of the load-
sensing system shown in Figure 8 is
essentially based on the model presented
above in Figure 4. It has been
supplemented, however, by the neuronal
database, the interfaces to the servo-
control hardware and a measuring data
import facility, that is capable of
processing both measures and simulated
results.
The drive with load-sensing pump,
hydraulic axis and loading unit function
groups correspond to the function groups
already mentioned above. The secondary
axis function group and all closed-loop
control function groups are superfluous,
however, as these are replaced by the
adaptive servo-control concept. The
function groups described briefly in the
following are added as new elements:
Setpoint input: This function group
contains the function generators with
setpoints that characterise the various
operating points of the drive. More
specifically, these are the specified
load-sensing pressure difference, speed
and load pressure values. The function
generators supply the setpoint values
for the simulations, as well as for the
test benches.
Interface to the hardware: This
component has been specially designed
to enable communication with the
hardware. The four inputs at the top
represent the outputs of the D/A
converter, the next sixteen inputs
represent the inputs of the A/D
converter and the other inputs are used
as supplementary inputs, e.g. for the
parameters of the neuronal database.
The test rig hardware can be addressed
directly via the D/A converter terminals
according to the respective operating
mode. The A/D converter terminals
constitute the actual interface to the
HIL. If the test rig is simulated in the
computer, the signals output to the
controller hardware from the simulation
model replace the actually measured
values.
Interface from the hardware: This
component is the counterpart to the
component described above. Here too,
the first four outputs represent the
outputs of the D/A converter and the
next sixteen outputs represent the inputs
of the A/D converter. The following
three inputs supply auxiliary
information, e.g. the timing period for
the controller hardware.
If the simulation model is operated in the
HIL, the outputs of the D/A module
supply the controller correcting values
calculated for the controller hardware. If
the controller hardware is used in test-rig
mode, the signals output to the drive's
actuators by the hardware are output to
the results memory of the simulation
model for documentation purposes.
Irrespective of whether the interface is
operated in HIL or test-rig mode, each of
the A/D converter's inputs always
supplies the value of the sensor that is
designated by the name of the subsequent
signal node. This means that access to the
neuronal database is always the same for
both HIL and test-rig modes. The sensor
signals are scaled in the way determined
by the parameters of the respective sensor
in the interface dialogue.
The simulation model also contains
the following function groups, that are not
explained in any greater detail here:
Interface for measuring data import
Adaptive angular travel input
Neuronal database for the loop
controller parameters
At this point, it should be mentioned that
the closed-loop control assemblies that
have now become obsolete are not
removed from the simulation until the
results for the hardware controller match
the results for these function groups. This
makes it much easier to develop the loop
controller algorithms, particularly as the
target hardware permits the use of object-
oriented source code for real-time
9: Operative range
of the drive with
overlapping load
and speed changes
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 5 10 15 20 25 30
Time in s
A
c
t
i
v
a
t
i
o
n
o
f
t
h
e
p
r
e
s
s
u
r
e
c
o
n
t
r
o
l
v
a
l
v
e
i
n
%
0
200
400
600
800
1000
1200
1400
1600
S
p
e
c
i
f
i
e
d
s
p
e
e
d
o
n
t
h
e
h
y
d
r
a
u
l
i
c
a
x
i
s
i
n
r
p
m
Specified load
Specified speed
TRANSMISSION
O +P lhydraulik und Pneumatik 45 (2001) Nr. 9
programming. It is therefore not only
possible to use the actual controller
source code in HIL simulation or test-rig
mode, but also in SIL mode that enables
analysis of the controller results using
modern software tools (debuggers).
Commissioning the drive
The simulations performed in order to
determine the loop controller parameters
for the autonomous servo-control concept
were not oriented to any specific
operating cycle. On the contrary,
computer-aided autonomisation involved
approaching a certain operating point
repeatedly with changes in load and speed
until such time as the optimum loop
controller parameters were determined
for this using the algorithm. The resulting
set of all optimised loop controller
parameters makes up the neuronal
database for open-loop adaptation. If the
practical applicability of this database is
to be investigated, attempts must be made
to simulate a representative load cycle for
the drive.
The load-sensing system described
above is a test rig and not a real system,
e.g. installed in a mobile application,
which means that the representative load
cycle must be generated by artificial
means. The important factor in this
context is to ensure that all of the
operating points are approached that
result in extreme loads on the drive.
These specifically include the operating
points that describe the performance
limits of the drive and the operating
points that represent the most critical
dynamic boundary conditions, e.g. low
attenuation with the drive running at slow
speed under low load. Figure 9 shows an
operating cycle generated in accordance
with these boundary conditions.
Beginning with the test rig at a
standstill, the drive initially approaches
an operating point where the motor speed
is 500 rpm with a proportional pressure
control valve set to 20 % of its operative
range within 10 s. The load moment
determined for the motor by the position
of the proportional pressure control valve
can be calculated from the characteristic
of the valve and the load pump data, or
read off from the simulation results. The
characteristic for valve activation is
realised by a characteristics map in the
simulation. The load-sensing pressure
difference is adjusted to 30 bar until the
initial operating point is reached.
From this operating point, changing
speed and load pressure setpoints are
superimposed over a period of 10 s. Each
parameter is maintained constant for 2 s.
The simulation runs through all of the
operating points that characterise the
dynamic performance of the load-sensing
system during the measuring cycle. At the
end of the changing speed and load run,
the test rig has returned to the initial
operating point and is brought to a
standstill again during the next 10 s. HIL
simulation of the drive is not described in
detail in this article; please refer to the
detailed information given in
Baum /BAU01/. This publication also
describes the way in which the individual
control loops can be commissioned in
succession to demonstrate that the
automatically computed loop control
parameters offer a very suitable means of
achieving stable operation of the meshed
loop controller in the load-sensing
system, therefore achieving non-
interacting control. In this connection,
one aspect that must be evaluated very
0 6 12 18 24 30
Time [s]
pLoadDBV_meas.Value 0 bis 240 bar
nSpeedl_meas.Value 0 bis 2000 1/min
nSpeedReq.Value 0 bis 2000 1/min
0 6 12 18 24 30
Zeit [s]
nSpeedl_sim.Value 0 bis 2000 1/min
pLoadDBV_sim.Value 0 bis 240 bar
nSpeedReq.Value 0 bis 2000 1/min
10: Comparison of speeds and load pressure values
0 6 12 18 24 30
Time [s]
pPB_sim.Pressure 0 bis 220 bar
pPA_sim.Pressure 0 bis 220 bar
pPump_sim.Pressure 0 bis 220 bar
0 6 12 18 24 30
Time [s]
pPB_mess.Value 0 bis 220 bar
pPA_mess.Value 0 bis 220 bar
pPump_mess.Value 0 bis 220 bar
11: Comparison of system pressure values
0 6 12 18 24 30
Time [s]
S_MotorSpeed_sim.Value -5 bis 10 V
S_AngularTravel_sim.Value -10 bis 20 V
0 6 12 18 24 30
Time [s]
S_MotorSpeed_mess.Value -5 bis 10 V
S_AngularTravel_mess.Value -10 bis 20 V
12: Comparison of actuating signals
0 6 12 18 24 30
Time [s]
Kd_Kop.Value 0 bis 200 ms
Kd.Value 0 bis 200 ms
Kp.Value 0 bis 4 V
Kp_Kop.Value 0 bis 4 V
0 6 12 18 24 30
Time [s]
Kd_Kop.Value 0 bis 200 ms
Kd.Value 0 bis 200 ms
Kp.Value 0 bis 4 V
Kp_Kop.Value 0 bis 4 V
13: Loop controller parameters (simulation on the left, measured values on the
right)
TRANSMISSION
O +P lhydraulik und Pneumatik 45 (2001) Nr. 9
positively is that this is also possible
when the control parameters are
computed by a test-rig simulation model
that has been parameterised on the basis
of catalogue data to a great extent, rather
than being optimised with respect to the
non-linearity of the real test rig. This is
where the positive characteristics of the
selected PDT
1
controller described in
Baum /BAU00/ come into their own.
The results obtained while
commissioning the drive are described
briefly below. A direct comparison is
made between measured data and the
results of HIL simulation, whereby
attention is specifically drawn to the
special features of the load-sensing
system. The presented simulations are
performed using a simulation model for
which the parameterisation has been
improved by analysing the results of tests
conducted on the test rig. Previously
parameterised solely on the basis on
manufacturer's data sheets, the model can
now be upgraded by the real friction
conditions, the inertia of the connected
shafts and the real valve characteristics
measured at the test rig on-line with the
CAE tool during commissioning. The
setpoint values used in the simulation are
identical to the characteristics described
in the load profile.
Figure 10 shows a comparison
between simulated ( ) and measured ( )
motor speed, as well as between
simulated ( ) and measured ( ) load
pressure.
There is good conformance between
the simulated and measured load pressure
characteristics. This means that the
simulation model is capable of
reproducing realistic loading for the load-
sensing system. As far as speed is
concerned, there is also good
conformance between simulated and
measured data with respect to the
dynamic performance with the revised
model. No longer optimised after
parameter adaptation, the loop controller
parameters are not capable of giving the
system sufficient stability with respect to
a change in the influencing variable,
however. The loop controller parameter
base must be computed again for this.
The good conformance between the
dynamic responses of real and simulated
load-sensing systems is also evident in the
system pressure values shown in
Figure 11.
In this context, it is important that the
conformance between the simulated
pressure values ( , and ) and
measured pressure values ( , and )
does not only take place in the quasi-
stationary states at the beginning and end
of the measurement run, when the test rig
is slowly accelerating to the initial
operating point or decelerating again to a
standstill. It is also clearly evident that the
simulated load-sensing system
demonstrates the same dynamic pressure
fluctuations as the real drive during the
actual load profile, whereby the
amplitudes of the oscillations in the
simulation are approximately the same as
the amplitudes of the measured
oscillations. Furthermore, the kink in the
system pressure characteristic
( simulated, measured) shows that
the non-linear valve characteristic of the
closed-loop motor control system has
been taken into consideration in the
simulation model.
The comparison of actuating signals
shown in Figure 12 again confirms that
the simulation offers an expedient means
of emulating real system behaviour for
automatic computation of loop controller
parameters. The simulated ( ) and
measured ( ) actuating signals for the
speed control system match very well
when the reference speed variable
changes.
Differences do become evident,
however, if there are changes to the load
pressure influencing variable. As already
shown in the comparison of speeds, the
adaptive control in the simulation
demonstrates a very strong reaction to
changes in the influencing variable. The
system pressure is not maintained at a
constant level for a while and there is an
inevitable change in the speed of the
motor. The speed control system attempts
to implement corrective action here, as is
clearly shown by the differences between
simulated and measured actuating signals.
This means that efforts must be made to
improve the adaptive control system's
response to changes in the influencing
variable when the loop controller
parameter base is computed again.
A comparison of the simulated ( )
and measured ( ) correcting variables for
the angular travel controller indicates that
high-frequency oscillation is
superimposed on top of the actuating
signal on the real system. Measures must
be implemented to determine the cause of
this oscillation here as it becomes
obvious that this oscillation is
superimposed onto rapid changes in the
correcting variable of the type that occur
during the simulation. This causes the
drive to lose some of its dynamic
performance.
Figure 13 shows the open-loop
adaptation parameters that correspond to
the servo-control results presented here.
Both charts clearly show a symmetry
in the parameter adaptation between
starting and stopping the measurement.
The adaptation becomes "blurred",
however, when measured values are
compared with simulated values directly.
The networks' input variables are filtered
to a great extent for the measured values,
causing a certain smoothing of the
dynamic performance, to which the
network reacts accordingly.
Summary
To summarise, it may be said that the
open-loop neuronal adaptation of a servo-
control system presents a concept that
enables a simple, easy-to-use means of
decoupling a meshed multivariable
control system without the need for in-
depth, theoretical knowledge of closed-
loop control systems. The loop controller
parameters required for decoupling are
calculated automatically in an initial
approach using a simulation model that is
based on catalogue data. The hardware
required for closed-loop control of the
drive can then be developed and tested in
comfort, using the same simulation
model.
The subsequent commissioning of the
system shows that the calculated loop
controller parameters can also be
transferred to a real hydraulic system that
contains non-linearity not taken into
consideration during the first system
simulation. This is made possible by the
rugged construction of the PDT
1
controller used.
It is then possible to improve the
parameterisation of the simulation model
during commissioning to such an extent
by comparing measured data with
simulated data as to finally produce a
simulation model that is an exact replica
of the real test rig response. This
simulation model enables recalculation of
the loop controller parameter base, which
logically results in an improvement to the
control results. The "fine tuning" of the
control parameters performed on the
system by the commissioning engineer up
to now will be replaced - at least in part -
by an external "fine tuning" procedure
using the simulation model.
The control results could be improved
further by the implementation of a speed
control system that is also adaptive. This
adaptation was omitted within the
framework of the DFG project because of
the complexity involved. The aim was to
demonstrate the practical application of
TRANSMISSION
O +P lhydraulik und Pneumatik 45 (2001) Nr. 9
the presented methods to achieve
automatic decoupling of a meshed
multivariable control system. Appropriate
approaches to the adaptation of speed
control systems can be found in the
projects that served as the basis for the
servo-control concept realised here, but
these already exist. Determination of the
necessary loop controller parameters can
be directly integrated into the automatic
computation of the loop controller
parameter base.
The only other aspect that should be
mentioned at this stage is that all of the
measurements discussed in this article
were conducted with the CAE tool
connected to the real load-sensing system
via the hardware interface. This means
that the measured data is directly
available in the simulation model and can
be used for improvement or
parameterisation purposes.
Bibliography:
/BAU00/ Baum, H., Murrenhoff, H.: CAE-Tool zur
vereinfachten Inbetriebnahme von
elektrohydraulischen Systemen mit
Mehrgrenregelung [CAE tool for the simplified
commissioning of electrohydraulic systems with
multivariable control systems]
O+P lhydraulik und Pneumatik 44 (2000) No.
5, pages 321-330
/BAU01/ Baum, H.: Elektrohydraulisches Load-
Sensing mit selbsteinstellenden
Regelungskonzepten [Electrohydraulic load-
sensing with self-tuning control concepts]
Final report on DFG Project MU 1225/11-1
Aachen, March 2001
/FLU01/ N. N.: Benutzerhandbuch DSHplus 3.0
[User's manual for DSHplus 3.0]
FLUIDON GmbH, Aachen, 2001
/BOE95/ Boes, C.: Hydraulische Achsantriebe im
digitalen Regelkreis
Dissertation, RWTH Aachen, 1995
/KLE93/ Klein, A.: Einsatz der Fuzzy-Logik zur
Adaption der Positionsregelung fluidtechnischer
Zylinderantriebe [Using fuzzy logic for adaptation
of the position control systems for hydraulic
cylinder drives]
Dissertation, RWTH Aachen, 1993
/WEI95/ Weishaupt, E.: Adaptive
Regelungskonzepte fr eine hydraulische
Verstelleinheit am Netz mit aufgeprgtem
Versorgungsdruck im Drehzahl- und
Drehwinkelregelkreis [Adaptive control concepts
for a hydraulic actuating unit on the network with
impressed supply pressure in the speed and rotary
angle control loop]
Dissertation, RWTH Aachen, 1995
/KLE95/ Kleinaltenkamp, M., Plinke, W.:
Technischer Vertrieb Grundlagen [Fundamentals
of technical sales]
Springer-Verlag, 1995, page 550ff
Proof of figure:
Autor : Quelle
Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Operation and Maintenance Cost Estimator Final ReportDokument50 SeitenOperation and Maintenance Cost Estimator Final Reportklibi100% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Manual Protel99Dokument48 SeitenManual Protel99lgrome73100% (1)
- 3BDD011811-510 C en 800xa 5.1 Rev D For Freelance OperationDokument116 Seiten3BDD011811-510 C en 800xa 5.1 Rev D For Freelance Operationlgrome73Noch keine Bewertungen
- Combined Marine Propulsion Systems PDFDokument20 SeitenCombined Marine Propulsion Systems PDFMerrelNoch keine Bewertungen
- Simulation System Project ReportDokument36 SeitenSimulation System Project ReportAlifa SalsabilaNoch keine Bewertungen
- 577A Electrical Transient Interaction Between Transformers and The Power System PART 1Dokument176 Seiten577A Electrical Transient Interaction Between Transformers and The Power System PART 1Shailesh Chetty100% (1)
- Flow Assurance Engineering SolutionsDokument2 SeitenFlow Assurance Engineering Solutionsvpandya1981Noch keine Bewertungen
- LTEDokument160 SeitenLTEwaty5340Noch keine Bewertungen
- ADAMS - BASIC - TRAINING - and - EXAMPLES - B5Dokument172 SeitenADAMS - BASIC - TRAINING - and - EXAMPLES - B5dragishaNoch keine Bewertungen
- Aces From NLN Homecare NursingDokument6 SeitenAces From NLN Homecare Nursingapi-241772355Noch keine Bewertungen
- ERPSIM Game ReflectionDokument4 SeitenERPSIM Game ReflectionPuja RoyNoch keine Bewertungen
- ABB Industrial 800xaDokument12 SeitenABB Industrial 800xaUjjwal GhoshNoch keine Bewertungen
- Power Generation Portal (PGP)Dokument13 SeitenPower Generation Portal (PGP)angelmejias0% (1)
- Good For Inductor Selection and Output Capacitor SelectionDokument6 SeitenGood For Inductor Selection and Output Capacitor SelectionXin LuNoch keine Bewertungen
- PIC 16f877a Data SheetDokument234 SeitenPIC 16f877a Data Sheetanon-26401438% (8)
- Vs 1053Dokument80 SeitenVs 1053Daniela DinuNoch keine Bewertungen
- MAG3 SMT Datasheet RevD1Dokument4 SeitenMAG3 SMT Datasheet RevD1lgrome73Noch keine Bewertungen
- 3BDD011934-510 C en System 800xa Device Management 5.1 PROFIBUS and HART ConfigurationDokument258 Seiten3BDD011934-510 C en System 800xa Device Management 5.1 PROFIBUS and HART Configurationlgrome73Noch keine Bewertungen
- Agile TestingDokument29 SeitenAgile Testingpummy8Noch keine Bewertungen
- Javascript GuideDokument248 SeitenJavascript GuideHarsha_Vardhan_1274Noch keine Bewertungen
- Twi Do ManualDokument68 SeitenTwi Do ManualIsabella MagalhãesNoch keine Bewertungen
- Product Line CardDokument95 SeitenProduct Line Cardlgrome73Noch keine Bewertungen
- IEEE Five Bus Test SystemDokument3 SeitenIEEE Five Bus Test Systemlgrome73Noch keine Bewertungen
- 3BUS095072 L E en System 800xa System IntroductionDokument20 Seiten3BUS095072 L E en System 800xa System Introductionlgrome73Noch keine Bewertungen
- MPASM User S GuideDokument246 SeitenMPASM User S GuideMauricio Leiva MirandaNoch keine Bewertungen
- 3BSE069079 A en System 800xa System Guide SummaryDokument76 Seiten3BSE069079 A en System 800xa System Guide Summarylgrome73Noch keine Bewertungen
- 3BSE069330 C en System 800xa Solutions HandbookDokument139 Seiten3BSE069330 C en System 800xa Solutions HandbookShatrughna SamalNoch keine Bewertungen
- 3BSE062937 E en System 800xa 5.1 Product Catalog (FP4 Included)Dokument100 Seiten3BSE062937 E en System 800xa 5.1 Product Catalog (FP4 Included)lgrome73Noch keine Bewertungen
- 18fxx2 PDFDokument316 Seiten18fxx2 PDFChen CYNoch keine Bewertungen
- PIC18F6x20 8x20Dokument380 SeitenPIC18F6x20 8x20api-19831863Noch keine Bewertungen
- Manual - Macromedia - Flash MXDokument90 SeitenManual - Macromedia - Flash MXrare2109100% (31)
- TriRate SMT Datasheet RevD1Dokument4 SeitenTriRate SMT Datasheet RevD1lgrome73Noch keine Bewertungen
- Tips For Using Single Chip 3 12 Digit AD ConvertersDokument8 SeitenTips For Using Single Chip 3 12 Digit AD Converterslgrome73Noch keine Bewertungen
- MAG3 SMT Datasheet RevD1Dokument4 SeitenMAG3 SMT Datasheet RevD1lgrome73Noch keine Bewertungen
- Using PWM Output As A Digital-to-Analog Converter On A TMS320C240 DSPDokument21 SeitenUsing PWM Output As A Digital-to-Analog Converter On A TMS320C240 DSPasdejlNoch keine Bewertungen
- UltrasonicDokument5 SeitenUltrasoniclgrome73100% (1)
- Javascript GuideDokument248 SeitenJavascript GuideHarsha_Vardhan_1274Noch keine Bewertungen
- Building A Battery Operated Auto Ranging DVM With The IC7106Dokument6 SeitenBuilding A Battery Operated Auto Ranging DVM With The IC7106yb3hgfNoch keine Bewertungen
- Decodificador 7 Segmentos Con EPROMDokument2 SeitenDecodificador 7 Segmentos Con EPROMlgrome73Noch keine Bewertungen
- A Multi-Dimensional Spatial Policy Model For Large-Scale Multi-Municipal Swiss ContextsDokument17 SeitenA Multi-Dimensional Spatial Policy Model For Large-Scale Multi-Municipal Swiss ContextsMariza TalamantesNoch keine Bewertungen
- Variation Library Application NoteDokument18 SeitenVariation Library Application Noteraja273Noch keine Bewertungen
- Stephest AlgorithmDokument19 SeitenStephest Algorithmdah7542gmailNoch keine Bewertungen
- Heart Failure Simulation Reflection Rubric: Exceptional (100%) Proficient (50%) No Credit (0%) Content (10 Points)Dokument2 SeitenHeart Failure Simulation Reflection Rubric: Exceptional (100%) Proficient (50%) No Credit (0%) Content (10 Points)clarimerNoch keine Bewertungen
- Six-DOF CFD Simulations of Underwater Vehicle OperatingDokument24 SeitenSix-DOF CFD Simulations of Underwater Vehicle OperatingMol MolNoch keine Bewertungen
- Ergonomic design interventions for Indian plastic furniture factoriesDokument314 SeitenErgonomic design interventions for Indian plastic furniture factoriesfaysal karimNoch keine Bewertungen
- Course Information2009 2010Dokument4 SeitenCourse Information2009 2010shihabnittNoch keine Bewertungen
- Testing Innovation in The Real WorldDokument86 SeitenTesting Innovation in The Real WorldManvi PareekNoch keine Bewertungen
- ChipDesign Summer2014Dokument36 SeitenChipDesign Summer2014bhavaniprasad_k485Noch keine Bewertungen
- Moses ManualDokument392 SeitenMoses ManualAri Rizki RivaldoNoch keine Bewertungen
- Three-Dimensional Effects For Supported Excavations in ClayDokument7 SeitenThree-Dimensional Effects For Supported Excavations in ClayrkNoch keine Bewertungen
- Quick HelpDokument12 SeitenQuick HelpLeo TDNoch keine Bewertungen
- Final Paper-PRINCIPLES OF MANAGEMENT-2020Dokument9 SeitenFinal Paper-PRINCIPLES OF MANAGEMENT-2020Ali Zain ParharNoch keine Bewertungen
- Cfwi 2014 Technical Paper No 8 - BP To Developing SD Based WF ModelsDokument77 SeitenCfwi 2014 Technical Paper No 8 - BP To Developing SD Based WF ModelsPatri BarberNoch keine Bewertungen
- Study and Comparison of VM Scheduling Algorithm in Cloud Computing Using CloudSim SimulatorDokument7 SeitenStudy and Comparison of VM Scheduling Algorithm in Cloud Computing Using CloudSim SimulatorIJRASETPublicationsNoch keine Bewertungen
- 1 SIMUL8 User's Manual PDFDokument363 Seiten1 SIMUL8 User's Manual PDFnicusorandriesNoch keine Bewertungen
- The Role of Assessment in Competency-Based Medical EducationDokument8 SeitenThe Role of Assessment in Competency-Based Medical EducationMaria PalaciosNoch keine Bewertungen
- Claims at A Glance 2012Dokument28 SeitenClaims at A Glance 2012Kwalar KingNoch keine Bewertungen
- Simulation-Based Analysis of A Concrete Armour Units Manufacturing Plant For The Construction of A Rubble Mound BreakwaterDokument9 SeitenSimulation-Based Analysis of A Concrete Armour Units Manufacturing Plant For The Construction of A Rubble Mound BreakwaterABDELLAH IDMANSOURNoch keine Bewertungen
- RISO ReportDokument40 SeitenRISO ReportRafael Valotta RodriguesNoch keine Bewertungen
- Radiography L4Dokument61 SeitenRadiography L4MaxNoch keine Bewertungen