Beruflich Dokumente
Kultur Dokumente
Gps Based Cab Monitoring System
Hochgeladen von
lizhi0007Originalbeschreibung:
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Gps Based Cab Monitoring System
Hochgeladen von
lizhi0007Copyright:
Verfügbare Formate
GPS BASED CAB MONITORING SYSTEM
1. INTRODUCTION
In general, we have no correct mechanism to know the parameters like the route in which a cab (vehicle) has travelled, where was it at a particular instant of time, with what speed did it travel at that place and time and did it go to the desired place or not, we dont have a option rather than to believe the driver. The problem arises when the driver doesnt give us the exact authentic information. If we want a cab (vehicle) to go to certain place, via certain route, with certain speed within in certain time, later when we access the information about the journe , we have to simpl depend up on the driver for the information of the cab and the driver ma not give us the exact information about the journe and could use the cab (vehicle) for his personal use. The !"# $%#&' (%$ )*+IT*,I+! #-#T&) answers to all the problems raised above. .e can know the parameters like the distance travelled, time of the journe , speed of the cab (vehicle), route adopted b the driver with out being dependent on him. .e make use of a !"# modem, )ultimedia card, )icro controller and a wireless network (,/ transceiver) and "( where the map of the route is given through !oogle &arth. 'ata logging mechanism is used here the data logging is done from !"# receiver to the )ultimedia card b interfacing them with a micro controller. The stored data in the )ultimedia card is sent to the pc through wireless (,/ transceiver).The usage of wireless network ma increase the hardware complexit but avoids the usage of the cables which is an irritating task to connect when the data needed to be transmitted to the pc, which is used anal 0e the data graphicall , using a software called !oogle &arth map.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
2. PRINCIPLE OF OPERATION
The cab monitoring s stem deals with the speed, time, latitude and longitude of cab which is obtained from !"# receiver and storing the data in the memor card and transmit the data, in ))( to the "( with a wireless network, when ever we want to access the data. The objective of this project is achieved b the mechanism called data logging, is done from the !"# to the )ultimedia card. %s it involves the identification of the cab it re1uires a !lobal "rocessing # stem (!"#) to know the position of the cab. There are 23 satellites revolving around the earths orbit, at least 4 satellites are re1uired for the !"# receiver. .hen the !"# receiver is exposed to at least 4 satellites it receives the data from the satellites i.e. latitude, longitude, distance, speed, time, altitude. The receiver continuousl gives the data until it is switched off. % 5 6 external power suppl is given to the !"# receiver. The baud rate of the !"# receiver is 3788 bits9sec The data received is stored in the )ultimedia card. )ultimedia card is a device which stores the data up to certain space. The ))( which we use, in this project is 2 !$. .e have an option to format the ))( card. .henever the data is re1uired, it can be taken from the ))( and it is valid until we manuall delete or unless it is up to its full capacit then the new data is replaced b the old existing data. The !"# receiver is interfaced with the ))( b using a )icrocontroller ("I( :7/352). The 5 6 power suppl is needed for the micro controller. The micro controller in this project works in 2 modes, read and write, it reads the data from the !"# receiver and writes in to the ))(. The "I( microcontroller supports #"I protocol, which enables us to store the data in the ))(. The !"# receiver is interfaced with the )icrocontroller using a ,#;242 protocol. The data in the ))( is transferred to the "( using a wireless network i.e. ,/ transceiver. There are two ,/ transceivers, one is connected to "( and other is connected to )icrocontroller. The data is presented in the !oogle &arth map graphicall .
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
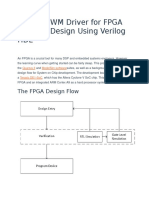
2.1 Block Diagram:
Fig 2.1 G.P.S Bas ! Ca" #o$i%ori$g S&s% m
The )ajor $uilding blocks of this "roject
!.".# receiver ))((multimedia card) )icrocontroller(:7f352) ,/ Transceiver "ower suppl )emor card interfacing ,.# 242
2.2 D scri'%io$:
2.2.1 PO(ER SUPPL):
The power suppl unit is used to provide a constant 56 suppl to different I(s this is a standard circuits using external :26'( adapter and fixed 4;pin voltage regulator. 'iode is added in series to avoid ,everse voltage. 2.2.2 #ICRO CONTROLLER:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
The "I( :7f352 ()*# /<%#=;based 7;bit microcontroller is upward compatible with the "I(:>(?4$9?3$9?>9??, "I(:>/7?497?397?>97??devices. It features 288 ns instruction execution, self programming, an I(', 2 (omparators, 7 channels of 7; bit %nalog;to;'igital (%9') converter, 2 capture9compare9".) functions, a s nchronous serial port that can be configured as either 4;wire #"I or 2;wire I2( bus, a @#%,T, and a "arallel #lave "ort. 2.2.* G.P.S: !"# is the onl full functional !+## in the world. !"# uses the constellation of between 23 and 42 )edium &arth *rbit satellites that transmit precise microwave sig; nals, which enable !"# receivers to determine their current location, the time, and their velocit . Its official name is +%6#T%, !"#.
2.2.+ #,l%i# !ia # mor& Car!:
The )ultimedia (ard ())() is a flash memor card standard. % memor card or flash memor card is solid;state electronic flash memor data storage device capable of storing digital contents. The ))( is the smallest removable flash memor designed specificall for digital applications, such as )"4 music pla ers, digital video cameras, mobile phones, voice recorder, video game consoles, and other electronics.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
*. PO(ER SUPPL)
"ower suppl
is the major concern
for ever
electronic device .#ince the
controller and other devices used are low power devices there is a need to step down the voltage and as well as rectif the output to convert the output to a constant dc
Fig *.1.Block Diagram o- Po. r s,''l&
*.1 Tra$s-orm r:
Transformer is a device used to increment or decrement the input voltage given as per the re1uirement. The transformers are classified into two t pes depending upon there functionalit #tep up transformer #tep down transformer
=ere we use a step down transformer for stepping down the house hold ac power suppl i.e. the 248;238v power suppl to 5 v ..e use a 5;8;5 v center tapped step down transformer.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
*.2 R c%i-i r:
The output of the transformer is an ac and should be rectified to a constant dc for this it is necessar to feed the output of the transformer to a rectifier. The rectifier is emplo ed to convert the alternating ac to a constant dc. There are man rectifiers available in the market some of them areA; =alf wave rectifier /ull wave rectifier $ridge rectifier If onl one diode is used then onl first half c cle is rectified and it is termed as half wave rectification and the rectifier used is termed as half wave rectifier. If two diodes are emplo ed in parallel then both positive and negative half c cles are rectified and this is full wave rectification and the rectifier is termed as /ull wave rectifier. If the diodes are arranged in the form of bridge then it is termed as $ridge rectifier/ it acts as a full wave rectifier. These rectifiers are available in the market in the form of integrated chips (I.(s)
The rectification is done b using one or more diodes connected in series or parallel.
*.* 0ol%ag R g,la%or:
The voltage regulator is used for the voltage regulation purpose. .e use I( ?785 voltage regulator. The I( number has a specific significance. The number ?7 represents the series while 85 represent the output voltage generated b the I(
*.+ Lig1% Emi%%i$g Dio! :
.e emplo a light emitting diode for testing the functionalit of the power suppl circuit. <&'s are also emplo ed in other areas for man purposes. The fallowing are the advantages of using <&'s. It helps us while troubleshooting the device i.e. when the device is malfunctioning it would be eas to detect where the actual problem araised <&' emplo ed with microcontroller verifies whether data is being transmitted
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
+. #ICROCONTROLLER 2PIC 13F+425
The "I( :7f352 ()*# /<%#=;based 7;bit microcontroller is upward compatible with the "I(:>(?4$9?3$9?>9??, "I(:>/7?497?397?>97??devices. It features 288 ns instruction execution, self programming, an I(', 2 (omparators, 7 channels of 7; bit %nalog;to;'igital (%9') converter, 2 capture9compare9".) functions, a s nchronous serial port that can be configured as either 4;wire #"I or 2;wire I2( bus, a @#%,T, and a "arallel #lave "ort.
+.1 F a%,r s:
*perating fre1uenc ;'(;38)=B "rogram memor ($ tes); 42C "rogram memor (instructions);:>473 'ata memor ($ tes);:54> 'ata &&",*) memor ($ tes); 25> I9* ports;"orts %,$,(,',& Timers;3 (apture9#erial communications D2 #erial communications, %ddressable @#%,T ,&#&T#(and dela s); "*,,$*,,,&#&T instruction, #tack full #tack @nderflow(",.T,*#T) Instruction set ;?5 instructions "ackages;33 "<((,38 pin 'ip,33 pin TE/"
+.1.1 S' cial F a%,r s:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
:88,888 erase9write c cle &nhanced /<%#= program memor t pical :,888,888 erase9write c cle 'ata &&",*) )emor /<%#=9'ata &&",*) ,etentionA F 38 ears #elf;reprogrammable under software control "ower;on ,eset ("*,), "ower;up Timer (".,T) and *scillator #tart;up Timer (*#T) .atchdog Timer (.'T) with its own *n;(hip ,( *scillator for reliable operation "rogrammable code protection "ower saving #<&&" mode #electable oscillator options including #ingle suppl 56 <ow power, high speed /<%#=9&&",*) technolog /ull static design .ide operating voltage range (2.86 to 5.56) Industrial and &xtended temperature ranges
+.2 D scri'%io$ o- #icroco$%roll r 2PIC 13-+425:
+.2.1 Clock 6 i$s%r,c%io$ c&cl : (lock is microcontrollerGs main starter, and is obtained from an
external component called an HoscillatorH. If we want to compare a microcontroller with a time clock, our HclockH would then be a ticking sound we hear from the time clock. In that case, oscillator could be compared to a spring that is wound so time clock can run. %lso, force used to wind the time clock can be compared to an electrical suppl . (lock from the oscillator enters a microcontroller via *#(: pin where internal circuit of a microcontroller divides the clock into four even clocks E:, E2, E4, and E3
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
which do not overlap. These four clocks make up one instruction c cle (also called machine c cle) during which one instruction is executed. &xecution of instruction starts b calling an instruction that is next in string. Instruction is called from program memor on ever E: and is written in instruction register on E3. 'ecoding and execution of instruction are done between the next E: and E3 c cles. *n the following diagram we can see the relationship between instruction c cle and clock of the oscillator (*#(:) as well as that of internal clocks E:;E3. "rogram counter ("() holds information about the address of the next instruction.
Fig +.1 Pi$ Diagram o- PIC #icroco$%roll r 13F+42
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
Pi$ : 2 4 3 5 > ? 7 J :8 :: :2 :4 :3 :5 :> :? :7 :J 28 2: 22 24 23 25 2> 2? 27 2J ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;
D scri'%io$ )(<,96"" ,%89%+8 ,%:9%+: ,%29%+296,&/; ,%49%+496,&/I ,%39T8(CI ,%59%+39##9<6'I+ ,&89,'9%+5 ,&:9.,9%+> ,&29(#9%+? 6'' 6## *#(:9(<CI+ *#(29(<C*9,%> ,(89T:*#*9T:(CI ,(:9T:*#I9(("2 ,(29((": ,(49#(C9#(< ,'89"#"8 ,':9"#": ,'29"#"2 ,'49"#"4 ,(39#'I9#'% ,(59#'* ,(>9TK9(C ,(?9,K9'T ,'39"#"3 ,'59"#"5 ,'>9"#">
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
48 4: 42 44 43 45 4> 4? 47 4J 38
; ; ; ; ; ; ; ; ; ; ;
,'?9"#"? 6## 6'' ,$89I+T8 ,$:9I+T: ,$29I+T2 ,$49(("2 ,$3 ,$59"!) ,$>9"!( ,$?9"!'
+.* Por%s:
Term HportH refers to a group of pins on a microcontroller which can be accessed simultaneousl , or on which we can set the desired combination of 0eros and ones, or read from them an existing status. "h sicall , port is a register inside a microcontroller which is connected b wires to the pins of a microcontroller. "orts represent ph sical connection of (entral "rocessing @nit with an outside world. )icrocontroller uses them in order to monitor or control other components or devices. 'ue to functionalit , some pins have twofold roles like "%39T*(CI for instance, which is in the same time the fourth bit of port % and an external input for free;run counter. #election of one of these two pin functions is done in one of the configuration registers. %n illustration of this is the fifth bit T8(# in *"TI*+ register. $ selecting one of the functions the other one is disabled. %ll port pins can be designated as input or output, according to the needs of a device thatGs being developed. In order to define a pin as input or output pin, the right combination of 0eros and ones must be written in T,I# register. If the appropriate bit of T,I# register contains logical H:H, then that pin is an input pin, and if the opposite is true, itGs an output pin. &ver port has its proper T,I# register. Thus, port % has T,I#%, and port $ has T,I#$. "in direction can be changed during the course of work which is particularl fitting for one;line communication where data flow constantl changes direction. "*,T% and "*,T$ state registers are located in bank 8, while T,I#% and T,I#$ pin direction registers are located in bank :.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
+.*.1 Por% a$! Tris: ,egister defines the corresponding port pin as input, and resetting a bit in T,I# register "*,T has adjoined 7 pins. The appropriate register for data direction is T,I#. #etting a bit in T,I# defines the corresponding port pin as output.
+.+ # mor& Orga$i7a%io$:
"I(:7/352 has two separate memor blocks, one for data and the other for the program. &&",*) memor with !", and #/, registers in ,%) memor make up data block, while /<%#= memor makes up the program block. A5 Program # mor&: "rogram memor has been carried out in /<%#= technolog which makes it the possible to program a microcontroller man times before itGs installed into a device and even after its installment if eventual changes in program or process parameters should occur. The si0e of program memor is:823 locations w.ith :3 bits width where locations 0ero and four are reserved for reset and interrupt vector.
B5 Da%a # mor&: 'ata memor consists of the &&",*) and ,%) memories. &&",*) memor consists of 25> eight bit locations whose content are not lost during loosing of power suppl . &&",*) is not directl addressable, but is accessed indirectl through &&%', and &&'%T% registers. %s &&",*) memor usuall serves for storing important parameters (for example, of a given temperature in temperature regulators), there is a strict procedure for writing in &&",*) which must be followed in order to avoid accidental writing. ,%) memor for data occupies space on a memor map from location 8x8( to 8x3/ which comes to >7 locations. <ocations of ,%) memor are also called !", registers which is an abbreviation for General Purpose Registers. !", registers can be accessed regardless of which bank is selected at the moment.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
+.4 # mor& Ba$ks:
$eside this GlengthG division to the #/, and the !", registers, memor map is also divided in GwidthG (see preceding map) to two areas called GbanksG. #electing one of the banks is done through the ,"8 bit in the #T%T@# register.
+.8 Program Co,$% r:
"rogram counter is a :4;bit register that contains the address of the instruction being executed. It is ph sicall carried out as a combination of a 5;bit register "(<%T= for the five higher bits of the address, and the 7;bit register "(< for the lower 7 bits.
+.9 S%ack:
"I(:7/352 has a :4;bit stack with 7 levels, or in other words, a group of 7 memor locations, :4 bits wide, with special purpose. Its basic role is to keep the value of program counter after a jump from the main program to an address of a subprogram. In order for a program to know how to go back to the point where it started from, it has to return the value of a program counter from a stack.
+.3 I$% rr,'%s:
Interrupts are a mechanism of a microcontroller which enables it to respond to some events at the moment the occur, regardless of what microcontroller is doing at the time. This is a ver important part, because it provides connection between a microcontroller and environment which surrounds it. !enerall , each interrupt changes the program flow, interrupts it and after executing an interrupt subprogram (interrupt routine) it continues from that same point on. (ontrol register of an interrupt is called I+T(*+ and can be accessed regardless of the bank selected. Its role is to allow or disallowed interrupts, and in case the are not allowed, it registers single interrupt re1uests through its own bits.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
A5 IE 2I$% rr,'% E$a"l 5: % single microcontroller can serve several devices. In the interrupt method, whenever an device needs its service, the device notifies the microcontroller b sending it can interrupt signal. . The program associated with the interrupt is called the interrupt service routine (I#,). The advantageous of interrupts is that the microcontroller can serve man devices based on the priorit assigned to it. There are six interrupts in the micro controller :. ,eset. 2. Two interrupts are set aside for the timers. 4. Two interrupts are set aside for hardware external hardware interrupts. 3. #erial (ommunications has a single interrupt (receive and transfer). .
Fig +.2 Forma% o- I$% rr,'% E$a"l 2IE5 &% disable all interrupts. If &% L 8, now interrupt is acknowledged. If &% L :, each interrupt source is individuall enable a lap bit. ;;;; &T2 &# &T: &K: &T8 &K8 +ot implemented, reserved for future use. enables or disables timer 2 overflow or capturer interrupt. enables or disables the serial port interrupt. enables or disables timer : overflow interrupt. enables or disables external interrupt :. enables or disables timer 8 overflow interrupt. enables or disables external interrupt 8. enabled or disabled b setting or clearing its
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
B5 IP 2I$% rr,'% Priori%&5: The Interrupt "riorit #/, is used to specif the relative priorit of each
interrupt. *n the 785:, an interrupt ma either be of low (8) priorit or high (:) priorit . %n interrupt ma onl interrupt interrupts of lower priorit .
Fig +.* Forma% o- I$% rr,'% Priori%& 2IP5 ;;; ;;; I".? ,eserved I".> ,eserved
"T2 I".5 Timer2 Interrupt "riorit bit (for 7852 onl ) "# I".3 #erial "ort Interrupt "riorit $it "T8 I".: Timer8 Interrupt "riorit $it "K8 I".8 &xternal Interrupt "riorit $it
+.: PS( 2Program S%a%,s (or!5:
The "rogram #tatus .ord is used to store a number of important bits that are set and cleared b microcontroller instructions.
. Fig +.+ Forma% o- Program S%a%,s (or! 2PS(5 (%( ;;;; ,#: *6 ;;;; (arr ;flag. %uxiliar carr ;flag. %vailable to the user for general;purpose. register bank selector bit :. overflow flag. @ser definable bit.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
"
"arit flag. It is used in the error detection b adding a bit.
+.1; TI#ERS:
The HtimerM or Hcounter Hfunction is selected b control bits (9T in the special function register T)*'. These two timer9counters have for operating modes, which are selected b bit;pairs ():9)8) in T)*'. )odes 8, :, and 2 are the same for both timers9counters. )ode 4 is different. These two #/,s, taken together, represent timer 8. Their exact behavior depends on how the timer is configured in the T)*' #/,N however, these timers alwa s count up. .hat is configurable is how and when the increment in value.
Fig +.4 Forma% o- Tim r #o! R gis% r 2T#OD5 GATEA C6TA .hen set, start and stop of timer b hardware .hen reset, start and stop of timer b software (leared for timer operation #et for counter operation Ta"l +.1 #o! s o- T#OD #1 8 8 : : #; 8 : 8 : #ODE 8 : 2 4 OPERATING #ODE :4;bit timer mode :>;bit timer mode 7;bit auto reload mode #plit timer mode
+.1;.1 Tim r 1:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
These two #/,s, taken together, represent timer :. Their exact behavior depends on how the timer is configured in the T)*' #/,N however, these timers alwa s count up. .hat is configurable is how and when the increment in value. %ddress L77=. $it addressable.
Fig +.8 Forma% o- Tim r Co$%rol R gis% r 2TCON5 T/A Timer overflow flagA #et b hardware when the timer9counter overflows. It is cleared b hardware, as the processor vectors to the interrupt service routine. T,A I&A ITA timer run control bitA #et or cleared b software to turn timer or counter on9off. set b ("@ when the external interrupt edge (=;to;< transition) is detected. It is cleared b ("@ when the interrupt is processed. set9cleared b interrupt. +.1;.2 Fr <r,$ %im r T#R;: It is an 7;bit register inside a microcontroller that works independentl of the program. *n ever fourth clock of the oscillator it increments its value until it reaches the maximum (255), and then it starts counting over again from 0ero. %s we know the exact timing between each two increments of the timer contents, timer can be used for measuring time which is ver useful with some devices. software to specif falling edge9low;level triggered external
+.1;.* T#OD 2Tim r #o! 5:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
The Timer )ode #/, is used to configure the mode of operation of each of the two timers. @sing this #/, our program ma configure each timer to be a :>;bit timer, an 7;bit auto reload timer, a :4;bit timer, or two separate timers. %dditionall , ou ma configure the timers to onl count when an external pin is activated or to count HeventsH that are indicated on an external pin.
+.11 SCON 2S rial Co$%rol5:
The #erial (ontrol #/, is used to configure the behavior of the 785:Gs on;board serial port. This #/, controls the baud rate of the serial port, whether the serial port is activated to receive data, and also contains flags that are set when a b te is successfull sent or received. $it addressable.
7= Fig +.9 Forma% o- S rial Co$%rol R gis% r 2SCON5 ,&+ set or cleared b software to enable or disable reception.
T$ 7 not widel used. ,$ 7 not widel used. TI ,I transmits interrupt flag. #et b hardware at the beginning of the stop bit in mode :. It must be cleared b software. received interrupts flag. #et b hardware halfwa through the stop bit time in mode :. It must be cleared b software.
Ta"l +.2 #o! s o- SCON
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
S#; 8 8 : :
S#1 8 : 8 :
#o! O- O' ra%io$ # nchronous mode 7;bit data, : start bit, : stop bit, variable baud rate J; bit data, : start bit, : stop bit, fixed baud rate J; bit data, : start bit, : stop bit, variable baud rate
+.12 A''lica%io$s:
"I(:7/352 perfectl fits man uses, from automotive industries and controlling home appliances to industrial instruments, remote sensors, electrical door locks and safet devices. It is also ideal for smart cards as well as for batter supplied devices because of its low consumption. &&",*) memor makes it easier to appl microcontrollers to devices where permanent storage of various parameters is needed (codes for transmitters, motor speed, receiver fre1uencies, etc.). <ow cost, low consumption, eas handling and flexibilit make "I(:7/352 applicable even in areas where microcontrollers had not previousl been considered (exampleA timer functions, interface replacement in larger s stems, coprocessor applications, etc.). In # stem "rogrammabilit of this chip (along with using onl two pins in data transfer) makes possible the flexibilit of a product, after assembling and testing have been completed. This capabilit can be used to create assembl ;line production, to store calibration data available onl after final testing, or it can be used to improve programs on finished products.
4. GLOBAL POSITIONING S)STE#
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
4.1 I$%ro!,c%io$:
The !lobal "ositioning # stem (!"#) is a burgeoning technolog , which provides une1ualled accurac and flexibilit of positioning for navigation, surve ing and !I# data capture. The !"# +%6#T%, (+avigation #atellite timing and ,anging !lobal "ositioning # stem) is a satellite;based navigation, timing and positioning s stem. The !"# provides continuous three;dimensional positioning 23 hrs a da throughout the world. The technolog seems to be beneficiar to the !"# user communit in terms of obtaining accurate data up to about:88 meters for navigation, meter;level for mapping, and down to millimeter level for geodetic positioning. The !"# technolog tremendous amount of applications in !I# data collection, surve ing, and mapping. The !lobal "ositioning # stem (!"#) is a @.#. space;based radio navigation s stem that provides reliable positioning, navigation, and timing services to civilian users on a continuous worldwide basis ;; freel available to all. /or an one with a !"# receiver, the s stem will provide location with time. !"# provides accurate location and time information for an unlimited number of people in all weather, da an where in the world. The !lobal "ositioning # stem (!"#) is a satellite;based navigation s stem made up of a network of 23 satellites placed into orbit b the @.#. 'epartment of 'efense. !"# was originall intended for militar applications, but in the :J78s, the government made the s stem available for civilian use. !"# works in an weather conditions, an where in the world, 23 hours a da . There are no subscription fees or setup charges to use !"#. The !"# is made up of three partsA satellites orbiting the &arthN control and monitoring stations on &arthN and the !"# receivers owned b users. !"# satellites broadcast signals from space that are picked up and identified b !"# receivers. &ach !"# receiver then provides three;dimensional location (latitude, longitude, and altitude) plus the time. and night, has
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
4.2 G o 'osi%io$i$g << Basic Co$c '%s:
$ positioning we can understand the determination of stationar or moving objects. These can be determined as followsA :. In relation to a well;defined coordinate s stem, usuall b three coordinate values and 2. In relation to other point, taking one point as the origin of a local coordinate s stem. The first mode of positioning is known as point positioning, the second as relative positioning. If the object to be positioned is stationar , we can term it as static positioning. .hen the object is moving, we call it kinematics positioning. @suall , the static positioning is used in surve ing and the kinematics position in navigation.
4.2.1 GPS Basic Fac%s: The !"# uses satellites and computers to compute positions an where on earth. The !"# is based on satellite ranging. That means the position on the earth is determined b measuring the distance from a group of satellites in space. The basic principles behind !"# are reall simple, even though the s stem emplo s some of the high;techest e1uipment ever developed. In order to understand !"# basics, the s stem can be categori0ed into 5 <ogical steps. The are listed belowA 1. Triangulation from the satellite is the basis of the s stem. 2. To triangulate, the !"# measures the distance using the travel time of the radio message. *. To measure travel time, the !"# need a ver accurate clock. +. *nce the distance to a satellite is known, then we need to know where the satellite is in space.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
4. %s the !"# signal travels through the ionosphere and the earthGs atmosphere, the signal is dela ed. 8. To compute a position in the three dimensions, we need to have four satellite measurements. The !"# uses a trigonometric approach to calculate the positions, The !"# satellites are so high up that their orbits are ver predictable and each of the satellites is e1uipped with a ver accurate atomic clock. 4.* Com'o$ $%s o- a GPS: The !"# is divided into three major components
Fig 4.1 !i-- r $% com'o$ $%s o- GPS A5 T1 Co$%rol S gm $%:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
The '*' monitoring stations track all !"# signals for use in controlling the satellites and predicting their orbits. )eteorological data also are collected at the monitoring stations, permitting the most accurate evaluation of tropospheric dela s of !"# signals. #atellite tracking data from the monitoring stations are transmitted to the master control station for processing. This processing involves the computation of satellite ephemerides and satellite clock corrections. The master station controls orbital corrections, when an satellite stra s too far from its assigned position, and necessar repositioning to compensate for unhealth (not full functioning) satellites. B5 T1 S'ac S gm $%: The #pace #egment consists of the (onstellation of +%6%#T%, earth orbiting satellites. The current 'efense 'epartment plan calls for a full constellation of 23 $lock II satellites (2: operational and 4 in;orbit spares). The satellites are arra ed in > orbital planes, inclined 55 degrees to the e1uator. The orbit at altitudes of about :2888, miles each, with orbital periods of :2 sidereal hours (i.e., determined b or from the stars), or approximatel one half of the earthGs periods, approximatel :2 hours of 4;' position fixes. The next block of satellites is called $lock II,, and the will provide improved reliabilit and have a capacit of ranging between satellites, which will increase the orbital accurac . &ach satellite contains four precise atomic clocks (,ubidium and (esium standards) and has a microprocessor on board for limited self;monitoring and data processing. The satellites are e1uipped with thrusters which can be used to maintain or modif their orbits. . C5 T1 Us r S gm $%: The user segment is a total user and supplier communit , both civilian and militar . The @ser #egment consists of all earth;based !"# receivers. ,eceivers var greatl in si0e and complexit , though the basic design is rather simple. The t pical receiver is composed of an antenna and preamplifier, radio signal microprocessor, control and displa device, data recording unit, and power suppl . The !"# receiver decodes the
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
timing signals from the GvisibleG satellites (four or more) and, having calculated their distances, computes its own latitude, longitude, elevation, and time. This is a continuous process and generall the position is updated on a second;b ;second basis, output to the receiver displa device and, if the receiver displa device and, if the receiver provides data capture capabilities, stored b the receiver;logging unit.
4.+ =o. i% .orks:
!"# satellites circle the earth twice a da in a ver precise orbit and transmit signal information to earth. !"# receivers take this information and use triangulation to calculate the userGs exact location. &ssentiall , the !"# receiver compares the time a signal was transmitted b a satellite with the time it was received. The time difference tells the !"# receiver how far awa the satellite is. +ow, with distance measurements from a few more satellites, the receiver can determine the userGs position and displa it on the unitGs electronic map. !"# receiver must be locked on to the signal of at least three satellites to calculate a 2' position (latitude and longitude) and track movement. .ith four or more satellites in view, the receiver can determine the userGs 4' position (latitude, longitude and altitude). *nce the userGs position has been determined, the !"# unit can calculate other information, such as speed, bearing, track, trip distance, distance to destination, sunrise and sunset time and more.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
Fig 4.2 G.P.S r c i> r comm,$ica%i$g .i%1 %1 sa% lli% a$! s $!i$g i$-orma%io$ %1ro,g1 %1 .ir l ss mo"il '1o$ 5.5 GPS Ra!io Sig$als: !"# satellites transmit two t pes of radio signalsA (9%;code and ";code. $riefl , here are the uses and differences of these two t pes of signals. A5 Coars Ac?,isi%io$ 2C6A<co! 5: (oarse %c1uisition ((9%;code) is the t pe of signal that consumer !"# units receive. (9%;code is sent on the <: band at a fre1uenc of :5?5.32 )=0 (9% broadcasts are known as the #tandard "ositioning #ervice (#"#). (9%;code is less accurate than "; code. The advantage of (9%;code is that its 1uicker to use for ac1uiring satellites and getting an initial position fix. #ome militar ";code receivers first track on the (9%;code and then switch over to ";code.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
B5 Pr cisio$ 2P<co! 5: ";code provides highl precise location information. ";code is difficult to jam and spoof. The @.#. militar is the primar user of ";code transmissions, and it uses an encr pted form of the data (-;code) so onl special receivers can access the information. The ";code signal is broadcast on the <2 band at :22?.> )=0 ";code broadcasts are known as the "recise "ositioning #ervice (""#).
4.8 So,rc s o- GPS Sig$al Errors:
/actors that can degrade the !"# signal and thus affect accurac include the followingA
Ionosphere and troposphere dela s O the satellite signal slows as it passes through the atmosphere. The !"# s stem uses a built;in model that calculates an average amount of dela to partiall correct for this t pe of error.
#ignal multipath O this occurs when the !"# signal is reflected off objects such as tall buildings or large rock surfaces before it reaches the receiver. This increases the travel time of the signal, thereb causing errors.
,eceiver clock errors O a receiverGs built;in clock is not as accurate as the atomic clocks onboard the !"# satellites. Therefore, it ma have ver slight timing errors.
+umber of satellites visible O the more satellites a !"# receiver can Hsee,H the better the accurac . $uildings, terrain, electronic interference, or sometimes even dense foliage can block signal reception, causing position errors or possibl no position reading at all. !"# units t picall will not work indoors, underwater or underground.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
Fig 4.* GPS mo! m ! >ic
4.9 F a%,r s:
<ow cost (ompact (?3x?3x:Jmm) :2 (hannel ,eceiver $uilt;in %ntenna #tandard +)&% protocol @#$ or #erial
4.3 R c i> r %&' s:
A5 #a''i$g6r so,rc mo! ls: These portable receivers collect location points and line and area data that can be input into a !eographic Information # stem (!I#). The are more precise than consumer models, can store more data, and are much more expensive.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
B5 S,r> & mo! ls: These are used mostl for surve ing land, where ou ma need accurac down to the centimeter for legal or practical purposes. These units are extremel precise and store a large amount of data. The tend to be large, complex to use, and ver expensive. C5 Comm rcial %ra$s'or%a%io$ mo! ls: These !"# receivers, not designed to be handheld, are installed in aircraft, ships, boats, trucks, and cars. The provide navigation information appropriate to the mode of transportation. These receivers ma be part of an %utomated "osition ,eporting # stem (%",#) that sends the vehicles location to a monitoring facilit
4.: I$-orma%io$ -rom GPS R c i> rs:
!"# receivers provide our location and other useful informationA a. Time: % !"# receiver receives time information from atomic clocks, so its much more accurate than our wristwatch. b. <ocation: !"# provides coordinate) <ongitude ( coordinate) and &levation. c. #peed: .hen we are moving, a !"# receiver displa s our speed. d. 'irection of travel: % !"# receiver can displa our direction of travel if we are moving. If we are stationar , the unit cant use satellite signals to determine which direction we are facing. e. #tored locations: we can store locations where weve been or want to go with a !"# receiver. These location positions are wa points. .a points are important because a !"# unit can suppl us with directions and information on how to get to a wa point. % collection of wa points that plots a course of travel is a route, our location in three dimensions. <atitude (x
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
which can also be stored. !"# receivers also store tracks (which are like an electronic collection of breadcrumb trails that show where were been). f. (umulative data: % !"# receiver can also keep track of information such as the total distance traveled, average speed, maximum speed, minimum speed, elapsed time, and time to arrival at a specified location.
4.1; GPS Posi%io$i$g T&' s:
There are two t pes of !"# positioning s stem A5 A"sol,% 'osi%io$i$g: The mode of positioning relies upon a single receiver station. It is also referred to as Gstand;aloneG !"#, because, unlike differential positioning, ranging is carried out strictl between the satellite and the receiver station, not on a ground;based reference station that assists with the computation of error corrections. %s a result, the positions derived in absolute mode are subject to the unmitigated errors inherent in satellite positioning. *verall accurac of absolute positioning is considered to be no greater than 58 meters at best b %ckro d and <orimer and to be I :88 meter accurac b the @.#. B5 Di-- r $%ial Posi%io$i$g: ,elative or 'ifferential !"# carries the triangulation principles one step further, with a second receiver at a known reference point. To further facilitate determination of a pointGs position, relative to the known earth surface point, this configuration demands collection of an error;correcting message from the reference receiver. 'ifferential;mode positioning relies upon an established control point. The reference station is placed on the control point, a triangulated position, the control point coordinate. This allows for a correction factor to be calculated and applied to other roving !"# units
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
used in the same area and in the same time series. This error correction allows for a considerable amount of error of error to be negated, potentiall as much as J8 percent.
Fig 4.+ GPS s %,'
4.11 T.o Commo$ So,rc s o- #or Acc,ra% Loca%io$ Da%a:
'ifferential !"# ('!"#) .ide %rea %ugmentation # stem (.%%#) #urve ing and other work that demands a high level of precision use 'ifferential !"# ('!"#) to increase the position accurac of a !"# receiver. % stationar receiver measures !"# timing errors and broadcasts correction information to other !"# units that are capable of receiving the '!"# signals. (onsumer !"# receivers that support '!"# re1uire a separate beacon receiver that connects to the !"# unit. (onsumers can receive '!"# signals from free or commercial sources.
A5 Di-- r $%ial GPS:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
B5 (AAS: .ide %rea %ugmentation # stem (.%%#) combines satellites and ground stations for position accurac of better than three meters. 6ertical accurac is also improved to three to seven meters. .%%# is onl available in +orth %merica. *ther governments are establishing similar s stems that use the same format radio signals such as &uropean &uro !eostationar +avigation *verla #ervice (&!+*#) Papanese )ulti;/unctional #atellite %ugmentation # stem ()#%#)
4.12 GPS Acc,rac&:
Ta"l 4.1 ! scri"i$g o- GPS acc,rac&: GPS #o! !"# without #% !"# with '!"# !"# with .%%# Dis%a$c i$ F % 3J :8D:> :8 Dis%a$c i$ # % rs :5 4D5 4
4.1* N ! o- R - r $c S%a%io$:
/or an level, except autonomous (which can have a large amount of error in it), we must have a reference receiver, which is stationar , and a rover. The coordinates of this station must be known before we can begin using !"# on an of our machines. /irst a proper site for the reference station is to be selected, and then a !"# surve is performed to obtain the known coordinates. *nce it is installed, the !"# reference station can perform two functions simultaneousl .
,eceive data from the satellites $roadcast !"# data to the rovers in the mine
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
4.1*.1 S l c%i$g %1 R - r $c S%a%io$:
"roximit to our .orking %reasA This is both a !"# issue and a radio issue. ,emember, ,TC is generall limited to about :8;:5 Cm (>;J miles). %bsence of ,/ InterferenceA Tr to place the reference station awa from sources of radio interference, which arise from radio towers, transmitters, television )inimal #ources of )ultipathA )ultipath at our reference site can cause inaccurate answers or interfere with our roverGs abilit to initiali0e. (ontinuous %( 9 '( "ower #ource #table 'ocumentationA *ne should have a stable surve similarl well;defined ph sical point at the reference station monument or other
#table %ntennae )ount +ot onl the monument should be stable, but also the !"# antennae itself should be secure and stable to minimi0e the movement.
4.1*.2 R - r $c S%a%io$ E?,i'm $%A
!"# receiver !"# antenna ,adio and antenna, "ower suppl , Q (ables
15 Ra!ios: .e have seen that each !"# rover must receive information from the reference station to achieve accurate positions. To maintain constant communication between our reference station and rover, we need
,adio ,adio %ntenna (ables The radios are cabled directl into the !"# receiver. "ower ma be provided to
the radio through the !"# receiver. %t the reference site, the !"# data is broadcast
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
through the radio. %t the rover site, the reference !"# data is received b the radio and are routed into the rover receiver, where it is processed together with roverGs the !"# data.
25 R ' a% r Ra!ios: If, for an reason, the reference station transmission cannot reach our rovers, then we must use one or more repeaters. % repeater rela s the data from our reference or another repeater. The maximum number of repeaters we can use depends on our t pe of radio. ,epeaters differ from our reference and rover radios in two important wa sA the must have their own source of power, and the can be moved as the needs change. ,adios draw ver low power, but the re1uire uninterrupted power. $ecause repeaters ma need to be moved to accommodate our needs, batteries or compact solar power units are used.
/re1uenc
and $andwidthA )ost radios used in !"# fall within one of the
following fre1uenc rangesA
:58;:?3 )=0 (6=/) 38>;5:2 )=0 (@=/) J82;J27 )=0 (spread spectrum) The lower;fre1uenc radios (:58;:?3 )=B) tend to have more power, due to
design and legal issues (not "h sics), =owever, the bandwidth, which determines the amount of data we can transmit, is narrower in these lower ranges (also due to design, not ph sics). In the nominal 358 )=0 and J88 )=0 ranges, the bandwidth is wider. *5 Ra!io Ra$g : To guarantee stead , uninterrupted transmission over the radio, one should be aware of some of the factors that affect the radioGs effective range.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
%ntenna =eightA raising the radio antenna is the easiest and most effective wa to increase range. %ntenna designA radiating patterns var , depending on the antenna design. (able length and t peA radio signals suffer loss in cables, so keep the length to a minimum. If we must use long cables, use low;loss cables. *utput powerA doubling output power does not double our effective range. *bstructionsA $uildings, walls and even the machines can block or interrupt radio transmission. !roundingA The radio antenna ma be a target for lightning.
4.1+ GPS =as I$% r$al A$! E@% r$al # mori s:
4.1+.1 I$% r$al # mor&: % receivers internal memor holds such data as wa points, track logs, routes, and up loadable digital maps (if the model supports them). The more memor the receiver has, the more data we can store in it. %ll the data thats been stored in the !"# receiver is retained when the device is turned off.!"# receivers have different amounts of memor . @nlike personal computers, we cant add memor chips to a !"# unit to expand its internal memor . 4.1+.2 E@% r$al S%orag : #ome !"# receivers arent limited to internal memor for storage, using support memor cards that can be plugged into the receiver to store data. &xternal memor can be either )anufacturer proprietar data cards or !eneric (and less expensive) storage, such as )ulti )edia (ard ())() #ecure 'igital (#')
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
4.14 N#EA Forma%:
!"# gives the output in +)&% format which means national marine electronics association. This !"# output contains six to seven lines of data out of that onl two lines are sufficient for us to trace the complete path journe of an vehicle or moving objects. Those two lines are !"!!% which gives time, position and fix t pe data and !",)( (,ecommended minimum sentence) which gives time, date, position, course and speed data. GPGGA: R!"!!%,:>:22J.37?,4?24.23?5,+,:2:57.43:>,&,:,8?,:.8,J.8,), , , ,8888S:7 GPR#CA R!",)(,:>:22J.37?,%,4?24.23?5,+,:2:57.43:>,&,8.:4,48J.>2,:285J7, ,S:8
+)&% output messages areA *ption GGA R#C 'escription Time, position and fix t pe data Time, data, position, course and speed data
In this format ever line starts with R s mbol and ends with S indicating starting and ending of lines, after this :>:22J indicates the time at that instant :>hrs :2min 2J sec, next latitude of 4? degrees 24.23?5 +, longitude of :2: degrees 57.43:>&. T% indicates the active data.S:7 indicate the checksum data. $ using longitudes and latitudes we can locate the position of a particular location. This +)&% format is converted using ccs compiler and opened on !oogle &arth computeri0ed map then we have the complete path journe of an vehicle or moving objects.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
4.18 GPR#C Da%a Forma%A
,)( (,ecommended )inimum +avigation Information)A
1 A
2* A A
+ 4 A A
8 9 A A
3 A
: A
1; 11 12 A A A
B<<R#C/11mmss.ss/A/llll.ll/a/&&&&&.&&/a/@.@/@.@/@@@@/@.@/aC11
: Time (@T() 2 #tatus, 6 L +avigation receiver warning 4 <atitude 3 + or # 5 <ongitude > & or . ? #peed over ground, knots 7 Track made good, degrees true J 'ate, dd;mm; :8 )agnetic 6ariation, degrees :: & or . :2 (hecksum
4.19 GPS A''lica%io$s:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
*ne of most significant and uni1ue features of the !lobal "ositioning # stems is the fact that the positioning signal is available to users in an position worldwide at an time. .ith a full operational !"# s stem, it can be generated to a large communit of likel to grow as there are multiple applications, ranging from surve ing, mapping,and navigation to !I# data capture.!"# will soon be a part of the overall utilit oftechnolog . There are countless !"s applications, a few important ones are covered in the following passage. Sci $c : %rchaeolog &nvironmental
Tra$s'or%a%io$: %viation #pace
#ili%ar&: Intelligence and Target <ocation +avigation .eapon aiming and !uidance
I$!,s%r&: )apping "ublic safet #urve ing Telecommunications
8. #ULTI#EDIA CARD
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
8.1 I$%ro!,c%io$:
The )ultimedia (ard ())() is a flash memor card standard. % memor card or flash memor card is solid;state electronic flash memor data storage device capable of storing digital contents. The ))( is the smallest removable flash memor designed specificall for
digital applications, such as )"4 music pla ers, digital video cameras, mobile phones, voice recorder, video game consoles, and other electronics. The )ulti )edia (ard has a wide variet of uses in some of the most exciting products on the market toda . % ))( is used as storage media for a portable device, in a form that can easil be removed for access b a "(. /or example, a digital camera would use an ))( for storing image files. ))(s are currentl available in si0es up to and including 42 !$. The are used in almost ever context in which memor cards are used, like cellular phones, digital audio pla ers and digital cameras. #ince the introduction of #ecure 'igital card few companies build ))( slots into their devices (an exception is some mobile devices like the +okia J488 communicator, where the smaller si0e of the ))( is a benefit), but the slightl thinner, pin;compatible ))(s can be used in almost an device that supports #' cards if the software9firmware on the devices support them.
8.2T&' s o- ##C:
A5 A$ RS<##C .i%1 a!a'% r: The ,#;))( card is approximatel half the si0e of the full )ultimedia (ard. =aving the same width and thicknessN ,#;))( measures :7mm from top to bottom instead of 42mm. .ith capacities of :!$ as of 2885, ,#;))( cards can be pushed into an adapter and plugged into full;si0e ))( slots.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
B5 D,al<0ol%ag #,l%im !ia Car! 2D0<##C5: *ne of the first substantial changes in ))( was the introduction of dual;voltage cards that support operations at :.7 6 in addition to 4.4 6. ,unning at lower voltages reduces the cardGs power consumption, which is important in mobile devices. =owever, simple dual;voltage parts 1uickl went out of production in favor of ))( plus and ))( mobile, which offer additional capabilities on top of dual;voltage support. C5 ##C micro: ))( micro is a micro;si0e version of ))(. .ith dimensions of :3 mm U :2 mm U :.: mm, it is even smaller and thinner than ,#;))(. <ike ))( mobile, ))( micro supports dual voltage, is backward compatible with ))(, and can be used in full;si0e ))( and #' slots with a mechanical adapter. ))( micro cards support the high;speed and 3 bit bus features of the 3.x spec, but not the 7;bit bus, due to the absence of the extra pins. %n ))( micro card appears ver similar to micro #' but the two formats are not ph sicall compatible and have incompatible pin outs.
8.* D sig$ a$! Im'l m $%a%io$:
#' cards are based on the older )ultimedia (ard ())() format, but have a number of differencesA The #' card is as mmetricall shaped in order not to be inserted upside down, while an ))( would go in most of the wa but not make contact if inverted.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
Fig 8.1 SD car!/ mi$i SD car!/ a$! micro SD car! -rom %o' %o "o%%om.
)ost #' cards are ph sicall thicker than ))(s. #' cards generall measure 42 mm U 23 mm U 2.: mm, but as with ))(s can be as thin as :.3 mm if the lack a write;protect switchN such cards, called HThin #'H, are described in the #' specification, but the are non;existent or rare in the market as devices that would re1uire a thinner card are usuall utili0ing the smaller (and thinner) versions of #'A mini#' or micro#'. The cardGs electrical contacts are recessed beneath the surface of the card, protecting them from contact with a userGs fingers. #' cards t picall have transfer rates in the range of :8;28 )$9s, but this number is subject to change, due to recent improvements to the ))( standard.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
'evices with #' slots can use the thinner ))(s, but standard #' cards will not fit into the thinner ))( slots. )ini#' cards can be used directl in #' slots with a simple passive adapter, since the cards differ in si0e and shape but not electrical interface. .ith an active electronic adapter, #' cards can be used in (ompact /lash or "( card slots. #ome #' cards include a @#$ connector for compatibilit with desktop and laptop computers, and card readers allow #' cards to be accessed via connectivit ports such as @#$, /ire.ire, and the parallel printer port. #' cards can also be accessed via a flopp disk drive with a /lash "ath adapter
8.+ (orki$g o- ##C:
))( ()ulti )edia (ard) is a device which can be used to store the data within it in the form of files. ))( card can be interfaced with )icrocontroller using #"I (#erial "eripheral Interface) protocol. .e are using this ))( card to store the logged !"# data. The logged !"# data can be copied onto a computer and then can be displa ed on !oogle &arth computeri0ed map .e are using >3)$ ))( card.
8.4 SD6##C #i$i Boar!:
*ur new #'9))( )ini $oard is a great wa to interface to a standard #' or ))( memor card. This board features a standard #'9))( connector for eas connection of our memor card. 'ata can be easil downloaded or read from the card using standard #' or #"I communication.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
Fig 8.2 #i$i "oar! o- ##C
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
This board incorporates standard TT< connectors for eas connection. % (ard 'etect signal and <&', together with a ,ed "ower <&'. The connector is a high;1ualit %6K card connector, for reliable and long;life performance. This board can be easil configured to work with our )"4 )ini;$oard, as a simple )"4 "la er. Ideal also as a data storage board for real;time data and program storage. The new #'9))( )ini $oard is ideal for a wide range of data storage and programming applications. The board connects easil using a standard #"I interface and programs can be 1uickl developed to utili0e standard memor cards.
8.8 F a%,r s o- #i$i Boar!:
It can be used with #' and ))( (ards. =igh;Eualit %6K (ard #ocket. <&' Indication for (ard "resence. #tandard (ommunications interfaces for 'ata ,ead and .rite. &asil (onnects to most microcontrollers. Ideal for use as an easil removable 'ata;#torage 'evice. $oard 'imensionsA 35 x 55 mm.
8.9 F a%,r s o- ##C:
@niversal low cost data storage and communication media. The ))( communication is based on ? pin serial bus *perate in a low voltage range of 2.8 to 4.>6 Targeted for portable and stationar applications +oted for high date rate of 52)bps #ecure 6ersions of card is available. ))( uses flash memor application for read9write application or ,*) chip for static
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
8.3 S c,r 0 rsio$s:
Two secure versions of the )ultimedia (ard are offered. #ecure ))( for (ontent "rotection is used for cop righted material. It contains encr pted content in readable flash memor and licensing information in a hardware;protected, tamper proof part of the card. #ecure ))( for );(ommerce is a high;level securit card for e; commerce.
8.: ##C a$! SD Car!s:
)ultimedia (ards and #' )emor (ards share the same footprint, but ))(s are thinner and have onl seven pins compared to nine. ))( cards can be read in #' (ard readers, but #' (ards cannot be read in readers designed for ))( onl .
Fig 8.* #,l%im !ia car!
8.1; A!>a$%ag sA
@niversal low cost data storage and communication media. =igh performance at a low cost price. <ow power consumption. =igh data through at a memor card interface.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
))( (ommunication is based on an advanced ?;pin serial bus designed to operate in a low voltage range. ,educed;#i0e )ultimedia (ard (,#;))()A
8.11 A''lica%io$s o- ##C: :) It is used for digital applications such as )"4 music pla ers, digital video cameras,
mobile phones, voice recorders. 2) The ,#;))( is aimed primaril at mobile phone and digital camera
9. SERIAL AND (IRELESS CO##UNICATION
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
9.1 S rial Comm,$ica%io$:
#erial communication is used for transferring data between two s stems located at distances of hundreds of feet to millions of miles apart. #erial data communication uses two methods, a s nchronous and as nchronous. The s nchronous method transfers a block of data at a time while the s nchronous transfers a single b te at a time. /or this reason, there are special I( chips made b man manufacturers for serial data communications. These chips are commonl referred to as @%,T and @#%,T.
9.1.1 AS)NC=RONOUS SERIAL CO##UNICATION:
In the as nchronous method, each character is placed in between start and stop bits. This is the called framing. In data framing for as nchronous communications, the data, such as %#(II characters, are packed in between a start bit and a stop bits. The start bit is alwa s one;bit but the stop bit can be one or two bits. If the transmitter and receiver are using different speeds, stop bit will not be received at the expected time problem is called framing error. The start bit is alwa s a 8 and the stop bit is :.
A5
PARIT) BIT: In some s stems in order to maintain data integrit , the parit bit of the character
b te is included in the data frame. The parit bit is odd or even. In case of an odd parit bit the number of data bits of a book of including the parit bit, is even.
B5
DATA TRANSFER RATE:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
The rate of data transfer in serial data communication is stated in bps. %nother widel used terminolog for bps is baud rate. $aud rate is defined as the number of signal changes per second.
9.2 RS2*2 STANDARDSA
Two allow compatibilit among the data communication e1uipment made b various manufacturersN an interfacing standard called ,#242, was set b the electronics industries association (&I%) in :J>8. ,# 242 is the standard defined for the connection of H'ata Terminal &1uipmentH ('T&) to H'ata (ommunications &1uipmentH ('(&). 'T& is a generic term for an item which forms part of the Hinformation processingH portions of a s stem. &xamples areA computer, printer, and terminal. '(& is a device, which provides an interface between a 'T& and a communications link. In ,# 242, a : is represented b ;4 to ;256 which is called )ark, while a 8 bit is I 4 to I 256 which is called #pace. To connect an ,# 242 to a Vc s stem, voltage converters such as )ax 242are used. )ax 242 I( chips are commonl referred to as line drivers.7.4. )%K 242. The ,# 242 is not compatible with micro controllers, so a line driver converts the ,# 242Gs signals to TT< voltage levels.
9.* (ir l ss Comm,$ica%io$:
9.*.1 I$%ro!,c%io$: ,adio fre1uenc electronic. The transmitting baseband signal is subjected to a predetermined signal process, input to a modulator, which modulates a carrier wave signal. The modulated carrier wave signal is converted into a radio fre1uenc b a transmitting radio;fre1uenc circuit and amplified to a predetermined transmitting power, and transmitted to the base station from (,/) transmitters are widel used in radio fre1uenc of efficient, low cost
communications s stems. .ith the increasing availabilit
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
the antenna via the duplexer. (ommunication s stems are known to support wireless and wire lined communications between wireless and9or wire lined communication devices. #uch communication s stems range from national and9or international cellular telephone s stems to the Internet to point;to;point in;home wireless networks. 'epending on the t pe of wireless communication s stem, a wireless communication device, such as a cellular telephone, two;wa radio, personal digital assistant ("'%), personal computer ("(), laptop computer, home entertainment e1uipment, etc., communicates directl or indirectl with other wireless communication devices. 9.*.2 Tra$smi%% r i$ RF Tra$sc i> r: The base stations and subscriber units include radio fre1uenc transmitters and ,/ receivers, together the Gre called H,/ transceivers.H ,/ transceivers service the wireless links between the base stations and subscriber units. The ,/ transmitter receives a base band signal from a base band processor, converts the base band signal to an ,/ signal, and couples the ,/ signal to an antenna for transmission. In most ,/ transmitters, the base band signal is first converted to an intermediate fre1uenc (I/) signal and then the I/ signal is converted to the ,/ signal. The data modulation stage converts raw data into base band signals in accordance with the particular wireless communication standard. The one or more intermediate fre1uenc stages mix the base band signals with one or more local oscillations to produce ,/ signals. The power amplifier amplifies the ,/ signals prior to transmission via an antenna.
9.*.* R c i> r i$ RF Tra$sc i> r: The function of the receiver is to detect signals in the presence of noise and interference, and provide amplification, down conversion and demodulation of the detected the signal such that it can be displa ed or used in a data processor. The ,/ receiver receives an ,/ signal, converts the ,/ signal to an I/ signal, and then converts the I/ signal to a base band signal, which it then provides to the base band processor. %s
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
is also known, ,/ transceivers t picall include sensitive components susceptible to noise and interference with one another and with external sources. The ,/ receiver is coupled to the antenna and includes a low noise amplifier, one or more intermediate fre1uenc stages, a filtering stage, and a data recover stage. The low noise amplifier receives an inbound ,/ signal via the antenna and amplifies it. The one or more intermediate fre1uenc stages mix the amplified ,/ signal with one or more local oscillations to convert the amplified ,/ signal into a baseband signal or an intermediate fre1uenc (I/) signal. T pical transmit circuitr includes a feedback loop (often a phase;locked loop, or "<<) that has a voltage;controlled oscillator (6(*) and a loop filter circuitr . "hase locked loops ("<<s) are becoming increasingl popular in integrated wireless transceivers as components for fre1uenc generation and modulation. "<<s are t picall used for one of a variet of functions, including fre1uenc translation to up;convert a baseband ($$) signal to an intermediate fre1uenc (I/) or to up;convert a baseband or I/ signal to ,/ prior to amplification b a power amplifier and transmission. Inductive9capacitive (<() oscillators are important elements of ,/ transmitters, where the <( oscillators are used as master oscillators. 9.*.+ D sig$ o- RF Tra$sc i> r: Transmitters and receivers for communication s stems generall are designed such that the are tuned to transmit and receive one of a multiplicit of signals having widel var ing bandwidths and which ma fall within a particular fre1uenc range. In an ,/ receiver, an incoming ,/ signal is first passed through an ,/ band pass filter to remove signal components outside of the fre1uenc range of the desired signal. The resulting filtered signal is then usuall amplified b a low noise amplifier. % radio fre1uenc receiver includes a fre1uenc converter for converting a received radio fre1uenc signal to an intermediate fre1uenc (I/) signal. %n I/ filter is coupled to the fre1uenc converter for limiting the I/ signal to the bandwidth of a communication channel.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
The band ;limited signal is applied to a demodulator where the signal is processed to recover the original baseband fre1uenc signal. % low power ,/ receiver circuit comprises a low noise preamplifier and double;balanced mixer, using novel monolithic micro strip inductors and transformers for radio fre1uenc applications using submicron bipolar ()*# process technolog . % direct;conversion receiver in a radio communication s stem is configured to have a var ing gain in order to track the var ing signal strength of the received ,/ signal. ,adio fre1uenc (,/) receivers for cellular phone base stations must provide high and sensitivit . %n important measure of a receiverGs degrees of both selectivit I( (integrated circuit)
performance is its sensitivit and one means for measuring this sensitivit is to compare the measured bit error rate ($&,) of a received signal with the signal to noise ratio. %ntennas are provided as accessories of ,/ receivers in order to provide the receivers with the capabilit of receiving ,/ signals that are transmitted over the air.
9.+ SPI Pro%ocol:
#"I stands for serial peripheral interface
Fig 7.1 SPI protocol It has four pins, the are, spiWcs, spiWclk, spiW#'I, spiW#'8.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
#piWcs pin is used to select the chip among the available chips. #piWclk gives the data rate of the transferring data. This protocol is used to interface the ))( to the )icrocontroller.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
3. GOOGLE EART=
!oogle &arth displa s satellite images of var ing resolution of the &arths surface, allowing users to see things like cities and houses looking perpendicularl down or at an obli1ue angle, with perspective (see also birds e e view). The degree of resolution available is based some what on the points of interest and popularit , but most land(except for islands) is covered in at least :5 meters of resolution. !oogle &arth allows users to search for addresses for some countries, enter co; ordinates, or simpl use the mouse to browse to a location. /or large parts of the surface of the earth onl 2' images are available, from almost vertical photograph . 6iewing this from obli1ue angle, there is perspective in the sense that objects which are hori0ontall far awa are seen smaller, but of course it is viewing a large photograph, not 1uite like a 4' view. /or other parts of the surface of the &arth 4' images of terrain and buildings are available. )an people use the applications to add their own data, making them available through various sources. !oogle earth is able to show all kinds of images overlaid on the surface of the earth and is also a .eb )ap #ervice client. !oogle &arth supports managing three;dimensional !eo;spatial data. ,ecentl , !oogle added a feature that allows users to monitor traffic speeds at loops located ever 288 ards in real;time. The T.estport4' model was created b 4' imaging firm %)4T' using long distance laser scanning technolog and digital photograph and is the first such model of an Irish town to be created. !oogle &arth can be used to view areas subjected to wide spread disasters, if !oogle supplies up to date images. /or example after the :2 Panuar 28:8 =aiti earth1uake images of =aiti were made available on :? Panuar .
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
Fig: 3.1 %o' >i . o- %1 gro,$! -rom Googl
ar%1 ma'
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
:. SOFT(ARE DESCRIPTION
In our project we use two softwares. *ne is ((# (ompiler micro vision for the simulation of the program.
:.1 CCS Com'il r So-%.ar :
((# (ompiler development tools for the )icro chip )icrocontroller %rchitecture support ever level of software developer from the professional applications engineer to the student just learning about embedded software. The industr ;standard ((# (ompiler, )acro %ssemblers, 'ebuggers, ,eal;time Cernels, #ingle;board (omputers, and &mulators support all 785: derivatives and help ou get our projects completed on schedule.
:.1.1 Sim,la%io$: The #imulator allows ou to debug programs using onl environment, does much more than simpl code, on;chip peripherals, external signals, and I9*. our "( using simulation
drivers provided b ((# (ompiler and various third;part developers. % good simulation simulate the instruction set of a microcontroller O it simulates our entire target s stem including interrupts, startup
:.1.2 Us o- So-%.ar -or E@ c,%io$ o- #icroco$%roll r Programs: ((# (ompiler development tools for the )( architecture support ever level of software developer from the professional applications engineer to the student just learning about embedded software development. The industr ;standard ((# (ompiler, macro assemblers, debuggers, real, time Cernels, #ingle;board computers and emulators support all microcontroller derivatives
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
and help ou to get more projects completed on schedule. The ((# (ompiler software development tools are designed to solve the complex "roblems facing embedded software developers. Those are listed below.
:.1.* Pro"l ms Faci$g Em" !! ! So-%.ar D > lo' rs:
.hen starting a new project, simpl select the microcontroller ou the device database and the Vvision I'& sets all compiler, assembler, linker, and memor options for ou. The ((# (ompiler V 6ision debugger accuratel '9% converter and ".) modules)of our aver device. #imulation helps ou understand h9w configurations and avoids time simulates on;chip
peripherals ("(, (%+, @%,T, #"I, Interrupts, I9* ports, %9' converter,
wasted on setup problems. %dditionall , with simulation, ou can write and test applications before target h9w is available. .hen ou are read to begin testing our s9w application with target h9w, use the )*+5:, )*+4J8, )*+%'I, or flash )*+5: target monitors, the I#'5: In;# stem 'ebugger, or the @<I+C @#$;PT%! adapter to download and test program code on our target s stem. J.:.3 Cr a%i$g a ProD c%:
#elect "roject ; +ew "roject. #elect a director and enter the name of the project file. #elect "roject ; #elect 'evice and select an 785:, 25:, or (:>x9#T:8 device from the 'evice (reate source files to add to the project.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
#elect "roject ; Targets, !roups, /iles. %dd9/iles, select #ource !roup:, and add the source files to the project. #elect "roject ; *ptions and set the tool options. +ote when ou select the target device from the 'evice 'atabaseX all;special options are set automaticall . -ou t picall onl need to configure the memor map of our target hardware. 'efault memor model settings are optimal for most
:.1.4 E>al,a%io$ So-%.ar Limi%a%io$s:
The compiler, assembler, linker, and debugger are limited to 2 Cb tes of object code but source code ma be an si0e. "rograms that generate more than 2 Cb tes of object code will not compile, assemble, or link.
:.2 Program D,m'i$g Proc ss:
The program must be dumped in the )icrocontroller to run and given the output of the project. .e use the universal programmer for the dumping processes. The programmer can be written the program in different t pes like %#) or ( language. That ma be cannot directl dumped in )icrocontroller. The written program can converted in below t pes of format. :. =exa decimal code 2. $inar code 4. Intel 3. )otorola In our project we write the program in ( language and that ma be converted into =exa decimal code then dumped in to )icrocontroller using the ((# (ompiler software.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
9.3 coding:
Yinclude Z:7/352.hF 99/or )icrocontroller Yinclude Zmmcsd.cF 99/or )emor (ard Yinclude Zfat.cF 99/or /at file s stem inside )emor (ard
Yuse dela (clockL28)) Yuse Yuse rs242 (baud L J>88, xmitL"I+W(>,rcvL"I+W(?,streamL"() rs242 (baud L 3788, xmitL"I+W%:,rcvL"I+W%8,streamL!"#)
char data[:28\N char gprmc[\ L ]H!",)(H^N void getW!"#W!",)(Wdata() ]
while(:) ] fgets(data,!"#)N 99!ets the #erial "ort 'ata from !"# ,eceiver if(strstr(data,gprmc)N 99search for !",)( in data breakN ^
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
^ void main(void) ]
char filename[28\ L Hm file.txtHN 99C#" G9G re1uired before fname char buffer[:55\N char optWbuffer[:88\N char validWdata[\ L ] H,%,H ^N char invalidWdata[\ L ] H,6,H ^N int iN 99 pointer to the buffer char fN i L fatWinit()N 99Initialise /%T file s stem if (i) 99If init fails ]
fprintf("(,H_r_n_n&,,*, I+ITI%<IBI+! /%T_r_n_nH)N
^ else 99*C
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
fprintf("(,HInit done _r_nH)N
if (`input("I+W':)) 99If ': push button is pressed then /ormat the memor card
dela Wms(:888)N
if(`input("I+W':)) ]
/ormat)edia(H:8375?>H)N 99/ormat :!$ (ard
dela Wms(5888)N 99It ma take max of 5 seconds for formatting
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
fprintf("(,H_r_n'eleted *ld 'ata. ,estart_r_nH)N
while(:)N 99wait indefinitel
(restart the microcontroller)
^ ^
outputWhigh("I+W'2)N 99)icrocontroller =ealth (heck Indicator outputWhigh("I+W'4)N dela Wms(:888)N outputWlow("I+W'4)N outputWlow("I+W'2)N dela Wms(:888)N outputWhigh("I+W'4)N outputWhigh("I+W'2)N dela Wms(:888)N outputWlow("I+W'4)N outputWlow("I+W'2)N 99&+' if(`input("I+W$8)) 99I/ $8 push button is pressed then cop data to "(
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
if(`input("I+W$8))
fprintf("(,H_r_nSSSSSSS#tart !"# 'ataSSSSSSS_r_nH)N f L fopen(filename,GrG)N 99*pen file in read mode while(feof(f)) 99while end of file ]
fgetstring(data,f)N 99cop fputs(data,"()N 99send data to "(
fclose(f)N 99close file fprintf("(,H_r_nSSSSSSSSS&+' !"# 'ataSSSSSSSSS_r_nH)N fprintf("(,H_r_n,estart and use 'elete button for deleting this data._r_nH)N while(:)N 99wait indefinitel
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
^ ^
f L fopen(filename,GaG)N 99*pen9create file append mode while(:) ]
getW!"#W!",)(Wdata()N 99!et data from !"# receiver
if(strstr(data,validWdata)) 99(heck for valid data.If the gps data contains H,%,H then itGs a valid data ]
outputWlow("I+W'4)N 99,&' <&' *// fputstring(data,f)N 99cop data to file (append)
outputWhigh("I+W'2)N 99!reen <&' *+ indicating valid data ^ if(strstr(data,invalidWdata)) 99If the gps data contains H,6,H then its invalid data
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
outputWhigh("I+W'4)N 99,&' <&' *n indicating invalid data outputWlow("I+W'2)N 99!reen <&' *// ^
outputWlow("I+W'2)N 99<&' *// outputWlow("I+W'4)N 99 <&' *// fclose(f)N
^ ^
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
1;.RESULT
1;.1 T1 r s,l% -rom %1 GPS r c i> r:
The data from the !"# receiver which is stored in the ))( is in the +)&% format. The parameters such as Time, active (working), latitude, north, longitude, east, speed, altitude and date and active (working) are given below. R!",)(,:8483J.888,%,:?2:.:8?:,+,8?748.3384,&,8.:?,J>.>5,:>84:8,,,% R!",)(,:8485:.888,%,:?2:.:8?8,+,8?748.338J,&,8.27,?8.J3,:>84:8,,,% R!",)(,:84854.888,%,:?2:.:8?:,+,8?748.33:2,&,8.35,37.48,:>84:8,,,% R!",)(,:84855.888,%,:?2:.:8>7,+,8?748.33:>,&,8.38,53.2?,:>84:8,,,% R!",)(,:8485?.888,%,:?2:.:8>5,+,8?748.3324,&,8.43,?8.38,:>84:8,,,% R!",)(,:8485J.888,%,:?2:.:8>>,+,8?748.3328,&,8.4:,>4.7:,:>84:8,,,% R!",)(,:84:8:.888,%,:?2:.:8>?,+,8?748.332:,&,8.42,57.>4,:>84:8,,,% R!",)(,:84:84.888,%,:?2:.:8>2,+,8?748.33:?,&,8.28,?5.3>,:>84:8,,,% R!",)(,:84:85.888,%,:?2:.:8>2,+,8?748.33:?,&,8.48,?:.7:,:>84:8,,,% R!",)(,:84:8?.888,%,:?2:.:8>4,+,8?748.33:7,&,8.2:,>5.2>,:>84:8,,,% R!",)(,:84:8J.888,%,:?2:.:8>4,+,8?748.33:J,&,8.:3,>5.2>,:>84:8,,,% R!",)(,:84:::.888,%,:?2:.:8>4,+,8?748.3328,&,8.2>,>7.77,:>84:8,,,% R!",)(,:84::4.888,%,:?2:.:8>3,+,8?748.332:,&,8.44,55.J5,:>84:8,,,%
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
1;.2 T1 r s,l% i$ %1 PC:
The data given b the !"# receiver which is stored in the ))( is transmitted the "( with the help of the ,/ transceiver. In the "( the +)&% format data is converted to the C)B format and then when put in the !**!<& &arth we get a map which is shown below.
Fig.1;.1 s1o.i$g %1 ro,% a$! la%/ lo$g/ s' ! a$! al% -rom %1 Googl Ear%1 The distance travelled is connected with a help of the line and the parameters such as time, date, speed, altitude are shown.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
11. APPLICATIONS AND AD0ANTAGES
11.1 A''lica%io$s:
a a a a <atitude and longitude displa ed can be used for location identification. 6ehicle travel record management. .ild life researches. In ever field to monitoring easil .
11.2 A!>a$%ag s:
@sage of ))( card helps to store more data <ow cost #ince there is no re1uirement for a !#) modem it does not involve an data transfer charges /inds applications in different areas like Tourism, +avigation etc.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
12. CONCULSION
Thus cab (vehicle) position logging s stem using !"# and ))( ()ultimedia (ard) is constructed. /irstl , integrating features of all the hardware components used. "resence of ever module has been reasoned out and placed carefull thus contributing to the best working of the unit. #econdl , using advanced components such as !"# and wireless network with the help of the growing technolog , the project has been successfull implemented. In this project an effort has been made to stud monitoring of the cab (vehicle) and to implement it.
12.1 F,%,r Sco' :
.ith the use of high end micro controllers and graphical <(' displa s we can expect the data of the micro controller to be used d namicall during the journe it self to find our position instead of positioning in the !oogle earths map after bringing the memor card available to the "(.
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
1*. APPENDIE
1*.1 Sc1 ma%ic Diagram:
Fig 1*.1 sc1 ma%ic !iagram
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
1*.2 =ar!.ar S$a's1o%:
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
Fig 1*.2 S$a' S1o%
1*.* A""r >ia%io$s:
%@( $T# $#( (&"T &I, &T#I =<, I)&I IT@ I)#I <% )#I#'+ )#( )%" )#,+ )# )) "*T# %uthentication (enter $ase Transceiver #tation $ase #tation (ontroller (onference of &uropean "osts and Telegraphs &1uipment Identit ,egister. &uropean Telecommunication #tandards Institute =ome <ocation ,egister International )obile &1uipment Identit International Telecommunication @nion International )obile #ubscriber Identit <ast known <ocation %rea )obile #ubscriber I#'+ )obile service #witching (enter )obile %pplication "art )obile #tation ,oaming +umber )obile station )obilit )anagement la er "lain *ld Telephone #ervice
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
"#T+ "#"'+ "<)+ ,adio ,$# #I) T(@ T,%@ 6<,
"ublic switched telephone network packet switched public data network "ublic land mobile network ,esources management (,,) ,emote $ase station #ubscriber Identit )odule Transcoding @nit Transcoding ,ate and %daptation @nit 6isitor <ocation ,egister
1+. BIBLIOGRAP=)
REFERENCES:
:. !lobal positioning s stems inertial navigation, and integration )ohinders, !rewal, <awrence, , .eil, %ngus p %ndrews 2. !"# for '@))I&# $- Poel )c +amara 4. +ational )arine &lectronics %ssociationA httpA99www.nmea.org 3. Torsten $aumbachGs web siteA httpA99pandora.inf.uni;jena.de9ttbb9
( " R - r $c s:
1%%':66 $..iki' !ia.org6.iki6GPS123C8+
1%%':66 $..iki' !ia.org6.iki6Ca% gor&:##C
1%%':66....microc1i'.com6...'ro!,c%s6D >ic s.as'@F!DocNam G $;1;28 1%%':66....1o.s%,--.orks.com 1%%':66....3;41'roD c%s.com
www.final-yearproject.com | www.finalyearthesis.com
GPS BASED CAB MONITORING SYSTEM
www.final-yearproject.com | www.finalyearthesis.com
Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Instruction: Multiple Choice: Select The Letter of The Bet Answer. Write Your Answer in The Answer Sheet Provided For You. No ERASURES of Any KindDokument7 SeitenInstruction: Multiple Choice: Select The Letter of The Bet Answer. Write Your Answer in The Answer Sheet Provided For You. No ERASURES of Any Kindmj Canilang100% (1)
- Revenue Cycle Management Comprehensive Solutions - 0Dokument4 SeitenRevenue Cycle Management Comprehensive Solutions - 0avinashn1984Noch keine Bewertungen
- Truth Beyond Paradox (Final Download)Dokument217 SeitenTruth Beyond Paradox (Final Download)andreas waneyNoch keine Bewertungen
- Lecture6-Design Expert Software - TutorialDokument29 SeitenLecture6-Design Expert Software - TutorialAzwan ShakraniNoch keine Bewertungen
- Hitachi ZX75USDokument9 SeitenHitachi ZX75US3man 9394Noch keine Bewertungen
- FortiManager Study Guide-OnlineDokument398 SeitenFortiManager Study Guide-OnlineFelipe Gabriel Nieto Concha25% (4)
- PWM Driver VerilogDokument24 SeitenPWM Driver Veriloglizhi0007Noch keine Bewertungen
- True DipDokument7 SeitenTrue DipKirsten Audrey100% (1)
- Svmtrain MDokument10 SeitenSvmtrain Mlizhi0007Noch keine Bewertungen
- Closed Loop Speed and Position Control of DC MotorsDokument7 SeitenClosed Loop Speed and Position Control of DC Motorslizhi0007Noch keine Bewertungen
- Advanced PID Controller ImplementationDokument13 SeitenAdvanced PID Controller Implementationlizhi0007100% (1)
- SVM Tutorial Part1Dokument9 SeitenSVM Tutorial Part1lizhi0007Noch keine Bewertungen
- Giao tiếp I2C vs DS1302Dokument14 SeitenGiao tiếp I2C vs DS1302lizhi0007Noch keine Bewertungen
- Detecting Arrow KeysDokument3 SeitenDetecting Arrow Keyslizhi0007Noch keine Bewertungen
- Control A DC Motor With An ArduinoDokument5 SeitenControl A DC Motor With An Arduinolizhi0007Noch keine Bewertungen
- Simple DFT in OpencvDokument13 SeitenSimple DFT in Opencvlizhi0007100% (2)
- 4.3 The Non-Inverting AmplifierDokument5 Seiten4.3 The Non-Inverting Amplifierlizhi0007Noch keine Bewertungen
- Initializations: Source CodeDokument5 SeitenInitializations: Source Codelizhi0007Noch keine Bewertungen
- 2.2 BiasDokument14 Seiten2.2 Biaslizhi0007Noch keine Bewertungen
- 4.1 Opamps Introduction The Ideal AmplifierDokument2 Seiten4.1 Opamps Introduction The Ideal Amplifierlizhi0007Noch keine Bewertungen
- 3.3 FET AmplifierDokument5 Seiten3.3 FET Amplifierlizhi0007100% (1)
- 2.1 Introduction BJTDokument3 Seiten2.1 Introduction BJTlizhi0007Noch keine Bewertungen
- 3.2 FET BiasingDokument4 Seiten3.2 FET Biasinglizhi0007Noch keine Bewertungen
- 1.3 Application CircuitsDokument8 Seiten1.3 Application Circuitslizhi0007Noch keine Bewertungen
- Fpga Based Vga Driver and Arcade GameDokument37 SeitenFpga Based Vga Driver and Arcade Gamelizhi00070% (1)
- Kalman Filter FPGADokument100 SeitenKalman Filter FPGAlizhi0007Noch keine Bewertungen
- Professionalism in The Dental Office, Part One: I Chairside Conscience IDokument3 SeitenProfessionalism in The Dental Office, Part One: I Chairside Conscience IKingjokerNoch keine Bewertungen
- HA2 Week 9: Lesson 1 Homework: X y X yDokument9 SeitenHA2 Week 9: Lesson 1 Homework: X y X ySebastien TaylorNoch keine Bewertungen
- Chapter II Sample ThesisDokument13 SeitenChapter II Sample ThesisAllen Bradley OngNoch keine Bewertungen
- Avy eDokument11 SeitenAvy emsvkumar0% (1)
- Day 3 Reflection Paper - CmeDokument4 SeitenDay 3 Reflection Paper - Cmeapi-322527937Noch keine Bewertungen
- Tantric Poetry of Kobo Daishi Kukai - Translated From Classical Chinese by Ronny GreenDokument20 SeitenTantric Poetry of Kobo Daishi Kukai - Translated From Classical Chinese by Ronny GreenHerko van BergenNoch keine Bewertungen
- Business Plan PDFDokument86 SeitenBusiness Plan PDFNicholas SalisNoch keine Bewertungen
- WordDokument48 SeitenWordenkelene.zulfajNoch keine Bewertungen
- Micro Hydro BrochureDokument4 SeitenMicro Hydro BrochureErlangga SatyawanNoch keine Bewertungen
- Lembar Observasi Kimia PKL 2023Dokument41 SeitenLembar Observasi Kimia PKL 2023Nur Sri WahyuniNoch keine Bewertungen
- OverlandersDokument17 SeitenOverlandersJoe FloodNoch keine Bewertungen
- Bohemian RhapsodyDokument5 SeitenBohemian RhapsodyTheresia Angel WidianaNoch keine Bewertungen
- Ieo Sample Paper Class-5Dokument2 SeitenIeo Sample Paper Class-5Dev AhanaNoch keine Bewertungen
- 7 TH CSDokument2 Seiten7 TH CSkumarNoch keine Bewertungen
- Capitec Case StudyDokument6 SeitenCapitec Case StudyMpho SeutloaliNoch keine Bewertungen
- Renub Research: Singapore Medical Tourist Arrivals, Medical Tourism Market & Forecast To 2015Dokument13 SeitenRenub Research: Singapore Medical Tourist Arrivals, Medical Tourism Market & Forecast To 2015api-114525849Noch keine Bewertungen
- Self-Assessment Observation and Assessment of Child DevelopmentDokument3 SeitenSelf-Assessment Observation and Assessment of Child Developmentapi-508676940Noch keine Bewertungen
- Passed 1489-13-21MELCS Ifugao The Mole Concept and Mass of SubstancesDokument28 SeitenPassed 1489-13-21MELCS Ifugao The Mole Concept and Mass of SubstancesPowerBob TVNoch keine Bewertungen
- Slow LearnerDokument33 SeitenSlow LearnerMuhammad Khairul Nizam100% (1)
- HR-Security Profile OptionDokument1 SeiteHR-Security Profile Optionnil77Noch keine Bewertungen
- Graphics View FrameworkDokument7 SeitenGraphics View FrameworkTxkti BabelNoch keine Bewertungen
- Unit 2 Computer Hardware and SoftwareDokument24 SeitenUnit 2 Computer Hardware and SoftwareNgHanSeongNoch keine Bewertungen
- Chapter-Ii Review of LiteratureDokument8 SeitenChapter-Ii Review of LiteratureANU GRAPHICSNoch keine Bewertungen