Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- AADA Road Atlas Vol 1 - The East Coast IIDokument66 SeitenAADA Road Atlas Vol 1 - The East Coast IIfauxpaws50% (2)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Terra Primate Introductory PackDokument19 SeitenTerra Primate Introductory PackAnthony RossNoch keine Bewertungen
- Design and Evaluation of Inflatable Wings For UavsDokument290 SeitenDesign and Evaluation of Inflatable Wings For UavsmegustalazorraNoch keine Bewertungen
- Apollo Mission Techniques. Missions F and G Lunar Orbit Activities. Revision A, Volume 1 Techniques DescriptionDokument103 SeitenApollo Mission Techniques. Missions F and G Lunar Orbit Activities. Revision A, Volume 1 Techniques DescriptionBob Andrepont100% (1)
- ALCPT Test111Dokument3 SeitenALCPT Test111narong kamneth20% (5)
- Titan Nasa PDFDokument236 SeitenTitan Nasa PDFMilan JavornikNoch keine Bewertungen
- Project Redlight Letter 1980Dokument3 SeitenProject Redlight Letter 1980Daniel NortonNoch keine Bewertungen
- Concept To RealityDokument233 SeitenConcept To RealityVincent S Ryan100% (2)
- Structure Design A350 KAIDokument56 SeitenStructure Design A350 KAIManoj Manoharan91% (11)
- Answer Saved Marked Out of 1.00Dokument16 SeitenAnswer Saved Marked Out of 1.00suci sejatiNoch keine Bewertungen
- Starlink: Project Realised by Mihai PostolacheDokument10 SeitenStarlink: Project Realised by Mihai PostolacheMihai Postolache100% (2)
- MSFC NASA Robotics Academy 2011 Flight Robotics LaboratoryDokument1 SeiteMSFC NASA Robotics Academy 2011 Flight Robotics LaboratoryDavid B MittelmanNoch keine Bewertungen
- Texas A&M University ScholarshipDokument2 SeitenTexas A&M University ScholarshipDavid B MittelmanNoch keine Bewertungen
- Case Western Reserve University ScholarshipDokument2 SeitenCase Western Reserve University ScholarshipDavid B Mittelman100% (1)
- FIRST Robotics - FRC Mechanical PresentationDokument57 SeitenFIRST Robotics - FRC Mechanical PresentationDavid B MittelmanNoch keine Bewertungen
- Antennas For Multiple Spot Beam SatellitesDokument9 SeitenAntennas For Multiple Spot Beam SatellitesTariqMahmoodNoch keine Bewertungen
- Falco UAVDokument2 SeitenFalco UAVtomay777Noch keine Bewertungen
- Intro To Universe PDFDokument35 SeitenIntro To Universe PDFNatasa ElenaNoch keine Bewertungen
- Enstrom 280C RFM (1998)Dokument112 SeitenEnstrom 280C RFM (1998)JeremiahJohnsonNoch keine Bewertungen
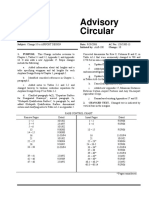
- Faa Design Standards)Dokument77 SeitenFaa Design Standards)Nicole SantosNoch keine Bewertungen
- Test Bank Lesikars Business Communication Connecting in A Digital World 13th EditionDokument6 SeitenTest Bank Lesikars Business Communication Connecting in A Digital World 13th EditionRichard1LauritsenNoch keine Bewertungen
- Professional Ethics Unit - IIIDokument12 SeitenProfessional Ethics Unit - IIIRajkamalChichaNoch keine Bewertungen
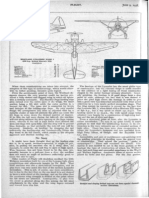
- Flight.: Westland Lysander MarkDokument1 SeiteFlight.: Westland Lysander Markseafire47Noch keine Bewertungen
- Universal Gravitation LawDokument11 SeitenUniversal Gravitation Lawanurag3069Noch keine Bewertungen
- Digital Avionics : EICAS LNDokument5 SeitenDigital Avionics : EICAS LNM S PrasadNoch keine Bewertungen
- Science 8 - SIM - Q2 - Module 6 - Week 6Dokument30 SeitenScience 8 - SIM - Q2 - Module 6 - Week 6Irene SivaNoch keine Bewertungen
- STS-65 Space Shuttle Mission ReportDokument65 SeitenSTS-65 Space Shuttle Mission ReportBob AndrepontNoch keine Bewertungen
- General StudiesDokument91 SeitenGeneral StudiesYARDLEYNoch keine Bewertungen
- Heat TransferDokument2 SeitenHeat TransferAmal JoyNoch keine Bewertungen
- O o o oDokument39 SeitenO o o oDunareanu AvraamNoch keine Bewertungen
- Trabajo Gruapal Ingles 2Dokument4 SeitenTrabajo Gruapal Ingles 2Diego Manrique CarrionNoch keine Bewertungen
- 15 TestbankDokument23 Seiten15 TestbankRoss AuNoch keine Bewertungen
- Amateur Astronomy in IndiaDokument4 SeitenAmateur Astronomy in IndiaBiman BasuNoch keine Bewertungen
- SOLUTIONS To PASSIVE Activity Pack PDFDokument6 SeitenSOLUTIONS To PASSIVE Activity Pack PDFMoncef ComputerNoch keine Bewertungen