Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Piano and Vocal ScoreDokument164 SeitenPiano and Vocal ScoreAgustin ViganoNoch keine Bewertungen
- Microstar Product Catalog 2016Dokument22 SeitenMicrostar Product Catalog 2016Dell Garcia100% (1)
- Glimpse of Us Sheet Music JojiDokument7 SeitenGlimpse of Us Sheet Music JojiMinh Trần100% (11)
- Breath ManagementDokument14 SeitenBreath ManagementPaulaRiveroNoch keine Bewertungen
- Kjfk. Sid StarDokument58 SeitenKjfk. Sid Starjpzemog100% (1)
- My Favourite Singer Is JonyDokument10 SeitenMy Favourite Singer Is JonyXAYRULLO BOQIJONOVNoch keine Bewertungen
- Interpretation of DataDokument30 SeitenInterpretation of DataNguyen Ha Truc GiangNoch keine Bewertungen
- The Miracle of Mindfulness - An Introduction To The Practice of Meditation (1999) by Thich Nhat HanhDokument31 SeitenThe Miracle of Mindfulness - An Introduction To The Practice of Meditation (1999) by Thich Nhat HanhaaaaNoch keine Bewertungen
- MR Jones Counting CrowsDokument2 SeitenMR Jones Counting Crowslore1983scribdNoch keine Bewertungen
- Yamaha Corporation (13035676)Dokument13 SeitenYamaha Corporation (13035676)NguyenZumNoch keine Bewertungen
- Dream On GuitarDokument5 SeitenDream On GuitarMarc A. Pierre0% (1)
- Cm601 ManualDokument228 SeitenCm601 ManualjeronimoiiiNoch keine Bewertungen
- 651307p ManualDokument16 Seiten651307p Manuallacc2211Noch keine Bewertungen
- God of This City - GDokument1 SeiteGod of This City - GMichael Gray100% (2)
- Close To You & Fly Me To The Moon - Drum SetDokument2 SeitenClose To You & Fly Me To The Moon - Drum SetKobe ThuyNoch keine Bewertungen
- Js Nila Mugam Parthu1 Tamil Novel 1Dokument41 SeitenJs Nila Mugam Parthu1 Tamil Novel 1Melicia Milhomme67% (3)
- Ujian Tengah Semester SMK Puja Mahardika: Nama: Kelas: Xi TKJ MAPEL: Bahasa InggrisDokument4 SeitenUjian Tengah Semester SMK Puja Mahardika: Nama: Kelas: Xi TKJ MAPEL: Bahasa InggrisHardi ekoNoch keine Bewertungen
- Goda Devi Kalyanam in TeluguDokument2 SeitenGoda Devi Kalyanam in TeluguGerryNoch keine Bewertungen
- 132-Warr Amdt 40Dokument12 Seiten132-Warr Amdt 40istiarNoch keine Bewertungen
- Specifications: R&S®EVS300 ILS/VOR AnalyzerDokument10 SeitenSpecifications: R&S®EVS300 ILS/VOR AnalyzerTimofeyNoch keine Bewertungen
- 2005 Hyundai Terracan 101241Dokument539 Seiten2005 Hyundai Terracan 101241Alan Jesus Chu ComesañaNoch keine Bewertungen
- East West Quantum Leap - Symphonic Orchestra Platinum Edition (KOMPAKTworking in KONTAKT) DownloadDokument2 SeitenEast West Quantum Leap - Symphonic Orchestra Platinum Edition (KOMPAKTworking in KONTAKT) DownloadMegatoreNoch keine Bewertungen
- FonetikaDokument26 SeitenFonetikaangelinaagNoch keine Bewertungen
- Unitivity 5000 In-Building Wireless Solution: Software Version 5Dokument184 SeitenUnitivity 5000 In-Building Wireless Solution: Software Version 5lisamharleyNoch keine Bewertungen
- WAFB, WAHP, WAVV Airport ChartDokument4 SeitenWAFB, WAHP, WAVV Airport ChartAbang Fayyad0% (1)
- Design A Square Microstrip Patch Antenna at 2.4 GHZ, and Comparison Between Unslotted and Slotted VersionDokument5 SeitenDesign A Square Microstrip Patch Antenna at 2.4 GHZ, and Comparison Between Unslotted and Slotted VersionerniNoch keine Bewertungen
- Ulus 10551Dokument34 SeitenUlus 10551Chass OokaNoch keine Bewertungen
- The Indian Telecom StoryDokument17 SeitenThe Indian Telecom Storypriyankkothari123Noch keine Bewertungen
- Ma000025 PDFDokument82 SeitenMa000025 PDFAnonymous Zh5qsFaaNoch keine Bewertungen
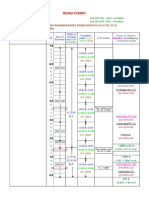
- Road Chart: Kakinada-Rajahmundry Road From KM 0/0 To 27/0Dokument4 SeitenRoad Chart: Kakinada-Rajahmundry Road From KM 0/0 To 27/0Phani PitchikaNoch keine Bewertungen