Das könnte Ihnen auch gefallen
- MATH2045: Vector Calculus & Complex Variable TheoryDokument50 SeitenMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- Algebra of Vector FieldsDokument4 SeitenAlgebra of Vector FieldsVladimir LubyshevNoch keine Bewertungen
- Sums of Two Squares: Pete L. ClarkDokument7 SeitenSums of Two Squares: Pete L. Clarkماجد اسماعيل سميرNoch keine Bewertungen
- Chapter 04c Frequency Filtering (Circulant Matrices) 2Dokument48 SeitenChapter 04c Frequency Filtering (Circulant Matrices) 2Manu PrasadNoch keine Bewertungen
- Weak Convergence of Measures: Probability and Mathematical Statistics: A Series of Monographs and TextbooksVon EverandWeak Convergence of Measures: Probability and Mathematical Statistics: A Series of Monographs and TextbooksNoch keine Bewertungen
- Inverse and Implicit Function TheoremDokument4 SeitenInverse and Implicit Function TheoremkelvinlNoch keine Bewertungen
- Vector EldsDokument18 SeitenVector Elds_an__Noch keine Bewertungen
- Hints Bmv1Dokument46 SeitenHints Bmv1sasidharchennamsettyNoch keine Bewertungen
- Exact Solution of Klein - Gordon EquationDokument23 SeitenExact Solution of Klein - Gordon EquationTAPAS KUMAR JANANoch keine Bewertungen
- Ayesha Ali 2016-B-Math-010: Cubic Spline InterpolationDokument12 SeitenAyesha Ali 2016-B-Math-010: Cubic Spline InterpolationMaryam BibiNoch keine Bewertungen
- Lecture09 AfterDokument31 SeitenLecture09 AfterLemon SodaNoch keine Bewertungen
- Book Space Time CalculusDokument73 SeitenBook Space Time CalculusJames ChapelNoch keine Bewertungen
- Primes and RiemannDokument9 SeitenPrimes and RiemanndiallomailNoch keine Bewertungen
- App.A - Detection and Estimation in Additive Gaussian Noise PDFDokument55 SeitenApp.A - Detection and Estimation in Additive Gaussian Noise PDFLê Dương LongNoch keine Bewertungen
- (ADVANCE ABSTRACT ALGEBRA) Pankaj Kumar and Nawneet HoodaDokument82 Seiten(ADVANCE ABSTRACT ALGEBRA) Pankaj Kumar and Nawneet HoodaAnonymous RVVCJlDU6Noch keine Bewertungen
- Counting of Ring HomomorphismDokument122 SeitenCounting of Ring HomomorphismUnos0% (1)
- Santos Number TheoryDokument101 SeitenSantos Number TheoryKun ZhouNoch keine Bewertungen
- Q A X X: Definition of Quadratic FormsDokument8 SeitenQ A X X: Definition of Quadratic FormshodanitNoch keine Bewertungen
- Abstract Algebra Assignment SolutionDokument12 SeitenAbstract Algebra Assignment SolutionStudy With MohitNoch keine Bewertungen
- LP SpaceDokument15 SeitenLP SpaceDaniel PiresNoch keine Bewertungen
- The Role of LUB Axiom in Real Analysis: S. Kumaresan School of Math. and Stat. University of Hyderabad Hyderabad 500046Dokument10 SeitenThe Role of LUB Axiom in Real Analysis: S. Kumaresan School of Math. and Stat. University of Hyderabad Hyderabad 500046Rakesh James100% (1)
- Differential FormsDokument10 SeitenDifferential FormsSamuel PatelNoch keine Bewertungen
- Bian - Deep Learning On Smooth ManifoldsDokument6 SeitenBian - Deep Learning On Smooth ManifoldsmattNoch keine Bewertungen
- Introduction To Calculus of Vector FieldsDokument46 SeitenIntroduction To Calculus of Vector Fieldssalem aljohiNoch keine Bewertungen
- Airy FunctionDokument6 SeitenAiry Functionmenonita89Noch keine Bewertungen
- Functions of Several Variables2Dokument5 SeitenFunctions of Several Variables2ngothaiquynhNoch keine Bewertungen
- Dirac FunctionDokument23 SeitenDirac FunctionArmando LiosNoch keine Bewertungen
- Properties of The Trinomial DistributionDokument2 SeitenProperties of The Trinomial DistributionPerry01Noch keine Bewertungen
- Sylvester Criterion For Positive DefinitenessDokument4 SeitenSylvester Criterion For Positive DefinitenessArlette100% (1)
- Additional Exercises For Convex Optimization PDFDokument187 SeitenAdditional Exercises For Convex Optimization PDFCliffordTorresNoch keine Bewertungen
- Nge KuttaDokument10 SeitenNge Kuttaaislah_1Noch keine Bewertungen
- Mathematics Introduction For MSCDokument52 SeitenMathematics Introduction For MSC34plt34Noch keine Bewertungen
- Bounds6Dokument12 SeitenBounds6Jack NachamkinNoch keine Bewertungen
- Clifford Algebra and The Projective Model of Hyperbolic Spaces PDFDokument11 SeitenClifford Algebra and The Projective Model of Hyperbolic Spaces PDFMartinAlfons100% (1)
- Department of Mathematics & Statistics PH.D Admission Written TestDokument5 SeitenDepartment of Mathematics & Statistics PH.D Admission Written TestArjun BanerjeeNoch keine Bewertungen
- Diffie-Hellman Key ExchangeDokument22 SeitenDiffie-Hellman Key ExchangesubburajsNoch keine Bewertungen
- Relativistic Electromagnetism: 6.1 Four-VectorsDokument15 SeitenRelativistic Electromagnetism: 6.1 Four-VectorsRyan TraversNoch keine Bewertungen
- Hilbert-Spaces MATH231B Appendix1of1Dokument28 SeitenHilbert-Spaces MATH231B Appendix1of1Chernet TugeNoch keine Bewertungen
- Difference Calculus: N K 1 3 M X 1 N y 1 2 N K 0 KDokument9 SeitenDifference Calculus: N K 1 3 M X 1 N y 1 2 N K 0 KAline GuedesNoch keine Bewertungen
- Numerical Analysis IntroductionDokument24 SeitenNumerical Analysis IntroductionLito LarongNoch keine Bewertungen
- Cayley HamiltonDokument2 SeitenCayley HamiltonSHASWAT SRIVASTAVA IET Lucknow StudentNoch keine Bewertungen
- EX03. 2D Static Analysis of Rectangular Plate With HoleDokument2 SeitenEX03. 2D Static Analysis of Rectangular Plate With HoleLisa DiasNoch keine Bewertungen
- Oscillation of Nonlinear Neutral Delay Differential Equations PDFDokument20 SeitenOscillation of Nonlinear Neutral Delay Differential Equations PDFKulin DaveNoch keine Bewertungen
- Rigid Bodies: 2.1 Many-Body SystemsDokument17 SeitenRigid Bodies: 2.1 Many-Body SystemsRyan TraversNoch keine Bewertungen
- Numerical ExamplesDokument44 SeitenNumerical ExamplesAslam Aly SaibNoch keine Bewertungen
- Porat A Gentle Introduction To Tensors 2014 PDFDokument87 SeitenPorat A Gentle Introduction To Tensors 2014 PDFManuel nuño bustamanteNoch keine Bewertungen
- Monte Carlo Integration LectureDokument8 SeitenMonte Carlo Integration LectureNishant PandaNoch keine Bewertungen
- Dynamical Systems: 5.1 Phase PortraitsDokument36 SeitenDynamical Systems: 5.1 Phase PortraitsRyan TraversNoch keine Bewertungen
- Stochastic Processes NotesDokument22 SeitenStochastic Processes Notesels_872100% (1)
- Discriptive Set Theory PDFDokument105 SeitenDiscriptive Set Theory PDFHarrison Daka LukwesaNoch keine Bewertungen
- Gtm150 Commutative Algebra Solutions-2Dokument33 SeitenGtm150 Commutative Algebra Solutions-2Jack HongNoch keine Bewertungen
- STAT 1520 NotesDokument61 SeitenSTAT 1520 NotesnojnfoNoch keine Bewertungen
- Classical First-Order Logic (Quick Review) : Episode 5Dokument18 SeitenClassical First-Order Logic (Quick Review) : Episode 5Sarbu AnaNoch keine Bewertungen
- Random Numbers and Monte Carlo MethodsDokument6 SeitenRandom Numbers and Monte Carlo MethodsAtif AvdovićNoch keine Bewertungen
- A Short Review On The Cost, Design, Materials and Challenges of The Prosthetics Leg Development and UsageDokument7 SeitenA Short Review On The Cost, Design, Materials and Challenges of The Prosthetics Leg Development and UsageheltaherNoch keine Bewertungen
- Bastian 2010Dokument10 SeitenBastian 2010heltaherNoch keine Bewertungen
- A Review On Prosthetics and Orthotics For Amputees and DisabledDokument15 SeitenA Review On Prosthetics and Orthotics For Amputees and DisabledheltaherNoch keine Bewertungen
- Simulation Explosive Impact On The Structure in LS-DYNA 1Dokument8 SeitenSimulation Explosive Impact On The Structure in LS-DYNA 1heltaherNoch keine Bewertungen
- Deformation of Polyurea Coated Steel Plates Under Localised Blast Loading 2013 International Journal of Impact EngineeringDokument10 SeitenDeformation of Polyurea Coated Steel Plates Under Localised Blast Loading 2013 International Journal of Impact EngineeringheltaherNoch keine Bewertungen
- Chassis Design Analysis AssignmentDokument6 SeitenChassis Design Analysis AssignmentheltaherNoch keine Bewertungen
- Submarine WarfareDokument1 SeiteSubmarine WarfareheltaherNoch keine Bewertungen
- Fatiguewizard Cs W5Dokument2 SeitenFatiguewizard Cs W5heltaherNoch keine Bewertungen
- Certification and LettersDokument6 SeitenCertification and LettersReimar FerrarenNoch keine Bewertungen
- QG To AIS 2017 PDFDokument135 SeitenQG To AIS 2017 PDFMangoStarr Aibelle VegasNoch keine Bewertungen
- TQM BisleriDokument27 SeitenTQM BisleriDishank ShahNoch keine Bewertungen
- The Concept of Crisis PDFDokument10 SeitenThe Concept of Crisis PDFJohann RestrepoNoch keine Bewertungen
- Tracker Pro Otm600 1.5Dokument19 SeitenTracker Pro Otm600 1.5Camilo Restrepo CroNoch keine Bewertungen
- Types of MemoryDokument3 SeitenTypes of MemoryVenkatareddy Mula0% (1)
- COGELSA Food Industry Catalogue LDDokument9 SeitenCOGELSA Food Industry Catalogue LDandriyanto.wisnuNoch keine Bewertungen
- Stock Prediction SynopsisDokument3 SeitenStock Prediction SynopsisPiyushPurohitNoch keine Bewertungen
- Validation of AnalyticalDokument307 SeitenValidation of AnalyticalJagdish ChanderNoch keine Bewertungen
- tdr100 - DeviceDokument4 Seitentdr100 - DeviceSrđan PavićNoch keine Bewertungen
- PartitionDokument5 SeitenPartitionKotagiri AravindNoch keine Bewertungen
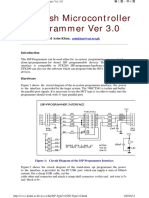
- ISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanDokument4 SeitenISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanSrđan PavićNoch keine Bewertungen
- 9.admin Rosal Vs ComelecDokument4 Seiten9.admin Rosal Vs Comelecmichelle zatarainNoch keine Bewertungen
- Communication On The Telephone InfoDokument30 SeitenCommunication On The Telephone Infomelese100% (1)
- Interest Rates and Bond Valuation: All Rights ReservedDokument22 SeitenInterest Rates and Bond Valuation: All Rights ReservedAnonymous f7wV1lQKRNoch keine Bewertungen
- Copeland PresentationDokument26 SeitenCopeland Presentationjai soniNoch keine Bewertungen
- Chat Application (Collg Report)Dokument31 SeitenChat Application (Collg Report)Kartik WadehraNoch keine Bewertungen
- Sciencedirect: Jad Imseitif, He Tang, Mike Smith Jad Imseitif, He Tang, Mike SmithDokument10 SeitenSciencedirect: Jad Imseitif, He Tang, Mike Smith Jad Imseitif, He Tang, Mike SmithTushar singhNoch keine Bewertungen
- In Comparison With Oracle 8i, 9i Is Have Lot Many New Features. Important IsDokument241 SeitenIn Comparison With Oracle 8i, 9i Is Have Lot Many New Features. Important IsBalaji ShindeNoch keine Bewertungen
- Accounting II SyllabusDokument4 SeitenAccounting II SyllabusRyan Busch100% (2)
- Sales Manager Latin AmericaDokument3 SeitenSales Manager Latin Americaapi-76934736Noch keine Bewertungen
- KrauseDokument3 SeitenKrauseVasile CuprianNoch keine Bewertungen
- SPC Abc Security Agrmnt PDFDokument6 SeitenSPC Abc Security Agrmnt PDFChristian Comunity100% (3)
- Reference: Digital Image Processing Rafael C. Gonzalez Richard E. WoodsDokument43 SeitenReference: Digital Image Processing Rafael C. Gonzalez Richard E. WoodsNisha JosephNoch keine Bewertungen
- CRC Implementation Code in CDokument14 SeitenCRC Implementation Code in CAtul VermaNoch keine Bewertungen
- Sign Language To Speech ConversionDokument6 SeitenSign Language To Speech ConversionGokul RajaNoch keine Bewertungen
- Project Management: Chapter-2Dokument26 SeitenProject Management: Chapter-2Juned BhavayaNoch keine Bewertungen
- Purchases + Carriage Inwards + Other Expenses Incurred On Purchase of Materials - Closing Inventory of MaterialsDokument4 SeitenPurchases + Carriage Inwards + Other Expenses Incurred On Purchase of Materials - Closing Inventory of MaterialsSiva SankariNoch keine Bewertungen
- EASY DMS ConfigurationDokument6 SeitenEASY DMS ConfigurationRahul KumarNoch keine Bewertungen
- Portfolio Report Zarin Tasnim Tazin 1920143 8Dokument6 SeitenPortfolio Report Zarin Tasnim Tazin 1920143 8Fahad AlfiNoch keine Bewertungen
- 2019 Business Credit with no Personal Guarantee: Get over 200K in Business Credit without using your SSNVon Everand2019 Business Credit with no Personal Guarantee: Get over 200K in Business Credit without using your SSNBewertung: 4.5 von 5 Sternen4.5/5 (3)
- These Are the Plunderers: How Private Equity Runs—and Wrecks—AmericaVon EverandThese Are the Plunderers: How Private Equity Runs—and Wrecks—AmericaBewertung: 3.5 von 5 Sternen3.5/5 (8)
- John D. Rockefeller on Making Money: Advice and Words of Wisdom on Building and Sharing WealthVon EverandJohn D. Rockefeller on Making Money: Advice and Words of Wisdom on Building and Sharing WealthBewertung: 4 von 5 Sternen4/5 (20)
- These are the Plunderers: How Private Equity Runs—and Wrecks—AmericaVon EverandThese are the Plunderers: How Private Equity Runs—and Wrecks—AmericaBewertung: 4.5 von 5 Sternen4.5/5 (14)
- Burn the Boats: Toss Plan B Overboard and Unleash Your Full PotentialVon EverandBurn the Boats: Toss Plan B Overboard and Unleash Your Full PotentialNoch keine Bewertungen
- Built, Not Born: A Self-Made Billionaire's No-Nonsense Guide for EntrepreneursVon EverandBuilt, Not Born: A Self-Made Billionaire's No-Nonsense Guide for EntrepreneursBewertung: 5 von 5 Sternen5/5 (13)
- Summary of The Black Swan: by Nassim Nicholas Taleb | Includes AnalysisVon EverandSummary of The Black Swan: by Nassim Nicholas Taleb | Includes AnalysisBewertung: 5 von 5 Sternen5/5 (6)
- The Masters of Private Equity and Venture Capital: Management Lessons from the Pioneers of Private InvestingVon EverandThe Masters of Private Equity and Venture Capital: Management Lessons from the Pioneers of Private InvestingBewertung: 4.5 von 5 Sternen4.5/5 (17)
- Ready, Set, Growth hack:: A beginners guide to growth hacking successVon EverandReady, Set, Growth hack:: A beginners guide to growth hacking successBewertung: 4.5 von 5 Sternen4.5/5 (93)
- The 17 Indisputable Laws of Teamwork Workbook: Embrace Them and Empower Your TeamVon EverandThe 17 Indisputable Laws of Teamwork Workbook: Embrace Them and Empower Your TeamNoch keine Bewertungen
- Burn the Boats: Toss Plan B Overboard and Unleash Your Full PotentialVon EverandBurn the Boats: Toss Plan B Overboard and Unleash Your Full PotentialBewertung: 4.5 von 5 Sternen4.5/5 (32)
- An easy approach to trading with bollinger bands: How to learn how to use Bollinger bands to trade online successfullyVon EverandAn easy approach to trading with bollinger bands: How to learn how to use Bollinger bands to trade online successfullyBewertung: 3 von 5 Sternen3/5 (1)
- The Merger & Acquisition Leader's Playbook: A Practical Guide to Integrating Organizations, Executing Strategy, and Driving New Growth after M&A or Private Equity DealsVon EverandThe Merger & Acquisition Leader's Playbook: A Practical Guide to Integrating Organizations, Executing Strategy, and Driving New Growth after M&A or Private Equity DealsNoch keine Bewertungen
- Creating Shareholder Value: A Guide For Managers And InvestorsVon EverandCreating Shareholder Value: A Guide For Managers And InvestorsBewertung: 4.5 von 5 Sternen4.5/5 (8)
- Product-Led Growth: How to Build a Product That Sells ItselfVon EverandProduct-Led Growth: How to Build a Product That Sells ItselfBewertung: 5 von 5 Sternen5/5 (1)
- The Illusion of Innovation: Escape "Efficiency" and Unleash Radical ProgressVon EverandThe Illusion of Innovation: Escape "Efficiency" and Unleash Radical ProgressNoch keine Bewertungen
- Valley Girls: Lessons From Female Founders in the Silicon Valley and BeyondVon EverandValley Girls: Lessons From Female Founders in the Silicon Valley and BeyondNoch keine Bewertungen
- Mind over Money: The Psychology of Money and How to Use It BetterVon EverandMind over Money: The Psychology of Money and How to Use It BetterBewertung: 4 von 5 Sternen4/5 (24)
- Mastering the VC Game: A Venture Capital Insider Reveals How to Get from Start-up to IPO on Your TermsVon EverandMastering the VC Game: A Venture Capital Insider Reveals How to Get from Start-up to IPO on Your TermsBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Startup CEO: A Field Guide to Scaling Up Your Business (Techstars)Von EverandStartup CEO: A Field Guide to Scaling Up Your Business (Techstars)Bewertung: 4.5 von 5 Sternen4.5/5 (4)
- Applied Corporate Finance. What is a Company worth?Von EverandApplied Corporate Finance. What is a Company worth?Bewertung: 3 von 5 Sternen3/5 (2)
- Warren Buffett Book of Investing Wisdom: 350 Quotes from the World's Most Successful InvestorVon EverandWarren Buffett Book of Investing Wisdom: 350 Quotes from the World's Most Successful InvestorNoch keine Bewertungen
- The Six Secrets of Raising Capital: An Insider's Guide for EntrepreneursVon EverandThe Six Secrets of Raising Capital: An Insider's Guide for EntrepreneursBewertung: 4.5 von 5 Sternen4.5/5 (8)