Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Idx Titex BrocasCentrarDokument14 SeitenIdx Titex BrocasCentrarmahendras2014Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Solution: (a) N = v/πD = 70,000 mm/80 = 279 rev/minDokument11 SeitenSolution: (a) N = v/πD = 70,000 mm/80 = 279 rev/minwoihoNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- BS 812-113 1990Dokument11 SeitenBS 812-113 1990surangaNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- ASME B18.17 - Wing-NutsDokument2 SeitenASME B18.17 - Wing-NutsMario FonsecaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Experimental Studies On Parametric Influence On Machining of Titanium With WEDMDokument4 SeitenExperimental Studies On Parametric Influence On Machining of Titanium With WEDMerpublicationNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Introduction To Numerical Control (NC)Dokument58 SeitenIntroduction To Numerical Control (NC)Dani AbHalimNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Valve Assy, Control, P - N Yy30v00036f1Dokument3 SeitenValve Assy, Control, P - N Yy30v00036f1刘奇雄Noch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Design and Manufacturing of 8 Cylinder Hydraulic Fixture For Boring Yoke On VMC 1050Dokument8 SeitenDesign and Manufacturing of 8 Cylinder Hydraulic Fixture For Boring Yoke On VMC 1050The ash Designe GalaryNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Radial Arm Drill Press: Operating Instructions and Parts ManualDokument32 SeitenRadial Arm Drill Press: Operating Instructions and Parts ManualMohamed ShabanNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- DORIAN - 80 20 eDokument36 SeitenDORIAN - 80 20 eAngel Eduardo Lopez SantanaNoch keine Bewertungen
- Topic 1 Design of FastenersDokument15 SeitenTopic 1 Design of FastenersSimon DavidNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- CH 1 - Introduction To FMS-MNFGDokument47 SeitenCH 1 - Introduction To FMS-MNFGAshenafi DressNoch keine Bewertungen
- Gagemaker Products: Thread FormDokument1 SeiteGagemaker Products: Thread FormCharles Guzman100% (1)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
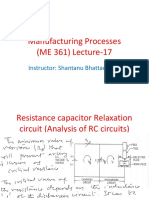
- Manufacturing Processes (ME 361) Lecture-17: Instructor: Shantanu BhattacharyaDokument21 SeitenManufacturing Processes (ME 361) Lecture-17: Instructor: Shantanu BhattacharyaSahil SundaNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Flexible Manufacturing System (FMS)Dokument30 SeitenFlexible Manufacturing System (FMS)k19ajay100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Abrasive Methods Engineering PDFDokument392 SeitenAbrasive Methods Engineering PDFGautam Tyagi100% (2)
- Forming and MachiningDokument10 SeitenForming and Machining33-Siddharth NairNoch keine Bewertungen
- LatheDokument6 SeitenLatheRavichandran GNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Master Cam X5 Lathe TutorialDokument8 SeitenMaster Cam X5 Lathe TutoriallionlionsherNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Parklex Technical Guide For Facade Cladding 2019 SpreadsDokument29 SeitenParklex Technical Guide For Facade Cladding 2019 SpreadsAlin George CoțovanuNoch keine Bewertungen
- Hyundai WIA LM1600 1800TT Instruction ManualDokument80 SeitenHyundai WIA LM1600 1800TT Instruction Manualsunhuynh100% (1)
- ME 303 (Manufacturing Engineering) - 01 - IntroductionDokument32 SeitenME 303 (Manufacturing Engineering) - 01 - IntroductionTt OwnsqqNoch keine Bewertungen
- Harare Institute of TechnologyDokument9 SeitenHarare Institute of TechnologyKeith Tanaka MagakaNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hitachi Us CTLGDokument369 SeitenHitachi Us CTLGPhạm Đăng DiệnNoch keine Bewertungen
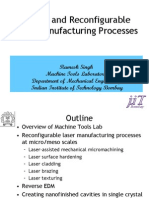
- Ramesh Sing - IIT BombayDokument71 SeitenRamesh Sing - IIT BombayDIPAK VINAYAK SHIRBHATENoch keine Bewertungen
- Agiecharmilles Cut e 350 600 - enDokument28 SeitenAgiecharmilles Cut e 350 600 - enPedro Anastasio SimeonNoch keine Bewertungen
- B SB-160Dokument8 SeitenB SB-160FrengkiNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Adaptadores - BSP - NPTDokument1 SeiteAdaptadores - BSP - NPTJean DiasNoch keine Bewertungen
- Journal of Natural Fibers PDFDokument16 SeitenJournal of Natural Fibers PDFKalusu Raman100% (1)
- GF Machining Solutions Mikron MILL P BrochureDokument40 SeitenGF Machining Solutions Mikron MILL P BrochureAn NguyenNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)