Das könnte Ihnen auch gefallen
- Recurdyn Solver - Theoretical ManualDokument325 SeitenRecurdyn Solver - Theoretical ManualsawamurNoch keine Bewertungen
- Signals-and-Systems - Basics & Formula HandbookDokument19 SeitenSignals-and-Systems - Basics & Formula HandbookKALAIMATHI100% (15)
- Amusnet Seamless Integration Guide v1.17Dokument45 SeitenAmusnet Seamless Integration Guide v1.17Vip3r011Noch keine Bewertungen
- J V Stalin - Works Volume 11: (Jan1928 - March 1929)Dokument424 SeitenJ V Stalin - Works Volume 11: (Jan1928 - March 1929)Communist Party100% (5)
- J V Stalin - Works Volume 11: (Jan1928 - March 1929)Dokument424 SeitenJ V Stalin - Works Volume 11: (Jan1928 - March 1929)Communist Party100% (5)
- MATLAB for Beginners: A Gentle Approach - Revised EditionVon EverandMATLAB for Beginners: A Gentle Approach - Revised EditionBewertung: 3.5 von 5 Sternen3.5/5 (11)
- Print to PDF without novaPDF messageDokument46 SeitenPrint to PDF without novaPDF messageCj Santiago100% (2)
- D72896GC40 - Oracle Solaris 11 System Administration - SG2Dokument430 SeitenD72896GC40 - Oracle Solaris 11 System Administration - SG2Mounir Ben Mohamed100% (2)
- Integer Optimization and its Computation in Emergency ManagementVon EverandInteger Optimization and its Computation in Emergency ManagementNoch keine Bewertungen
- Signal ProjectDokument15 SeitenSignal ProjectMalikAlrahabiNoch keine Bewertungen
- FPGA Implementation of FFT for Embedded SystemsDokument16 SeitenFPGA Implementation of FFT for Embedded SystemsgalaxystarNoch keine Bewertungen
- Notes 1Dokument298 SeitenNotes 1Arunmozhi SinouvassaneNoch keine Bewertungen
- Laboratory 5 - The Convolution IntegralDokument10 SeitenLaboratory 5 - The Convolution IntegralOsama AlqahtaniNoch keine Bewertungen
- Ec3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Dokument41 SeitenEc3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Music LoverNoch keine Bewertungen
- Digital Signal Processing FundamentalsDokument15 SeitenDigital Signal Processing FundamentalsPreetham SaigalNoch keine Bewertungen
- ECE438 - Laboratory 2: Discrete-Time SystemsDokument6 SeitenECE438 - Laboratory 2: Discrete-Time SystemsMusie WeldayNoch keine Bewertungen
- System Modeling & ExamplesDokument16 SeitenSystem Modeling & ExamplesahmdNoch keine Bewertungen
- Signals and Systems NotesDokument168 SeitenSignals and Systems Notesankitkr09Noch keine Bewertungen
- Lab 4Dokument8 SeitenLab 4hamzaNoch keine Bewertungen
- Lecture 2Dokument25 SeitenLecture 2Balaji KannanNoch keine Bewertungen
- EE-232: Signals and Systems Lab 4: Introduction To Complex ExponentialsDokument18 SeitenEE-232: Signals and Systems Lab 4: Introduction To Complex ExponentialsMuhammad Uzair KhanNoch keine Bewertungen
- Lab 8 MatlabDokument13 SeitenLab 8 MatlabSher EjazNoch keine Bewertungen
- University Question Paper Solution on Signals & SystemsDokument54 SeitenUniversity Question Paper Solution on Signals & SystemsJoseph Bezos Musk100% (2)
- DSP Lab Report on Discrete Time SystemsDokument6 SeitenDSP Lab Report on Discrete Time SystemsBharat UdayNoch keine Bewertungen
- Discrete-Time Signal & SystemDokument20 SeitenDiscrete-Time Signal & SystemismailNoch keine Bewertungen
- Discrete Fourier Transform in Excel TutorialDokument10 SeitenDiscrete Fourier Transform in Excel TutorialNumXL ProNoch keine Bewertungen
- Lab1 DSPDokument15 SeitenLab1 DSPAli HassanNoch keine Bewertungen
- Eee-V-Signals and Systems U2Dokument13 SeitenEee-V-Signals and Systems U2Charan V ChanNoch keine Bewertungen
- IEEE Proof Web Version: A Hybrid Robust Non-Homogeneous Finite-Time DifferentiatorDokument7 SeitenIEEE Proof Web Version: A Hybrid Robust Non-Homogeneous Finite-Time Differentiatorlibrian_30005821Noch keine Bewertungen
- Matlab Review PDFDokument19 SeitenMatlab Review PDFMian HusnainNoch keine Bewertungen
- Laboratory Report On Digital Signal Processing Laboratory (EC-3096) Spring - 2023Dokument7 SeitenLaboratory Report On Digital Signal Processing Laboratory (EC-3096) Spring - 2023Anjishnu BhzttacharyaNoch keine Bewertungen
- TC-202 SNSDokument34 SeitenTC-202 SNSchinchouNoch keine Bewertungen
- DSP Laboratory Activity 2Dokument55 SeitenDSP Laboratory Activity 2Ayel Cejas Costiniano100% (1)
- Lecture1-Signals & SystemsDokument20 SeitenLecture1-Signals & SystemsWaqas Akram Gondal100% (1)
- Lab 4-Discrete-Time Filters With FIR Systems Edit1 X 14Dokument12 SeitenLab 4-Discrete-Time Filters With FIR Systems Edit1 X 14Oscar EsparzaNoch keine Bewertungen
- Signals and Systems: Lecture #2: Introduction To SystemsDokument8 SeitenSignals and Systems: Lecture #2: Introduction To Systemsking_hhhNoch keine Bewertungen
- EE370 Lab Experiment 01Dokument6 SeitenEE370 Lab Experiment 01Ayman YounisNoch keine Bewertungen
- DSP Laboratory Activity 2 NewDokument16 SeitenDSP Laboratory Activity 2 NewBradLyBerroyaNoch keine Bewertungen
- Signal & SystemsDokument48 SeitenSignal & SystemsvijaiNoch keine Bewertungen
- DSP Important MaterialDokument209 SeitenDSP Important Materialssabinayaa12Noch keine Bewertungen
- NG - Argument Reduction For Huge Arguments: Good To The Last BitDokument8 SeitenNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorNoch keine Bewertungen
- New DSP ManualDokument35 SeitenNew DSP Manualsnehilj_1Noch keine Bewertungen
- Files-7-Lab ManualsDokument50 SeitenFiles-7-Lab ManualsnannurahNoch keine Bewertungen
- EE-232 Signals and Systems Lab ReportDokument8 SeitenEE-232 Signals and Systems Lab ReportJafar HussainNoch keine Bewertungen
- Sensors and Signals Theory Handbook Week 4 Section 2.1Dokument12 SeitenSensors and Signals Theory Handbook Week 4 Section 2.1jonahNoch keine Bewertungen
- Fundamentals of Multirate Systems in 38 CharactersDokument9 SeitenFundamentals of Multirate Systems in 38 CharactersAejaz AamerNoch keine Bewertungen
- Session 2 Student Text1Dokument8 SeitenSession 2 Student Text1ukiNoch keine Bewertungen
- SCT Digital Signal Processing ItDokument26 SeitenSCT Digital Signal Processing ItSakthiRJNoch keine Bewertungen
- DSP 5Dokument5 SeitenDSP 5kashyap.piyush2003Noch keine Bewertungen
- Digital Signal Processing (DSP) - Jeppiar CollegeDokument22 SeitenDigital Signal Processing (DSP) - Jeppiar CollegeKarthi KeyanNoch keine Bewertungen
- Ec8352-Signals and SystemsDokument13 SeitenEc8352-Signals and Systemsazhagank28062003Noch keine Bewertungen
- KL University, Vaddeswaram, Dept. of Ece B. Tech (All Branches), Iind Year, Sem-1 Test-1 Solutions, Signal Processing-13-Es205 Max Marks 30Dokument6 SeitenKL University, Vaddeswaram, Dept. of Ece B. Tech (All Branches), Iind Year, Sem-1 Test-1 Solutions, Signal Processing-13-Es205 Max Marks 30Sai RanadheerNoch keine Bewertungen
- First Problem Assignment: EE603 - DSP and Its ApplicationsDokument3 SeitenFirst Problem Assignment: EE603 - DSP and Its ApplicationsRahul CPNoch keine Bewertungen
- CH 05Dokument31 SeitenCH 05KavunNoch keine Bewertungen
- Chapter 2 - Evolving Fuzzy SystemsDokument67 SeitenChapter 2 - Evolving Fuzzy SystemsDung Quoc VanNoch keine Bewertungen
- EE 395 Digital Signal ProcessingDokument73 SeitenEE 395 Digital Signal ProcessingSaqib RiazNoch keine Bewertungen
- HST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingDokument3 SeitenHST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingShafayet UddinNoch keine Bewertungen
- Lab1FA11 PDFDokument11 SeitenLab1FA11 PDFaxecaleverNoch keine Bewertungen
- EGR214B1 19 16LSp1Dokument19 SeitenEGR214B1 19 16LSp1sultanNoch keine Bewertungen
- Some Case Studies on Signal, Audio and Image Processing Using MatlabVon EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNoch keine Bewertungen
- Reading Group PDFDokument94 SeitenReading Group PDFjoe.kurina3194Noch keine Bewertungen
- Lecture3 - Win14 Ee 534Dokument16 SeitenLecture3 - Win14 Ee 534joe.kurina3194Noch keine Bewertungen
- 2008 10 09-Ece612-L12Dokument62 Seiten2008 10 09-Ece612-L12joe.kurina3194Noch keine Bewertungen
- EE518 PMP Digital Signal Processing Homework 8Dokument2 SeitenEE518 PMP Digital Signal Processing Homework 8joe.kurina31940% (1)
- Week 1 Ee518 Winter 2014Dokument19 SeitenWeek 1 Ee518 Winter 2014joe.kurina3194Noch keine Bewertungen
- BEE 433 Analog Circuit Design Problem Set #6 Solution Problem - 1: Franco 6.6Dokument3 SeitenBEE 433 Analog Circuit Design Problem Set #6 Solution Problem - 1: Franco 6.6joe.kurina3194Noch keine Bewertungen
- Bolshevism and Stalinism in The Epoch of Imperialist World War and Proletarian Revolution. Urgeschichte. (2000)Dokument237 SeitenBolshevism and Stalinism in The Epoch of Imperialist World War and Proletarian Revolution. Urgeschichte. (2000)joe.kurina3194Noch keine Bewertungen
- Dechassa - Retta - Lemma - 3189815 - 22577354 - BEE 332# Due Nov 2 From Abraham.aDokument33 SeitenDechassa - Retta - Lemma - 3189815 - 22577354 - BEE 332# Due Nov 2 From Abraham.ajoe.kurina3194Noch keine Bewertungen
- Applied Math 582 Homework 1Dokument1 SeiteApplied Math 582 Homework 1joe.kurina3194Noch keine Bewertungen
- IH PolyluxMarx Engl WEBDokument140 SeitenIH PolyluxMarx Engl WEBjoe.kurina3194Noch keine Bewertungen
- Armed Joy by Alfredo M. BonannoDokument37 SeitenArmed Joy by Alfredo M. BonannoRebel MouseNoch keine Bewertungen
- 10ME64 FEM Lesson Plan (Student)Dokument9 Seiten10ME64 FEM Lesson Plan (Student)PavanKumarNNoch keine Bewertungen
- Columbia 1987-02-25 0001Dokument11 SeitenColumbia 1987-02-25 0001Becket AdamsNoch keine Bewertungen
- Asignment 01Dokument2 SeitenAsignment 01Thục ĐoanNoch keine Bewertungen
- 2016-Db-Nigel Bayliss-The Oracle Optimizer - Upgrading Without Pain-PraesentationDokument64 Seiten2016-Db-Nigel Bayliss-The Oracle Optimizer - Upgrading Without Pain-Praesentationsmishra_97Noch keine Bewertungen
- 15 - 20 - Manual Pit & Pdit YakogawaDokument61 Seiten15 - 20 - Manual Pit & Pdit YakogawaWilmar Ortiz MoraNoch keine Bewertungen
- Adina LipaiDokument7 SeitenAdina LipaiAdriana CalinNoch keine Bewertungen
- A Teen Trader FTR Indicator: DisclosureDokument14 SeitenA Teen Trader FTR Indicator: DisclosureMohamad ehteshamNoch keine Bewertungen
- Java Programming Exam QuestionsDokument3 SeitenJava Programming Exam QuestionswishpondNoch keine Bewertungen
- Release Notes Intel® Proset/Wireless Software 22.50.1: Supported Operating SystemsDokument3 SeitenRelease Notes Intel® Proset/Wireless Software 22.50.1: Supported Operating SystemsSelçuk AlacalıNoch keine Bewertungen
- Abbreviations of Names of References Used in Mathematical ReviewsDokument32 SeitenAbbreviations of Names of References Used in Mathematical ReviewsSanti KunduNoch keine Bewertungen
- Falcon Iii® Rf-7800V-Hh: VHF Networking HandheldDokument2 SeitenFalcon Iii® Rf-7800V-Hh: VHF Networking HandheldNicoleta NiţăNoch keine Bewertungen
- Using Webcorp in The Classroom For Building Specialized DictionariesDokument13 SeitenUsing Webcorp in The Classroom For Building Specialized DictionariesNatalei KublerNoch keine Bewertungen
- A Self-help App for Syrian Refugees with PTSDDokument51 SeitenA Self-help App for Syrian Refugees with PTSDMiguel SobredoNoch keine Bewertungen
- CodetantraDokument51 SeitenCodetantrapratik ghoshNoch keine Bewertungen
- Akhilesh - 00318002719 - SynchronizationDokument7 SeitenAkhilesh - 00318002719 - SynchronizationAman NagarkotiNoch keine Bewertungen
- Modelman PDFDokument72 SeitenModelman PDFCarlos CamachoNoch keine Bewertungen
- VG278 Series LCD Monitor User GuideDokument24 SeitenVG278 Series LCD Monitor User GuideEdsel LoquillanoNoch keine Bewertungen
- Transmedia Marketing PlaybookDokument28 SeitenTransmedia Marketing PlaybookCommLeadNoch keine Bewertungen
- Installation Guide of K Tag 7003 ktm100 213 SoftwareDokument14 SeitenInstallation Guide of K Tag 7003 ktm100 213 SoftwareBrahim SalahNoch keine Bewertungen
- Volcano Rabbit Videos, Photos and Facts - Romerolagus Diazi - ArkiveDokument4 SeitenVolcano Rabbit Videos, Photos and Facts - Romerolagus Diazi - ArkiveFer OssNoch keine Bewertungen
- Requirements Specification and Analysis IIDokument35 SeitenRequirements Specification and Analysis IIayushNoch keine Bewertungen
- Banking SystemDokument68 SeitenBanking SystemvermalabNoch keine Bewertungen
- Dijkstra's, Kruskals and Floyd-Warshall AlgorithmsDokument38 SeitenDijkstra's, Kruskals and Floyd-Warshall AlgorithmsRajan JaiprakashNoch keine Bewertungen
- I, Robot - Future (Will)Dokument2 SeitenI, Robot - Future (Will)CarolinaDeCastroCerviNoch keine Bewertungen
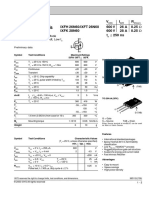
- Hiperfet Power Mosfets: V I R Ixfh 26N60/Ixft 26N60 600 V 26 A 0.25 Ixfk 28N60 600 V 28 A 0.25 T 250 NsDokument2 SeitenHiperfet Power Mosfets: V I R Ixfh 26N60/Ixft 26N60 600 V 26 A 0.25 Ixfk 28N60 600 V 28 A 0.25 T 250 NsAmirNoch keine Bewertungen
- Red Hat Enterprise Linux 5 Installation Guide Es ESDokument288 SeitenRed Hat Enterprise Linux 5 Installation Guide Es EScompas87Noch keine Bewertungen