Das könnte Ihnen auch gefallen
- The Shoulder: Theory & Practice: Jeremy LewisDokument3 SeitenThe Shoulder: Theory & Practice: Jeremy Lewisparakram0% (1)
- Applied Functional Science Afs PPDokument9 SeitenApplied Functional Science Afs PPapi-414772091Noch keine Bewertungen
- Phasic Activity of Intrinsic Muscles of The FootDokument14 SeitenPhasic Activity of Intrinsic Muscles of The FootpetcudanielNoch keine Bewertungen
- Human Walking RoseDokument248 SeitenHuman Walking RosePablo CruzNoch keine Bewertungen
- OnBaseU Pitching Manual NotesDokument5 SeitenOnBaseU Pitching Manual Noteslw98Noch keine Bewertungen
- Balance and Vestibular Rehabilitation KitDokument9 SeitenBalance and Vestibular Rehabilitation Kitmsnobody8Noch keine Bewertungen
- Kinetic ChainsDokument5 SeitenKinetic ChainsYermia RashaquatNoch keine Bewertungen
- CLINICAL REHABILITATION Pavel KolarDokument73 SeitenCLINICAL REHABILITATION Pavel KolarMario IličićNoch keine Bewertungen
- Pattern BlocksDokument29 SeitenPattern BlocksErica Arthur Auguste100% (10)
- Adaptability of Human Gait: Implications for the Control of LocomotionVon EverandAdaptability of Human Gait: Implications for the Control of LocomotionNoch keine Bewertungen
- Overhead Throwing: Biomechanics and PathologyDokument7 SeitenOverhead Throwing: Biomechanics and Pathologyrapannika100% (1)
- Plug in GaitDokument70 SeitenPlug in GaitJobin VargheseNoch keine Bewertungen
- Lab: Motor Pattern Assessment Screening & Diagnosis: Albert J Kozar DO, FAOASM, RMSKDokument72 SeitenLab: Motor Pattern Assessment Screening & Diagnosis: Albert J Kozar DO, FAOASM, RMSKRukaphuongNoch keine Bewertungen
- PRI Integration For Geriatrics - Complete FileDokument159 SeitenPRI Integration For Geriatrics - Complete Filezhang yangNoch keine Bewertungen
- Chapter 5 Human Movement ScienceDokument30 SeitenChapter 5 Human Movement ScienceVu Van Cuong100% (1)
- (OS 203) Basic Biomechanics of Musculoskeletal System PDFDokument3 Seiten(OS 203) Basic Biomechanics of Musculoskeletal System PDFSham David PTNoch keine Bewertungen
- BiomechanicsDokument17 SeitenBiomechanicss_chandrubioNoch keine Bewertungen
- The Helical Ventricular Myocardial Band of Torrent-GuaspDokument5 SeitenThe Helical Ventricular Myocardial Band of Torrent-GuaspTeaKovacevicNoch keine Bewertungen
- The Masculoskeletal System & Tissue MechanicsDokument29 SeitenThe Masculoskeletal System & Tissue MechanicsEdara Rajesh KumarNoch keine Bewertungen
- Kozar ScienceOfMotorControlLectureDokument114 SeitenKozar ScienceOfMotorControlLectureMari PaoNoch keine Bewertungen
- Kaltenborn Evjenth Concept of OMTDokument34 SeitenKaltenborn Evjenth Concept of OMTJaan100% (1)
- LowBackPain PDFDokument217 SeitenLowBackPain PDFBugis MuslimNoch keine Bewertungen
- Clinical Evaluation of Scapular DysfunctionDokument6 SeitenClinical Evaluation of Scapular DysfunctionRudolfGerNoch keine Bewertungen
- The Convex Concave Rule and The Lever LawDokument4 SeitenThe Convex Concave Rule and The Lever LawOwais KhanNoch keine Bewertungen
- The Momentum of Perspective by Gray CookDokument6 SeitenThe Momentum of Perspective by Gray CookBiochem1100% (1)
- Turocy StainCounterstrain LabPATS06ADokument53 SeitenTurocy StainCounterstrain LabPATS06Awillone08Noch keine Bewertungen
- Anthropometry The - Individual - and - The - Population Cambridge - Studies - in - Biological - and - Evolutionary - Anthropology - PDFDokument227 SeitenAnthropometry The - Individual - and - The - Population Cambridge - Studies - in - Biological - and - Evolutionary - Anthropology - PDFsln_rjNoch keine Bewertungen
- Kibler Et Al 2012 Scapula Dyskinesis and Its Relation To Shoulder Injury PDFDokument9 SeitenKibler Et Al 2012 Scapula Dyskinesis and Its Relation To Shoulder Injury PDFPamela DíazNoch keine Bewertungen
- A Proposed Evidence-Based Shoulder Special Testing Examination Algorithm - Clinical Utility Based On A Systematic Review of The LiteratureDokument14 SeitenA Proposed Evidence-Based Shoulder Special Testing Examination Algorithm - Clinical Utility Based On A Systematic Review of The LiteratureAfonso MacedoNoch keine Bewertungen
- PRI Integ For Pediatrics (Nov 2020) - Complete ManualDokument208 SeitenPRI Integ For Pediatrics (Nov 2020) - Complete Manualzhang yangNoch keine Bewertungen
- Biomechanics NotesDokument5 SeitenBiomechanics Notesjttizzle1995Noch keine Bewertungen
- Functional Postural-Stabilization Tests AccordingDokument58 SeitenFunctional Postural-Stabilization Tests AccordingwladjaNoch keine Bewertungen
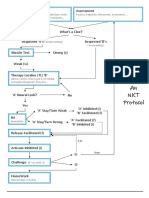
- NKT FlowChart - PDF Version 1 PDFDokument2 SeitenNKT FlowChart - PDF Version 1 PDFJay SarkNoch keine Bewertungen
- Gait Analysis 16th JuneDokument40 SeitenGait Analysis 16th JuneNaveen BharatNoch keine Bewertungen
- The Neutral Spine PrincipleDokument12 SeitenThe Neutral Spine Principlesabrina100% (1)
- PunctumFix Liebenson SundayLectureDokument17 SeitenPunctumFix Liebenson SundayLecturepfi_jenNoch keine Bewertungen
- Bobath For Musculoskeletal Problem Palembang Online 2020Dokument128 SeitenBobath For Musculoskeletal Problem Palembang Online 2020fisioterapi rsph100% (1)
- Joint Mobilization LectureDokument58 SeitenJoint Mobilization LectureRahul ChhatlaniNoch keine Bewertungen
- Bogduk 2009Dokument3 SeitenBogduk 2009Borys100% (1)
- 1 Reviews Evidences HandoutDokument25 Seiten1 Reviews Evidences Handoutsefhilla putriNoch keine Bewertungen
- A Kinetic Chain Approach For Shoulder RehabDokument9 SeitenA Kinetic Chain Approach For Shoulder RehabRicardo QuezadaNoch keine Bewertungen
- 2 Biomechanics of The ShoulderDokument47 Seiten2 Biomechanics of The ShoulderDaniel PereiraNoch keine Bewertungen
- Cervical Spine Stomatognatic System and CraniofacialDokument40 SeitenCervical Spine Stomatognatic System and CraniofacialDenise MathreNoch keine Bewertungen
- Biomechanics WorksheetDokument3 SeitenBiomechanics WorksheetfsdjfsdkjfsNoch keine Bewertungen
- PathomechanicsDokument8 SeitenPathomechanicsMike B AndersonNoch keine Bewertungen
- Sense Organ:vestibular OrganDokument55 SeitenSense Organ:vestibular OrganivanNoch keine Bewertungen
- Lec 6 AcompareDokument2 SeitenLec 6 AcomparematshNoch keine Bewertungen
- Ijspt-Biomechanics and Pathomechanics of The Patellofemoral JointDokument11 SeitenIjspt-Biomechanics and Pathomechanics of The Patellofemoral JointDevi MigiekaNoch keine Bewertungen
- Subacromial Impingement Syndrome and Rotator Cuff Tendinopathy: The Dilemma of DiagnosisDokument4 SeitenSubacromial Impingement Syndrome and Rotator Cuff Tendinopathy: The Dilemma of DiagnosisTomBramboNoch keine Bewertungen
- 1995 Spinal Stabilisation, 2. Limiting Factors To End-Range Motion in The Lumbar SpineDokument9 Seiten1995 Spinal Stabilisation, 2. Limiting Factors To End-Range Motion in The Lumbar SpineAni Fran SolarNoch keine Bewertungen
- Biomechanics 222Dokument57 SeitenBiomechanics 222sjanormanNoch keine Bewertungen
- Efficacy of Neck Stabilization Exercises For Neck Pain: A Randomized Controlled StudyDokument6 SeitenEfficacy of Neck Stabilization Exercises For Neck Pain: A Randomized Controlled StudyAnonymous mWAaDZmlJwNoch keine Bewertungen
- 268 Full PDFDokument1 Seite268 Full PDFRamkeshmaraviNoch keine Bewertungen
- Biomechanics of Lumbar SpineDokument50 SeitenBiomechanics of Lumbar SpineRitvik Khurana100% (1)
- Neuro DynamicsDokument26 SeitenNeuro DynamicsRahul ChhatlaniNoch keine Bewertungen
- HydrotherapyDokument21 SeitenHydrotherapy7e9oo90% (1)
- Application of Fascial Manipulation Technique in Chronic Shoulder Pain Ok PDFDokument8 SeitenApplication of Fascial Manipulation Technique in Chronic Shoulder Pain Ok PDFBruno DiasNoch keine Bewertungen
- Bio Mechanics of JumpingDokument4 SeitenBio Mechanics of JumpingcolumbuNoch keine Bewertungen
- History of Spine BiomechanicsDokument13 SeitenHistory of Spine BiomechanicsLeopoldo AguayoNoch keine Bewertungen
- Clinical Biomechanics in Human Locomotion: Origins and PrinciplesVon EverandClinical Biomechanics in Human Locomotion: Origins and PrinciplesNoch keine Bewertungen
- We Care About Feet!: 1st English EditionDokument32 SeitenWe Care About Feet!: 1st English EditionpetcudanielNoch keine Bewertungen
- Essential Information For Designers: This Chapter CoversDokument28 SeitenEssential Information For Designers: This Chapter Coverspetcudaniel33% (3)
- FootwearDokument10 SeitenFootwearpetcudanielNoch keine Bewertungen
- FootwearDokument10 SeitenFootwearpetcudanielNoch keine Bewertungen
- Pathomechanics of StanceDokument9 SeitenPathomechanics of StancepetcudanielNoch keine Bewertungen
- Corrective Shoes and InsertsDokument3 SeitenCorrective Shoes and InsertspetcudanielNoch keine Bewertungen
- Final Programme CORTEPDokument11 SeitenFinal Programme CORTEPpetcudanielNoch keine Bewertungen
- Dynamic Structure of The Human Foot Herbert and ElftmanDokument10 SeitenDynamic Structure of The Human Foot Herbert and ElftmantriptykhannaNoch keine Bewertungen
- Plantar AponeurosisDokument13 SeitenPlantar AponeurosispetcudanielNoch keine Bewertungen
- Pes Cavus and Pes PlanusDokument7 SeitenPes Cavus and Pes PlanuspetcudanielNoch keine Bewertungen
- Locomotor Biomechanics and Pathomecanics A ReviewDokument8 SeitenLocomotor Biomechanics and Pathomecanics A ReviewpetcudanielNoch keine Bewertungen
- Shoe Congenital ClubfootDokument10 SeitenShoe Congenital ClubfootpetcudanielNoch keine Bewertungen
- Flatfoot Deformity An OverviewDokument9 SeitenFlatfoot Deformity An OverviewpetcudanielNoch keine Bewertungen
- The EVOLUTION of The HUMAN FOOTDokument12 SeitenThe EVOLUTION of The HUMAN FOOTpetcudanielNoch keine Bewertungen
- Action of The Subtalar and Ankle-Joint Complex During The Stance Phase of WalkingDokument24 SeitenAction of The Subtalar and Ankle-Joint Complex During The Stance Phase of WalkingpetcudanielNoch keine Bewertungen
- 3 Reliability and ValidityDokument38 Seiten3 Reliability and ValidityNoor AimanNoch keine Bewertungen
- Vector (Butterfly) Diagrams For Osteoarthritic Gait A Preliminary Report - KhodadadehDokument5 SeitenVector (Butterfly) Diagrams For Osteoarthritic Gait A Preliminary Report - KhodadadehpetcudanielNoch keine Bewertungen
- Most Important Electrical Engineering NTS Based Short QuestionsDokument63 SeitenMost Important Electrical Engineering NTS Based Short QuestionsnageenNoch keine Bewertungen
- Big BazaarDokument6 SeitenBig BazaaraniketsangodcarNoch keine Bewertungen
- CAST Optical Smoke Detector: Part NoDokument3 SeitenCAST Optical Smoke Detector: Part NoAnis TantoushNoch keine Bewertungen
- ENT Head and Neck ExamDokument21 SeitenENT Head and Neck ExamvickyNoch keine Bewertungen
- Lesson 3.3 Inside An AtomDokument42 SeitenLesson 3.3 Inside An AtomReign CallosNoch keine Bewertungen
- Fosroc Conplast SP335: Multi-Range Water Reducing AdmixtureDokument2 SeitenFosroc Conplast SP335: Multi-Range Water Reducing AdmixtureVincent JavateNoch keine Bewertungen
- Jurnal Kasus Etikolegal Dalam Praktik KebidananDokument13 SeitenJurnal Kasus Etikolegal Dalam Praktik KebidananErni AnggieNoch keine Bewertungen
- Exam1 Key JMB s06Dokument13 SeitenExam1 Key JMB s06Steve DangNoch keine Bewertungen
- BIS Ventilation Brochure enDokument16 SeitenBIS Ventilation Brochure enBruno SantosNoch keine Bewertungen
- Magicad Heating&Piping and Ventilation Version 2011.11: User'S GuideDokument285 SeitenMagicad Heating&Piping and Ventilation Version 2011.11: User'S GuideCalin CalinNoch keine Bewertungen
- Convecc Ao Forc Ada Externa: Vicente Luiz ScalonDokument18 SeitenConvecc Ao Forc Ada Externa: Vicente Luiz ScalonMaria VitóriaNoch keine Bewertungen
- K.golden Flower MeditationDokument6 SeitenK.golden Flower Meditationamjr1001Noch keine Bewertungen
- Exp 4 Centrifugal CompressorDokument11 SeitenExp 4 Centrifugal CompressorFaris HamirNoch keine Bewertungen
- AGRO 101 Principles of Agronomy - Acharya NG Ranga Agricultural PDFDokument133 SeitenAGRO 101 Principles of Agronomy - Acharya NG Ranga Agricultural PDFShalini Singh100% (1)
- MAUS Catalogue PDFDokument10 SeitenMAUS Catalogue PDFCarolina Garcés MoralesNoch keine Bewertungen
- Formula Sheet Pre-MidDokument4 SeitenFormula Sheet Pre-MidUzair KhanNoch keine Bewertungen
- Ashin Tejaniya: Questions & Answers WithDokument241 SeitenAshin Tejaniya: Questions & Answers WithharioNoch keine Bewertungen
- Grades 4-10: Search Jobs in IndiaDokument2 SeitenGrades 4-10: Search Jobs in IndiaMD AKIL AHMEDNoch keine Bewertungen
- Punjab National BankDokument4 SeitenPunjab National BankShubham RajNoch keine Bewertungen
- LPG PropertiesDokument2 SeitenLPG Propertiesvvk557Noch keine Bewertungen
- Static Fluid: It Is Mass Per Unit Volume at Certain TemperatureDokument11 SeitenStatic Fluid: It Is Mass Per Unit Volume at Certain TemperatureMohamed El-GoharyNoch keine Bewertungen
- POFL Unit 1 Status QUO pp.1-37Dokument38 SeitenPOFL Unit 1 Status QUO pp.1-37AruNoch keine Bewertungen
- Water Distiller - ManualDokument2 SeitenWater Distiller - ManualSanjeevi JagadishNoch keine Bewertungen
- 01 05 Justin Capouch CBI PresentationDokument18 Seiten01 05 Justin Capouch CBI PresentationprabhuarunkumarNoch keine Bewertungen
- JSA - Bolt TensioningDokument5 SeitenJSA - Bolt TensioningRaju KhalifaNoch keine Bewertungen
- Presentation On Heavy Engineering Corporation LimitedDokument20 SeitenPresentation On Heavy Engineering Corporation LimitedSandeepRajNoch keine Bewertungen
- UNIT-5 International Dimensions To Industrial Relations: ObjectivesDokument27 SeitenUNIT-5 International Dimensions To Industrial Relations: ObjectivesManish DwivediNoch keine Bewertungen
- Scooty PepDokument1 SeiteScooty PepYASHNoch keine Bewertungen
- 2nd Comprehensive ExamDokument15 Seiten2nd Comprehensive ExamLoala SMDNoch keine Bewertungen
- Expository Cause and Effect OUTLINEDokument2 SeitenExpository Cause and Effect OUTLINEAutoDefenceNoch keine Bewertungen