Das könnte Ihnen auch gefallen
- Generalized Automatic and Augmented Manual Flight Control: Berlin Technical University Colloquium May 19, 2006Dokument73 SeitenGeneralized Automatic and Augmented Manual Flight Control: Berlin Technical University Colloquium May 19, 2006Erick LeonardoNoch keine Bewertungen
- Pacific Simulators PS4.5 Brochure - 2016 PDFDokument6 SeitenPacific Simulators PS4.5 Brochure - 2016 PDFCapt_AayushJainNoch keine Bewertungen
- PacSim Certified PS4.5 Brochure EmailDokument6 SeitenPacSim Certified PS4.5 Brochure EmailWilson Adonay Ramos RamosNoch keine Bewertungen
- Fly-By-Wire (FBW) : Pratejas Tomar B. Tech (AE) : 8 SemesterDokument13 SeitenFly-By-Wire (FBW) : Pratejas Tomar B. Tech (AE) : 8 SemesterSidhartha MauryaNoch keine Bewertungen
- Defining The Avionics Systems RequirementsDokument45 SeitenDefining The Avionics Systems RequirementsH R VALANoch keine Bewertungen
- Lecture-1 AvionicsDokument58 SeitenLecture-1 Avionicskishorekumar sandanNoch keine Bewertungen
- Fundamentals of Fly-By-Wire Augmented Manual ControlDokument24 SeitenFundamentals of Fly-By-Wire Augmented Manual ControlcmpmarinhoNoch keine Bewertungen
- Digital Avionics II: Class Presentation - CP 2Dokument22 SeitenDigital Avionics II: Class Presentation - CP 2M S PrasadNoch keine Bewertungen
- Av-UNIT - IIIDokument93 SeitenAv-UNIT - IIINagaraja BhagavNoch keine Bewertungen
- 00 Aircraft Flight Manual Metro IIIDokument32 Seiten00 Aircraft Flight Manual Metro IIIManuel Villalba33% (3)
- B777 FCOM Summery Rev 35Dokument24 SeitenB777 FCOM Summery Rev 35mirzasamirNoch keine Bewertungen
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsVon EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNoch keine Bewertungen
- Aircraft CTRL SystemsDokument182 SeitenAircraft CTRL SystemslhomssiNoch keine Bewertungen
- 20flight Management SystemDokument12 Seiten20flight Management SystemAdil KhNoch keine Bewertungen
- 20flight Management SystemDokument12 Seiten20flight Management SystemMirnesa SelimovićNoch keine Bewertungen
- Unit - I Aircraft Control SystemsDokument73 SeitenUnit - I Aircraft Control SystemsVishnu Kiran100% (1)
- Aircraft Control Systems, Basic Construction, Wing and Fuselage ConstructionDokument146 SeitenAircraft Control Systems, Basic Construction, Wing and Fuselage ConstructionTAMILSELVAM NALLUSAMYNoch keine Bewertungen
- LN - Flight Management SystemDokument9 SeitenLN - Flight Management SystemM S PrasadNoch keine Bewertungen
- Turbomachinery Controls (Plantpax)Dokument52 SeitenTurbomachinery Controls (Plantpax)Ikhtiander Ikhtiander100% (2)
- Purdue University, USA - Sullivan Flight TestingDokument65 SeitenPurdue University, USA - Sullivan Flight TestingbarkeiNoch keine Bewertungen
- Lecture 1 - What Is AutomationDokument14 SeitenLecture 1 - What Is AutomationAung Naing OoNoch keine Bewertungen
- Auto PilotDokument5 SeitenAuto PilotPrabhu Mani RathinamNoch keine Bewertungen
- Lecture 3-Air Traffic Control (ATC) TowerDokument25 SeitenLecture 3-Air Traffic Control (ATC) Towerzuliana100% (2)
- Aircraft Maintenance MGTDokument15 SeitenAircraft Maintenance MGTAdrian ArasuNoch keine Bewertungen
- Aircraft Hydraulic System DesignDokument27 SeitenAircraft Hydraulic System Designa1rm4n1100% (5)
- Lecture 1 - What Is Automation (Printed)Dokument12 SeitenLecture 1 - What Is Automation (Printed)Aung Naing OoNoch keine Bewertungen
- Automatic Flight ControlDokument24 SeitenAutomatic Flight ControlSade Zamy100% (1)
- Flight Control Laws: (/index - Php/main - Page)Dokument14 SeitenFlight Control Laws: (/index - Php/main - Page)Jivendra KumarNoch keine Bewertungen
- Module 4 A Systemic ApproachDokument44 SeitenModule 4 A Systemic Approachwibowo imamNoch keine Bewertungen
- 5.15 Typical Aircraft Instrument SystemsDokument44 Seiten5.15 Typical Aircraft Instrument Systemssyed kazmi100% (1)
- FADECDokument20 SeitenFADECprasannabalaji0% (1)
- Aero L-159B Czech Jet Trainer AircraftDokument16 SeitenAero L-159B Czech Jet Trainer AircraftSilentistics100% (2)
- Aeronautical Development Establishment (ADE) (DRDO Institute)Dokument9 SeitenAeronautical Development Establishment (ADE) (DRDO Institute)LuptongaNoch keine Bewertungen
- What'S New in 146 Professional For Microsoft Flight Simulator?Dokument5 SeitenWhat'S New in 146 Professional For Microsoft Flight Simulator?Junhy Bandeira CassandraNoch keine Bewertungen
- Evolution of Powered Flight Controls SeminarDokument31 SeitenEvolution of Powered Flight Controls Seminarsudhakar2010Noch keine Bewertungen
- CAR 66 Module 5.15 Typical Aircraft Instrument SystemsDokument44 SeitenCAR 66 Module 5.15 Typical Aircraft Instrument Systemspontoo100% (1)
- DCS LectureDokument80 SeitenDCS LectureShashankRajoria100% (3)
- Aero L-159A Czech Jet Combat AircraftDokument16 SeitenAero L-159A Czech Jet Combat AircraftSilentistics100% (1)
- Controls and Instrumentation - CompressedDokument12 SeitenControls and Instrumentation - CompressedCricri CriNoch keine Bewertungen
- Surge ProtectedDokument42 SeitenSurge ProtectedRaul Roque Yujra100% (2)
- Flight Control LawsDokument9 SeitenFlight Control LawsSreeja SunderNoch keine Bewertungen
- Airport Lighting Control and Monitoring System-ALCMSDokument4 SeitenAirport Lighting Control and Monitoring System-ALCMSpoketupiNoch keine Bewertungen
- Avinocs Int I Two MarksDokument3 SeitenAvinocs Int I Two MarksNaga SuryaNoch keine Bewertungen
- Brochure Aerospace Engineering ServicesDokument5 SeitenBrochure Aerospace Engineering ServicesSovi SoviNoch keine Bewertungen
- 777 Design ArticleDokument16 Seiten777 Design Articlesureshams100% (1)
- 146 Professional MSFS New Features UpdateDokument6 Seiten146 Professional MSFS New Features UpdateАндрей ТарановскийNoch keine Bewertungen
- Flight Control LawsDokument8 SeitenFlight Control LawsuttamkavitaNoch keine Bewertungen
- Automation in Manufacturing Unit-1Dokument58 SeitenAutomation in Manufacturing Unit-1Krishna MurthyNoch keine Bewertungen
- Flight Control Surfaces 2Dokument10 SeitenFlight Control Surfaces 2walterNoch keine Bewertungen
- Lvo Presentation EtfDokument76 SeitenLvo Presentation Etfboban100% (2)
- Aircraft HydraulicsDokument25 SeitenAircraft HydraulicsAnand100% (1)
- Aircraft Control SystemsDokument97 SeitenAircraft Control SystemsSanjay Singh100% (2)
- ETOPS - Extended Twinned Engine OperationsDokument2 SeitenETOPS - Extended Twinned Engine OperationsExploit DévelopperNoch keine Bewertungen
- A380 Flight Deck and Systems Briefing For PilotsDokument34 SeitenA380 Flight Deck and Systems Briefing For PilotsZufayri Peyi100% (1)
- Avionics NotesDokument2 SeitenAvionics NotesJewel Christian PuseNoch keine Bewertungen
- Introduction to Fly-By-Wire Flight Control SystemsVon EverandIntroduction to Fly-By-Wire Flight Control SystemsBewertung: 5 von 5 Sternen5/5 (1)
- 737 Performance Reference Handbook - EASA EditionVon Everand737 Performance Reference Handbook - EASA EditionBewertung: 4.5 von 5 Sternen4.5/5 (3)
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveVon EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveBewertung: 5 von 5 Sternen5/5 (2)
- The Pilot's Guide to The Airline CockpitVon EverandThe Pilot's Guide to The Airline CockpitBewertung: 5 von 5 Sternen5/5 (1)
- Performance Data ATR72-500Dokument79 SeitenPerformance Data ATR72-500Siraphob SantironnarongNoch keine Bewertungen
- Super PresentationDokument48 SeitenSuper PresentationM.a. RommNoch keine Bewertungen
- Formation Pilot GuideDokument97 SeitenFormation Pilot GuideSiraphob Santironnarong100% (1)
- PMDG 737NGX IntroductionDokument134 SeitenPMDG 737NGX IntroductionSiraphob SantironnarongNoch keine Bewertungen
- PMDG 737NGX IntroductionDokument134 SeitenPMDG 737NGX IntroductionSiraphob SantironnarongNoch keine Bewertungen
- Trident ManualDokument3 SeitenTrident ManualrodolfoaznarNoch keine Bewertungen
- All Weather Operations Cat IiDokument172 SeitenAll Weather Operations Cat Iioswaldo venegas100% (1)
- Boeing 737 Limitations (B737.org - Uk)Dokument9 SeitenBoeing 737 Limitations (B737.org - Uk)rajmercury100% (1)
- Boeing 737 NG - QuestionaireDokument150 SeitenBoeing 737 NG - QuestionairemarkehlbrNoch keine Bewertungen
- Fly The Maddog X Operations Manual Volume 2Dokument177 SeitenFly The Maddog X Operations Manual Volume 2midas33Noch keine Bewertungen
- Module 13Dokument70 SeitenModule 13adi100% (2)
- Autoland and AutoThrottleDokument2 SeitenAutoland and AutoThrottleadrian hNoch keine Bewertungen
- Auto Matic Flight Controll 4-2Dokument141 SeitenAuto Matic Flight Controll 4-2tarakae04Noch keine Bewertungen
- Master Minimum Equipment List: U.S. Department of Transportation Federal Aviation AdministrationDokument199 SeitenMaster Minimum Equipment List: U.S. Department of Transportation Federal Aviation AdministrationOmar MalladNoch keine Bewertungen
- Checklist & Procedures: PMDG Boeing 737NGDokument4 SeitenChecklist & Procedures: PMDG Boeing 737NGMatheus MinattoNoch keine Bewertungen
- Module 13Dokument119 SeitenModule 13Zbor ZborNoch keine Bewertungen
- A346QRHDokument196 SeitenA346QRHGraham WaterfieldNoch keine Bewertungen
- Sop A321 R06 27may15 TR01 02jul15Dokument220 SeitenSop A321 R06 27may15 TR01 02jul15maxim nghiaNoch keine Bewertungen
- Kal CalloutsDokument5 SeitenKal CalloutsPeter JacobssonNoch keine Bewertungen
- Airbus Fma TamDokument11 SeitenAirbus Fma TamMarcos Braga100% (2)
- 16 CS-AWO All Weather OperationsDokument65 Seiten16 CS-AWO All Weather OperationsLouis_Marquis__2873Noch keine Bewertungen
- Unofficial A320 SimulatorDokument23 SeitenUnofficial A320 SimulatorAmirAli MohebbiNoch keine Bewertungen
- GF17 Inst TRNDokument22 SeitenGF17 Inst TRNHani BoudiafNoch keine Bewertungen
- b787mrg ProfilesDokument5 Seitenb787mrg ProfilesMohammed AlsbeayNoch keine Bewertungen
- AirbusCallouts (PDF - Io)Dokument24 SeitenAirbusCallouts (PDF - Io)Army9898Noch keine Bewertungen
- Recurrent Training: Boeing - 767 Systems ReviewDokument36 SeitenRecurrent Training: Boeing - 767 Systems ReviewевгенийNoch keine Bewertungen
- Flight Mode Annunciator: Auto Thrust Mode Vertical Mode Lateral Mode Approach Capabilities Auto Flight StatusDokument10 SeitenFlight Mode Annunciator: Auto Thrust Mode Vertical Mode Lateral Mode Approach Capabilities Auto Flight StatusAndréslo MontoyaNoch keine Bewertungen
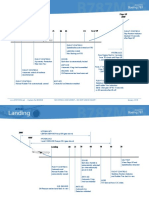
- Landing PDFDokument16 SeitenLanding PDFThar LattNoch keine Bewertungen
- AB 320 FactsDokument2 SeitenAB 320 FactsvinayNoch keine Bewertungen
- b787mrg ProfilesDokument5 Seitenb787mrg ProfilesBobi Guau100% (1)
- AviationDokument347 SeitenAviationSyed Salman UddinNoch keine Bewertungen
- Zibo 737-800 Concise ChecklistDokument2 SeitenZibo 737-800 Concise ChecklistMatador DoceNoch keine Bewertungen
- STD Wizz Lvo Manual I02r00Dokument135 SeitenSTD Wizz Lvo Manual I02r00genakerNoch keine Bewertungen
- Study Guide: Prepared by Captain Jabir Al-HarbiDokument82 SeitenStudy Guide: Prepared by Captain Jabir Al-HarbiKaran Karan100% (5)
- Flight Crew Training Manual (PMDG 737 The Next Generation)Dokument38 SeitenFlight Crew Training Manual (PMDG 737 The Next Generation)Jacob Jack Yosha100% (1)