Das könnte Ihnen auch gefallen
- Flow Chart - Frame AnalysisDokument4 SeitenFlow Chart - Frame Analysisjmcc2Noch keine Bewertungen
- EC3 Steel Design Short CourseDokument3 SeitenEC3 Steel Design Short CoursekiplingkipNoch keine Bewertungen
- Cold Formed Steel DesignDokument2 SeitenCold Formed Steel DesignkiplingkipNoch keine Bewertungen
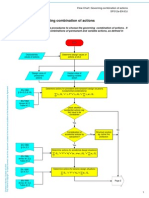
- Flow Chart: Governing Combination of ActionsDokument3 SeitenFlow Chart: Governing Combination of ActionskiplingkipNoch keine Bewertungen
- Comparison of CEM, DEM, XFEM, and Element Erosion MethodDokument19 SeitenComparison of CEM, DEM, XFEM, and Element Erosion MethodkiplingkipNoch keine Bewertungen
- DCP at NUSDokument1 SeiteDCP at NUSkiplingkipNoch keine Bewertungen
- DCP Students in Dialogue With Education MinisterDokument2 SeitenDCP Students in Dialogue With Education MinisterkiplingkipNoch keine Bewertungen
- AQUASTIKDokument3 SeitenAQUASTIKkiplingkipNoch keine Bewertungen
- Catalog of FEMA Earthquake PublicationsDokument28 SeitenCatalog of FEMA Earthquake PublicationskiplingkipNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Module 1 - Les #4 Analysis of TrussDokument9 SeitenModule 1 - Les #4 Analysis of Trusscutie4everrNoch keine Bewertungen
- Finite Element Analysis of Steel CordDokument6 SeitenFinite Element Analysis of Steel CordSanjiv Kumar SinghNoch keine Bewertungen
- Applied Calculus For It - 501031 Essay: 1 IntructionsDokument2 SeitenApplied Calculus For It - 501031 Essay: 1 IntructionsSơn NamNoch keine Bewertungen
- 87716166b1472fd3f7a6a47ea68960afDokument410 Seiten87716166b1472fd3f7a6a47ea68960afPedroNoch keine Bewertungen
- Calculation of Wind Peak Velocity Pressure - Eurocode 1Dokument4 SeitenCalculation of Wind Peak Velocity Pressure - Eurocode 1weipinNoch keine Bewertungen
- Principles of Refrigeration: Standard Template Options and Samples - Mar 2016 - EMR:jmk 1Dokument17 SeitenPrinciples of Refrigeration: Standard Template Options and Samples - Mar 2016 - EMR:jmk 1JhurremNoch keine Bewertungen
- Arta211 MidtermsDokument2 SeitenArta211 MidtermsWallen LagradaNoch keine Bewertungen
- Modeling of Temperature Distributions in Canned Tomato Based Dip During Industrial PasteurizationDokument7 SeitenModeling of Temperature Distributions in Canned Tomato Based Dip During Industrial PasteurizationHugo GermaniNoch keine Bewertungen
- Cuff ManometerDokument1 SeiteCuff ManometerAlejandro Cardona100% (1)
- FST v41 n3P2 Toc PDFDokument11 SeitenFST v41 n3P2 Toc PDFSulabh GuptaNoch keine Bewertungen
- Rotational Dynamics: Physics 101Dokument10 SeitenRotational Dynamics: Physics 101learningboxNoch keine Bewertungen
- Pcs 0626Dokument11 SeitenPcs 0626Diêm Công ViệtNoch keine Bewertungen
- CSTR Excel Model TemplateDokument83 SeitenCSTR Excel Model TemplatefitzggNoch keine Bewertungen
- 1 s2.0 S1359431199000496 Main PDFDokument14 Seiten1 s2.0 S1359431199000496 Main PDFWILLIAMCARABALINoch keine Bewertungen
- Face Detection RecognitionDokument21 SeitenFace Detection RecognitionkamendersinghgangwarNoch keine Bewertungen
- 5.2 Production Facilities PDFDokument110 Seiten5.2 Production Facilities PDFJohn Cooper100% (5)
- Iwnicki 01 06Dokument37 SeitenIwnicki 01 06VICTOR HUGO ORTIZ MOSCOSONoch keine Bewertungen
- Dvp-Es2 Ss2 Sa2 Sx2-Program o en 20110302Dokument14 SeitenDvp-Es2 Ss2 Sa2 Sx2-Program o en 20110302yasinNoch keine Bewertungen
- Sorge 2015Dokument18 SeitenSorge 2015Masih LoghmaniNoch keine Bewertungen
- T316Dokument5 SeitenT316ANKIT SHARMA100% (1)
- Disentangling Classical and Bayesian Approaches To Uncertainty AnalysisDokument19 SeitenDisentangling Classical and Bayesian Approaches To Uncertainty Analysiszilangamba_s4535Noch keine Bewertungen
- Design of Offshore StructuresDokument29 SeitenDesign of Offshore StructuresJOSE PRASOBH..JNoch keine Bewertungen
- Swd-Csa-A23.3-04 (Etabs2013)Dokument81 SeitenSwd-Csa-A23.3-04 (Etabs2013)BJERNoch keine Bewertungen
- Safty Switch 3TK2825Dokument46 SeitenSafty Switch 3TK2825Amir KeikavoosnejadNoch keine Bewertungen
- Design of Stub For Transmission Line TowersDokument26 SeitenDesign of Stub For Transmission Line Towersdebjyoti_das_685% (13)
- Nurture Test Series / Joint Package Course: Distance Learning ProgrammeDokument8 SeitenNurture Test Series / Joint Package Course: Distance Learning ProgrammeRebanta BeraNoch keine Bewertungen
- RT Procedure GeneralDokument18 SeitenRT Procedure GeneralvsnaiduqcNoch keine Bewertungen
- Mechanics of Solids Lab ManualDokument47 SeitenMechanics of Solids Lab Manualravi03319100% (1)
- Ko 2015Dokument22 SeitenKo 2015Mudavath Babu RamNoch keine Bewertungen
- Design of Bolted Beam Splice Connections According To EC3Dokument11 SeitenDesign of Bolted Beam Splice Connections According To EC3Franklyn Genove100% (2)