Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Local Media5941271462837301265Dokument65 SeitenLocal Media5941271462837301265jason mr.perfect11Noch keine Bewertungen
- A New Concept of Power Quality Monitoring: AbstractDokument6 SeitenA New Concept of Power Quality Monitoring: AbstractlokvisNoch keine Bewertungen
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Von EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Noch keine Bewertungen
- Buck Converter Design DemystifiedDokument6 SeitenBuck Converter Design DemystifiedEric MorissetNoch keine Bewertungen
- DC To DC Converters: Version 2 EE IIT, Kharagpur 1Dokument10 SeitenDC To DC Converters: Version 2 EE IIT, Kharagpur 1கிரிதரன் கிரிNoch keine Bewertungen
- DC To DC Converters: Version 2 EE IIT, Kharagpur 1Dokument10 SeitenDC To DC Converters: Version 2 EE IIT, Kharagpur 1Deepak Kumar RajakNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
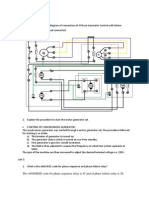
- ALTERNATOR PARTII Edit2023Dokument15 SeitenALTERNATOR PARTII Edit2023Kevin MaramagNoch keine Bewertungen
- Easy(er) Electrical Principles for General Class Ham License (2015-2019)Von EverandEasy(er) Electrical Principles for General Class Ham License (2015-2019)Bewertung: 5 von 5 Sternen5/5 (1)
- Class D Com FonteDokument29 SeitenClass D Com FontenicchioNoch keine Bewertungen
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)Von EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)Noch keine Bewertungen
- Power Supplies Filter CapacitorDokument8 SeitenPower Supplies Filter CapacitorAli KhanNoch keine Bewertungen
- Practical Troubleshooting of Electrical Equipment and Control CircuitsVon EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsBewertung: 4 von 5 Sternen4/5 (5)
- TR Netzfilter-Die Letzte Huerde Im Schaltnetzteil enDokument9 SeitenTR Netzfilter-Die Letzte Huerde Im Schaltnetzteil enDavid Isaias Jaimes ReyesNoch keine Bewertungen
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)Von EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Noch keine Bewertungen
- Switched Mode Power SupplyDokument153 SeitenSwitched Mode Power SupplyIvan222244Noch keine Bewertungen
- 1000w Inverter PURE SINE WAVE Schematic DiagramDokument153 Seiten1000w Inverter PURE SINE WAVE Schematic Diagramjeevapillay100% (4)
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNoch keine Bewertungen
- Capacitance Multiplier Power Supply FilterDokument10 SeitenCapacitance Multiplier Power Supply FilterBiju jpNoch keine Bewertungen
- Case 15Dokument8 SeitenCase 15Alfredo CordovaNoch keine Bewertungen
- EEEN40197 Lecture Notes AJF PDFDokument46 SeitenEEEN40197 Lecture Notes AJF PDFAnonymous gVhwdk9ui9Noch keine Bewertungen
- Theory of Switched Mode Power SupplyDokument21 SeitenTheory of Switched Mode Power Supplyseahate100% (1)
- Error Amplifier Design and ApplicationsDokument6 SeitenError Amplifier Design and ApplicationsGhulam Abbas100% (1)
- Digital Current Limiting Techniques For Switching Power Supplies PDFDokument9 SeitenDigital Current Limiting Techniques For Switching Power Supplies PDFAdolfo A HerreraNoch keine Bewertungen
- Switched Mode Power SupplyDokument10 SeitenSwitched Mode Power SupplySukhminder WaliaNoch keine Bewertungen
- Introduction To Piezoelectric Force SensorsDokument3 SeitenIntroduction To Piezoelectric Force SensorsmiremadmiladNoch keine Bewertungen
- Load Flow Studies On SubstationsDokument40 SeitenLoad Flow Studies On Substationsjilanlucky222100% (1)
- Regulated DC Power Supply Lab AssignmentDokument17 SeitenRegulated DC Power Supply Lab AssignmentSebastien Paul100% (1)
- ENGG 184.12 Lab Activity 4 - Manlapaz & DolalasDokument3 SeitenENGG 184.12 Lab Activity 4 - Manlapaz & DolalasJuan Glicerio C. ManlapazNoch keine Bewertungen
- Power Factor and Input PDFDokument12 SeitenPower Factor and Input PDFBalan PalaniappanNoch keine Bewertungen
- Ac Link Buck Boost ConverterDokument6 SeitenAc Link Buck Boost ConverterrigowNoch keine Bewertungen
- CBCC Amp 2Dokument5 SeitenCBCC Amp 2sru_1990Noch keine Bewertungen
- RPallas Article 2004 2Dokument5 SeitenRPallas Article 2004 2Christopher RoblesNoch keine Bewertungen
- Exercise On Analog Circuits: PHYS 331: Junior Physics Laboratory IDokument6 SeitenExercise On Analog Circuits: PHYS 331: Junior Physics Laboratory Iviso167Noch keine Bewertungen
- 4.ELEC2130 Op-Amp Characteristics - VPDokument10 Seiten4.ELEC2130 Op-Amp Characteristics - VPmahavir prajapatiNoch keine Bewertungen
- Basic Short-Circuit Current CalculationDokument10 SeitenBasic Short-Circuit Current CalculationassaqiNoch keine Bewertungen
- Capacitor Switching Transient: A Review: Amar Jambukar, M. F. A. R. SatarkarDokument8 SeitenCapacitor Switching Transient: A Review: Amar Jambukar, M. F. A. R. SatarkarwasimwalayatNoch keine Bewertungen
- Symmetrical Faults On 3 Phase SystemDokument10 SeitenSymmetrical Faults On 3 Phase Systemprincess doctoleroNoch keine Bewertungen
- VL Sics 040309Dokument10 SeitenVL Sics 040309Anonymous e4UpOQEPNoch keine Bewertungen
- The ANSI/IEEE Code For Phase Sequence Relay Is 47 and of Phase Failure Relay Is 58Dokument9 SeitenThe ANSI/IEEE Code For Phase Sequence Relay Is 47 and of Phase Failure Relay Is 58ax33m144Noch keine Bewertungen
- Experiment 3 Eng NaderDokument7 SeitenExperiment 3 Eng Naderياسر العويطيNoch keine Bewertungen
- Chapter 5 - Power Factor Correction R1Dokument21 SeitenChapter 5 - Power Factor Correction R1Phel FloresNoch keine Bewertungen
- Symmetrical Faults On 3 Phase SystemDokument11 SeitenSymmetrical Faults On 3 Phase SystemChelle Mendoza EslavaNoch keine Bewertungen
- Power Supply Linear RegulatorDokument11 SeitenPower Supply Linear RegulatorSurbhi100% (1)
- An 1162Dokument36 SeitenAn 1162naniknanikNoch keine Bewertungen
- 7 - L-21 (DP) (Pe) ( (Ee) Nptel)Dokument1 Seite7 - L-21 (DP) (Pe) ( (Ee) Nptel)CharkNoch keine Bewertungen
- My Troubleshooting TextbookDokument308 SeitenMy Troubleshooting TextbookHoang DuyNoch keine Bewertungen
- PFC ConverterDokument17 SeitenPFC ConverterSandeep Guha NiyogiNoch keine Bewertungen
- Voltage Sag Compensation Using Dynamic Voltage Restorer: Mayank Paliwal, Rohit Chandra Verma and Shaurya RastogiDokument10 SeitenVoltage Sag Compensation Using Dynamic Voltage Restorer: Mayank Paliwal, Rohit Chandra Verma and Shaurya RastogiKumar RajanNoch keine Bewertungen
- Introduction To Switched-Mode Power Supply (SMPS) CircuitsDokument10 SeitenIntroduction To Switched-Mode Power Supply (SMPS) Circuits9chand3100% (1)
- Harmonicguard™: Harmonic CurrentsDokument5 SeitenHarmonicguard™: Harmonic CurrentsJunior enriquez cabezudoNoch keine Bewertungen
- Class e Resonant InverterDokument6 SeitenClass e Resonant InverterHitesh MehtaNoch keine Bewertungen
- SMPS:-: Switched-Mode Power Supply (Switching-Mode Power Supply, SMPS, or Simplyswitcher) Is An ElectronicDokument4 SeitenSMPS:-: Switched-Mode Power Supply (Switching-Mode Power Supply, SMPS, or Simplyswitcher) Is An ElectronicSumit SrivastavaNoch keine Bewertungen
- PaperID227 SingerDokument6 SeitenPaperID227 Singerrushimunde1212Noch keine Bewertungen
- Tarea ElectronicaDokument23 SeitenTarea ElectronicaSebastian OrdoñezNoch keine Bewertungen
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsVon EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsBewertung: 5 von 5 Sternen5/5 (5)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsVon EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNoch keine Bewertungen
- CISSP All-in-One Exam Guide, Ninth EditionVon EverandCISSP All-in-One Exam Guide, Ninth EditionBewertung: 5 von 5 Sternen5/5 (1)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Von EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Bewertung: 5 von 5 Sternen5/5 (5)
- Digital Transformation: An Executive Guide to Survive and Thrive in the New EconomyVon EverandDigital Transformation: An Executive Guide to Survive and Thrive in the New EconomyBewertung: 5 von 5 Sternen5/5 (1)
- Arduino and Raspberry Pi Sensor Projects for the Evil GeniusVon EverandArduino and Raspberry Pi Sensor Projects for the Evil GeniusNoch keine Bewertungen
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Von EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Bewertung: 5 von 5 Sternen5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyVon EverandChip War: The Fight for the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (230)
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideVon EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideNoch keine Bewertungen
- How To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsVon EverandHow To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsNoch keine Bewertungen
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Von EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Bewertung: 5 von 5 Sternen5/5 (2)
- The comprehensive guide to build Raspberry Pi 5 RoboticsVon EverandThe comprehensive guide to build Raspberry Pi 5 RoboticsNoch keine Bewertungen
- Computer Science: A Concise IntroductionVon EverandComputer Science: A Concise IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (14)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsVon EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsNoch keine Bewertungen
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Von EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Bewertung: 5 von 5 Sternen5/5 (1)