Das könnte Ihnen auch gefallen
- Inyectores Vortec: análisis y mantenimientoDokument11 SeitenInyectores Vortec: análisis y mantenimientoMarcos Bele100% (2)
- Manual de Inspección de Soldadura OSA (Parte 1)Dokument40 SeitenManual de Inspección de Soldadura OSA (Parte 1)alfredo dominguez dominguez100% (1)
- Protocolo de Partidas EjecutadasDokument17 SeitenProtocolo de Partidas EjecutadasAlberto Cruz RomeroNoch keine Bewertungen
- Ensayo 3 Control y Regulacion de InyectoresDokument10 SeitenEnsayo 3 Control y Regulacion de InyectoresRaul PerezNoch keine Bewertungen
- Elementos Primarios de La FormaDokument10 SeitenElementos Primarios de La FormaNery Estuardo JucubNoch keine Bewertungen
- Ecuaciones de Diseño para Evaporadores de Simple EfectoDokument5 SeitenEcuaciones de Diseño para Evaporadores de Simple EfectoRichard Icaro Esparza100% (2)
- Pregunta de Ewxamen de Licencia de Conducir Nro 11Dokument12 SeitenPregunta de Ewxamen de Licencia de Conducir Nro 11Melvin Molina100% (1)
- Gl-I-02 Instructivo Lavado de MaterialDokument3 SeitenGl-I-02 Instructivo Lavado de MaterialMichael Huisa Taipe100% (1)
- Cuestionario Sobre TuberiasDokument14 SeitenCuestionario Sobre Tuberiasjhony1523100% (1)
- Tarea 13 OkokDokument4 SeitenTarea 13 OkokAdrian LovonNoch keine Bewertungen
- PC2 - Diseño y Analisis EstructuralDokument80 SeitenPC2 - Diseño y Analisis EstructuralCesar Eduardo Cisneros LozaNoch keine Bewertungen
- Esquema MonoproticoDokument128 SeitenEsquema MonoproticoJonathan VillafañeNoch keine Bewertungen
- Antena IsotronDokument3 SeitenAntena IsotronFelipe Valencia100% (1)
- Cuadro Prueba TedidoDokument35 SeitenCuadro Prueba Tedidojesus navaNoch keine Bewertungen
- Tabla de Disolvente PVC PetDokument4 SeitenTabla de Disolvente PVC PetOscar Gerardo Bautista80% (5)
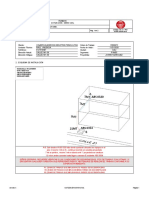
- 01 Curvado 60x40Dokument1 Seite01 Curvado 60x40Alfonsina ReyesNoch keine Bewertungen
- Manual de Operación de PozosDokument52 SeitenManual de Operación de PozosHECTOR CARLIN100% (2)
- Osmosis InversaDokument5 SeitenOsmosis InversaCecilia Melgarejo HuamanNoch keine Bewertungen
- Smith HouseDokument8 SeitenSmith HouseRafael GutiérrezNoch keine Bewertungen
- Espacios Confinados Modulo IIDokument23 SeitenEspacios Confinados Modulo IICHRISTOPHER ALMONTE ALVARADO100% (1)
- Ok Fundicion y Colada 2014Dokument43 SeitenOk Fundicion y Colada 2014juancarlosjuaquinNoch keine Bewertungen
- Mundo Minero Octubre 2015Dokument76 SeitenMundo Minero Octubre 2015Mundo Minero100% (1)
- Instalación de radiador modelo Europa C-Xian N en vivienda de C/CanariasDokument2 SeitenInstalación de radiador modelo Europa C-Xian N en vivienda de C/Canariasjosele123Noch keine Bewertungen
- P993 - Planeamiento de Giro Gateo Lanzamiento y Descenso - Rev.2Dokument119 SeitenP993 - Planeamiento de Giro Gateo Lanzamiento y Descenso - Rev.2Mai RomeroNoch keine Bewertungen
- Todas Las Herramientas para Celulares - VYGIS TOOL BOXDokument2 SeitenTodas Las Herramientas para Celulares - VYGIS TOOL BOXinkabebeNoch keine Bewertungen
- Diodo ZenerDokument3 SeitenDiodo Zenerangela patricia paez portilloNoch keine Bewertungen
- Especificaciones Del Nokia 7230Dokument9 SeitenEspecificaciones Del Nokia 7230urioleteNoch keine Bewertungen
- Suelo ChacarillaDokument18 SeitenSuelo ChacarillaLigia HinojosaNoch keine Bewertungen
- 7MWTW7300EW Manual de Uso y Cuidado PDFDokument23 Seiten7MWTW7300EW Manual de Uso y Cuidado PDFjuan marquezNoch keine Bewertungen