Das könnte Ihnen auch gefallen
- MATH 223 Advanced Engineering Mathematics W9 To W13 PDFDokument54 SeitenMATH 223 Advanced Engineering Mathematics W9 To W13 PDFGreen zolarNoch keine Bewertungen
- Miniarelli Am6 Repair Manual English TZR Aprillia RsDokument40 SeitenMiniarelli Am6 Repair Manual English TZR Aprillia Rsmotor_xtream100% (5)
- Salesforce Forcecom WorkbookDokument116 SeitenSalesforce Forcecom WorkbookMartin CialdellaNoch keine Bewertungen
- Honeywell Group IT PolicyDokument73 SeitenHoneywell Group IT PolicyLyn Serwaah Gorni100% (1)
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Dokument5 SeitenWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiNoch keine Bewertungen
- Lab Manual - EEE 402 - Exp01 July2014Dokument7 SeitenLab Manual - EEE 402 - Exp01 July2014AhammadSifatNoch keine Bewertungen
- Active Ethernet Micro Controller Users Manual v1Dokument220 SeitenActive Ethernet Micro Controller Users Manual v1valuetechNoch keine Bewertungen
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotDokument8 SeitenDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarNoch keine Bewertungen
- Design ControllerDokument34 SeitenDesign ControllerMaezinha_MarinelaNoch keine Bewertungen
- Temperature Control Using LabviewDokument5 SeitenTemperature Control Using LabviewReyyan KhalidNoch keine Bewertungen
- EE2401 - Power System Operation and Control Unit II Real Power-Frequency ControlDokument27 SeitenEE2401 - Power System Operation and Control Unit II Real Power-Frequency ControlSilas Stephen100% (1)
- Tutorial On ScilabDokument82 SeitenTutorial On ScilabAbril de VeraNoch keine Bewertungen
- Tarea 5-Ecuaciones DiferencialesDokument8 SeitenTarea 5-Ecuaciones DiferencialesReal NofakeNoch keine Bewertungen
- Managing The Full API Lifecycle Ebook - 0 PDFDokument22 SeitenManaging The Full API Lifecycle Ebook - 0 PDFatifhassansiddiquiNoch keine Bewertungen
- Controlling Software Maintenance Expectations with Service Level AgreementsDokument9 SeitenControlling Software Maintenance Expectations with Service Level AgreementsBel AmiNoch keine Bewertungen
- Ee5101 Ca1 PDFDokument24 SeitenEe5101 Ca1 PDFHamid FarhanNoch keine Bewertungen
- Linear Systems Project Report Analysis and Control DesignDokument22 SeitenLinear Systems Project Report Analysis and Control DesignJie RongNoch keine Bewertungen
- Mechanism Final ProjectDokument14 SeitenMechanism Final Projectsundari_murali100% (2)
- Control a stationary self-balancing two-wheeled vehicleDokument7 SeitenControl a stationary self-balancing two-wheeled vehiclekhooteckkienNoch keine Bewertungen
- Sheet 4Dokument6 SeitenSheet 4geniust0% (1)
- Generator swing equation block diagram analysisDokument5 SeitenGenerator swing equation block diagram analysisRojan Bhattarai100% (1)
- Lab 5 ControlDokument6 SeitenLab 5 ControlAyaz AhmadNoch keine Bewertungen
- Wheeled Inverted Pendulum EquationsDokument10 SeitenWheeled Inverted Pendulum EquationsMunzir ZafarNoch keine Bewertungen
- Design ProjectDokument22 SeitenDesign ProjectRobert T KasumiNoch keine Bewertungen
- Introduction to control systems in 40 charactersDokument7 SeitenIntroduction to control systems in 40 charactersLaily EdarisNoch keine Bewertungen
- Solve Ex 2.0Dokument6 SeitenSolve Ex 2.0Omar Abd El-RaoufNoch keine Bewertungen
- MECH 371 Lab 1Dokument9 SeitenMECH 371 Lab 1Eugene ToNoch keine Bewertungen
- Dynamic ErrorDokument7 SeitenDynamic ErrorSuvra PattanayakNoch keine Bewertungen
- Routh Criterion - Tutorial 7 - Co - 12Dokument3 SeitenRouth Criterion - Tutorial 7 - Co - 12Haelu KuNoch keine Bewertungen
- RLL Design for Sequencing SystemsDokument20 SeitenRLL Design for Sequencing SystemsDivya AhujaNoch keine Bewertungen
- Unit-III-State Space Analysis in Discrete Time Control SystemDokument49 SeitenUnit-III-State Space Analysis in Discrete Time Control Systemkrushnasamy subramaniyan100% (2)
- Double Inverted Pendulum On A Cart-R07Dokument25 SeitenDouble Inverted Pendulum On A Cart-R07Dragan ErcegNoch keine Bewertungen
- PDFDokument24 SeitenPDFOlga Joy Labajo GerastaNoch keine Bewertungen
- 4613 ReportDokument35 Seiten4613 ReportRUNLIN MA100% (1)
- Module 5 - Madgwick FilterDokument46 SeitenModule 5 - Madgwick FilterYonas Ghiwot100% (1)
- Mechanical Vibrations (ME 65) Chapter-8 Multi Degree of Freedom SystemsDokument36 SeitenMechanical Vibrations (ME 65) Chapter-8 Multi Degree of Freedom SystemsGURUPRASAD KADAGADNoch keine Bewertungen
- Understanding Exergy and its ApplicationsDokument30 SeitenUnderstanding Exergy and its ApplicationsRooth Adajet100% (1)
- State Errors - Steady: Eman Ahmad KhalafDokument28 SeitenState Errors - Steady: Eman Ahmad KhalafAhmed Mohammed khalfNoch keine Bewertungen
- 2003 - Discretization Method DC MotorDokument4 Seiten2003 - Discretization Method DC MotorTheodoroFirmoNoch keine Bewertungen
- MCT Question BankDokument5 SeitenMCT Question BankKalamchety Ravikumar SrinivasaNoch keine Bewertungen
- Lecture-3 Modeling in Time DomainDokument24 SeitenLecture-3 Modeling in Time DomainRayana ray0% (1)
- UAH - Fall 2014 - ISE 690 - Helvaci - Final Exam Formula SheetDokument2 SeitenUAH - Fall 2014 - ISE 690 - Helvaci - Final Exam Formula SheetAnaan EemusNoch keine Bewertungen
- Vidyarthiplus System Theory Question BankDokument11 SeitenVidyarthiplus System Theory Question Banksyed1188100% (1)
- Frequency Response PlotsDokument8 SeitenFrequency Response PlotsMOHAMED IBRAHIM0% (1)
- Mid SolutionDokument7 SeitenMid SolutionsibieNoch keine Bewertungen
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDokument5 SeitenExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathNoch keine Bewertungen
- Inverted PendulumDokument4 SeitenInverted PendulumFerbNoch keine Bewertungen
- Theory: Forced Vibration of Two Degrees of Freedom SystemDokument4 SeitenTheory: Forced Vibration of Two Degrees of Freedom SystemettypasewangNoch keine Bewertungen
- CPM2 PLC Control of Manipulator MotionDokument5 SeitenCPM2 PLC Control of Manipulator MotionIlija Petkovic0% (1)
- CNC Report Bhel Haridwar Summer Training Report Electronic & CommunicationDokument29 SeitenCNC Report Bhel Haridwar Summer Training Report Electronic & Communicationritika_arora19067% (3)
- A Tutorial On Optimal Control Theory: Suresh P. SethiDokument14 SeitenA Tutorial On Optimal Control Theory: Suresh P. Sethiعبدالرحمن الزهرانيNoch keine Bewertungen
- EigenvaluesDokument29 SeitenEigenvaluesarmjafariNoch keine Bewertungen
- Question Bank Unit IIDokument10 SeitenQuestion Bank Unit IISachin BharadwajNoch keine Bewertungen
- Experiment No.1 - Introduction To MATLAB and Simulink Software ToolsDokument2 SeitenExperiment No.1 - Introduction To MATLAB and Simulink Software ToolsKalin GordanovichNoch keine Bewertungen
- Control System NOTESDokument9 SeitenControl System NOTESSTUDENTS OF DOE CUSATNoch keine Bewertungen
- Electrical Machines 4 Lab 1 Results Sheet Ver 2Dokument2 SeitenElectrical Machines 4 Lab 1 Results Sheet Ver 2asipheNoch keine Bewertungen
- Practica Acustica ESIME CulhuacanDokument8 SeitenPractica Acustica ESIME CulhuacanJalil RamirezNoch keine Bewertungen
- Project Report Control (DC Motor Module DCM150f) KP KDDokument5 SeitenProject Report Control (DC Motor Module DCM150f) KP KD黒い からすNoch keine Bewertungen
- 3.the Methods and Tools Used To Measure The Dynamic ForcesDokument3 Seiten3.the Methods and Tools Used To Measure The Dynamic ForcesМурад ГусейнзадеNoch keine Bewertungen
- ECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. JacksonDokument4 SeitenECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. Jacksonnida haqNoch keine Bewertungen
- Thermodynamic System Properties and Gas Laws TutorialDokument6 SeitenThermodynamic System Properties and Gas Laws TutorialDivij SoodNoch keine Bewertungen
- Lecture 9 (33-38)Dokument6 SeitenLecture 9 (33-38)Saif AlabdullahNoch keine Bewertungen
- Lab 6Dokument3 SeitenLab 6Vu LeNoch keine Bewertungen
- Nonlinear Control Feedback Linearization Sliding Mode ControlVon EverandNonlinear Control Feedback Linearization Sliding Mode ControlNoch keine Bewertungen
- RP Journal 1904-4720 511 QuadcopterDokument22 SeitenRP Journal 1904-4720 511 QuadcopterasbbabaNoch keine Bewertungen
- EEL 6227 Homework #2 Assignment: - Problems (Due Date Sept-23-2014)Dokument3 SeitenEEL 6227 Homework #2 Assignment: - Problems (Due Date Sept-23-2014)asbbabaNoch keine Bewertungen
- ObjectiveDokument1 SeiteObjectiveasbbabaNoch keine Bewertungen
- 4-1 SyllabusDokument10 Seiten4-1 SyllabusasbbabaNoch keine Bewertungen
- Electronics Engineer Resume SummaryDokument2 SeitenElectronics Engineer Resume SummaryasbbabaNoch keine Bewertungen
- Build Long-Range FM Transmitter Up To 2kmDokument1 SeiteBuild Long-Range FM Transmitter Up To 2kmMallieswaran SubbaiyanNoch keine Bewertungen
- Op-amp triangular wave generator circuit explainedDokument1 SeiteOp-amp triangular wave generator circuit explainedasbbabaNoch keine Bewertungen
- EIEDokument100 SeitenEIESyed AshmadNoch keine Bewertungen
- An Overview On How To Develop A Low-Code Application Using OutsystemsDokument7 SeitenAn Overview On How To Develop A Low-Code Application Using OutsystemsTapiwa JemwaNoch keine Bewertungen
- Jason Drohn ResumeDokument3 SeitenJason Drohn ResumebwsubbuNoch keine Bewertungen
- Basic Computer Literacy Test Questions and Answers PDF - Online Study TestDokument35 SeitenBasic Computer Literacy Test Questions and Answers PDF - Online Study TestJaico DictaanNoch keine Bewertungen
- Installation - Documentation - AkauntingDokument1 SeiteInstallation - Documentation - AkauntingwaerrrNoch keine Bewertungen
- Cs 502 Database Management Systems Jun 2020Dokument3 SeitenCs 502 Database Management Systems Jun 2020signup onsitesNoch keine Bewertungen
- Cognos TM1 9.5.1 Software EnvironmentsDokument4 SeitenCognos TM1 9.5.1 Software EnvironmentsGaurav JainNoch keine Bewertungen
- Bank Data Sync SystemDokument4 SeitenBank Data Sync SystemCOMACO DATANoch keine Bewertungen
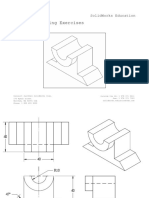
- Detailed Drawing Exercises: Solidworks EducationDokument51 SeitenDetailed Drawing Exercises: Solidworks EducationRaja PandiNoch keine Bewertungen
- PrE4 Module 1Dokument8 SeitenPrE4 Module 1Galang, Princess T.Noch keine Bewertungen
- FINALS - Technology Integration Planning 2023Dokument3 SeitenFINALS - Technology Integration Planning 2023Keziah O. BarrientosNoch keine Bewertungen
- Sureshkumarmoharana (1 6)Dokument3 SeitenSureshkumarmoharana (1 6)Vipin HandigundNoch keine Bewertungen
- Evermotion 58 PDFDokument2 SeitenEvermotion 58 PDFCassandraNoch keine Bewertungen
- SPP2021 05 0ContentsReportDokument217 SeitenSPP2021 05 0ContentsReportAnton KobrinskyNoch keine Bewertungen
- EhjsgswgfaweawtgDokument336 SeitenEhjsgswgfaweawtgSATISH WORDBOXNoch keine Bewertungen
- EmpoTech Module 1Dokument40 SeitenEmpoTech Module 1trixie eustaquioNoch keine Bewertungen
- Aryldo Russo - Safety Certification Considering Processes Around The World1Dokument29 SeitenAryldo Russo - Safety Certification Considering Processes Around The World1Ron HemNoch keine Bewertungen
- Gin9505234j7 Cfdfoliomatpco22285 1 PDFDokument9 SeitenGin9505234j7 Cfdfoliomatpco22285 1 PDFFernanda VázquezNoch keine Bewertungen
- Essential Introduction To ComputersDokument7 SeitenEssential Introduction To ComputersAminiasi SalatovouNoch keine Bewertungen
- SQL For Interviews?Dokument9 SeitenSQL For Interviews?Tchalla ZulluNoch keine Bewertungen
- Informix Webcast Upgrading To Informix14-LesterKnutsenDokument46 SeitenInformix Webcast Upgrading To Informix14-LesterKnutsengenNoch keine Bewertungen
- Perancangan Animasi 3D "Cuma Mimpi" Menggunakan Pemodelan High Poly Pada Zbrush 3.5R3 Dan 3Ds Max 2009Dokument9 SeitenPerancangan Animasi 3D "Cuma Mimpi" Menggunakan Pemodelan High Poly Pada Zbrush 3.5R3 Dan 3Ds Max 2009Yola ZaharaNoch keine Bewertungen
- Sap IntroductionDokument21 SeitenSap IntroductionRahulNoch keine Bewertungen
- Create An Application Pool (IIS 7)Dokument3 SeitenCreate An Application Pool (IIS 7)Karan MishraNoch keine Bewertungen
- Advantage Licensing Faqs PDFDokument7 SeitenAdvantage Licensing Faqs PDFSunil KoricherlaNoch keine Bewertungen
- Lexmark Address Book Administrator's GuideDokument10 SeitenLexmark Address Book Administrator's Guidegeko1Noch keine Bewertungen