Das könnte Ihnen auch gefallen
- 105a8e2c 12aa 4fDokument6 Seiten105a8e2c 12aa 4fAnonymous bgvS9DNoch keine Bewertungen
- Application of Space Vector Modulation in Direct Torque Control of PMSMDokument4 SeitenApplication of Space Vector Modulation in Direct Torque Control of PMSMenmnabilNoch keine Bewertungen
- Comparative Study of Sensorless Control Methods of PMSM DrivesDokument23 SeitenComparative Study of Sensorless Control Methods of PMSM DrivesVinh LeNoch keine Bewertungen
- Simulation and Analysis of Modified DTC of PMSMDokument10 SeitenSimulation and Analysis of Modified DTC of PMSMpreetivermaeeeNoch keine Bewertungen
- Adaptive Bandwidth Approach ON DTC Controlled Induction MotorDokument9 SeitenAdaptive Bandwidth Approach ON DTC Controlled Induction MotorijicsjournalNoch keine Bewertungen
- Sliding ModeDokument13 SeitenSliding ModeSiva Ganesh MallaNoch keine Bewertungen
- Fuzzy Logic Based Direct Power Control of Induction Motor DriveDokument11 SeitenFuzzy Logic Based Direct Power Control of Induction Motor DriveNagulapati KiranNoch keine Bewertungen
- Sliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouiDokument15 SeitenSliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouihasanmasoudiNoch keine Bewertungen
- Dan SunDokument6 SeitenDan Sunjagarov4954Noch keine Bewertungen
- An Experimental Assessment of Direct Torque Control and Model Predictive Control Methods For Induction Machine DriveDokument6 SeitenAn Experimental Assessment of Direct Torque Control and Model Predictive Control Methods For Induction Machine DriveAbo KikiNoch keine Bewertungen
- DSP Control of Stepper MotorDokument5 SeitenDSP Control of Stepper MotorAhmedHyderMohdNoch keine Bewertungen
- Speed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerDokument6 SeitenSpeed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerVijay KumarNoch keine Bewertungen
- Comparison of FOC and DTCDokument6 SeitenComparison of FOC and DTCchienbkaNoch keine Bewertungen
- Jeas 0408 94Dokument7 SeitenJeas 0408 94Jun Chee LimNoch keine Bewertungen
- High Performance Direct Torque Control of Induction Motor Drives Using Space Vector ModulationDokument9 SeitenHigh Performance Direct Torque Control of Induction Motor Drives Using Space Vector ModulationMefisto ElNoch keine Bewertungen
- Dynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesDokument5 SeitenDynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesRaspy ReddyNoch keine Bewertungen
- Finalpaper 135Dokument6 SeitenFinalpaper 135vinaynitw257Noch keine Bewertungen
- Direct Torque Control of Inverter Fed PMSM Drive Using SVMDokument7 SeitenDirect Torque Control of Inverter Fed PMSM Drive Using SVMInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Speed Control of PMSM by Using DSVM - DTC TechniqueDokument5 SeitenSpeed Control of PMSM by Using DSVM - DTC TechniqueKushagra KhamesraNoch keine Bewertungen
- Sliding Mode Control of Induction Motor ThesisDokument6 SeitenSliding Mode Control of Induction Motor Thesiss0kuzej0byn2100% (2)
- Robust DTC Control of Doubly-Fed Induction Machines Based On Input-Output Feedback Linearization Using Recurrent Neural NetworksDokument7 SeitenRobust DTC Control of Doubly-Fed Induction Machines Based On Input-Output Feedback Linearization Using Recurrent Neural NetworksnaserhashemniaNoch keine Bewertungen
- 08598921外文1Dokument11 Seiten08598921外文11392297140sNoch keine Bewertungen
- New Sensor LessDokument10 SeitenNew Sensor LessAbhishek AgarwalNoch keine Bewertungen
- Three-Phase Induction Motor DTC-SVM Scheme With Self-Tuning PI-Type Fuzzy ControllerDokument6 SeitenThree-Phase Induction Motor DTC-SVM Scheme With Self-Tuning PI-Type Fuzzy Controllerjorgeluis.unknownman667Noch keine Bewertungen
- A54 2 Korzeniewski Improved Algorithms of Direct Torque Control MethodDokument11 SeitenA54 2 Korzeniewski Improved Algorithms of Direct Torque Control MethodMohamed Elsaid El ShallNoch keine Bewertungen
- A Direct Torque Controlled Induction Motor With Variable Hysteresis BandDokument6 SeitenA Direct Torque Controlled Induction Motor With Variable Hysteresis BandMuhammad SaadNoch keine Bewertungen
- Model Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveDokument9 SeitenModel Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Thesis On Direct Torque ControlDokument6 SeitenThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- CMP0193 SynopsisDokument6 SeitenCMP0193 Synopsissumiths32Noch keine Bewertungen
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDokument6 SeitenComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20Noch keine Bewertungen
- Paper 78Dokument8 SeitenPaper 78Sanker VikramNoch keine Bewertungen
- A Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor DriveDokument6 SeitenA Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor Driveshoebhussain01Noch keine Bewertungen
- A Modified Sensorless Control of Induction Motor Based On Reactive PowerDokument4 SeitenA Modified Sensorless Control of Induction Motor Based On Reactive PowerSherif M. DabourNoch keine Bewertungen
- Direct Torque ControlDokument5 SeitenDirect Torque Controlvineeth kumarNoch keine Bewertungen
- Model-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsDokument11 SeitenModel-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsMaroju Santosh KiranNoch keine Bewertungen
- Space Vector Flux Weakening Control of PMSM DriverDokument8 SeitenSpace Vector Flux Weakening Control of PMSM DriverOsama AttookNoch keine Bewertungen
- Comparison of DTC and FOCDokument5 SeitenComparison of DTC and FOCJuseverck JuniorNoch keine Bewertungen
- Combining The Principles of Variable Structure, Direct Torque Control, and Space Vector Modulation For Induction Motor Fed by Matrix ConverterDokument7 SeitenCombining The Principles of Variable Structure, Direct Torque Control, and Space Vector Modulation For Induction Motor Fed by Matrix ConverterGacem AminaNoch keine Bewertungen
- Optimal Torque Control of The Externally Excited Synchronous MachineDokument10 SeitenOptimal Torque Control of The Externally Excited Synchronous MachinescrandNoch keine Bewertungen
- Ga Speed and DQ Currnets Control of PMSM WithDokument9 SeitenGa Speed and DQ Currnets Control of PMSM Withhieuhuech1Noch keine Bewertungen
- A Direct Torque Control Method For CSC Based PMSG Wind Energy Conversion SystemsDokument7 SeitenA Direct Torque Control Method For CSC Based PMSG Wind Energy Conversion SystemsLê Xuân ThăngNoch keine Bewertungen
- ++field Weakening Operation With Maximum TorqueDokument7 Seiten++field Weakening Operation With Maximum TorqueGaspar RodriguezNoch keine Bewertungen
- Direct Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachDokument4 SeitenDirect Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachKushagra KhamesraNoch keine Bewertungen
- Robust Self-Tuning MTPA Algorithm For IPMSM Drives 2008Dokument6 SeitenRobust Self-Tuning MTPA Algorithm For IPMSM Drives 2008Giang LamNoch keine Bewertungen
- Mras CurrentsDokument7 SeitenMras CurrentsAymen OmariNoch keine Bewertungen
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDokument8 SeitenComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulNoch keine Bewertungen
- Sensorless Three-Phase Induction Motor Direct TorqDokument7 SeitenSensorless Three-Phase Induction Motor Direct TorqSakthivelNoch keine Bewertungen
- Direct Torque Control of Induction Motor Using Artificial Neural NetworkDokument7 SeitenDirect Torque Control of Induction Motor Using Artificial Neural NetworkMohamed SomaiNoch keine Bewertungen
- Simulation Study of Conventional Control Versus MTPA-Based For PMSM ControlDokument4 SeitenSimulation Study of Conventional Control Versus MTPA-Based For PMSM Controlpersian67Noch keine Bewertungen
- Sensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.irDokument8 SeitenSensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.ira1690074Noch keine Bewertungen
- Speed Control of DC Motor Using Sliding Mode Control ApproachDokument5 SeitenSpeed Control of DC Motor Using Sliding Mode Control ApproachIOSRjournalNoch keine Bewertungen
- Direct Torque Control of Induction MotorsDokument6 SeitenDirect Torque Control of Induction MotorsInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Extended Kalman Filter Based Speed Sensor Less PMSM Control With Load ReconstructionDokument16 SeitenExtended Kalman Filter Based Speed Sensor Less PMSM Control With Load ReconstructionSohibul HajahNoch keine Bewertungen
- Review of Sliding Mode Observers For Sensorless Co PDFDokument9 SeitenReview of Sliding Mode Observers For Sensorless Co PDFbobjiNoch keine Bewertungen
- Power System Stabilizer Placement and TuningDokument6 SeitenPower System Stabilizer Placement and TuningrnmukerjeeNoch keine Bewertungen
- Full Text 302010Dokument8 SeitenFull Text 302010belsebtiNoch keine Bewertungen
- Position Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionDokument14 SeitenPosition Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionأسامةبوعزيزNoch keine Bewertungen
- Exploring The Problems and Remedies: Lech M. Grzesiak and Marian P. KazmierkowskiDokument12 SeitenExploring The Problems and Remedies: Lech M. Grzesiak and Marian P. KazmierkowskiSathishraj SaraajNoch keine Bewertungen
- Simplified Sensorless Control For BLDC MDokument12 SeitenSimplified Sensorless Control For BLDC MAlg DimasNoch keine Bewertungen
- Your CB Success Depends On The NICHE You ChooseDokument7 SeitenYour CB Success Depends On The NICHE You ChooseFrancisco Liszt Nunes JuniorNoch keine Bewertungen
- Click Here To Access The "Clickbank Marketing Secrets" Video Course!Dokument8 SeitenClick Here To Access The "Clickbank Marketing Secrets" Video Course!Francisco Liszt Nunes JuniorNoch keine Bewertungen
- Rovelli - Quantum GravityDokument347 SeitenRovelli - Quantum Gravityapi-3835172Noch keine Bewertungen
- Octavefemm PDFDokument63 SeitenOctavefemm PDFFrancisco Liszt Nunes JuniorNoch keine Bewertungen
- Xxperiment 1 Intxoduxtion To The Oscilloscope, The Sixnal Gxnerator Xixital Muxtimetxr and The Laboratorx Personal CoxpuxerDokument1 SeiteXxperiment 1 Intxoduxtion To The Oscilloscope, The Sixnal Gxnerator Xixital Muxtimetxr and The Laboratorx Personal CoxpuxerFrancisco Liszt Nunes JuniorNoch keine Bewertungen
- Hauser Vs To L Aircraft 1992Dokument15 SeitenHauser Vs To L Aircraft 1992Francisco Liszt Nunes JuniorNoch keine Bewertungen
- Genetic Algorithm Optimized PI and Fuzzy Sliding Mode Speed Control For DTC DrivesDokument6 SeitenGenetic Algorithm Optimized PI and Fuzzy Sliding Mode Speed Control For DTC DrivesFrancisco Liszt Nunes JuniorNoch keine Bewertungen
- Harpa Crista 577 em Fervente OracaoDokument1 SeiteHarpa Crista 577 em Fervente OracaoFrancisco Liszt Nunes JuniorNoch keine Bewertungen
- Customer DemandDokument42 SeitenCustomer Demandtulika_ajwaniNoch keine Bewertungen
- Final ProjectDokument4 SeitenFinal ProjectChacho BacoaNoch keine Bewertungen
- Astm - D573.25993Dokument6 SeitenAstm - D573.25993Bryan de BarrosNoch keine Bewertungen
- Ims PrecalDokument10 SeitenIms PrecalRhea GlipoNoch keine Bewertungen
- Epson L6170 Wi-Fi Duplex All-in-One Ink Tank Printer With ADFDokument3 SeitenEpson L6170 Wi-Fi Duplex All-in-One Ink Tank Printer With ADFCarl DonaireNoch keine Bewertungen
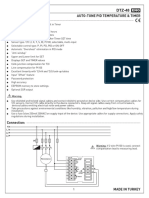
- Auto-Tune Pid Temperature & Timer General Specifications: N L1 L2 L3Dokument4 SeitenAuto-Tune Pid Temperature & Timer General Specifications: N L1 L2 L3sharawany 20Noch keine Bewertungen
- Assignment 1Dokument3 SeitenAssignment 1Carolyn WangNoch keine Bewertungen
- TR 94 13Dokument25 SeitenTR 94 13Christian Norambuena VallejosNoch keine Bewertungen
- Soiling Rates of PV Modules vs. Thermopile PyranometersDokument3 SeitenSoiling Rates of PV Modules vs. Thermopile PyranometersAbdul Mohid SheikhNoch keine Bewertungen
- EC SyllDokument4 SeitenEC SyllDDIYNoch keine Bewertungen
- Python Unit 1Dokument18 SeitenPython Unit 1Rtr. Venkata chetan Joint secretaryNoch keine Bewertungen
- Measures of Central Tendency: Mean Median ModeDokument20 SeitenMeasures of Central Tendency: Mean Median ModeRia BarisoNoch keine Bewertungen
- JSF + JPA + JasperReports (Ireport) Part 2 - Ramki Java BlogDokument7 SeitenJSF + JPA + JasperReports (Ireport) Part 2 - Ramki Java BlogMartin MurciegoNoch keine Bewertungen
- Put Call ParityDokument37 SeitenPut Call ParityVaidyanathan Ravichandran100% (1)
- Acceleration InquiryDokument4 SeitenAcceleration Inquiryapi-240343522Noch keine Bewertungen
- Frequency AdverbsDokument4 SeitenFrequency AdverbsAlexander ScrNoch keine Bewertungen
- EXCEL - How To Write Perfect VLOOKUP and INDEX and MATCH FormulasDokument29 SeitenEXCEL - How To Write Perfect VLOOKUP and INDEX and MATCH Formulasgerrydimayuga100% (1)
- Ruby On Rails 3 Cheat SheetDokument7 SeitenRuby On Rails 3 Cheat SheetJarosław MedwidNoch keine Bewertungen
- CATIA COMPOSER SYNC2 FLYER 2014 Draft2Dokument2 SeitenCATIA COMPOSER SYNC2 FLYER 2014 Draft2타키비Noch keine Bewertungen
- Multiple Choice Questions (The Answers Are Provided After The Last Question.)Dokument6 SeitenMultiple Choice Questions (The Answers Are Provided After The Last Question.)VijendraNoch keine Bewertungen
- High Pressure Jet Grouting in TunnelsDokument8 SeitenHigh Pressure Jet Grouting in TunnelsSandeep AggarwalNoch keine Bewertungen
- CISCO Router Software - Configuration PDFDokument408 SeitenCISCO Router Software - Configuration PDFasalihovicNoch keine Bewertungen
- SAT Practice Book 2009 2010Dokument204 SeitenSAT Practice Book 2009 2010Fedrick Tharun T100% (1)
- Dawn C. Meredith, Meaning MakingDokument2 SeitenDawn C. Meredith, Meaning MakingMrsriyansyahNoch keine Bewertungen
- Estimating QuotientsDokument7 SeitenEstimating Quotientssheila mae neri100% (1)
- NumaticsFRLFlexiblokR072010 EsDokument40 SeitenNumaticsFRLFlexiblokR072010 EsGabriel San Martin RifoNoch keine Bewertungen
- Instructor Guide For IntroductionDokument174 SeitenInstructor Guide For IntroductionNIRANJANNoch keine Bewertungen
- Origin and Structure of The EarthDokument8 SeitenOrigin and Structure of The EarthRobin Suarez ViladoNoch keine Bewertungen
- Javascript Html5 CanavasDokument13 SeitenJavascript Html5 CanavasmihailuNoch keine Bewertungen