Das könnte Ihnen auch gefallen
- Apendice FDokument2 SeitenApendice FJoel Leandro Ibarra CoriaNoch keine Bewertungen
- Manual PMDokument122 SeitenManual PMEdilson Andres GonzalezNoch keine Bewertungen
- Formato Checklist Tractor PDFDokument1 SeiteFormato Checklist Tractor PDFIgnacia Pino RiveraNoch keine Bewertungen
- Control de Combustible y Flota - DeMODokument3.588 SeitenControl de Combustible y Flota - DeMOmarcelo_ortNoch keine Bewertungen
- Limpieza y Sanitizacion AreaDokument24 SeitenLimpieza y Sanitizacion Areamarcelo_ortNoch keine Bewertungen
- Llenado de BandejaDokument1 SeiteLlenado de Bandejamarcelo_ortNoch keine Bewertungen
- 11 Normas Haccp PDFDokument16 Seiten11 Normas Haccp PDFChristopper MoralesNoch keine Bewertungen
- Ca PG 030 03Dokument33 SeitenCa PG 030 03marcelo_ortNoch keine Bewertungen
- Modulo 1Dokument31 SeitenModulo 1marcelo_ortNoch keine Bewertungen
- 038 Procedimiento Mantenimiento Equipos MaquinasDokument12 Seiten038 Procedimiento Mantenimiento Equipos MaquinasFelipe MoraNoch keine Bewertungen
- D AA 10 Manual Mantenimiento Preventivo Equipos Laboratorio IndustrialDokument13 SeitenD AA 10 Manual Mantenimiento Preventivo Equipos Laboratorio IndustrialJovanny Marquez100% (1)
- Capacitación RCA RADokument8 SeitenCapacitación RCA RAmarcelo_ortNoch keine Bewertungen
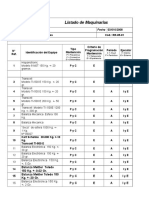
- Listado de Maquinarias BalanzasDokument2 SeitenListado de Maquinarias Balanzasmarcelo_ortNoch keine Bewertungen
- Listado de Maquinarias BalanzasDokument2 SeitenListado de Maquinarias Balanzasmarcelo_ortNoch keine Bewertungen
- Manual de Ascensores CCHCDokument28 SeitenManual de Ascensores CCHCbenyi_agusNoch keine Bewertungen
- Diplomado Ingenieria de MantenimientoDokument3 SeitenDiplomado Ingenieria de Mantenimientomarcelo_ortNoch keine Bewertungen
- Normativa de Ascensores Marcelo Soto MINVU PDFDokument45 SeitenNormativa de Ascensores Marcelo Soto MINVU PDFGary LopezNoch keine Bewertungen
- Listado de Maquinarias BalanzasDokument2 SeitenListado de Maquinarias Balanzasmarcelo_ortNoch keine Bewertungen
- Mantenimiento de Ascensores MmoDokument8 SeitenMantenimiento de Ascensores Mmomarcelo_ortNoch keine Bewertungen
- Descriptor Ing - en MantenimientoDokument4 SeitenDescriptor Ing - en Mantenimientomarcelo_ortNoch keine Bewertungen
- 0101-Maf-Codigos Normas Unidades & Tuberias2005Dokument81 Seiten0101-Maf-Codigos Normas Unidades & Tuberias2005Rafael Antonio Vega ReyesNoch keine Bewertungen
- Manual de Implementacao Euro 3 Atego EsDokument274 SeitenManual de Implementacao Euro 3 Atego EsNuilu Garcia100% (1)
- Manual de Implementacao Euro 3 Atego EsDokument274 SeitenManual de Implementacao Euro 3 Atego EsNuilu Garcia100% (1)
- Sistema de Frenos HidráulicosDokument44 SeitenSistema de Frenos HidráulicosEdj SalasNoch keine Bewertungen
- 263 95 eDokument7 Seiten263 95 emarcelo_ortNoch keine Bewertungen
- Curso de Dise o de Tuberias IDokument603 SeitenCurso de Dise o de Tuberias IConstanza I. VergaraNoch keine Bewertungen
- Unidad 2 CochesDokument11 SeitenUnidad 2 Cochesmarcelo_ortNoch keine Bewertungen
- Curso Licencia de GasDokument3 SeitenCurso Licencia de Gasmarcelo_ortNoch keine Bewertungen
- Resumen AngosturaDokument30 SeitenResumen AngosturaEduardo Antonio Duran SepulvedaNoch keine Bewertungen
- Manual Sistema Suspension Direccion Frenos Partes Componentes Clasificacion MecanismoDokument19 SeitenManual Sistema Suspension Direccion Frenos Partes Componentes Clasificacion MecanismoCristhian CenturiónNoch keine Bewertungen
- 40 Practica1Dokument12 Seiten40 Practica1JESUS EDUARDO VAZQUEZ MUNOZNoch keine Bewertungen
- Resortes HelicoidalesDokument5 SeitenResortes HelicoidalesVictor Rivas TemocheNoch keine Bewertungen
- Solución FísicaDokument4 SeitenSolución FísicaJuan SebNoch keine Bewertungen
- Fisica Laboratorio 2 ¿QUÉ MAGNITUDES INFLUYEN SOBRE EL PERIODO DE UN OSCILADOR DE MUELLEDokument16 SeitenFisica Laboratorio 2 ¿QUÉ MAGNITUDES INFLUYEN SOBRE EL PERIODO DE UN OSCILADOR DE MUELLEuribeanderson1100% (1)
- LFQM U2 A2 EvrtDokument3 SeitenLFQM U2 A2 EvrtEvelio Reyes TemoltzinNoch keine Bewertungen
- Lab ResorteDokument2 SeitenLab ResorteSabrina Palazzese Di BasilioNoch keine Bewertungen
- Laboratorio Nº2 Culata Miguel, Luis, Jesus, JulioDokument8 SeitenLaboratorio Nº2 Culata Miguel, Luis, Jesus, JulioMiguel Antonio Martinez AldanaNoch keine Bewertungen
- Trabajo y EnergiaDokument4 SeitenTrabajo y EnergiaKRAYRANNoch keine Bewertungen
- M.A.S. Reporte - OkDokument7 SeitenM.A.S. Reporte - OkCindy Ely Lucero Quispe AndradeNoch keine Bewertungen
- 1-Representacion de SistemasDokument71 Seiten1-Representacion de SistemasluisNoch keine Bewertungen
- Modelo de Proyecto Compresor de Espirales MacphersonDokument60 SeitenModelo de Proyecto Compresor de Espirales Macphersonelisban ninahuillcaNoch keine Bewertungen
- SEMANA 01 - ElasticidadDokument20 SeitenSEMANA 01 - ElasticidadLENIN VLADIMIR INGA HINOSTROZANoch keine Bewertungen
- Informe 2 Constante Elástica Del ResorteDokument10 SeitenInforme 2 Constante Elástica Del ResorteEZRA FABRIZIO CELIZ QUIÑONESNoch keine Bewertungen
- Ciencias NaturalesDokument19 SeitenCiencias NaturalesMaria100% (1)
- Actividades Parcial 1 - 17523Dokument34 SeitenActividades Parcial 1 - 17523Carrizales GerardoNoch keine Bewertungen
- Practica 1 Oscilador ArmonicoDokument4 SeitenPractica 1 Oscilador ArmonicoOmar HernandezNoch keine Bewertungen
- Validacion de Componentes para Una Suspension Neumatica en Un Vehiculo UtilitarioDokument60 SeitenValidacion de Componentes para Una Suspension Neumatica en Un Vehiculo UtilitarioPdroGsus Abregú TerronesNoch keine Bewertungen
- Movimiento OndulatorioDokument7 SeitenMovimiento OndulatorioCarlos Sabogal100% (2)
- Ley de HOOKEDokument5 SeitenLey de HOOKEValeria SalazarNoch keine Bewertungen
- Ley de HookeDokument6 SeitenLey de HookeZoe AyacuchoNoch keine Bewertungen
- Energia Cinetica Unidad 4 OficicallllllDokument17 SeitenEnergia Cinetica Unidad 4 OficicallllllDaniela ValdezNoch keine Bewertungen
- Unidad DidácticaDokument8 SeitenUnidad Didácticaharley sanchezNoch keine Bewertungen
- Capitulo 8 Sistemas Con Varios Grados deDokument15 SeitenCapitulo 8 Sistemas Con Varios Grados deapi-679895763Noch keine Bewertungen
- Practica 1 3CM2 PDFDokument6 SeitenPractica 1 3CM2 PDFNicolás MGNoch keine Bewertungen
- Ejercicios de Energía MecanicaDokument1 SeiteEjercicios de Energía MecanicaLiseth GonzalezNoch keine Bewertungen
- Reoporte - 4 - Antonio SanchezDokument4 SeitenReoporte - 4 - Antonio SanchezJESUS ANTONIO SANCHEZ LEALNoch keine Bewertungen
- Mecánica ClásicaDokument5 SeitenMecánica ClásicaCoral Delgado carrascoNoch keine Bewertungen
- Aporte Ejercicios Fisica Unidad 3Dokument18 SeitenAporte Ejercicios Fisica Unidad 3GademaraNoch keine Bewertungen
- Amortiguadores Ohlins TTX25 MKLLDokument4 SeitenAmortiguadores Ohlins TTX25 MKLLJuan Carlos CastilloNoch keine Bewertungen