Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
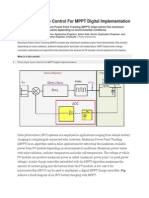
- Direct Duty Cycle Control For MPPT Digital ImplementationDokument5 SeitenDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngNoch keine Bewertungen
- Ethernet IP Texas InstrumentsDokument6 SeitenEthernet IP Texas InstrumentsFranzKafkaNoch keine Bewertungen
- Calculation of Short-Circuit CurrentsDokument35 SeitenCalculation of Short-Circuit CurrentsdaodoquangNoch keine Bewertungen
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDokument44 SeitenEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaNoch keine Bewertungen
- All About HarmonicsDokument240 SeitenAll About HarmonicsKhushal KharadeNoch keine Bewertungen
- Uhc AwatersDokument60 SeitenUhc Awaterskammu9713Noch keine Bewertungen
- The Adventures of Huckleberry Finn by Mark TwainDokument289 SeitenThe Adventures of Huckleberry Finn by Mark TwainBooks100% (5)
- Evaluation and DSP Based Implementation of PWM Approaches For SinDokument90 SeitenEvaluation and DSP Based Implementation of PWM Approaches For SinPhạm Văn TưởngNoch keine Bewertungen
- Control Intelligence Improves Renewable Energy EfficiencyDokument7 SeitenControl Intelligence Improves Renewable Energy EfficiencyPhạm Văn TưởngNoch keine Bewertungen
- Tutorial Digital Control Loop DesignDokument17 SeitenTutorial Digital Control Loop DesignPhạm Văn TưởngNoch keine Bewertungen
- C Programming For Embedded System Applications PDFDokument54 SeitenC Programming For Embedded System Applications PDFWendo David PesaNoch keine Bewertungen
- Study of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuDokument8 SeitenStudy of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuPhạm Văn Tưởng100% (1)
- 309 An 09 Solar Panel PowerDokument3 Seiten309 An 09 Solar Panel PowerJoel Medina GuttiNoch keine Bewertungen
- AN296110 Current Sensing For Renewable EnergyDokument4 SeitenAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngNoch keine Bewertungen
- A Novel Dynamic Var CompensatorDokument4 SeitenA Novel Dynamic Var CompensatorPhạm Văn TưởngNoch keine Bewertungen
- Slaa 075Dokument19 SeitenSlaa 075Manidhar ParvatamNoch keine Bewertungen
- Disturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignDokument10 SeitenDisturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignPhạm Văn TưởngNoch keine Bewertungen
- An Improved PV Battery Charger For Low Cost Low PowerDokument4 SeitenAn Improved PV Battery Charger For Low Cost Low PowerPhạm Văn TưởngNoch keine Bewertungen
- IEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsDokument9 SeitenIEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsPhạm Văn TưởngNoch keine Bewertungen
- IEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityDokument7 SeitenIEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityPhạm Văn TưởngNoch keine Bewertungen
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDokument9 SeitenUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngNoch keine Bewertungen
- (Matsui) Sensorless PM Brushless DC Motor DrivesDokument9 Seiten(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngNoch keine Bewertungen
- 1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemsDokument6 Seiten1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemschethanNoch keine Bewertungen
- Current-Transformer Phase-Shift Compensation and CalibrationDokument7 SeitenCurrent-Transformer Phase-Shift Compensation and CalibrationrsrtnjNoch keine Bewertungen
- Inverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewDokument6 SeitenInverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewPhạm Văn TưởngNoch keine Bewertungen
- TW Exams Ielts How To Prepare Ielts TipsDokument2 SeitenTW Exams Ielts How To Prepare Ielts TipsHoda ElhadaryNoch keine Bewertungen
- NHSPE ReadingDokument5 SeitenNHSPE ReadingMohamed HanafiNoch keine Bewertungen
- Space Vector Modulation An IntroductionDokument10 SeitenSpace Vector Modulation An IntroductionJohan LinderNoch keine Bewertungen
- Phan Tich 1 Bai Task 2 by Ngoc BachDokument4 SeitenPhan Tich 1 Bai Task 2 by Ngoc BachPhạm Văn Tưởng100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- HW1 - 2016 Flight MechanicsDokument2 SeitenHW1 - 2016 Flight MechanicsSerdar BilgeNoch keine Bewertungen
- Signals and Systems (Practice Questions - Z-Transform) PDFDokument28 SeitenSignals and Systems (Practice Questions - Z-Transform) PDFmadivala nagarajaNoch keine Bewertungen
- MRSM Add Maths p1 2005Dokument10 SeitenMRSM Add Maths p1 2005murulikrishan100% (2)
- SOLVING THE STEADY STATE SOLVER AND UNSTEADY or TRANSIENT SOLVER 2D HEAT CONDUCTION PROBLEM BY USINGDokument3 SeitenSOLVING THE STEADY STATE SOLVER AND UNSTEADY or TRANSIENT SOLVER 2D HEAT CONDUCTION PROBLEM BY USINGGodwin LarryNoch keine Bewertungen
- Cadcam Assignments PartADokument4 SeitenCadcam Assignments PartAAnuj ReddyNoch keine Bewertungen
- Laplace Transform: 2.1 What Are Laplace Transforms, and Why?Dokument23 SeitenLaplace Transform: 2.1 What Are Laplace Transforms, and Why?AHMED ALI S ALAHMADINoch keine Bewertungen
- Lesson 1 and 2 - Conic Sections and The CircleDokument30 SeitenLesson 1 and 2 - Conic Sections and The CircleMattheus Marcus ContrerasNoch keine Bewertungen
- B. Frequency Domain Representation of Lti Systems: ObjectiveDokument4 SeitenB. Frequency Domain Representation of Lti Systems: Objectivenaiksuresh100% (1)
- C407X 10Dokument15 SeitenC407X 10nigel agrippaNoch keine Bewertungen
- Legendre Equation ProblemsDokument2 SeitenLegendre Equation ProblemsShahbaz AhmedNoch keine Bewertungen
- MATH 219: Fall 2014Dokument4 SeitenMATH 219: Fall 2014Serdar BilgeNoch keine Bewertungen
- An Isogeometric Analysis Approach For The Study of Structural VibrationsDokument59 SeitenAn Isogeometric Analysis Approach For The Study of Structural VibrationsBharti SinghNoch keine Bewertungen
- Analysis of Strong Stability Preserving Runge-Kutta Time DiscretizationDokument42 SeitenAnalysis of Strong Stability Preserving Runge-Kutta Time Discretizationmoraesgabriel2Noch keine Bewertungen
- Examples in C++Dokument39 SeitenExamples in C++ZhvannNoch keine Bewertungen
- 1000 Ext 2 QuestionsDokument294 Seiten1000 Ext 2 QuestionsMark DanialNoch keine Bewertungen
- 0606 s14 Ms 23Dokument6 Seiten0606 s14 Ms 23AKRAMNoch keine Bewertungen
- Periodic Trajectories of Ellipsoidal Billiards in TheDokument14 SeitenPeriodic Trajectories of Ellipsoidal Billiards in TheDià RaharinanjaNoch keine Bewertungen
- Lab+01-Itr (1) Intro To RoboticsDokument11 SeitenLab+01-Itr (1) Intro To RoboticsEngr Hamza Ali ImranNoch keine Bewertungen
- Merits and Demerits of MeanDokument6 SeitenMerits and Demerits of Meananil gond100% (2)
- The Number of Topologies On A Finite SetDokument9 SeitenThe Number of Topologies On A Finite SetLuz Garcia100% (1)
- 3-Linear OptimizationDokument31 Seiten3-Linear OptimizationJas MinNoch keine Bewertungen
- Signals and Systems SyllabusDokument3 SeitenSignals and Systems SyllabusSeema P DiwanNoch keine Bewertungen
- MATH F113 HandoutDokument2 SeitenMATH F113 HandoutJatinNoch keine Bewertungen
- MA106 Cauchy Condensation TestDokument2 SeitenMA106 Cauchy Condensation TestjohnyNoch keine Bewertungen
- Gujarat Technological University: InstructionsDokument11 SeitenGujarat Technological University: InstructionsdarshakvthakkarNoch keine Bewertungen
- Two Questions of 10 Marks Will Be Set From Each Unit, One Needs To Be Answered From Each UnitDokument7 SeitenTwo Questions of 10 Marks Will Be Set From Each Unit, One Needs To Be Answered From Each UnitMd MamnunNoch keine Bewertungen
- CH 05Dokument41 SeitenCH 05Ng Heng Lim100% (4)
- MBA 19 PAT 302 DS Unit 1.2.2.222Dokument28 SeitenMBA 19 PAT 302 DS Unit 1.2.2.222bhowteNoch keine Bewertungen
- Viii, Ix, X RamanujanDokument4 SeitenViii, Ix, X RamanujanRamesh BabuNoch keine Bewertungen